Zehnder E. Lectures on Dynamical Systems: Hamiltonian Vector Fields and Symplectic Capacities
Подождите немного. Документ загружается.

I.5. Measure preserving maps and the ergodic theorem 41
Then
Z
A
n
fdm 0; for all n 1:
Proof. From the definition of S
C
n
it follows that
f.x/C S
C
n
.T x/ f.x/C S
k
.T x/ D S
kC1
.x/; 0 k n:
If x 2 A
n
, then there exists an integer 1 k n for which S
k
.x/>0. Conse-
quently,
f.x/C S
C
n
.T x/ max
1kn
S
k
.x/ D max
0kn
S
k
.x/ D S
C
n
.x/
and hence f.x/ S
C
n
.x/ S
C
n
.T x/. By using that S
C
n
is equal to zero outside of
A
n
and S
C
n
.T x/ 0 everywhere, we conclude from this inequality and from the
measure preservation of the map T that
Z
A
n
f
Z
A
n
S
C
n
.x/
Z
A
n
S
C
n
.T x/
D
Z
X
S
C
n
.x/
Z
A
n
S
C
n
.T x/
Z
X
S
C
n
.x/
Z
X
S
C
n
.T x/
D
Z
X
S
C
n
.x/
Z
X
S
C
n
.x/
D 0
and the lemma is proved.
(2) For a<bwe define the subset Y of X by
Y D Y.a;b/ D
n
x 2 X j lim
1
n
S
n
.x/<a<b<lim
1
n
S
n
.x/
o
:
Lemma I.23. The set Y is measurable and invariant under the map T , i.e.,
T
1
.Y / D Y .
Proof. The statement Y 2 A follows from elementary measure theory, since the
functions S
n
are all measurable. To prove the invariance, we have to show that
lim
1
n
S
n
.x/ D lim
1
n
S
n
.T x/ and lim
1
n
S
n
.x/ D lim
1
n
S
n
.T x/: However, this fol-
lows immediately from the identity
1
n
S
n
.T x/ D
1
n
S
nC1
.x/
1
n
f.x/ D
1
n C 1
S
nC1
.x/
n C 1
n
„ƒ‚…
!1
1
n
f.x/
„ƒ‚…
!0
by taking the lim respectively lim, and the lemma is proved.
42 Chapter I. Introduction
Lemma I.24. From m.X / < 1 it follows that m.Y / D 0.
Proof. We apply Lemma I.22 to the T -invariant set Y (instead of X) and to the
function g (instead of f ), defined by
g.x/ ´ f.x/ b:
Since m.X / < 1 the function g 2 L.X; A;m/is integrable. Hence, setting
A
n
Dfx 2 Y j S
C
n
.g;x/>0g;
we have
Z
A
n
.f b/ D
Z
Y
A
n
.f b/ 0:
According to the definition of Y there exists for every point x 2 Y an integer j for
which
1
j
S
j
.g; x/ D
1
j
S
j
.f; x/ b>0
and hence S
C
j
.g;x/>0. Consequently every x 2 Y is contained in some set A
j
,so
that Y D
S
n1
A
n
. The monotonicity of the sequence of sets A
n
A
nC1
implies lim
A
n
.x/ D
Y
.x/. Using the convergence theorem of Lebesgue we
obtain in the limit as n !1,
Z
Y
.f b/ 0:
In exactly the same way one proves
R
Y
.a f/ 0. Addition of the inequalities
results in the inequality
.a b/
Z
Y
dm D .a b/m.Y / 0:
Since a<b, one concludes m.Y / D 0 and the lemma is proved.
(3) Pointwise convergence. In view of Lemma I.24 the set
N
0
´
n
x 2 X j lim
1
n
S
n
.x/ < lim
1
n
S
n
.x/
o
;
is the countable union of null sets
N
0
D
[
a<b
a;b2Q
Y.a;b/;
and hence a null set, so that m.N
0
/ D 0: For x … N
0
, hence for almost all x 2 X,
we abbreviate the limit
lim
1
n
S
n
.x/ D lim
1
n
S
n
.x/ D lim
n!1
1
n
S
n
.x/ μ '.x/;
I.5. Measure preserving maps and the ergodic theorem 43
where 1 '.x/ C1: Defining '.x/ D 0 on the null set N
0
we show
next that '.x/ 2 R is a real number almost everywhere. This will follow once
we have proved that ' 2 L.X; A;m/. Since T is measure preserving, we have
R
X
jf.T
j
x/jdm D
R
X
jf jdm for every j 0 and therefore,
Z
X
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.x/
ˇ
ˇ
ˇ
ˇ
dm
Z
X
jf jdm:
Using the Lemma of Fatou we can estimate
Z
X
j'jD
Z
X
lim
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.x/
ˇ
ˇ
ˇ
ˇ
lim
Z
X
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.x/
ˇ
ˇ
ˇ
ˇ
Z
X
jf j < 1:
Hence ' 2 L.X; A;m/and therefore, '.x/ 2 R almost everywhere. The set
N D N
0
[fx 2 X jj'.x/jD1g;
on which lim
n!1
1
n
S
n
.x/ does not exist in R, is therefore a null set. Since the limits
lim
, lim are invariant under T (due to Lemma I.23), the set N is also invariant under
T .Wenowdefine the function f
W X ! R showing up in the statement of the
theorem as follows:
f
.x/ ´
´
lim
n!1
1
n
S
n
.f; x/; x … N;
0; x 2 N:
Then f
2 L.X; A;m/and one sees, as in Lemma I.23, that f
.T x/ D f
.x/ for
all x 2 X. So far, we have proved the statements (i) and (ii) of the ergodic theorem.
(4) It remains to show that
(a)
1
n
S
n
.f; x/ ! f
in L
1
,
(b)
R
X
f
D
R
X
f .
We begin by proving a special case. We assume that f is a bounded function
assuming that jf jK for a constant K>0. Then,
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.x/
ˇ
ˇ
ˇ
ˇ
K;
and the statement (a) follows by means of the dominated convergence theorem of
Lebesgue. Since the map T is measure preserving,
Z
X
1
n
S
n
.x/ D
Z
X
f; n 1;
and the statement (b) follows, again using the convergence theorem of Lebesgue,
Z
X
f D lim
n!1
Z
X
1
n
S
n
.x/ D
Z
X
lim
n!1
1
n
S
n
.x/ D
Z
X
f
:
44 Chapter I. Introduction
(5)We next prove the general case by approximation with the truncated functions
of f 2 L.X; A;m/, defined by
f
N
.x/ D
´
f.x/; jf.x/jN;
0; jf.x/j >N:
Then, jf
N
jN , and in view of the special case we have the pointwise convergence
1
n
S
n
.f
N
;x/ ! f
N
.x/; n !1
almost everywhere and also the convergence in L
1
. Let ">0. By the triangle
inequality one estimates
Z
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.f / f
ˇ
ˇ
ˇ
ˇ
dm
Z
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.f /
1
n
S
n
.f
N
/
ˇ
ˇ
ˇ
ˇ
dm
C
Z
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.f
N
/ f
N
ˇ
ˇ
ˇ
ˇ
dmC
Z
jf
N
f
jdm;
and we are going to estimate each term on the right-hand side by "=3 if N and n
are sufficiently large.
Since f 2 L we have jf j < 1 almost everywhere, and since f
N
.x/ D
f.x/
jf jN
.x/ ! f.x/ we conclude by the convergence theorem of Lebesgue
that
f
N
! f in L
1
:
Therefore, choosing N large enough,
Z
jf
N
f j"=3:
Using that the map T is measure preserving we can now estimate the first term as
follows.
Z
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.f
N
/
1
n
S
n
.f /
ˇ
ˇ
ˇ
ˇ
dm D
Z
1
n
ˇ
ˇ
ˇ
n1
X
j D0
.f
N
f /.T
j
x/
ˇ
ˇ
ˇ
dm
1
n
n1
X
j D0
Z
j.f
N
f /.T
j
x/jdm
D
1
n
n1
X
j D0
Z
j.f
N
f /.x/jdm
D
Z
jf
N
f jdm
"=3:
I.5. Measure preserving maps and the ergodic theorem 45
This holds true for all n and the first term is taken care of. We now apply the Lemma
of Fatou to the first term to obtain as n !1,
Z
jf
N
f
jdm "=3;
which is the desired estimate of the third term. For the second term we conclude
Z
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.f
N
/ f
N
ˇ
ˇ
ˇ
ˇ
dm "=3
for n large enough, from the convergence statement in the special case. Altogether,
Z
ˇ
ˇ
ˇ
ˇ
1
n
S
n
.f / f
ˇ
ˇ
ˇ
ˇ
"
for n large enough. This is true for every ">0. Therefore,
1
n
S
n
.f / ! f
in L
1
and the proof of the statement (a) in the general case is completed. As for the
statement (b) we recall that, because of the measure preservation of the map T ,
Z
1
n
S
n
.f / d m D
Z
f
for all n 1, and using the L
1
-convergence we finally obtain
Z
f D lim
n!1
Z
1
n
S
n
.f / D
Z
f
:
Herewith, the ergodic theorem of Birkhoff is proved.
Literature. There are several monographs on dynamical systems which cover most
of the topics treated in the first four chapters. Among them [49] by B. Hasselblatt
and A. Katok, [113] by W. Szlenk, [63] by R. Mañé and [91] by C. Robinson. The
special topic of ergodic theory is treated, for example, in the monographs [23]by
I. Cornfield, S. V. Fomin and Ya. G. Sinai, [108] and [109] by Ya. G. Sinai, [ 88]by
M. Pollicott, [60] by U. Krengel, [37] H. Fuerstenberg and [115] by P. Walters. For
surveys about specific problems in dynamical systems including historical infor-
mation and many references we recommend the Handbooks of Dynamical Systems
[50] and [35].
Chapter II
Invariant manifolds of hyperbolic fixed points
In this chapter we shall study a diffeomorphism ' W R
n
! R
n
of class C
k
for k 1,
near a fixed point which, by translation, can be assumed to be the origin so that
'.0/ D 0. The orbit through the origin is the set O.0/ Df0g consisting of the
origin. The diffeomorphism ' is of the form
'.x/ D '.0/ C d'.0/x CO'.x/
D d'.0/x CO'.x/
D Ax CO'.x/;
where A 2 L.R
n
/ is a linear isomorphism and where the remainder satisfies
O'.0/ D 0 and d O'.0/ D 0. We shall assume in the following that the fixed point
is hyperbolic. From a dynamical point of view such a fixed point is completely
unstable and we shall first demonstrate that near such a fixed point, the orbits of
the diffeomorphism behave topologically like the orbits of the linearized map at the
fixed point (theorem of Hartman–Grobman). There exist two distinguished sets,
called the stable, respectively the unstable invariant manifold, issuing from the hy-
perbolic fixed point. The stable manifold consists of the set of all points in the space
that under the iterates of the map converge to the fixed point, while the unstable
manifold is the set of points that converge under the iterates of the inverse map to the
fixed point. Considering only those points of these sets that stay under the iterates
of the map, respectively under the iterates of the inverse map in the neighborhood
of the fixed point, we shall show that the stable and unstable invariant manifolds
are, locally near the fixed point, embedded submanifolds represented by graphs
of functions (theorem of Hadamard–Perron). Globally, however, these stable and
unstable invariant manifolds are the images of injective immersions of Euclidean
spaces (theorem of S. Smale) which away from the fixed point can intersect each
other, giving rise to so-called homoclinic points. Homoclinic points considerably
complicate the orbit structure of the diffeomorphism nearby and imply the exis-
tence of orbits with quite unpredictable long-time behavior, as the next chapter
will show.
In the following we shall denote by L.X; Y / the vector space of the linear
and continuous maps between the two normed spaces X and Y and abbreviate
L.X/ D L.X; X/.
II.1. Hyperbolic fixed points 47
II.1 Hyperbolic fixed points
We shall give two equivalent definitions of a hyperbolic fixed point.
Definition. A linear isomorphism A 2 L.R
n
/ of R
n
is called hyperbolic, if it leaves
a splitting
R
n
D E
C
˚ E
invariant so that
A D
A
C
0
0A
with respect to E
C
˚ E
where E
˙
¤f0g and A
C
2 L.E
C
/ and A
2 L.E
/. These linear maps satisfy
the inequalities
jA
j
C
xjc#
j
C
jxj for all j 0; x 2 E
C
;
jA
j
xjc#
j
jxj for all j 0; x 2 E
;
with a constant c 0 and with constants
0<#
C
<1;
0<#
<1:
The fixed point 0 of the above diffeomorphism ' W R
n
! R
n
is called hyperbolic
if the linearization of the diffeomorphism at the fixed point A ´ d'.0/ 2 L.R
n
/
is a hyperbolic isomorphism.
It is easily verified that the dynamical behavior of the hyperbolic map A char-
acterizes the spaces E
C
and E
as follows:
E
C
Dfx 2 R
n
j A
j
x ! 0; j ! C1g
Dfx 2 R
n
j sup
j 0
jA
j
xj < 1g;
E
Dfx 2 R
n
j A
j
x ! 0; j ! 1g
Dfx 2 R
n
j sup
j 0
jA
j
xj < 1g:
We shall use the following notation with respect to the splitting R
n
D E
C
˚E
:
x D .x
C
;x
/ D x
C
˚ x
;
Ax D .A
C
x
C
;A
x
/ D A
C
x
C
˚ A
x
:
An alternative definition of the hyperbolicity of an isomorphism A in terms of
its spectrum .A/ consisting of the set of eigenvalues of A is the following.

48 Chapter II. Invariant manifolds of hyperbolic fixed points
Definition. An isomorphism A 2 L.R
n
/ is called hyperbolic if its spectrum has
the properties
jj¤1; 2 .A/;
and there exist points in the spectrum satisfying jj <1and also points satisfying
jj >1.
S
1
1
C
Figure II.1. Spectrum of a hyperbolic isomorphism.
The two definitions of a hyperbolic linear isomorphism are equivalent. Indeed, if
A is hyperbolic according to the second definition, we denote by E
C
the generalized
eigenspace of all eigenvalues satisfying jj <1and by E
the generalized
eigenspace of all eigenvalues with jj >1and obtain the invariant splitting R
n
D
E
C
˚ E
.
The restricted maps A
C
D Aj
E
C
W E
C
! E
C
(and analogously for A
)have
the spectra
.A
C
/ D .A/ \fjzj <1g;
.A
/ D .A/ \fjzj >1g:
In order to verify the desired estimates for jA
j
C
xj and jA
j
xj on E
C
and E
we recall that the spectral radius r
A
C
´ maxfjjj 2 .A
C
/g of A
C
satisfies
lim
j !1
kA
j
C
k
1
j
D r
A
C
<1;
where kkdenotes the operator norm. Therefore, we find an integer j
0
such that
for all j j
0
the estimates kA
j
C
k
1
j
# hold true for a constant #<1and the
inequalities jA
j
C
xj#
j
jxj follow from the definition of the operator norm. To
ensure the desired estimate also for the finitely many j<j
0
, one simply puts a
sufficiently large constant c in front of the previous estimates on the right-hand side.
The estimates for jA
j
xj follow by the same argument applied to the linear map
A
1
. Therefore, the two definitions of hyperbolicity are equivalent.
II.1. Hyperbolic fixed points 49
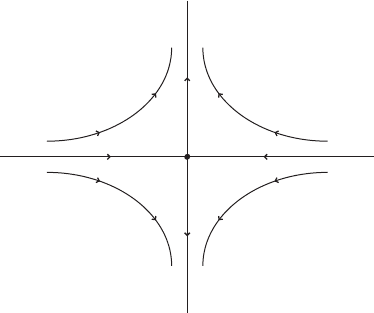
Example. The linear map A 2 L.R
2
/, in the canonical basis fe
1
;e
2
g represented
by the matrix
A D
0
0
; 0<<1<;
has the spectrum .A/ Df; g. Moreover, E
C
D R f0g and E
Df0gR.
The orbits are sketched in Figure II.2.
E
E
C
0
Figure II.2. Schematic representation of the orbits of A 2 L.R
2
/ in the example.
It is convenient for the arguments later on to introduce new and equivalent norms
with respect to which the constant c in the definition of the hyperbolicity is equal
to 1.
Proposition II.1 (Adapted norms). Assume that the map A 2 L.R
n
/ is hyperbolic.
Then, there exist equivalent norms jj
on E
C
and E
such that
jA
C
xj
˛jxj
;x2 E
C
;
jA
1
xj
ˇjxj
;x2 E
;
with constants #
C
<˛<1and #
<ˇ<1.
With respect to these norms the linear maps A
C
and A
1
are contractions, so
that kA
C
k
<1and kA
1
k
<1.
Proof. In order to construct the new norm in the space E
C
we choose #
C
<˛<1
and then choose the integer N so large that
c.#
C
=˛/
N
1:
50 Chapter II. Invariant manifolds of hyperbolic fixed points
For x 2 E
C
we define the new norm on E
C
by
jxj
´
N 1
X
j D0
˛
j
jA
j
C
xj:
It satisfies
jxjjxj
C jxj
with the constant C D cN, so that the two norms are equivalent. It remains to
verify that A
C
is a contraction satisfying kA
C
k
˛<1. To see this, we estimate
jA
C
xj
D
N 1
X
j D0
˛
j
jA
j C1
C
xj
D ˛
N 1
X
j D1
˛
j
jA
j
C
xjC˛
N
jA
N
C
xj
˛
N 1
X
j D1
˛
j
jA
j
C
xjCjxj
D ˛
N 1
X
j D0
˛
j
jA
j
C
xj
D ˛jxj
;
where we have used, in view of our choice of the integer N , that
˛
N
jA
N
C
xjc˛
N
#
N
C
jxjjxj:
On the subspace E
one carries out the same construction taking A
1
instead
of A
C
. The proposition is proved.
As already mentioned at the beginning of the chapter, a hyperbolic fixed point
gives rise to the so-called stable manifold and the unstable manifold. The stable
manifold consists of all the points in the space that converge under the iterates of
the map to the fixed point, while the unstable manifold consists of all those points
that converge to the fixed point under the iterates of the inverse map.
Definition. The stable, respectively unstable, invariant manifold of a hyperbolic
fixed point x
of the diffeomorphism ' are the sets
W
C
.'; x
/ ´fx 2 R
n
j '
j
.x/ ! x
;j!1g;
W
.'; x
/ ´fx 2 R
n
j '
j
.x/ ! x
;j!1g: