Аракелян А.К., Афанасьев А.А. Вентильные электрические машины и регулируемый электропривод. Книга 1
Подождите немного. Документ загружается.

121
Магнитный поток магнитов, пересекающий нижнюю
плоскую поверхность полюсного наконечника длиной
l
2
,
определяется по формуле
м
2
0
2
V V V
H
n
H
a
M
0 2 2
2
1
l M k U a n
r
м
ln . (2.65)
Магнитные потоки торцевого рассеяния, проходящие через
участки поверхности
A A
i j
(
i j
, , ,..., 1 2 12 ) статора или рото-
ра (см. рис. 2.10, а), будут
i j H
i
H
j
i j
V V U a a
,
ln
0 0 м
.
Их удобно выразить в долях рабочего магнитного потока в
воздушном зазоре:
l B l U k
m
1 0 1 м
.
Будем иметь
i j
i j
i j
k l a a
,
,
ln
2 2
1
. (2.66)
Для рассматриваемого макетного образца (
10
3
м ;
k
1 28, ;
l
1
0 16
,
м) значения указанных потоков рассеяния
(в процентах), подсчитанные по формуле (2.66) с использо-
ванием данных табл. 2.3, приведены в табл. 2.4.
Таблица 2.4
Потоки 1 2 3 4 5 6 7
Индексы
i,j
1,2 6,5 8,6 9,8 10,9
11,10
11,6
i j
,
;%
2,12 0,085
2,27
0,457 2,93
3,59 9,24
Номера столбцов в табл. 2.4 соответствуют потокам рассея-
ния, проходящим через: 1 — торцевые поверхности рото-
122
ра; 2 — участки вала; 3 — крышки подшипниковых щитов; 4
— подшипниковые щиты; 5 — станину; 6 — торцевые по-
верхности сердечника статора; 7 — поверхности прищитовых
камер статора (торцы сердечника, станина, щиты и подшип-
никовые крышки).
Видим, что, несмотря на значительное удлинение ротора
l l
2 1
285 160 , суммарная величина торцевых потоков рас-
сеяния не превышает 10% от рабочего потока. Поток рассея-
ния
, ,8 6
, замыкающийся на подшипниковые крышки, мо-
жет концентрироваться в области выступающего прямо-
угольного края (около вершины
A
7
на рис. 2.10, а) и вызы-
вать его нагрев. Поэтому целесообразно эти стальные внут-
ренние подшипниковые крышки заменить на пластмассовые.
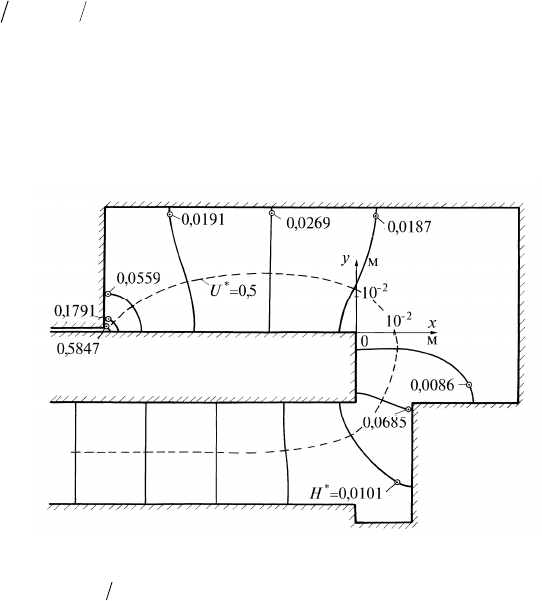
Линии функции потока вектора
Н
и численные значения
этого вектора в некоторых точках, примыкающих к внешнему
периметру торцевой зоны опытного двигателя, рассчитанные по
формулам (2.49), (2.55), (2.59), показаны на рис. 2.11.
Рис. 2.11. Картина вектора напряженности магнитного поля дви-
гателя
H H H
m
1
123
Âыводы.
1. Разработана конструкция двухфазных вентильных дви-
гателей с ферритовыми магнитами на диапазон моментов
47—170 Нм для электропривода механизмов подачи металло-
режущих станков, унифицированная с асинхронными двига-
телями серии 4А, которые превосходят последние по вели-
чине момента в заданном габарите в 1,2...1,3 раза.
2. Предложен метод аналитического решения уравнений
магнитостатики для скалярного потенциала, позволяющий
рассчитать магнитное поле постоянных магнитов как внутри
их объема, в рабочем зазоре СДПМ, так и в торцевых и ло-
бовых зонах сердечников статора и ротора.
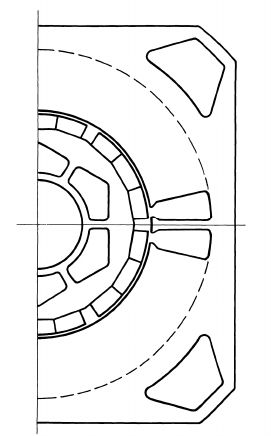
2.5. Магнитоэлектрические неявнополюсные машины
с магнитным слоем на ярме ротора
В электроприводе станков и
робототехнических комплексов
получают распространение маг-
нитоэлектрические вентильные
двигатели (ВД), постоянные маг-
ниты которых (самарий-
кобальтовые, неодим-железо-
боровые и др.) приклеиваются
непосредственно к цилиндриче-
ской или призматической по-
верхности шихтованного ротора.
Малая толщина высокоэрцитив-
ного магнитного слоя, понижен-
ная масса шихтованной части
ротора за счет наличия симмет-
ричных вырубок между ярмом и
ступицей (рис. 2.12) обеспечива-
ют этим ВД более высокие
удельный момент, КПД, показа-
Рис. 2.12. Листы статорного и роторного сердечников бескорпус-
ного двигателя с постоянными магнитами на ярме ротора
124
тели быстродействия, чем у частотно-регулируемого элек-
тропривода аналогичного назначения с асинхронными дви-
гателями. Применение бескорпусной конструкции дает до-
полнительно экономию конструктивных материалов, высо-
кий уровень теплоотдачи и, в некоторых случаях, уменьше-
ние высоты оси вращения. При прямоугольных внешних
очертаниях машины достигается также улучшенная ее
встраиваемость.
Вместе с тем испытания опытных образцов этих двигате-
лей выявили относительно высокий уровень (до 10% от но-
минального) электромагнитного момента при обесточенной
обмотке статора, который проявляется как нежелательный
остаточный выходной сигнал для системы управления ВД,
затрудняющий формирование оптимальных рабочих характе-
ристик электропривода. Повышенное значение остаточного
момента (момента «залипания»), обусловленное высоким
уровнем остаточной индукции используемых магнитов, не-
достаточной однородностью намагничивания элементарных
магнитов, из которых формируется магнитный слой ротора,
и действием ряда других причин, заостряет внимание на реа-
лизации конструктивных мероприятий, обеспечивающих
снижение колебания энергии магнитного поля при повороте
ротора, и на совершенствовании методики электромагнитно-
го расчета двигателя.
2.5.1. Расчет скалярного магнитного потенциала на наружной
поверхности магнитного слоя
Как известно, магнитная индукция внутри объема магни-
та определяется формулой [236]
B M H
0
, (2.67)
где
М
— вектор намагниченности магнитного материала.
Принимая во внимание, что
div
B
0
, из выражения
(2.67) следует скачкообразный характер изменения нормаль-
ных составляющих векторов
М
и
Н
на границе, разделяю-
щей магнитоэлектрическую и воздушную среды. Если точку
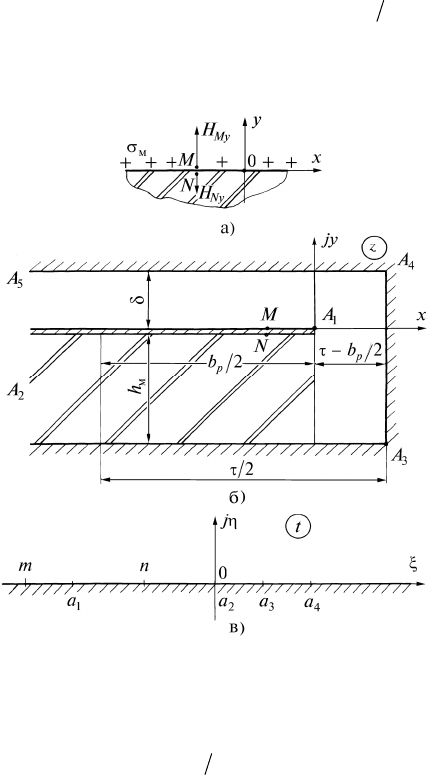
125
N
отнести к магниту, а бесконечно близкую к ней точку
М
-
к воздуху (рис. 2.13, а), то для составляющих векторов, нор-
мальных к границе сред, будет справедливо:
M M H H
Ny My My Ny
M 0
, (2.68)
где
M
— поверхностная плотность магнитных зарядов на
границе двух сред.
Рис. 2.13. Расчет магнитного поля постоянных магнитов
Учитывая, что
M M
M My
0 ,
найдем
M 0
М
Ny
. (2.69)
Таким образом, как следует из формул (2.68), (2.69), ска-
126
чок нормальной составляющей напряженности магнитного
поля МП на поверхности магнита равен нормальной состав-
ляющей вектора намагниченности магнита на его поверхно-
сти. Этот вывод будет положен в основу расчета МП в ак-
тивной зоне магнитоэлектрической машины.
Сведем расчет МП к первой краевой задаче или задаче
Дирихле [192], решаемой средствами теории функций ком-
плексного переменного. Для этого поперечное сечение об-
ласти активного пространства машины, заключенного между
стальными сердечниками статора и ротора и межполюсной
плоскостью (рис. 2.13, б), подвергнем конформному преоб-
разованию, переводя его в верхнюю полуплоскость
t
(рис.2.13,в). При этом на следе наружной поверхности маг-
нитов, обращенной к воздушному зазору, введем бесконечно
тонкий лучевой разрез
А
1
А
5
. На стадии формулирования
принципа решения задачи будем считать поверхность ста-
торного сердечника гладкой, не содержащей пазов.
Соответствие точек верхней полуплоскости
t
и внутри
области линейного, дважды разомкнутого в бесконечности
многоугольника
А
1
А
2
... А
5
плоскости
z
при исходной норми-
ровке постоянных
a
1
10 ;
a
2
0 ;
a
5
задается диффе-
ренциальным уравнением
dz
dt
t
, (2.70)
где
t
t a
t t a t a
1
3 4
. (2.71)
Для вентильного двигателя с
0 75 10
3
, м;
h
M
2 5 10
3
, м;
30 10
3
м;
b
p
24 10
3
м, постоянные
конформного преобразования, рассчитанные численным мето-
дом [52], составили
3
:
a
3
1 5116
,
;
a
4
3 0377
,
.
3
Точность расчета интегралов — 10
—7
; невязка при выходе из ите-
рации — 10
—9
.

127
Допустим распределение скалярного магнитного потен-
циала по поверхности магнитного слоя (по линии
А
1
А
2
на
рис. 2.13,б) задается некоторой неизвестной функцией
U U x
, которую на интервале
b x
4
0 (2.72)
представим косинусоидальным рядом Фурье
U x d d k x b
к
k
p
0
1
2 2cos
. (2.73)
Верхний и нижний берега разреза на отрицательной по-
ловине оси
x
отображаются также на отрицательную полови-
ну оси . Конкретной точке
М
(
N
) на верхнем (нижнем) бе-
регу разреза (рис. 2.13, б) однозначно соответствует точка
m
(
n
) на оси . Положительному обходу берегов разреза в
направлении
А
5
—А
1
—А
2
, при котором отображаемая область
плоскости
z
остается слева, соответствует перемещение по
отрицательной полуоси в положительном направлении. Из
рассмотренного порядка обхода противолежащих точек на
берегах разреза (
M
и
N
) следует неравенство
m a n
1
.
