Awange J.,Grafarend E., Palancz B., Zaletnyik P. Algebraic Geodesy and Geoinformatics
Подождите немного. Документ загружается.

12-3 Ranging by local positioning systems (LPS) 211
12-326 N-point three-dimensional ranging
The Gauss-Jacobi combinatorial algorithm is here applied to solve the overdeter-
mined three-dimensional ranging problem. An example based on the test network
Stuttgart Central in Fig. 10.2 is considered.
Example 12.6 (Three-dimensional ranging to more than three known stations).
From the test network Stuttgart Central in Fig. 10.2 of Sect. 10-6, the three-
dimensional c oordinates {X, Y, Z} of the unknown station K1 are desired. One
proceeds in three steps as follows:
Step 1 (combinatorial solution):
From Fig. 10.2 on p. 150 and using (7.28) on p. 93, 35 combinatorial subsets
are formed whose systems of nonlinear distance equations are solved for the
position {X, Y, Z} of the unknown station K1 in closed form. Use is made
of either Groebner basis derived equations (12.78) and (12.79) or polynomial
resultants derived (12.84) and (12.88). 35 different positions X, Y, Z|
K1
of the
same station K1, totalling to 105 (35 × 3) values of X, Y, Z are obtained and
treated as pseudo-observations.
Step 2 (determination of the dispersion matrix Σ):
The variance-covariance matrix is computed for each of the combinatorial set
j = 1, . . . , 35 using error propagation. The closed form observational equations
are written algebraically as
f
1
:= (X
1
− X)
2
+ (Y
1
− Y )
2
+ (Z
1
− Z)
2
− S
2
1
f
2
:= (X
2
− X)
2
+ (Y
2
− Y )
2
+ (Z
2
− Z)
2
− S
2
2
f
3
:= (X
3
− X)
2
+ (Y
3
− Y )
2
+ (Z
3
− Z)
2
− S
2
3
,
(12.96)
where S
j
i
|i ∈ {1, 2, 3} | j = 1 are the distances between known GPS stations
P
i
∈ E
3
|i ∈ {1, 2, 3} and the unknown station K1 ∈ E
3
for first combination
set j = 1. Equation (12.96) is used to obtain the dispersion matrix Σ in (7.33)
as discussed in Example 7.4 on p. 95.
Step 3 (rigorous adjustment of the combinatorial solution points in a polyhedron):
For each of the 35 computed c oordinates of point K1 in step 2, we write the
observation equations as
X
j
= X + ε
j
X
|, j ∈ {1, 2, 3, 4, 5, 6, 7, . . . , 35}
Y
j
= Y + ε
j
Y
|j ∈ {1, 2, 3, 4, 5, 6, 7, . . . , 35}
Z
j
= Z + ε
j
Z
|, j ∈ {1, 2, 3, 4, 5, 6, 7, . . . , 35}.
(12.97)
The values {X
j
, Y
j
, Z
j
} are treated as pseudo-observation and placed in
the vector of observation y, while the coefficients of the unknown positions
{X, Y, Z} are placed in the design matrix A. The vector ξ comprise the un-
knowns {X, Y, Z}. The solutions are obtained via (7.12) and the root-mean-
square errors of the estimated parameters through (7.13). In the experiment
above, the computed position of station K1 is given in Table 12.14. The de-
viations of the combinatorial s olutions from the true (measured) GPS value
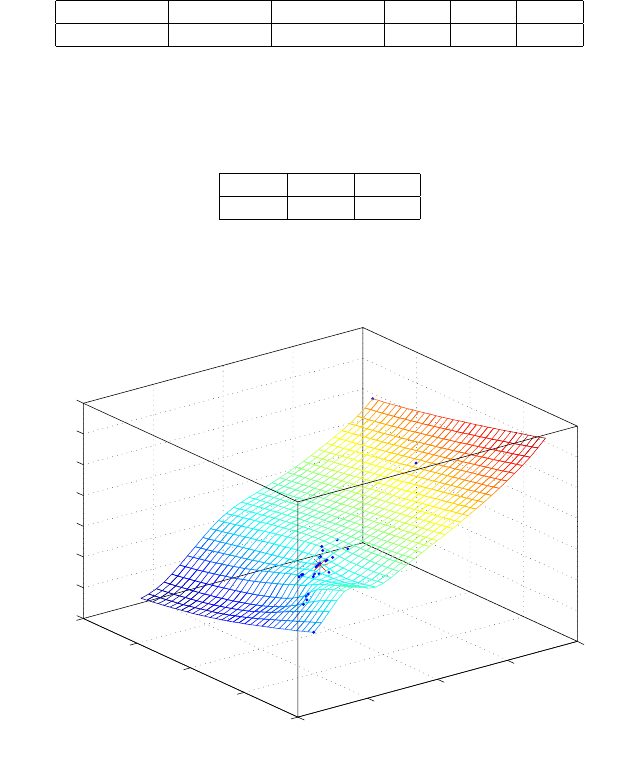
212 12 Positioning by ranging
are given in Table 12.15. Figure 12.17 indicates the plot of the combinatorial
scatter {•} around the adjusted values {∗}.
