Zehnder E. Lectures on Dynamical Systems: Hamiltonian Vector Fields and Symplectic Capacities
Подождите немного. Документ загружается.

II.1. Hyperbolic fixed points 51
x
E
C
D T
x
W
C
T
x
W
D E
W
C
.'; x
/
W
.'; x
/
Q
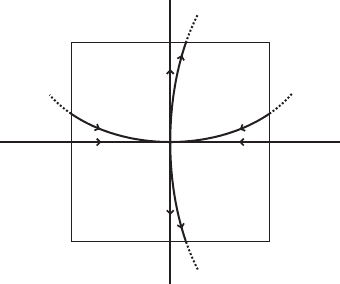
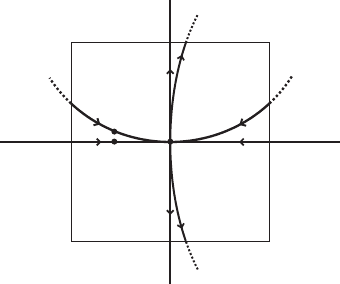
Figure II.3. Hyperbolic fixed point x
with W
C
.'; x
/ and W
.'; x
/ in a neighborhood Q.
These sets contain the fixed point x
and are clearly invariant under the map,
'.W
C
/ D W
C
;
'.W
/ D W
:
Example. If x
D 0 and ' D A 2 L.R
n
/ is a hyperbolic linear isomorphism, then
W
C
.A; 0/ D E
C
;W
.A; 0/ D E
:
This is the dynamical characterization of the spaces E
C
and E
.
In order to study the topological behavior of a diffeomorphism locally near the
hyperbolic fixed point we start with a technical preparation.
Proposition II.2. If X is a Banach space and A 2 L.X; X / a linear isomorphism
and ' W X ! X a map of the form
'.x/ D Ax C g.x/;
where g W X ! X is a Lipschitz-continuous map whose Lipschitz constant " satisfies
"kA
1
k <1;
then the map ' is a homeomorphism of X and the inverse map '
1
is Lipschitz-
continuous.
Proof. (1) We first prove that the map ' is bijective. Let y 2 X . Since A is
bijective, there exists a unique x
0
2 X solving Ax
0
D y and we show that there
52 Chapter II. Invariant manifolds of hyperbolic fixed points
exists a unique solution x 2 X of the equation y D Ax
0
D Ax C g.x/, and hence
solving the equation
x D x
0
A
1
g.x/:
Defining f W X ! X by f.x/ ´ x
0
A
1
g.x/ it follows from the assumptions
of the proposition that
jf.x/ f.y/jDjA
1
g.x/ A
1
g.y/jkA
1
k"jx yj;
so that f is a contraction. The contraction principle guarantees a unique fixed
point x D f.x/ D x
0
A
1
g.x/. This fixed point x is the unique solution of the
equation y D '.x/ and we see that ' is bijective.
(2) Next we shall verify the Lipschitz continuity of the inverse. From jx yjD
jA
1
Ax A
1
Ay jkA
1
kjAx Ay j we conclude
jAx Ay jkA
1
k
1
jx yj;
and so, using the triangle inequality, we can estimate
j'.x/ '.y/jDjAx Ay C g.x/ g.y/j
jAx Ay jjg.x/ g.y/j
.kA
1
k
1
"/jx yj:
Using our assumption "<kA
1
k
1
, one obtains
jx yj
j'.x/ '.y/j
kA
1
k
1
"
and therefore,
j'
1
.u/ '
1
.v/j
ju vj
kA
1
k
1
"
for all u; v 2 X. We see that the inverse map '
1
is Lipschitz-continuous with
Lipschitz constant equal to
L
'
1
D
1
kA
1
k
1
"
D
kA
1
k
1 "kA
1
k
;
and the proposition is proved.
Our next result describes the local behavior of a diffeomorphism ' near a
hyperbolic fixed point. The diffeomorphism behaves in an open neighborhood of
the fixed point topologically like the linearized map at the fixed point.
II.1. Hyperbolic fixed points 53
Theorem II.3 (Hartman–Grobman). Let 0 be a hyperbolic fixed point of the dif-
feomorphism ' W R
n
! R
n
so that
'.x/ D Ax CO'.x/;
O'.x/
jxj
! 0; x ! 0;
with a linear hyperbolic isomorphism A. Then, there exist open neighborhoods U
and V of 0 and a homeomorphism h W U ! V satisfying h.0/ D 0 and
h B '.x/ D A B h.x/
if x 2 U and '.x/ 2 U . Consequently, if defined,
h B '
j
B h
1
.y/ D A
j
y; j 2 Z:
The proof of this local theorem is based on the following global perturbation
theorem of a hyperbolic map A 2 L.R
n
/.
Theorem II.4. Let A 2 L.R
n
/ be a hyperbolic isomorphism and let ', W R
n
!
R
n
be two mappings of the form
'.x/ D Ax CO'.x/; .x/ D Ax C
O
.x/
where the mappings O' and
O
are bounded and Lipschitz-continuous,
jO'j
1
´ sup
x2R
n
jO'.x/j < 1;
jO'.x/ O'.y/j"jx yj for all x; y 2 R
n
;
and the same for the map
O
with the same Lipschitz constant ". Then, if " is
sufficiently small, the maps ' and are homeomorphisms of R
n
and there exists a
unique homeomorphism hW R
n
! R
n
of the form
h.x/ D x C
O
h.x/; j
O
hj
1
< 1
E
E
C
0
0
h
U
V
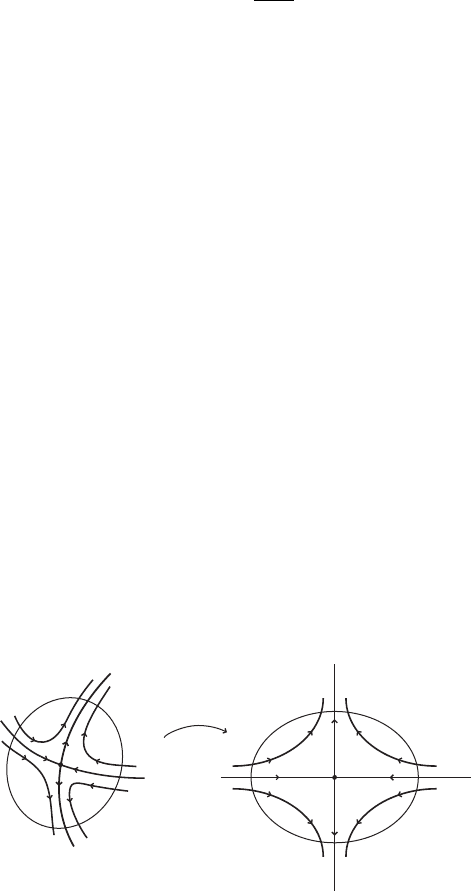
Figure II.4. The theorem by Hartman and Grobman.
54 Chapter II. Invariant manifolds of hyperbolic fixed points
satisfying
' B h.x/ D h B .x/; x 2 R
n
:
Moreover, h.0/ D 0 if we assume, in addition, that '.0/ D 0 D .0/.
Proof [Contraction principle]. According to Proposition II.2, the maps ' and are
homeomorphisms for small ". Moreover, they are Lipschitz-continuous and their
inverse maps are also Lipschitz-continuous.
If ' D A CO' and D A C
O
are the two given maps, we look for a mapping
u D Id COu, which solves the functional equation ' Bu D u B or, more explicitly,
the equivalent equation
A C A Ou CO' B u D A C
O
COu B :
Hence, we first look for a continuous and bounded map OuW R
n
! R
n
that solves
the functional equation
A Ou.x/ Ou. .x// D
O
.x/ O'.u.x//; x 2 R
n
:
We denote by X ´ C
b
.R
n
; R
n
/ the Banach space of continuous and bounded
mappings v W R
n
! R
n
, equipped with the sup-norm
jvj
1
D sup
x2R
n
jv.x/j;
where in R
n
we choose for x D .x
C
;x
/ 2 E
C
˚ E
the maximum norm jxjD
maxfjx
C
j; jx
jg. The norms jx
C
j, jx
j are the adapted norms on E
C
and E
introduced in Proposition II.1.
We now introduce the linear and continuous map L 2 L.X/ as follows:
LW X ! X; v 7! Lv;
.Lv/.x/ ´ Av.x/ v. .x//; x 2 R
n
;
or in short,
Lv D Av v B :
Lemma II.5. If A 2 L.R
n
/ is a hyperbolic isomorphism, then the map L W X ! X
is also a continuous linear isomorphism of the Banach space and so the inverse
map has a finite operator norm kL
1
k < 1.If .0/ D 0, it follows for v 2 X
satisfying v.0/ D 0 that also .L
1
v/.0/ D 0.
Proof [Hyperbolicity of A]. Foragiveng 2 X we look for a solution v 2 X of
the equation
Av v B D g:
According to the splitting R
n
D E
C
˚ E
, we decompose the hyperbolic isomor-
phism A D A
C
˚ A
satisfying, with respect to the adapted norms, the estimates
kA
C
k#; kA
1
k#; 0<#<1:
II.1. Hyperbolic fixed points 55
Decomposing the images, we set
v.x/ D v
C
.x/ ˚ v
.x/;
g.x/ D g
C
.x/ ˚ g
.x/;
for functions v
C
W R
n
! E
C
and v
W R
n
! E
which are elements of the Banach
spaces X
˙
D C
b
.R
n
;E
˙
/. We wish to solve the system of equations
A
C
v
C
v
C
B D g
C
;
A
v
v
B D g
:
Rewriting these equations by composing the first equation from the right with B
1
and applying the linear map A
1
B from the left to the second equation we obtain
the equivalent system
v
C
A
C
v
C
B
1
Dg
C
B
1
;
v
A
1
v
B D A
1
g
:
Introducing the linear operators G
˙
2 L.X
˙
/ by
.G
C
v
C
/.x/ ´ A
C
v
C
.
1
.x//;
.G
v
/.x/ ´ A
1
v
. .x//;
we can rewrite the previous equations in X
˙
as
.1 G
C
/v
C
Dg
C
B
1
;
.1 G
/v
D A
1
g
:
From the hyperbolicity of the isomorphism A we deduce the following estimates
in the sup-norm:
jG
C
v
C
j
1
kA
C
kjv
C
j
1
#jv
C
j
1
;
jG
v
j
1
kA
1
kjv
j
1
#jv
j
1
:
For the operator norms we therefore obtain the estimates kG
k, kG
C
k#<1.
Thus the inverse maps are given by the well-known Neumann series, namely
.1 G
˙
/
1
D
X
j 0
G
j
˙
2 L.X
˙
/:
Therefore the desired unique solution v, given by
v
C
D .1 G
C
/
1
.g
C
.
1
//;
v
D .1 G
/
1
.A
1
g
/;

56 Chapter II. Invariant manifolds of hyperbolic fixed points
satisfies the estimates in the sup-norm:
jv
C
j
1
1
1 #
jg
C
j
1
;
jv
j
1
#
1 #
jg
j
1
1
1 #
jg
j
1
:
We have solved the equation Lv D g in the Banach space X for a unique v. From
jL
1
gj
1
=jgj
1
Djvj
1
=jgj
1
1=.1 #/ for every 0 ¤ g 2 X we conclude
that the operator norm of the inverse map satisfies kL
1
k1=.1 #/ < 1. The
proof of the lemma is complete.
It is instructive to look at the explicit formulas for the inverse maps v
˙
D
L
1
.g
˙
/. They are as follows:
v
C
.x/ D
X
j 0
A
j
C
g
C
.
.j C1/
.x//;
v
.x/ D
X
j 0
A
.j C1/
g
.
j
.x//:
Coming back to the proof of Theorem II.4, we want to solve the functional
equation A Ou.x/ Ou. .x// D
O
.x/ O'.u.x//. The left-hand side of the equation
is equal to L Ou (x), and we have to solve the equation
Ou D L
1
Œ
O
O' B .Id COu/ μ F.Ou/;
where, on the right-hand side, we also have defined the map F W X ! X , which is
a contraction if " is small enough. Indeed,
F.Ou/ F.Ov/ DL
1
ΠO' B .Id COu/ O' B .Id COv/;
and according to the Lipschitz assumption in Theorem II.4,
jO'.x COu.x// O'.x COv.x//j"jOu.x/ Ov.x/j"jOu Ovj
1
;
so that
jO' B .Id COu/ O' B .Id COv/j
1
"jOu Ovj
1
:
Hence, in view of Lemma II.5,
jF.Ou/ F.Ov/j
1
kL
1
k"jOu Ovj
1
< 1
for all Ou, Ov 2 X. Choosing " small enough, the map F W X ! X is a contraction.
Consequently, there exists a unique fixed point
O
h of F , and the map h ´ Id C
O
h
is the unique solution of the functional equation from Theorem II.4 in the class of
the maps hW R
n
! R
n
satisfying h Id 2 X.
II.1. Hyperbolic fixed points 57
It remains to show that h D Id C
O
h is a homeomorphism. We shall conclude
this from the uniqueness of the solution of the functional equation ' B h D h B .
If we exchange ' and , there exists again a unique map g D Id COg satisfying
jOgj
1
< 1 and solving the functional equation B g D g B '. We then get
' B .h B g/ D h B B g;
h B B g D .h B g/ B ';
and therefore, ' B .h B g/ D .h B g/ B '. On the other hand, ' B Id D Id B'. Since
h B g D Id Cw satisfies jwj
1
< 1, it follows from the uniqueness of the solution
of the functional equations in this class that h B g D Id. In exactly the same way,
one sees that also g B h D Id. Since the inverse map h
1
D g is continuous, the
map hW R
n
! R
n
is a homeomorphism. The proof of Theorem II.4 is complete.
Lemma II.6. Let X be a Banach space and B
r
the closed ball in X centered at 0
and of radius r. Then the map f W X ! B
r
defined by
f.x/ D
´
x; jxjr;
r
x
jxj
; jxjr
is Lipschitz-continuous with a Lipschitz constant equal to 2.
Proof. Let x; y 2 X.Forx; y 2 B
r
the statement is obvious. Assuming that
jxj; jyj >rwe estimate, using the triangle inequality,
jf.x/ f.y/jDr
ˇ
ˇ
ˇ
ˇ
x
jxj
y
jyj
ˇ
ˇ
ˇ
ˇ
D
r
jxj
ˇ
ˇ
ˇ
ˇ
x
jxj
jyj
y
ˇ
ˇ
ˇ
ˇ
r
jxj
jx yjC
ˇ
ˇ
ˇ
ˇ
y
jxj
jyj
y
ˇ
ˇ
ˇ
ˇ
D
r
jxj
jx yjC
ˇ
ˇ
ˇ
ˇ
jyjjxj
ˇ
ˇ
ˇ
ˇ
r
jxj
.jx yjCjx yj/
2jx yj:
The remaining cases are verified similarly.
After these preparations, we shall prove the Hartman–Grobman theorem.
Proof of Theorem II.3. We consider the diffeomorphism
'.x/ D Ax CO'.x/
58 Chapter II. Invariant manifolds of hyperbolic fixed points
of Theorem II.3 possessing the origin as a hyperbolic fixed point. Fix ı>0and
let B
r
be the closed ball centered at 0 with radius r. According to the assumption,
O'.0/ D 0 and O'
0
.0/ D 0, where O'
0
denotes the derivative d O'. Since O'
0
is continuous,
we can choose the radius r D r.ı/>0so small that jO'
0
.x/j <ıon B
r
. Then, the
map O' is Lipschitz-continuous on B
r
and has a Lipschitz constant <ı.Wenow
modify the given diffeomorphism outside of B
r
in such a way that the modified
map meets the assumptions of the technical Theorem II.4. For this purpose, we
take the map f introduced in Lemma II.6 and define the map ˆ by
ˆ.x/ ´ Ax C
y
ˆ.x/ ´ Ax CO'.f .x//; x 2 R
n
:
Thus, ˆ D ' on B
r
and
y
ˆ is, according to the above lemma, Lipschitz-continuous
with a Lipschitz constant <2ı. Since O' is bounded on B
r
, we also have j
y
ˆj
1
< 1.
Finally we can apply Theorem II.4 (in this theorem we take A instead of ' and
ˆ instead of ). If ">0is the smallness constant occurring in Theorem II.4,we
choose ı>0so small that 2ı < ". Then Theorem II.4 guarantees a homeomor-
phism h satisfying h.0/ D 0 and solving the functional equation h Bˆ D A Bh.By
choosing U B
r
and introducing V ´ h.U / and restricting h on U , we conclude
that h B' D A Bh on U \ '
1
.U /, as claimed in the theorem. This completes the
proof of the theorem of Hartman–Grobman.
II.2 Local invariant manifolds
Having looked at the behavior of orbits near the unstable fixed point from a topo-
logical point of view, we shall look at it next from a differentiable point of view and
come back to the diffeomorphism ' W R
n
! R
n
of class C
k
, for k 1 possessing
the hyperbolic fixed point 0 D '.0/, so that it is of the form
'.x/ D Ax C g.x/;
where g is a function satisfying g.0/ D 0, g
0
.0/ D 0 and where A 2 L.R
n
/ is the
linearized map having the representation
A D
A
C
0
0A
with respect to E
C
˚ E
D R
n
and satisfying kA
C
k˛ and kA
1
k˛ for a constant 0<˛<1.
Definition. For the neighborhood Q of the fixed point 0, defined by
Q ´fx D .x
C
;x
/ 2 E
C
˚ E
jjx
C
jr; jx
jrg;
r>0, the local invariant manifolds of the fixed point 0 are defined as the sets
W
C
loc
.Q/ ´fx 2 Q j '
j
.x/ 2 Q for all j 0g;
W
loc
.Q/ ´fx 2 Q j '
j
.x/ 2 Q for all j 0g:
II.2. Local invariant manifolds 59
These sets are clearly invariant under ' resp. '
1
,
'.W
C
loc
/ W
C
loc
;'
1
.W
loc
/ W
loc
:
It turns out that these distinguished sets consist of those points in Q which do
converge under the iterates of the map, resp. under the iterates of the inverse map to
the fixed point. Moreover, the sets are embedded manifolds represented by graphs
of differentiable functions.
Theorem II.7 (Hadamard–Perron). We assume that the diffeomorphism ' belongs
to the differentiability class C
k
for some k 1. Then if r>0is sufficiently small,
W
C
loc
.Q/ Dfx 2 Q j '
j
.x/ 2 Q; j 0 and '
j
.x/ ! 0; j !1g
Dfx 2 Q j x D .x
C
; h.x
C
// 2 E
C
˚ E
g;
where h W E
C
! E
is a function of class C
k
satisfying h.0/ D 0 and h
0
.0/ D 0,
so that the tangent space at the point 0 is given by
T
0
W
C
loc
.Q/ D E
C
:
0
x
C
x
x D .x
C
; h.x
C
//
E
C
E
W
C
loc
.Q/
W
loc
.Q/
Q
Figure II.5. The theorem of Hadamard and Perron.
Similarly,
W
loc
.Q/ Dfx 2 Q j '
j
.x/ 2 Q; j 0 and '
j
.x/ ! 0; j !1g
Dfx 2 Q j x D .k.x
/; x
/ 2 E
C
˚ E
g
with a function k W E
! E
C
from C
k
satisfying k.0/ D 0 and k
0
.0/ D 0, so that
T
0
W
loc
.Q/ D E
:
60 Chapter II. Invariant manifolds of hyperbolic fixed points
The theorem of Hadamard–Perron is of local nature but will be deduced from a
global perturbation theorem of the linear map A. To do so we assume, in addition,
that the map '.x/ D Ax C g.x/ satisfies
jgj
1
< 1; jg
0
j
1
ı;
so that g can be considered as a small perturbation of the linear map A 2 L.R
n
/.
The locally stable and unstable manifolds of this map are now defined as the sets
W
C
loc
.R
n
/ Dfx 2 R
n
j sup
j 0
j'
j
.x/j < 1g;
W
loc
.R
n
/ Dfx 2 R
n
j sup
j 0
j'
j
.x/j < 1g:
The sets consist of bounded half orbits of the map ' and we are going to prove that
these half orbits converge under the iterates of the map, resp. under the iterates of
the inverse map to the hyperbolic fixed point. We shall also see that these sets are
embedded submanifolds.
Theorem II.8. Let ' W R
n
! R
n
be a C
k
-diffeomorphism (k 1) possessing the
hyperbolic fixed point x D 0 and let ' be of the form '.x/ D Ax C g.x/ with a
map satisfying g.0/ D 0, jgj
1
< 1 and jg
0
j
1
ı. Then, if ı is small enough,
W
C
loc
.R
n
/ Dfx 2 R
n
j '
j
.x/ ! 0; j !1g
Dfx D .x
C
;x
/ j x
D h.x
C
/g
for a function h W E
C
! E
from C
k
satisfying h.0/ D 0 and h
0
.0/ D 0, so that
T
0
W
C
loc
D E
C
is the tangent space at the fixed point. Similarly,
W
loc
.R
n
/ Dfx 2 R
n
j '
j
.x/ ! 0; j !1g
Dfx D .x
C
;x
/ j x
C
D k.x
/g
for a function k W E
! E
C
from C
k
satisfying k.0/ D 0 and k
0
.0/ D 0 and
T
0
W
loc
D E
:
Proof [Contraction principle, implicit function theorem]. (1)We first show that for
every a D x
C
2 E
C
there exists a unique point x
0
2 R
n
of the form
x
0
D a ˚ h.a/ 2 E
C
˚ E
;
whose orbit converges to the fixed point, i.e., '
j
.x
0
/ ! 0 as j !1.