Связь между координатами точек оси
x
и их образов опреде-
ляется дифференциальным уравнением (2.70), из которого
имеем
x t dt x t dt
M
a
m
N
a
n
1 1
. (2.74)
Интегральные равенства (2.74) дают возможность установить
однозначную зависимость
x
, (2.75)
которая для функции
t
вида (2.71) может быть получена в
аналитической форме
128
x
2
3 1 4 1
3 4
ln
a a a a
a a
2
1
3 4
4 1 3 3 1 4
4 3 3 4
1
a
a a
ln
a a a a a a
a a a a
a
. (2.76)
После подстановки (2.75) в (2.73) получаем зависимость
U U
, выражающую распределение скалярного магнитно-
го потенциала по оси плоскости
t
.
U U U
0
, (2.77)
где
U
d
0
0
2
;
U d
k
b
к
p
k
cos
2
1
.
Согласно задаче Дирихле для комплексной полуплоско-
сти существует комплексная потенциальная функция
W t V t jU t
, (2.78)
мнимая часть которой
U t
, являясь скалярным магнитным
потенциалом, принимает на вещественной оси заданное
значение
U
. Эта комплексная потенциальная функция
выражается через интеграл Шварца для полуплоскости [165,
192]:
W t U
t
C d
1 1
, (2.79)
где произвольная функция
C
выбирается из условий уси-
ления сходимости интеграла (2.79). В качестве такой функ-
ции может быть выбрана зависимость сравнительно простого
вида:
129
C
1
2
. (2.80)
Учитывая формулу для комплексно-сопряженного векто-
ра напряженности МП
H
j
dW
dt
dt
dz
j
dW
dt t
1
(2.81)
и зависимости (2.77), (2.79), можем выразить через функцию
U
напряженность МП в точках
М
и
N
, бесконечно близ-
ких к наружной поверхности магнитного слоя (см. рис.
2.13,б):
H
М
j
m
U
m
U
m
d
0
2
0
1
; (2.82)
H
N
j
n
U
n
U
n
d
0
2
0
1
. (2.83)
В частности, если скалярный магнитный потенциал для
всех точек наружной поверхности магнитного слоя принять
одинаковым
U
0 , то формулы (2.82) и (2.83) примут
вид:
H
M
jU m a m a
m a
0 3 4
1
, (2.84)
H
N
jU n a n a
n a
0 3 4
1
. (2.85)
Интегрируя дифференциальное уравнение (2.70) по ок-
ружности бесконечно малого радиуса с центром в точке
t
=
0, можем найти
130
h
t t
t
M
lim
0
, (2.86)
где
h
M
— толщина магнитного слоя (рис. 2.12, б).
Для функции
t
вида (2.71) получим
h
a a a
M
1 3 4
. (2.87)
Анализируя выражения (2.84), (2.85) при
x x
M N
,
когда
m
, а
n
0
, будем иметь с учетом (2.87)
H jU
M
0
;
H jU h
N M
0
. (2.88)
В соответствии с формулами (2.68), (2.69) разность нор-
мальных составляющих напряженности МП в точках
M
и
N
у поверхности магнитов равна нормальной составляющей
намагниченности на этой поверхности
H H j M k H
My Ny r Ny
, (2.89)
где — индекс оси, параллельной направлению магнитной
текстуры;
M
r
— остаточная намагниченность магнитов в направ-
лении оси .
C учетом формул (2.82), (2.83) выражение (2.89) примет
вид:
U
m m
k
n n
0
1
1
1
1
2
0
2
0
m
U d
m
k
n
U d
n
M
r
. (2.90)
Разделим интервал оси
x
b x
p
2 0 на
n
точек:
x
b i
n
i n
i
p
2
1 2, , ,... .