Appel W. Mathematics for Physics and Physicists
Подождите немного. Документ загружается.

Solutions of exercises 567
The expectation for the mass of the first egg is of course 55 g, and the ex pectation for the mass
of the second is 42.5 g. Thus the expectation for the total mass is 97.5 g.
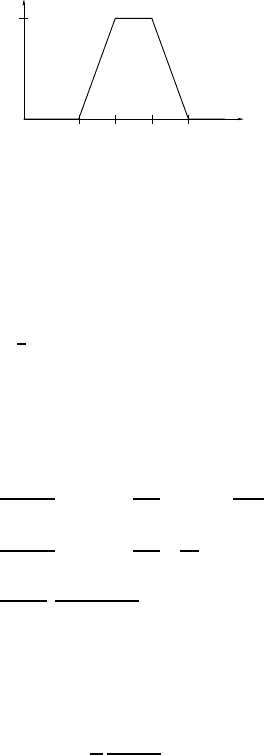
The probability density of the mass of the two eggs togethe r is the convolution
f (x) = f
1
∗ f
2
(x) =
Z
+∞
−∞
f
1
(t) f
2
(x − t) dt,
(because, obviously, we can assume that the two masses are independent), which is the function
with the following graph:
0,1
90 95 100 105
The expectation may also be computed from thi s formula: it is equal to
E =
Z
+∞
0
x f (x) dx = 97.5,
as it should be. The standard deviation satisfies
σ
2
=
Z
+∞
−∞
(x − E)
2
f (x) dx = σ
2
1
+ σ
2
2
.
Since σ
2
1
= 25 /3 and σ
2
2
= 25 /6 by immediate computations, we obtain σ
2
= 25 /2. So the
standard deviation is σ = 5/
p
2. From the graph, the probability that the mass is at least 100
g is 1/4.
Solution of exercise 21.11. Let X
1
and X
2
be two normal c entered random variables, with
variances σ
2
1
and σ
2
2
, respectively. By Proposition 20.67, the probability density of the ratio
X
1
/X
2
is given by
g( y) =
1
2πσ
1
σ
2
Z
exp
−
t
2
2σ
2
1
exp
−
t
2
y
2
2σ
2
2
|t| dt
=
1
2πσ
1
σ
2
Z
exp
−
t
2
2σ
2
2
σ
2
2
σ
2
1
+ y
2
|t| dt
=
1
πσ
1
σ
2
1
σ
2
2
/σ
2
1
+ y
2
,
which is the distribution function of a Cauchy random variable. (To obtain the last line, notice
that the integral to compute is of the type
R
u(t) u
′
(t) dt.)
Solution of exercise 21.15. The characteristic function of a C auchy r.v. is given by
f (u) =
Z
a
π
e
iux
a
2
+ x
2
dx = e
−a|u|
.
Since the characteristic function of the sum of independent random variables is the product
of the characteristic functi o ns of the arguments, we get that the characteristic function of
X
1
+ ···+ X
n
is
exp
(a
1
+ ···+ a
n
) |x|
,
which does not converge pointwise to the characteristic function of a normal random variable.
568 Central limit theorem
Solution of problem 7
i) From the independence of the r.v. X
k
, we deduce that
G
n
=
n
Y
k=1
G
X
k
= (G
X
)
n
.
ii) Using the fact that
P(S = n) =
∞
P
k=0
P(S = n and N = k) =
∞
P
k=0
P(S
k
= n and N = k),
we derive
G
S
(t) =
∞
P
n=0
P(S = n) t
n
=
∞
P
n=0
∞
P
k=0
P(S
k
= n and N = k) t
n
=
∞
P
k=0
∞
P
n=0
P(S
k
= n) ·P(N = k) t
n
=
∞
P
k=0
P(N = k) ·
∞
P
n=0
P(S
k
= n) t
n
| {z }
G
k
(t)
=
∞
P
k=0
P(N = k)
G
k
(t)
n
= G
N
G
X
(t)
.
iii) E(S) = G
′
S
(1) = G
′
N
G
X
(1)
·G
′
X
(1) = E(N) ·E(X ). A n easy computation yields
Var(S) = G
′′
S
(1) + G
′
S
(1) −G
′
S
(1)
2
= E
2
(X ) V (N ) + E(N ) V (X ).
iv) If p
0
= 1, we have G ≡ 1. If p
0
< 1, G is a sum of increasing functions, one of whi ch
at least i s strictly increasing.
v) If p
0
+ p
1
= 1, then G is affine, with G(0) > 0 and G(1) = 1. If p
0
+ p
1
< 1, G is the
sum of convex functions, one of w h ich at least is strictly convex, so it is strictly convex.
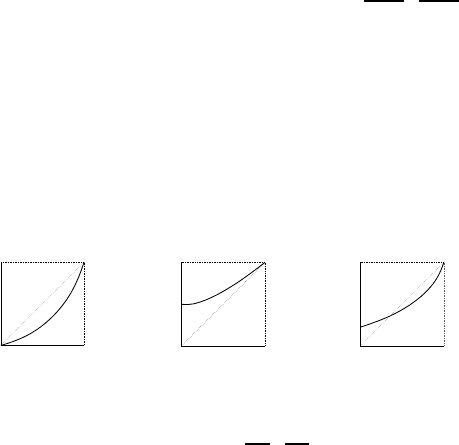
vi) The graph o f G may be of one of the following types:
a) : b) : c) :
The equation G(x) = x has two, one, and two solutions, respectively, in the three cases.
vii) Using question ii), we find th at G
Z
2
= G ◦G and then, by inductio n, that
G
Z
n+1
= G
Z
n
◦G = G ◦··· ◦G
| {z }
n+1 times
.
viii) We have x
n+1
= G ◦G ◦··· ◦G(0) = G(x
n
). In all cases above, there exists an interval
[0, ℓ] on which G(x) ¾ x, and this interval is stable by G, so that the sequence (x
n
)
n∈N
is increasing and bounded from above by ℓ. Hence, it converges.
ix) We h ave E(Z
n+1
) = G
′
Z
n+1
(1) = G
′
Z
n
G(1)
·G
′
(1) = E(Z
n
) · E(Z) since G(1) = 1 and
hence, by induction again, we get E(Z
n
) = E(Z)
n
.
x) (a) There are two cases.
If E(Z) < 1: the curve is as in Figure b) above, which shows that x
n
→ 1: there
is certain extinction, and E(Z
k
) → 0.
If E(Z) = 1 and p
0
> 0: the curve is again of type b), so x
n
→ 1: there is again
certain extinction and of course E(Z
n
) = 1.
Solutions of exercises 569
(b) We assume now that E(Z
1
) > 1. The graph of G is of type c), so that x
n
→ ℓ ∈
]0, 1]. The probability of extinction is not 1 (there is positive probability because
the particles may all disappear during the first steps). Moreover, E(Z
n
) → +∞:
the reaction is explosive.
Solution of problem 8
i) We compute the expectation of X
n
:
E(X
n
) = E
n
X
k=1
cos θ
k
=
n
X
k=1
E(cos θ
k
) =
n
X
k=1
1
2π
Z
2π
0
cos θ dθ = 0 ,
so X
n
is centered, and of course so is Y
n
.
There only remains to compute σ
2
(X
n
) = E(X
2
n
) −E(X
n
)
2
= E(X
2
n
), whic h is given
by
σ
2
(X
n
) = E
(
n
X
k=1
cos θ
k
2
)
= E
n
X
k=1
cos
2
θ
k
+
X
k6=l
cos θ
k
·cos θ
l
!
= n E(cos
2
θ) + n(n −1) E(cos θ
k
·cos θ
l
).
Since the variables θ
k
are independent, we have
E(cos θ
k
·cos θ
l
) = E(cos θ
k
) ·E(cos θ
l
) = 0,
so we obtain finally
σ
2
(X
n
) = n E(cos
2
θ) =
n
2π
Z
2π
0
cos
2
θ dθ =
n
2
.
Similarly, we have σ
2
(Y
n
) = n/2.
ii) To determine whether the variables X
n
and Y
n
are correlated or not, we compute the
covariance. We have
Cov(X
n
, Y
n
) = E
X
n
−E(X
n
)
Y
n
−E(Y
n
)
= E(X
n
· Y
n
)
= E
¨
n
X
k=1
n
X
l=1
cos θ
k
·sin θ
l
«
= n E(cosθ ·sin θ) + n(n −1) E(cos θ · sin θ
′
)
= n E(cosθ ·sin θ) + n(n −1) E(cos θ) E(sin θ
′
) = 0.
Hence X
n
and Y
n
are uncorrelated.
However, they are certainly not independent. For instance, if X
n
= n, we necessari ly
have Y
n
= 0 (Pierre has walked due east during the first n steps), so
P(X
n
= n and Y = 0) = P(X
n
= n) 6= P(X
n
= n) ·P(Y
n
= 0).
iii) The expectation of R
2
n
is
E(R
2
n
) = E(X
2
n
+ Y
2
n
) = E(X
2
n
) + E(Y
2
n
) = n.
So the average of the square of the distance after n steps is n. Of course, one can not
deduce that the average distance is
p
n (which is in fact false).
iv) Since the r.v. cos θ
n
are independent, have zero expectation and finite variance, we may
use the central limit th eorem to deduce th at t he distribution of the r.v. X
n
is c l ose to
570 C en tral limit theo rem
that of a normal centered r.v. with the same variance n/2. The density probability for
such a random variable
˜
X
n
is
f
n
(x) =
1
p
nπ
exp
−
x
2
n
.
Of course, the same is true for Y
n
, which can be approximated by
˜
Y
n
which also has
probability density f
n
.
Since X
n
and Y
n
are uncorrelated, it is natural to assume that
˜
X
n
and
˜
Y
n
are also
uncorrelated, and therefore they are independent, so that the joint probability density
is
f
X
n
,Y
n
(x, y) ≈
1
nπ
exp
−
x
2
+ y
2
n
.
v) The distribution fu nct ion H
n
(r) of t h e r.v. R
n
is given by
H
n
(r) = P(R ¶ r) =
ZZZ
B(0 ; r)
f
X
n
,Y
n
(x, y) dx dy,
where B(0 ; r) is the closed disc of radius r centered at the origin. Using the approxi-
mation above for the density and polar coordinates, we obtain
H
n
(r) ≈
1
nπ
Z
2π
0
Z
r
0
e
−ρ
2
/n
ρ dρ dθ =
2
n
Z
r
0
e
−ρ
2
/n
ρ dρ
=
Z
r
2
0
e
−u/n
du
n
= 1 −e
−r
2
/n
.
The probability density of R
n
is therefore
h
n
(r) = H
′
n
(r) ≈
2 r
n
e
−r
2
/n
.
vi) Finally, the expectation of R
n
is computed by
E(R
n
) =
Z
+∞
0
r h
n
(r) dr ≈
2
n
Z
+∞
0
r
2
e
−r
2
/n
dr =
p
nπ
2
.
Notice that the distance to the origin increases wit h time (rather slowly, compared
with n).
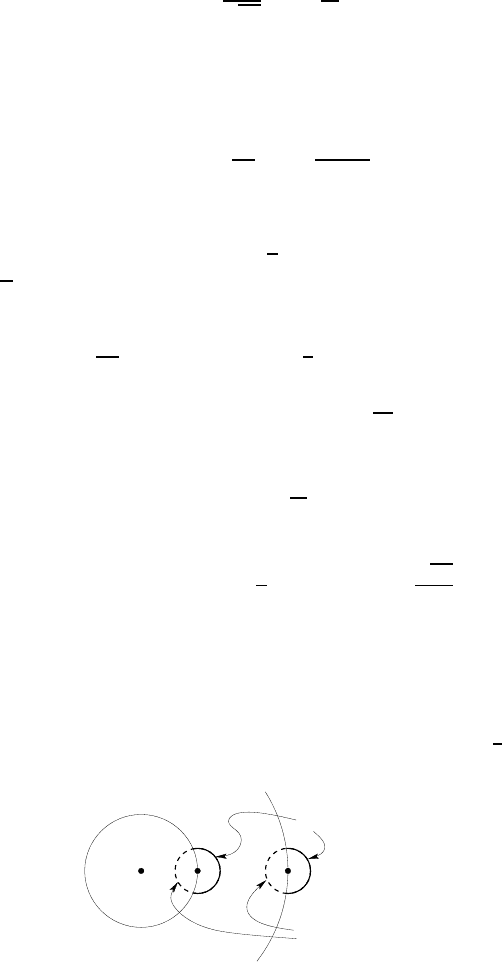
The following heuristic reasoning suggests an explanation: the p robability of getting
farther from the pub is larger than the probability of getting c loser to the pub, as can
be seen in the picture below: t he circular arc describing the values of θ leading to
an increase of the distance is larger than the other (in fact, a simple computation
shows that the difference between the length of the two arcs if of order 1/
p
r, whic h is
consistent with the result obtained).
going farther
going closer
pub
What a beautifu l argument! Unfortu nately, it comes somewhat after the fact, and it
has limits. Indeed, a one-dimensional random walk is also characterized by a distance

Solutions of exercises 571
to the origin E(R
n
) proportional to
p
n, whereas the probability of getting closer is the
same as the probability of going further from the origin.
The conclusion to draw from this tale: beware nice heuristic reasonings; sometimes,
they are but webs of lies and deceit.

Appendix
A
Reminders conc erning
topology and normed
vector spaces
A.1
Topology, topological spaces
Since topology is probably not well known to many physicists, we recall a
few elementary definitions. At the very least, they a re very us eful for stating
precisely properties of continuity and convergence in sets which are more
complicated t han R.
DEFINITION A.1 (Open sets, neighborhoods) Let E be an a rbitrary set. A
topology on E is the data of a set O of subsets of E, called the open subsets
of E (for the given topology), which satisfy the following three properties:
i) ∅ ∈ O and E ∈ O;
ii) for any set I, and any family (A
i
)
i∈I
of open subsets, the union
S
i∈I
A
i
is also an open set (any union of open sets is open);
574 Topology an d normed vector spaces
iii) for any n ∈ N and any fi nite family (A
1
, . . . , A
n
) ∈ O
n
of open sets,
the intersection
T
n
i=1
A
i
∈ O is open (any finite intersection of open sets is
open).
Finally, a neighborhood V of a point a ∈ E is any subset V ⊂ E
containing an open set Ω ⊂ V such that a ∈ Ω.
If a set E is given a topology O, then the pair (E, O), or E itself by abuse
of notation, is called a topological space.
Remark A.2 If E is a metric space, that is, a set on which a distance function is defined, the
distance can be used to define a metric topology, using the open balls defined by the distance. In
partic u l ar this is the case for normed vector spaces, whi ch we will discuss separately below.
Using th e notion of open set, the continuity of a map can be defined.
DEFINITION A.3 (Continuity of a m a p) Let (E, O) and (F , O
′
) be two topo-
logical spaces. A map f : E → F is continuous if, for any open s et Ω ⊂ F ,
the inverse image f
−1
(Ω) =
x ∈ E ; f (x) ∈ Ω
is an open set in E, tha is,
if f
−1
(Ω) ∈ O for any Ω ∈ O
′
.
Remark A.4 This definiti on should be compared with t h at of a measurable map between two
measurable spaces (see Definition 2.21 on page 62).
DEFINITION A.5 (Dense subset) Let (E, O) be a topological s pace. A subset
X ⊂ E is dense in E if, for any a ∈ E and any V which is a neighborhood
of a in E, V meets X , that is, V ∩ X 6= ∅.
DEFINITION A.6 (Connected sets) A topological s pace (E, O) is connected if
it is not the union of two nonempty disjoint open sets: it is not possible to
find A and B such that
X = A ∪ B with A ∈ O, B ∈ O, A 6= ∅, B 6= ∅, A ∩ B = ∅.
A subset X ⊂ E is connected if (X , O
X
) is connected, where the induced
topology O
X
on X is the topology with open sets of the form U = A ∩ X
for some A ∈ O.
In other words, the topological s pace is connected if it is “in one piece.”
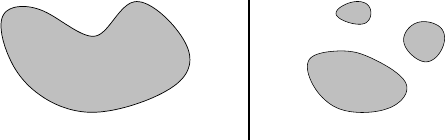
Example A.7 Below are pictures of two sets in th e plane; the set (a) is connected, while (b) is
not.
(a) (b)
Topology, topological spaces 575
Be careful not to mix connected and convex. The first is a purely topological
notion, the second is geometr ic.
DEFINITION A.8 (Convexity) A s ub set X in a vector space or in an affine
space is convex if, for any points A, B in X , the line segment [A, B] is
contained in X . (The segment [A, B] is defined as the set of points λA +
(1 − λ)B, for λ ∈ [0, 1], and this defi nit ion requires a vector space, or affine
space, structure.)
Example A.9 Al l vector space s are convex. Below are examples (in the plane) of a convex set (a)
and a nonconvex set (b); note that both are connected.
(a) (b)
DEFINITION A.10 (Simply connected set) A topological space (E, O) is sim-
ply connected if any closed loop inside E may be deformed continuously to
a t rivial constant loop (i.e., all loops are homotopic to zero).
A subset X ⊂ E is simply connected if the topological space (X , O
X
) is
simply connected.
In the special case E = R
2
(or E = C), a subset X ⊂ R
2
is simply connected
if “there is no hole in X .”
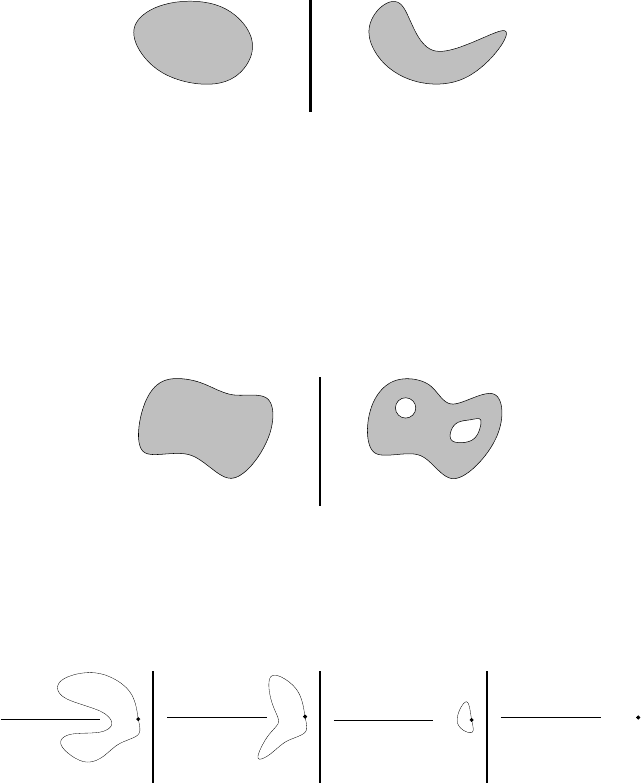
Example A.11 Still in the pl ane, the set in (a) is simply c onnected, wh ereas the set in (b) is not.
Again both are connected.
(a) (b)
Example A.12 Let X be the complex plane minus the origin 0; t h en X is not simply connected.
Indeed, any loop turning once completely around the origin cannot be retracted to a single point
(since 0 is not in X !).
On the other hand, the complex plane minus a half-line, for instance, the half-line of
negative real numbers (i.e., C \R
−
) is simply connected. Below are some illustrations showing
how a certain loop is deformed to a point.
Step 1 Step 2 Step 3 Step 4
576 Topology and normed vector spaces
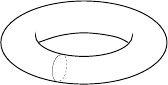
Example A.13 A torus (the surface of a doughnut) is not simply connected. In the picture
below one can see a closed loop which can not be contracted to a single point.
Example A.14 The unit circle U = {z ∈ C ; |z| = 1} in the complex plane is not simply
connected.
An important point is th at connected and simply-connected sets are pre-
served by continuous maps.
THEOREM A.15 The image of a connected set (resp. simply connected set) by a con-
tinuous map is connected (resp. simply connected).
DEFINITION A.16 (Compact sets) An open covering of a topological space
K is any family of open sets (U
i
)
i∈I
such that K is the union of the sets U
i
:
[
i∈I
U
i
= K .
The topological space K is compact if, from every open covering of K ,
one can extract a finite subcovering, i.e., there exist finitely many indices i
1
,. . . ,
i
n
, such that
i
n
[
j=1
U
i
j
= K .
A subset X ⊂ K is compact if it is compact with the induced topology.
The definition of compact spaces by this property is mostly of interest to
mathemat icians . I n metric spaces (in particular, in normed vector spaces), this
property is equivalent with the following: from any sequence (x
n
)
n∈N
with values
in K , one can extract a subsequence that converges in K .
Moreover, in any finite-dimensional normed vector space, compact sets are
exactly those which are closed and bounded (see Theorem A.42).