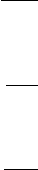
Table 12.14. Position of station K1 computed by Gauss-Jacobi combinatorial algorithm
X(m) Y (m) Z(m) σ
X
σ
Y
σ
Z
4157066.1121 671429.6694 4774879.3697 0.00005 0.00001 0.00005
Table 12.15. Deviation of the computed position of K1 in Table (12.14) from the real
measured GPS values
∆X(m) ∆Y (m) ∆Z(m)
-0.0005 -0.0039 0.0007
0.005
0.01
0.015
0.02
0.025
0.008
0.009
0.01
0.011
0.012
0.055
0.06
0.065
0.07
0.075
0.08
0.085
0.09
X(m)+4157066.1(m)
3d−plot of the scatter of the combinatorial solutions around the adjusted value(set10)
Y(m)+671429.66(m)
Z(m)+4774879.3(m)
Figure 12.17. Scatter of combinatorial solutions
12-327 ALESS solution
Another possibility to solve the overdetermined three-dimensional ranging problem
is the ALESS method (see Sect. 7-2), defining the objective function as the sum
12-3 Ranging by local positioning systems (LPS) 213
of the square residuals of the equations, and considering the necessary condition
for the minimum.
A single equation for distance is given by
e
i
= (X
i
− X
0
)
2
+ (Y
i
− Y
0
)
2
+ (Z
i
− Z
0
)
2
− S
2
i
,
where X
0
, Y
0
, Z
0
are the coordinates of the unknown station, X
i
, Y
i
, Z
i
the coordi-
nates of the known station, and S
i
the measured distances. The objective function
in case of n measured distances is defined as the sum of the square residuals
∆ =
n
X
i=1
e
2
i
=
n
X
i=1
h
(X
i
− X
0
)
2
+ (Y
i
− Y
0
)
2
+ (Z
i
− Z
0
)
2
− S
2
i
i
2
.
The determined square system can be created symbolically easily with Com-
puter Algebra Systems, according to the necessary condition of the minimum,
f
1
=
∂∆
∂X
0
=J
0
+ J
1
X
0
+ J
2
X
2
0
+ J
3
X
3
0
+ J
4
Y
0
+ J
5
X
0
Y
0
+ J
6
Y
2
0
+ J
7
X
0
Y
2
0
+ J
8
Z
0
+ J
9
X
0
Z
0
+ J
10
Z
2
0
+ J
11
X
0
Z
2
0
= 0
f
2
=
∂∆
∂Y
0
=K
0
+ K
1
X
0
+ K
2
X
2
0
+ K
3
Y
0
+ K
4
X
0
Y
0
+ K
5
X
2
0
Y
0
+ K
6
Y
2
0
+ K
7
Y
3
0
+ K
8
Z
0
+ K
9
Y
0
Z
0
+ K =
10
Z
2
0
+ K
11
Y
0
Z
2
0
0
f
3
=
∂∆
∂Z
0
=L
0
+ L
1
X
0
+ L
2
X
2
0
+ L
3
Y
0
+ L
4
Y
2
0
+ L
5
Z
0
+ L
6
X
0
Z
0
+ L
7
X
2
0
Z
0
+ L
8
Y
0
Z
0
+ L
9
Y
2
0
Z
0
+ L
10
Z
2
0
+ L
11
Z
3
0
= 0
where
J
0
→
n
X
i=1
4S
2
i
X
i
− 4X
3
i
− 4X
i
Y
2
i
− 4X
i
Z
2
i
, J
1
→
n
X
i=1
−4S
2
i
+ 12X
2
i
+ 4Y
2
i
+ 4Z
2
i
,
J
2
→
n
X
i=1
−12X
i
, J
3
→ 4n, J
4
→
n
X
i=1
8X
i
Y
i
, J
5
→
n
X
i=1
−8Y
i
, J
6
→
n
X
i=1
−4X
i
, J
7
→ 4n,
J
8
→
n
X
i=1
8X
i
Z
i
, J
9
→
n
X
i=1
−8Z
i
, J
10
→
n
X
i=1
−4X
i
, J
11
→ 4n
K
0
→
n
X
i=1
4S
2
i
Y
i
− 4X
2
i
Y
i
− 4Y
3
i
− 4Y
i
Z
2
i
, K
1
→
n
X
i=1
8X
i
Y
i
, K
2
→
n
X
i=1
−4Y
i
,
K
3
→
n
X
i=1
−4S
2
i
+ 4X
2
i
+ 12Y
2
i
+ 4Z
2
i
, K
4
→
n
X
i=1
−8X
i
, K
5
→ 4n, K
6
→
n
X
i=1
−12Y
i
,
K
7
→ 4n, K
8
→
n
X
i=1
8Y
i
Z
i
, K
9
→
n
X
i=1
−8Z
i
, K
10
→
n
X
i=1
−4Y
i
, K
11
→ 4n
214 12 Positioning by ranging
L
0
→
n
X
i=1
4S
2
i
Z
i
− 4X
2
i
Z
i
− 4Y
2
i
Z
i
− 4Z
3
i
, L
1
→
n
X
i=1
8X
i
Z
i
, L
2
→
n
X
i=1
−4Z
i
,
L
3
→
n
X
i=1
8Y
i
Z
i
, L
4
→
n
X
i=1
−4Z
i
, L
5
→
n
X
i=1
−4S
2
i
+ 4X
2
i
+ 4Y
2
i
+ 12Z
2
i
,
L
6
→
n
X
i=1
−8X
i
, L
7
→ 4n, L
8
→
n
X
i=1
−8Y
i
, L
9
→ 4n, L
10
→
n
X
i=1
−12Z
i
, L
11
→ 4n
Now this third order polynomial square system is to be solved. The complexity
of this system is independent of the number of redundant data. Only the coefficients
will change if more measured distances are available. To demonstrate the method,
let us revisit the test network Stuttgart Central (see data on Tables 10.1 and 10.2)
with seven distances to seven known stations. Substituting these data for f
1
, f
2
, f
3
leads to the following system for solving the unknown station K1:
f
1
= −4.71777 × 10
21
+ 2.10263 × 10
15
X
0
− 3.49196 × 10
8
X
2
0
+ 28X
3
0
+1.56321 × 10
14
Y
0
− 3.76035 × 10
7
X
0
Y
0
− 1.16399 × 10
8
Y
2
0
+ 28X
0
Y
2
0
+1.11156 × 10
15
Z
0
− 2.6739 × 10
8
X
0
Z
0
− 1.16399 × 10
8
Z
2
0
+ 28X
0
Z
2
0
f
2
= −7.62057 ×10
20
+ 1.56321 × 10
14
X
0
− 1.88017 × 10
7
X
2
0
+1.16012 × 10
15
Y
0
− 2.32797 × 10
8
X
0
Y
0
+ 28X
2
0
Y
0
− 5.64052 × 10
7
Y
2
0
+28Y
3
0
+ 1.7955 × 10
14
Z
0
− 2.6739 × 10
8
Y
0
Z
0
− 1.88017 × 10
7
Z
2
0
+ 28Y
0
Z
2
0
f
3
= −5.41882 × 10
21
+ 1.11156 × 10
15
X
0
− 1.33695 × 10
8
X
2
0
+ 1.7955 × 10
14
Y
0
−1.33695 × 10
8
Y
2
0
+ 2.41161 × 10
15
Z
0
− 2.32797 × 10
8
X
0
Z
0
+ 28X
2
0
Z
0
−3.76035 × 10
7
Y
0
Z
0
+ 28Y
2
0
Z
0
− 4.01085 × 10
8
Z
2
0
+ 28Z
3
0
Groebner Basis methods is then applied to solve this system of equation. Let us
use high precision data in Mathematica:
F = SetP recision[{f1, f2, f3}, 300];
To solve this system with reduced Groenber basis for variable X
0
in Mathematica,
one writes:
gbX
0
= GroebnerBasis[F, {X
0
}, {Y
0
, Z
0
}];
where F is the system of polynomials {f
1
, f
2
, f
3
} using high precision data,
{Y
0
, Z
0
} are the variables to be eliminated from the system and {X
0
} the re-
maining variable. The result is a univariate polynomial of order seven for X
0
. Its
roots are,

12-3 Ranging by local positioning systems (LPS) 215
{X
0
→ 4.1570478280643144805 × 10
6
− 17.7824555537030i},
{X
0
→ 4.1570478280643144805 × 10
6
+ 17.7824555537030i},
{X
0
→ 4.1570661115296523158 × 10
6
},
{X
0
→ 4.1571001585939538923 × 10
6
− 169.0166013474395i},
{X
0
→ 4.1571001585939538923 × 10
6
+ 169.0166013474395i},
{X
0
→ 4.1571279473843755008 × 10
6
− 270.2601421331170i},
{X
0
→ .1571279473843755008 × 10
6
+ 270.2601421331170i},
where the only real root is X
0
= 4157066.1115. Similarly, the variables Y
0
and Z
0
can be calculated by
gbY
0
= GroebnerBasis[F, {Y
0
}, {X
0
, Z
0
}];
gbZ
0
= GroebnerBasis[F, {Z
0
}, {X
0
, Y
0
}].
For both variables we get a seven order univariate polynomial using reduced Groeb-
ner basis, which has only one real root. The computed position of station K1 and
the deviations of the ALESS solution from the true (measured) GPS value are
given in Table 12.16. The re sult of the ALESS method coincides with the mea-
sured GPS coordinates.
Table 12.16. Position of station K1 computed by ALESS method
X(m) Y (m) Z(m) ∆X(m) ∆Y (m) ∆Z(m)
4 157 066.1115 671 429.6655 4 774 879.3703 0.0001 0.0000 0.0001
12-328 Extended Newton-Raphson’s solution
With more than 3 known stations with the corresponding distances, our system is
overdetermined, m > n, where n = 3 and m = 7! The prototype of the equations,
(x
i
− x
0
)
2
+ (y
i
− y
0
)
2
+ (z
i
− z
0
)
2
− s
2
i
= 0, i = 1..7, (12.98)
where ( x
i
, y
i
, z
i
) are the known coordinates of the i
th
station, s
i
the known
distance of the i
th
station, and ( x
0
, y
0
, z
0
) the unknown coordinates of the K1
station, see Fig. 10.2 in p.150 for the Stuttgart Central Test Network.
Using the GPS coordinates in Table 10.1 and the distances indicated in Fig.
10.2, and consider the initial value as the results of the 3-point problems solved
via computer algebra (see Awange-Grafarend [41]), one can employ the Extended
Newton-Raphson method. Let us consider the solution of the {1 - 2 - 7) combina-
tion,
x
0
= 4.15707550749 × 10
6
, y
0
= 671431.405189, z
0
= 4.7748874158 × 10
6
(12.99)
216 12 Positioning by ranging
0
1
2
3
4
5
6
0
2
4
6
8
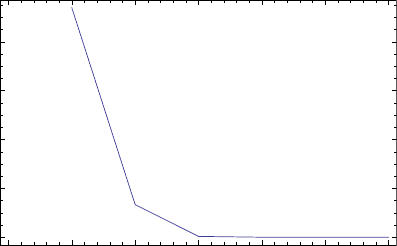
N
umber of iteration
s
E
rror of x
0
Figure 12.18. Convergence of the method in case of Stuttgart Central Test Network
Employing Extended Newton-Raphson method, the convergence is fast. Fig. 12.18
shows the absolute error of x
0
in meter as function of the number of iterations
where n = 3 and m = 7.
The solution is
x
0
= 4.15706611153 × 10
6
, y
0
= 671429.665479, z
0
= 4.77487937031 × 10
6
(12.100)
12-4 Concluding remarks
In cases where positions are required from distance measurements such as point
location in engineering and cadastral surveying, the algorithms presented in this
chapter are handy. Users need only to insert measured distances and the coordi-
nates of known stations in these algorithms to obtain their positions. In essence,
one does not need to re-invent the wheel by going back to the Mathematica soft-
ware! Additional literature on the topic are [1, 54, 105, 204, 253, 346].
13 Positioning by resection methods
13-1 Resection problem and its importance
In Chap. 12, ranging method for positioning was presented where distances were
measured to known targets. In this chapter, an alternative positioning technique
which uses direction measurements as opposed to distances is presented. This po-
sitioning approach is known as the resection. Unlike in ranging where measured
distances are affected by atmospheric refraction, resection methods have the ad-
vantage that the measurements are angles or directions which are not affected by
refraction.
Resection methods find use in densification of GPS networks. In Fig. 12.1
for example, if the station inside the tunnel or forest is a GPS station, a GPS
receiver can not be used due to signal blockage. In such a cas e, horizontal and
vertical directions are measured to three known GPS stations using a theodolite
or total station operating in the local pos itioning systems (LPS). These angular
measurements are converted into global reference frame’s equivalent using (10.18)
and (10.19). The coordinates of the unknown tunnel or forest station is finally
computed using resection techniques that we will discuss later in the chapter. A
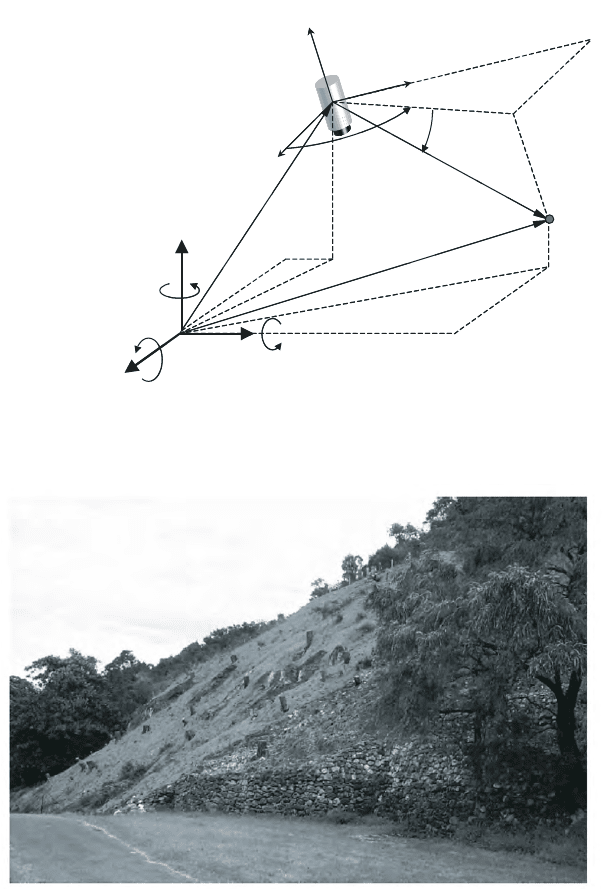
more recent application of resection is demonstrated by [154] who applies it to
find the position and orientation of scanner head in object space (Fig. 13.1
1
).
The scanner is then used to monitor deformation of a steep hillside in Fig. 13.2
1
which was inaccessible. The only permissible deformation monitoring method was
through remote sensing scanning technique.
To understand the resection problem, consider Fig. 13.3. The planar (two-
dimensional) resection problem is formulated as follows: Given horizontal direction
measurements T
i
from unknown station P
0
∈ E
2
to three known stations P
i
|i =
1, 2, 3 ∈ E
2
in Fig. 13.3, determine the position {x
0
, y
0
} and orientation {σ} of P
0
.
For the three-dimensional resection, the unknown position {X
0
, Y
0
, Z
0
} of point
P
0
∈ E
3
and the orientation unknown Σ have to be determined. In this case
therefore, in addition to horizontal directions T
i
, vertical directions B
i
have to
be measured. In photogrammetry, image coordinates on the photographs are used
instead of direction measurements.
Equations relating unknowns and the measurements are nonlinear and the
solution has been by linearized numerical iterative techniques. This has been
mainly due to the difficulty of solving in closed form the underlying nonlinear
systems of equations. Procedures for solving planar nonlinear resection are re-
ported by [85] to exceed 500! Several procedures put forward as early as 1900
concentrated on the solution of the overdetermined version as evidenced in the
works of [206, 349, 408, 409, 410]. Most of these works were based on the graphical
approaches. Procedures to solve closed form planar resection were put forward
by [92] and later by [15, 35, 78, 187, 237].
1
Courtesy of Survey Review: Gordon and Lichti (2004)
J.L. Awange et al., Algebraic Geodesy and Geoinformatics, 2nd ed.,
DOI 10.1007/978-3-642-12124-1 13,
c
Springer-Verlag Berlin Heidelberg 2010
218 13 Positioning by resection methods
f
s
a
q
S
P
Y
X
Z
Object Space
Scanner Space
y
x
z
O
Y
p
X
p
Z
p
x
p
y
p
z
p
X
s
Y
s
Z
s
w
k
f
s
a
q
S
P
Y
X
Z
Object Space
Scanner Space
y
x
z
O
Y
p
X
p
Z
p
x
p
y
p
z
p
X
s
Y
s
Z
s
w
k
Figure 13.1. Position and orientation of scanner head
c
Survey Review: Gordon and Lichti (2004)
Figure 13.2. Slope and Lower Walkway at Kings Park
c
Survey Review: Gordon and Lichti (2004)
The search towards the solution of the three-dimensional resection problem
traces its origin to the work of a German mathematician J. A. Grunert [194] whose
publication appeared in the year 1841. Grunert (1841) solved the three-dimensional
13-1 Resection problem and its importance 219
P
2
P
2
P1
P0
P3
Figure 13.3. Planar distance observations
resection problem – what was then known as the “Pothenot’s” problem – in a closed
form by solving an algebraic equation of degree four. The problem had hitherto
been solved by iterative means mainly in photogrammetry and computer vision.
Procedures developed later for solving the three-dimensional resection problem
revolved around improvements of the approach of [194] with the aim of searching
for optimal means of distances determination. Whereas [194] s olved the problem
by substitution approach in three steps, more recent desire has been to solve the
distance equations in less steps as exemplified in the works of [133, 135, 187, 275,
276, 301]. In [210, 211, 307], extensive review of these procedures are presented.
Other solutions of three-dimensional resection include the works of [14, 27, 28,
154] among others. The closed form solution of overdetermined three-dimensional
resection is presented in [29] and elaborate literature on the subject presented
in [14].
In this chapter, Grunert’s distance equations for three-dimensional resection
problem are solved using the algebraic techniques of Groebner basis and poly-
nomial resultants. The resulting quartic polynomial is solved for the unknown
distances and the admissible solution substituted in any equation of the original
system of polynomial equations to determine the remaining two distances. Once
distances have been obtained, the position {X
0
, Y
0
, Z
0
} are computed using the
ranging techniques discussed in Chap. 12. The three-dimensional orientation un-
known Σ is thereafter solved using partial Procrustes algorithm of Chap. 9.

220 13 Positioning by resection methods
13-2 Geodetic resection
13-21 Planar resection
For planar resection, if the horizontal directions are oriented arbitrarily, the un-
known orientation in the horizontal plane σ has to be determined in addition to po-
sition {x, y} of the observing unknown station. The coordinates X
i
, Y
i
| i ∈ {1, 2, 3}
of the known target stations P
i
∈ E
2
| i ∈ {1, 2, 3} are given in a particular refer-
ence frame. Horizontal directions T
i
| i ∈ {1, 2, 3} are observed from an unknown
station to the three known target stations. The task at hand as already stated
in Sect. 13-1 is to determine the unknowns {x, y, σ}. The observation equation is
formulated as
tan(T
i
+ σ) =
y
i
− y
x
i
− x
| ∀
i
= 1, 2, 3. (13.1)
Next, we present three approaches which can be used to solve (13.1) namely;
conventional analytical solution, Groebner basis and Sylvester resultants methods.
13-211 Conventional analytical solution
Using trigonometric additions theorem as suggested by [92], (13.1) is expressed as
tan T
i
+ tan σ
1 − tan T
i
tan σ
=
y
i
− y
x
i
− x
| ∀
i
= 1, 2, 3, (13.2)
leading to
(tan T
i
+ tan σ)(x
i
− x) = (1 − tan T
i
tan σ)(y
i
− y). (13.3)
Expanding (13.3) gives
y(tan T
i
tan σ) −y
i
(tan T
i
tan σ) −y + y
i
= x
i
tan T
i
+ x
i
tan σ −xtan T
i
−xtan σ. (13.4)
Equation (13.4) leads to a nonlinear system of equations in the unknowns
{x, y, σ} as
y(tanT
1
tan σ) − y
1
(tanT
1
tan σ) − y + y
1
= x
1
tanT
1
+ x
1
tan σ − xtanT
1
− xtan σ
y(tanT
2
tan σ) − y
2
(tanT
2
tan σ) − y + y
2
= x
2
tanT
2
+ x
2
tan σ − xtanT
2
− xtan σ
y(tanT
3
tan σ) − y
3
(tanT
3
tan σ) − y + y
3
= x
3
tanT
3
+ x
3
tan σ − xtanT
3
− xtan σ,
(13.5)
which is solved in three steps for σ and then s ubstituted in the first two equa-
tions of (13.5) to obtain the unknowns {x, y}. The procedure is performed stepwise
as follows: