Atkinson K. An Introduction to Numerical Analysis
Подождите немного. Документ загружается.

THE TRAPEZOIDAL METHOD
371
with z
0
= Y
0
+ t:. To analyze the effect of the perturbation in the initial value, let
wn
=
zn-
Yn·
Subtracting,
n~O
( 6.5.23)
This is simply the trapezoidal method applied
to
our model problem, except that
the initial value
is
t:
rather than
1.
The numerical solution in (6.5.23) is simply
t:
times that obtained in the numerical solution· of (6.5.20). Thus the behavior of the
numerical solution of the model problem (6.5.20) will
give
us the stability
behavior of the trapezoidal rule applied
to
(6.5.21).
The model problems in which
we
are interested are those for which A
is
real
and
negative
or
A is complex with negative real part. The reason for this choice is
that then the differential equation problem (6.5.21) is well-conditioned,
as
noted
in (6.1.8), and the major interesting cases excluded are
A = 0 and A strictly
imaginary.
Applying the trapezoidal rule to (6.5.20),
Then
Inductively
hA
Yn+I
=
Yn
+
T(Yn
+
Yn+I]
[
1
+
(hA/2)]
Yn+I
=
1
_
(hA/
2
)
Yn
=
[1
+
{hA/2)]n
Yn
1-
{hA/2)
Yo=
1
n~O
n~O
provided
hA
=F
2.
For the case of real A <
0,
write
1
+
(hA/2)
hA
2
r=
=1+
=-1+----
1 -
(hA/2)
1 -
(hA/2)
. 1 -
(hA/2)
This shows - 1 < r < 1 for
all
values of h >
0.
Thus
. Limityn
= 0
n->oo
(6.5.24)
(6.5.25)
There are
no
limitations on h
in
order to have boundedness. of
{Yn},
and thus
stability of the numerical method in (6.5.22)
is
assured for all h > 0 and all
======================'· J A <
0.
This is a stronger statement than is possible with most numerical methods,
where generally
h must be sufficiently small to ensure stability.
For
certain
applications, stiff differential equations, this is an important consideration. The
property that (6.5.25) holds for
all h > 0 and all complex A with Real(A) < 0 is
called
A-stability.
We
explore it further
in
Section 6.8 and Problem
37.
372
NUMERICAL
METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
Richardson error estimation This error estimation
was
introduced in Section
5.4,
and
it was used both to predict the error [as in (5.4.42)] and to obtain a more
rapidly convergent numerical integration method
[as
in (5.4.40)].
It
can also be
used in both
of
these ways in solving differential equations, although we will use
it mainly to predict the error.
Let
Yh(x)
and y
2
h(x)
denote the numerical solutions to
y'
=
j(x,
y)
on
[x
0
,
b], obtained using the trapezoidal method (6.5.2). Then using (6.5.19),
Y(xJ-
Yh(xn)
=
D(xn)h
2
+
O(h
3
)
Y(xn)-
Y2h(xn) =
4D(xn)h
2
+
O(h
3
)
Multiply the first equation by four, subtract the second, and solve for
Y(xn):
(6.5.26)
The formula
on
the right side has a higher order of convergence than the
trapezoidal method, but note that it requires the computation of
yh(xn)
and
y
2
h(xn) for all nodes xn in [x
0
,
b].
The formula (6.5.26)
is
of greater use in predicting the global error in
yh(x).
Using (6.5.26),
The left side is
O(h
2
),
from (6.5.19), and thus the first term on the right side must
also be
0(
h
2
).
Thus
(6.5.27)
is
an
asymptotic estimate of the error. This
is
a practical procedure for estimating
the global error, although the way we have derived it does not allow for a variable
stepsize in the nodes
..
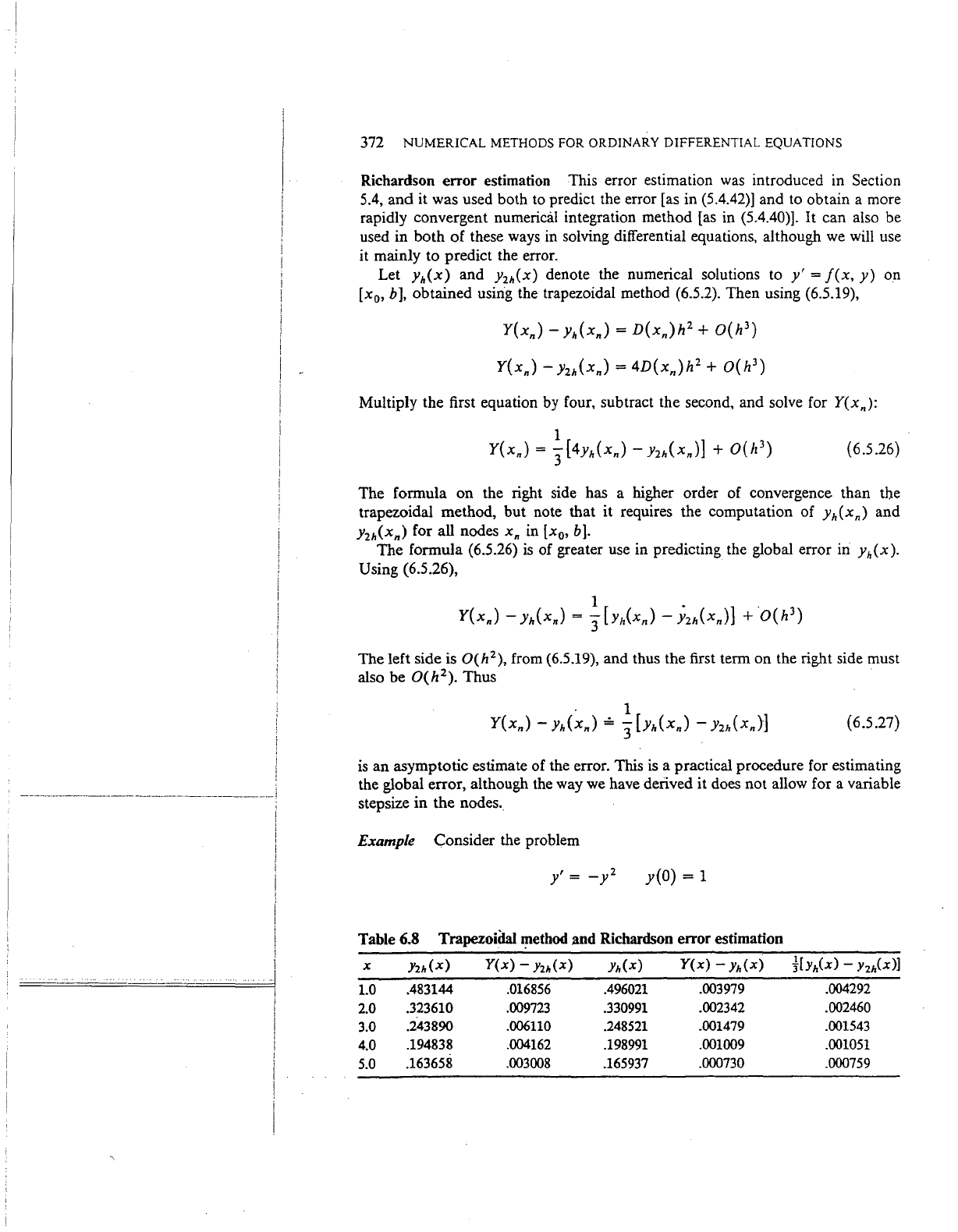
Example Consider the problem
y'
=
-y2
y(O) = 1
Table 6.8
Trapezoidal
~ethod
and Richardson error estimation
X
Y2h(x)
Y(x)-
y
21
,(x)
Yh(x)
Y(x)-
Yh(x)
f[yh(x)
- Y2h(x)]
1.0
.483144 .016856 .496021
.003979 .004292
2.0
.323610 .009723 .330991
.002342
.002460
3.0
.243890 .006110
.248521 .001479 .001543
4.0
.194838
.004162
.198991 .001009 .001051
5.0
.163658
.003008
.165937
.000730 .000759
A LOW-ORDER PREDICTOR-CORRECTOR ALGORITHM
373
which has the solution
Y(x)
=
1/(1
+
x).
The results in Table
6.8
are for
stepsizes
h =
.25
and 2h =
.5.
The last column
is
the error estimate (6.5.27), and
it is an accurate estimator of the true error
Y(x)-
yh(x).
6.6 A Low-Order Predictor-Corrector Algorithm
In this section, a fairly simple algorithm is described for solving the initial value
problem
(6.0.1).
It
uses
the trapezoidal method (6.5.2), and it controls the size of
the local error by varying the stepsize
h. The method is not practical because of
its low order of convergence, but it demonstrates some of the ideas and
techniques involved
in
constructing a variable-stepsize predictor-corrector al-
gorithm.
It
is
also simpler to understand than algorithms based on higher order
methods.
Each step from xn
to
xn+
1
will consist of constructing
Yn+
1
from
Yn
and
Yn-
1
,
and
Yn+
1
will be an approximate solution of (6.5.2) based on using some iterate
from
(6.5.3). A regular step has xn+
1
-
xn
=
xn-
xn_
1
=
h,
the midpoint
predictor (6.5.15)
is
used, and the local error is predicted using the difference of
the predictor and corrector formulas. When the stepsize is being changed, the
Euler predictor (6.5.12)
is
used.
The user of the algorithm
will
have to specify several parameters in addition to
those defining the differential equation problem (6.0.1). The stepsize
h will vary,
and the user must specify values
h min and h max that limit the size of h. The user
should also specify an initial value for
h; and the value should be one for which
ihfy(x
0
,
y
0
)
is
sufficiently less than 1 in magnitude, say less than 0.1. This
quantity
will
determine the speed of convergence of the iteration in (6.5.3) and
is
discussed later in the section, following the numerical example. An error toler-
ance
t:
must be given, and the stepsize h
is
so chosen that the local error trunc
satisfies
(6.6.1)
at
each step. This
is
called controlling the error
per
unit stepsize. Its significance is
discussed near the end of the section.
The notation of the preceding section
is
continued. The function
un(x)
is the
solution of
y'
=
f(x,
y)
that passes through
(xn,
Yn). The local error to be
estimated and controlled
is
(6.5.11), which
is
the error in obtaining un(xn+
1
)
using the trapezoidal method:
h =
Xn+
1
-
Xn
(6.6.2)
If
Yn
is sufficiently close to Y(xn), then this is a good approximation to the
closely related truncation error in (6.5.1):
i
------·----·-·------·-----·---------··------·····--·")
I
I
I
I
I
I
~j
374
NUMERICAL
METHODS FOR
ORDINARY
DIFFERENTIAL
EQUATIONS
And
(6.6.2)
is
the only quantity for which
we
have the information needed to
control it.
Choosing the initial stepsize The problem
is
to
find
an initial value of h and
node x
1
= x
0
+
h,
for which
IY
1
-
Y(x
1
)1
satisfies the bounds in (6.6.1). With
the initial
h supplied by the user, the value Jh(x
1
)
is obtained by using the Euler
predictor
(6.5.12) and iterating twice in (6.5.3). Using the same procedure, the
values
yh
12
(x
0
+
h/2)
and Yh;
2
(x
1
)
are also calculated. The Richardson ex-
trapolation procedure
is
used to predict the error in Yh(x
1
),
(6.6.3)
If
this error satisfies the bounds of (6.6.1), then the value of h
is
accepted, and
the regular trapezoidal step using the midpoint predictor
(6.5.15)
is
begun. But if
(6.6.1) is
not
satisfied by (6.6.3), then a new value of h
is
chosen.
Using the values
obtain the approximation
(6.6.4)
This is
an
approximation using the second-order divided difference of Y' =
f(x,
Y); for example, apply Lemma 2 of Section 3.4. For any small stepsize h,
the truncation error at x
0
+ h is well approximated by
The new stepsize
h is chosen so that
_r£
h = v
TD;YI
(6.6.5)
This should place the initial truncation error in approximately the middle of the
range (6.6.1) for the error per unit step criterion. With this new value of
h, the
test using (6.6.3) is again repeated,
as
a safety check.
By
choosing h so that the truncation error will satisfy the bound (6.6.1) when
it is doubled
or
halved,
we
ensure that the stepsize will not have to be changed
A LOW-ORDER PREDICTOR-CORRECTOR ALGORITHM
375
for several steps, provided the derivative Y(3)(x) is not changing rapidly. Chang-
ing the stepsize
will
be more expensive than a normal step, and
we
want to
minimize the need for such changes.
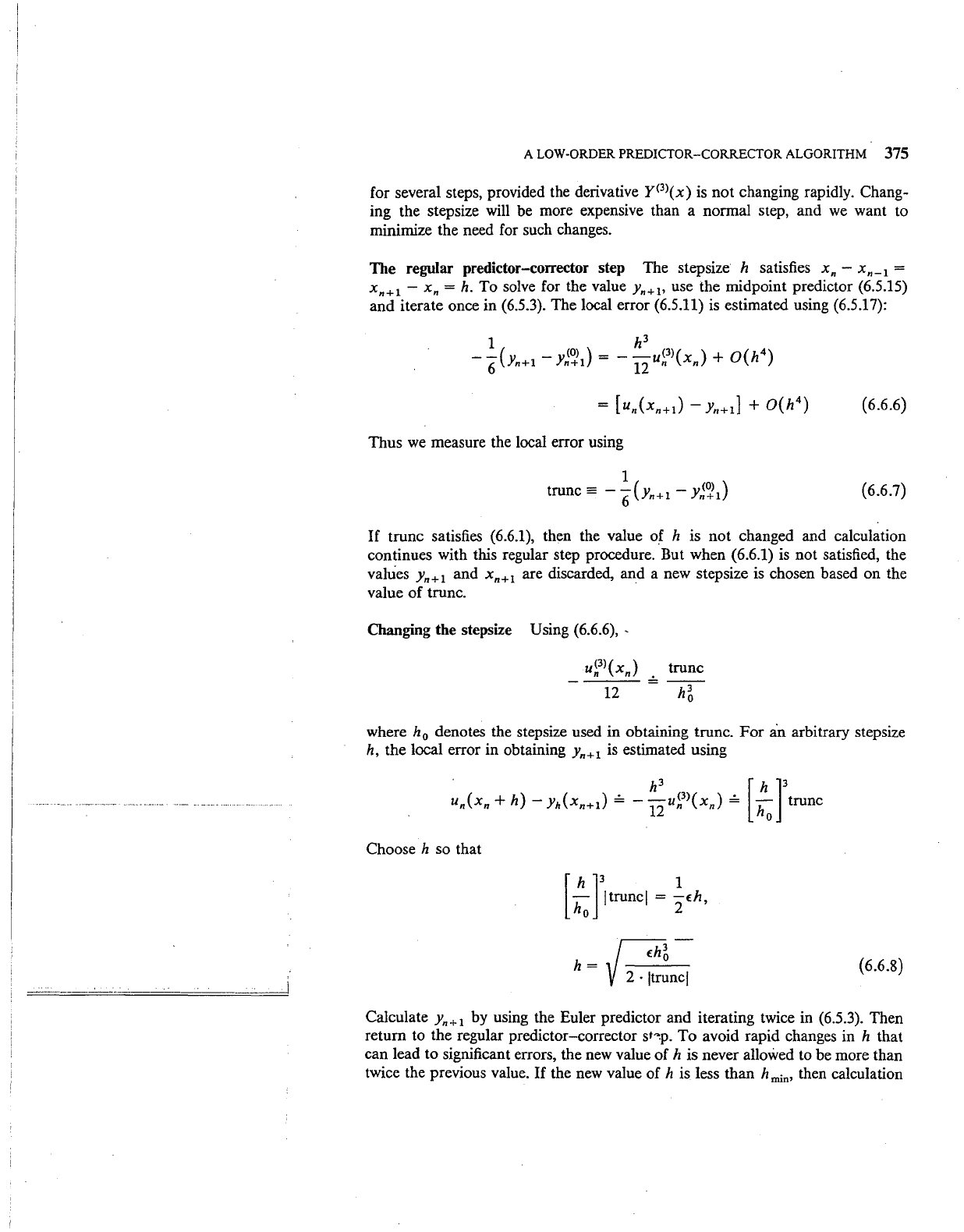
The regular predictor-corrector step The stepsize
h satisfies
xn-
xn-l
=
xn+l-
xn
=h.
To
solve
for the value
Yn+l•
use the midpoint predictor (6.5.15)
and iterate once in (6.5.3). The local error (6.5.11)
is
estimated using (6.5.17):
1 h
3
-
-("
-
y<
0
> ) = -
-u<
3
>(x
) +
O(h
4
)
6
Jn+l
n+l
12 n n
(6.6.6)
Thus
we
measure the local error using
(6.6.7)
If
trunc satisfies (6.6.1), then the value of h is not changed and calculation
continues with this regular step procedure. But when (6.6.1) is not satisfied, the
values
Yn+l
and
xn+l
are discarded, and a new stepsize is chosen based on the
value
of
trunc.
Changing the stepsize
Using (6.6.6), -
trunc
h~
where h
0
denotes the stepsize used in obtaining trunc.
For
an arbitrary stepsize
h, the local error in obtaining
Yn+l
is estimated using
Choose
h so that
[
h
]3
1
ho
jtruncj = 2£h,
(6.6.8)
Calculate
Yn+l
by using the Euler predictor and iterating twice
in
(6.5.3). Then
return
to
the regular predictor-corrector
st~p.
To
avoid rapid changes in h that
can lead to significant errors, the new value of
h is never allowed
to
be more than
twice the previous value.
If
the new value of h is less than h min• then calculation
'
I
I
I
----------------------------------------··--·---··--
j
376 NUMERICAL METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
·is
terminated. But if the
new
value of h
is
greater than h
max•
we
just
let h = h max
and proceed with the calculation. This has possible problems, which are discussed
following the numerical example.
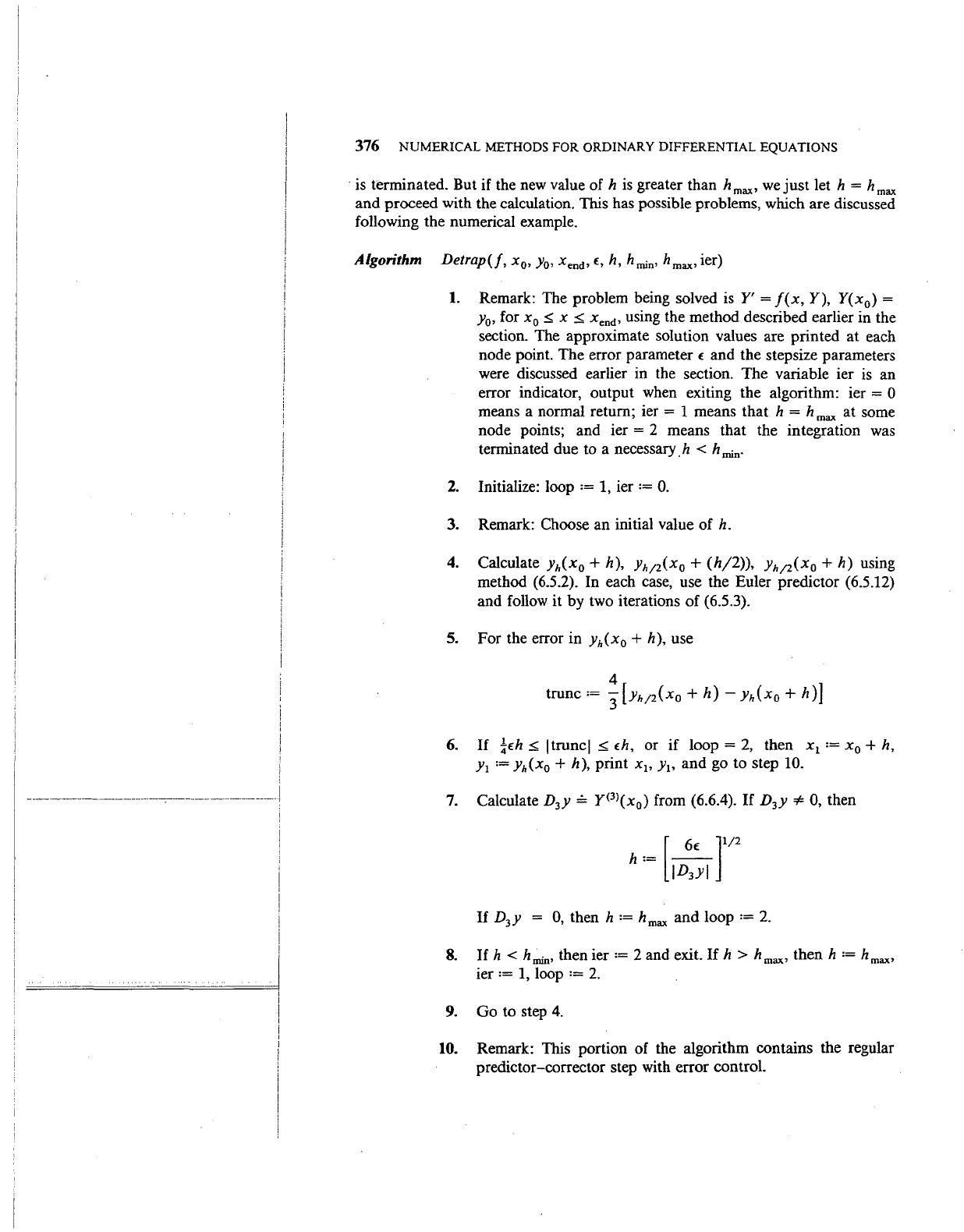
Algorithm Detrap(J, x
0
,
y
0
,
X
end•
£,
h, h min•
hmax•
ier)
1.
Remark: The problem being solved
is
Y' =
f(x,
Y), Y(x
0
)
=
y
0
,
for x
0
:S:
x
:S:
Xend•
using the method described earlier in the
section. The approximate solution values are printed at each
node point. The error parameter
f and the stepsize parameters
were discussed earlier in the section. The variable ier
is
an
error indicator, output when exiting the algorithm: ier =
0
means a normal return; ier = 1 means that h = h max
at
some
node points; and ier = 2 means that the integration was
terminated due to a necessary.
h < h min·
2. Initialize: loop
==
1, ier
==
0.
3. Remark: Choose an initial value of
h.
4. Calculate Yh(x
0
+h),
Yh;
2
(x
0
+
(h/2)),
Yh;
2
(x
0
+h)
using
method (6.5.2). In each case, use the Euler predictor (6.5.12)
and follow it by two iterations of
(6.5.3).
5. For the error in Yh(x
0
+h),
use
6.
If
±Eh
:s;
!trunci
:s;
Eh,
or if loop =
2,
then x
1
==
x
0
+ h,
y
1
==
Yh(x
0
+ h), print x
1
,
y
1
,
and go to step 10.
7.
Calculate D
3
y
,;,
y<3>(x
0
)
from (6.6.4).
If
D
3
y *
0,
then
If
D
3
y =
0,
then h
==
h max and loop
==
2.
8.
If
h <
hmin•
then ier := 2 and exit.
If
h >
hmax•
then h
==
hmax•
ier
==
1,
loop==
2.
9.
Go to step
4.
10. Remark: This portion of the algorithm contains the regular
predictor-corrector step with error control.
A LOW-ORDER PREDICTOR-CORRECTOR ALGORITHM
377
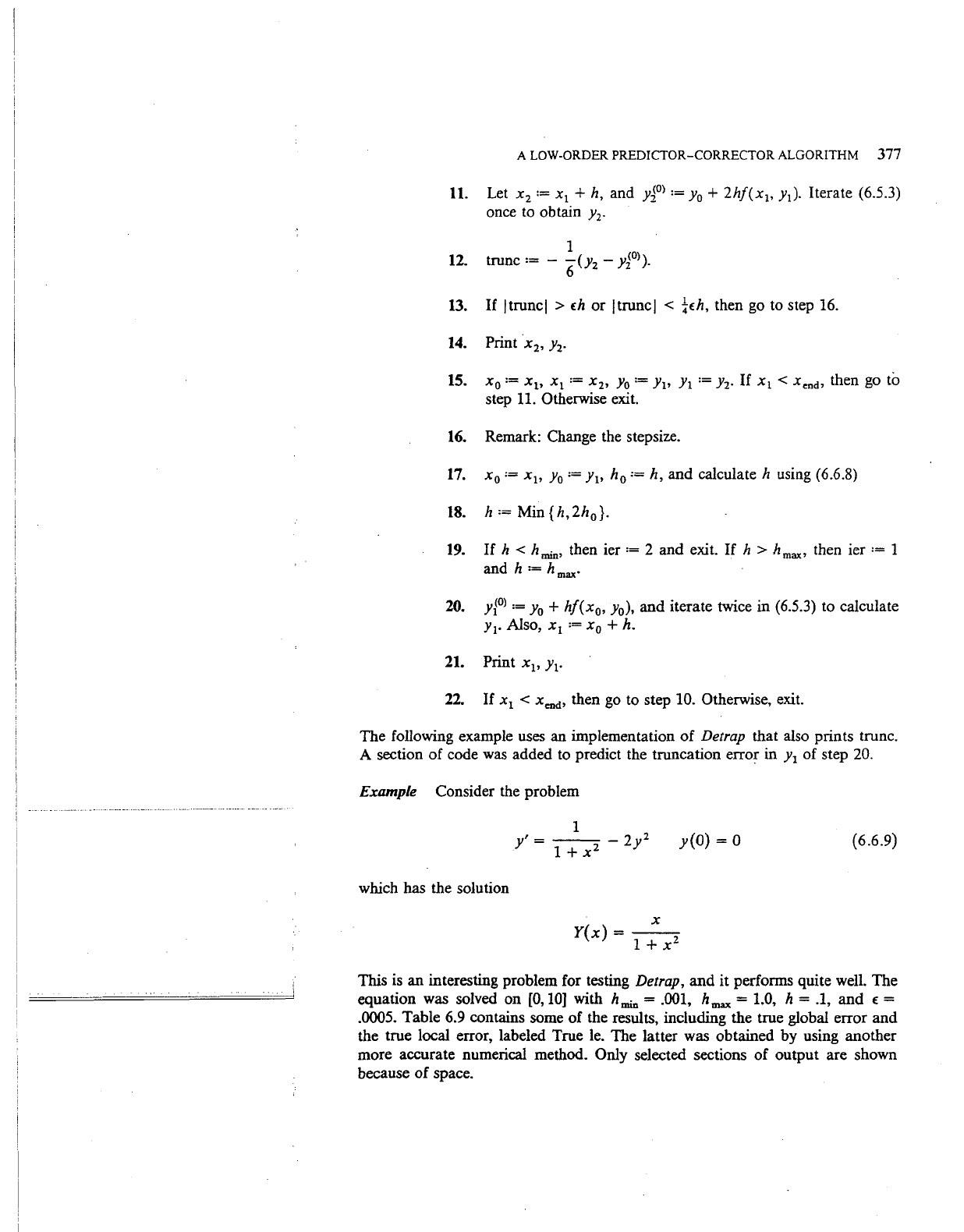
1L
Let x
2
•=
x
1
+
h,
and
y4°)
•=
Yo+
2hf(x
1
,
y
1
).
Iterate (6.5.3)
once to obtain
y
2
•
13.
If
jtruncj >
£h
or
jtruncj <
i£h,
then go to step 16.
14.
Print x
2
,
h
15.
x
0
==
x
1
,
x
1
•=
x
2
,
y
0
==
y
1
,
y
1
•=
Y2·
If
x
1
< xend• then go to
step 11. Otherwise exit.
16. Remark: Change the stepsize.
17.
x
0
:=
x
1
,
y
0
•=
y
1
,
h
0
==
h,
and
calculate h using (6.6.8)
18.
h
:=
Min {
h,
2h
0
}.
19.
If
h < hmm, then ier
•=
2
and
exit.
If
h >
hmax•
then ier
:=
1
and
h
·=
h max·
20.
yf
0
>
•=
Yo
+
hf(x
0
,
y
0
),
and
iterate twice
in
(6.5.3) to calculate
y
1
•
Also, x
1
:=
x
0
+h.
21. Print x
1
,
Jt.
22.
If
x
1
<
xend,
then go to step 10. Otherwise, exit.
The
following example uses
an
implementation
of
Detrap that also prints trunc.
A section
of
code was added to predict the truncation error in y
1
of
step 20.
Example Consider the problem
which has the solution
1
y'
=
----
2y2
1 + x
2
X
Y(x)
= 1 +
x2
y(O)
= 0 (6.6.9)
This is
an
interesting problem for testing Detrap,
and
it performs quite well.
The
equation was solved
on
[0,
10]
with
hmin
= .001,
hmax
= 1.0, h = .1,
and
£ =
.0005. Table 6.9 contains some
of
the results, including the true global
error
and
the true local error, labeled True le. The latter was obtained
by
using
another
more accurate numerical method. Only selected sections
of
output
are shown
because
of
space.
378
NUMERICAL
METHODS FOR ORDINARY
DIFFERENTIAL
EQUATIONS
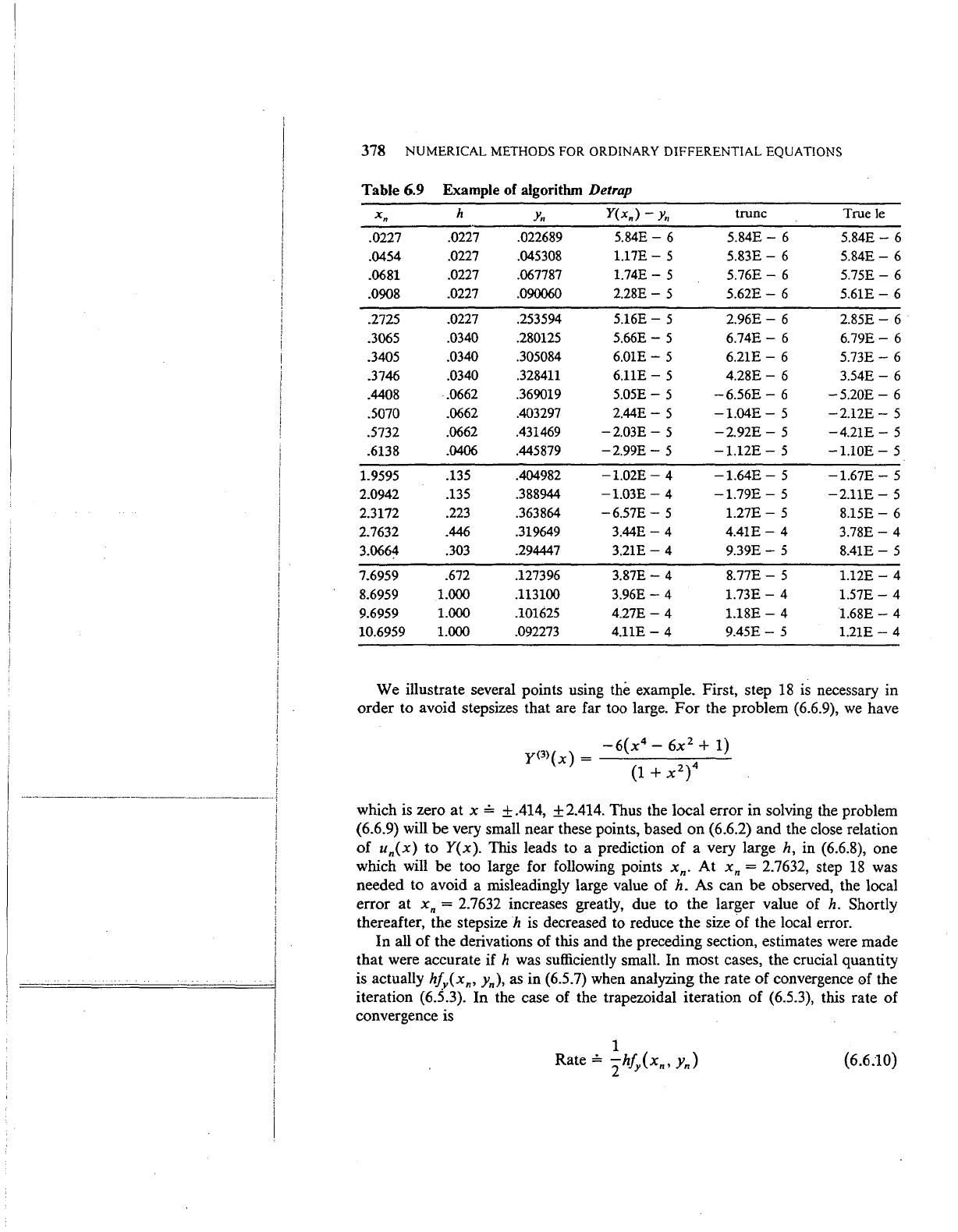
Table 6.9
Example of algorithm Detrap
xn
h
Yn
Y(xn)-
Yn
trunc
True
Je
.0227
.0227 .022689
5.84E-
6
5.84E-
6
5.84E-
6
.0454
.0227
.045308
1.17E-
5
5.83E-
6
5.84E-
6
.0681
.0227 .067787
1.74E-
5
5.76E-
6
5.75E-
6
.0908
.0227 .090060
2.28E-
5
5.62E-
6
5.61E-
6
.2725
.0227 .253594
5.16E-
5
2.96E-
6
2.85E-
6
.3065
.0340
.280125
5.66E-
5
6.74E-
6
6.79E-
6
.3405
.0340 .305084
6.01E-
5
6.21E-
6
5.73E-
6
.3746
.0340 .328411
6.11E-
5
4.28E-
6
3.54E-
6
.4408
·.0662 .369019
5.05E-
5
-6.56E-
6
-5.20E-
6
.5070
.0662 .403297
2.44E-
5
-1.04E-5
-2.12E-
5
.5732
.0662 .431469
-2.03E-
5
-2.92E-
5
-4.21E-
5
.6138
.0406 .445879
-2.99E-
5
-1.12E-
5
-l.lOE-
5
1.9595
.135
.404982
-1.02E-
4
-1.64E-
5
-1.67E-
5
2.0942 .135
.388944
-1.03E-
4
-1.79E-
5
-2.11E-
5
2.3172
.223 .363864
-6.57E-
5
1.27E-
5
8.15E-
6
2.7632
.446 .319649
3.44E-
4
4.41E-
4
3.78E-
4
3.066~
.303 .294447
3.21E-
4
9.39E-
5
8.41E-
5
7.6959 .672 .127396
3.87E-
4
8.77E-
5
1.12E-
4
8.6959
1.000 .113100
3.96E-
4
1.73E-
4
1.57E-
4
9.6959
1.000
.101625
4.27E-
4
1.18E-
4
1.68E-
4
10.6959
1.000 .092273
4.11E-
4
9.45E-
5
1.21E-
4
We illustrate several points using the example. First, step
18
is
necessary in
order to avoid stepsizes that are far too large.
For
the problem (6.6.9),
we
have
which
is
zero
at
x
,;,
± .414, ± 2.414. Thus the local error in solving the problem
(6.6.9) will
be
very small near these points, based
on
(6.6.2) and the close relation
of
un(x)
to
Y(x).
This leads to a prediction of a very large
h,
in (6.6.8), one
which will
be
too large for following points
xn.
At
xn
= 2.7632, step
18
was
needed to avoid a misleadingly large value of
h. As can
be
observed, the local
error at
xn = 2.7632 increases greatly, due to the larger value of
h.
Shortly
thereafter, the stepsize
h
is
decreased to reduce the size of the local error.
In all
of
the derivations of this and the preceding section, estimates were made
that were accurate if
h
was
sufficiently small. In most cases, the crucial quantity
is actually
hfv(xn,
Yn),
as
in (6.5.7) when analyzing the rate of convergence
0f
the
iteration
(6.5.3).
In
the case of the trapezoidal iteration of (6.5.3), this rate of
convergence is
(6.6:10)
A LOW-ORDER PREDICTOR-CORRECTOR ALGORITHM 379
and for the problem (6.6.9), the rate
is
Rate=
-2hyn
If
this
is
near
1,
then
s_everal
iterations are necessary to obtain an accurate
estimate of
Yn+l·
From the table, the rate roughly increases in size
ash
increases.
At
xn = 2.3172, this rate
is
about .162. This still seems small enough, but the
local error
is
more inaccurate than previously, and this may be due· to a less
accurate iterate being obtained
in
(6.5.3). The algorithm can be made more
sophisticated in order to detect the problems
of
too large an
h,
but setting a
reasonably sized
h max
will
also help.
The global error
We
begin by
givi11g
an error bound analogous to the bound
(6.5.18) for a
fixed
stepsize. Write
For the last term,
we
assume the error per unit step criterion (6.6.1)
is
satisfied:
{6.6.12)
For the other term in (6.6.11), introduce the integral equation refqrmulations
Y(x)
=
Y(x,)
+
jxf(t,
Y(t))
dt
x.
un(x) =
Yn
+
jxf(t,
un(t)) dt
x.
Subtract and take bounds using the Lipschitz condition to obtain
I
Y(x)
- u,(x) I
:5
I
e,
I + K(x -
x,)
Max I
Y(t)
-
u,(i)
I
.m::=J::;x
with
en
= Y(xn) -
Yn·
Using this,
we
can derive
Introduce
H = Max
(xn+l-
xn)
=Max
h
x
0
sx.sb
and assume that
HK<l
Combining (6.6.11), (6.6.12),
and
(6.6.14),
we
obtain
1
len+ll
~
1
_ HKlenl +
€H
(6.6.13)
X
2:::
X,
(6.6.14)
i
·-------------------------------------------!
380 NUMERICAL METHODS FOR ORDINARY DIFFERENTIAL EQUATIONS
This is easily solved, much
as
in Theorem 6.3, obtaining
[
ec(h-x
0
)
_
1]
jY(xn)-Ynl~ec<h-xolKjY(xo)-yol+
c.
€
(6.6.15)
for an appropriate constant c >
0.
This
is
the basic error result when using a
variable stepsize, and it is a partial justification
of
the error criterion (6.6.1).
In
some situations,
we
can obtain a more realistic bound.
For
simplicity,
assume
fv(x,
y)
~
0 for all
(x,
y).
Subtracting
in
(6.6.13),
Y(x)-
un(x)
=en+
jx[J(t,
Y(t))-
f(t,
un(t))]
dt
x.
The last step uses the mean-value theorem 1.2, and it can be shown that
Bf(t,
t(t))jBy
is a continuous function of t. This shows that
v(x)
=
Y(x)-
un(x) is a solution of the linear problem
'( )
Bf(x,
~(x))
( )
V X =
By
V X
The solution
of
this linear problem, along with the assumption fv(x,
y)
~
0,.
implies · -
jY(xn+l)-
un(xn+l)
I:::;;
lenl
The condition fy(x,
y)
~
0
is
associated with well-conditioned initial value
problems, as was noted earlier in (6.1.8).
Combining with (6.6.11) and (6.6.12),
we
obtain
jY(xn+l)-
Yn+ll
~jY(xn)-
Ynl
+
€(Xn+l-
xn)
Solving the inequality, we obtain the more realistic bound
(6.6.16)
This partially explains the good behavior of the example in Table 6.9; and even
better theoretical results are possible. But results
(6.6.15) and (6.6.16) are suffi-
cient justification for the use of the test (6.6.1), which controls the error per unit
step.
For
systems of equations y' = f(x,y), the condition fy(x,
y)
~
0 is replaced
by requiring
that
all eigenvalues of the Jacobian matrix fy(x, Y(x)) have real
parts that are zero
or
negative.
The algorithm
Detrap
could be improved
in
a number
of
ways. But it
illustrates the construction of a predictor-corrector algorithm with variable
stepsize.
The
output
is
printed at an inconvenient set
of
node points xn,
but
a
simple interpolation algorithm can take care
of
this. The predictors can
be
improved upon,
but
that too would make the algorithm more complicated.
In
the
next section, we return to a discussion
·of
currently available practical
predictor-corrector algorithms, most of which also vary the order.