Юрганов А.А., Кожевников В.А. Регулирование возбуждения синхронных генераторов
Подождите немного. Документ загружается.

Таким образом, при реальных значениях коэффициента К
0u
область
апериодической устойчивости при перевозбуждении (Q > 0)
ограничена справа режимами, в которых угол между Е
р
и U
c
достигает
90°. При реальных значениях 0.2 ≤ Х
вн
≤ 0.5 о. е. это ограничение
лежит намного правее области допустимых режимов и его можно не
учитывать. В режимах потребления реактивной мощности (Q < 0)
апериодическая устойчивость нарушается при превышении
внутренним углом между Е
р
и U
г
значения 90°. Эта левая граница
существенно ограничивает область устойчивых рабочих режимов.
Однако при конечных значениях K
0u
устойчивы режимы, лежащие
левее прямой I
r
=-U
г
/X
d
, которую до сих пор всегда считали пределом
апериодической устойчивости синхронной машины обычного
исполнения в режимах потребления [9 ]. Расширение области тем
больше, чем меньше величина К
0u
. Поэтому с точки зрения апе-
риодической устойчивости целесообразно снижение этого коэффи-
циента.
3.1.2. Границы электромеханической
колебательной устойчивости
Выражение для максимально допустимого по условиям ус-
тойчивости низкочастотного внешнего электромеханического движе-
ния коэффициента усиления по напряжению
накладывает дополнительные ограничения на область допустимых
режимов. Оно было получено при допущении о безынерционности
каналов регулирования регулятора.
Рассмотрим сначала случай регулирования только по отклонению
напряжения и его производной (K
1if
= K
f
= 0).
После ряда преобразований (3.16) приводится к виду
где
математически описывающему кривую, получившую название
«улитки» [35 ]. После замены переменных I
r
+U
г
/X
d
=X интересующее
нас решение уравнения 4-й степени получим в виде
51
Знак «плюс» соответствует генераторному режиму, знак «минус»
— двигательному.
* Для гидрогенератора выражение (3.16) имеет вид:
Нетрудно заметить, что при X
q
= X
d
(турбогенератор) оно полностью совпадает с
(3.16).
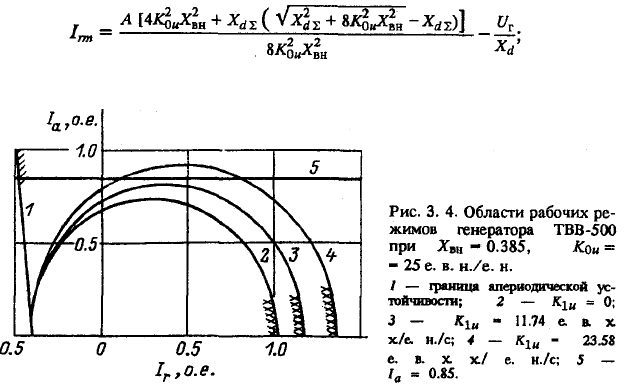
На рис. 3.4 приведены границы колебательной устойчивости при
К
0u
= 25 e.в.н./е.н. для трех различных значений K
1u
, а на рис. 3.5 — то
же при К
0u
= 5 е.в.н./е.н. Видно, что все они пересекают ось абсцисс
слева в точке I
rл
=-U
г
/X
d
, а правая точка пересечения I
rп
, зависит от
величины коэффициентов К
0u
и К
1u
:
При К
ou
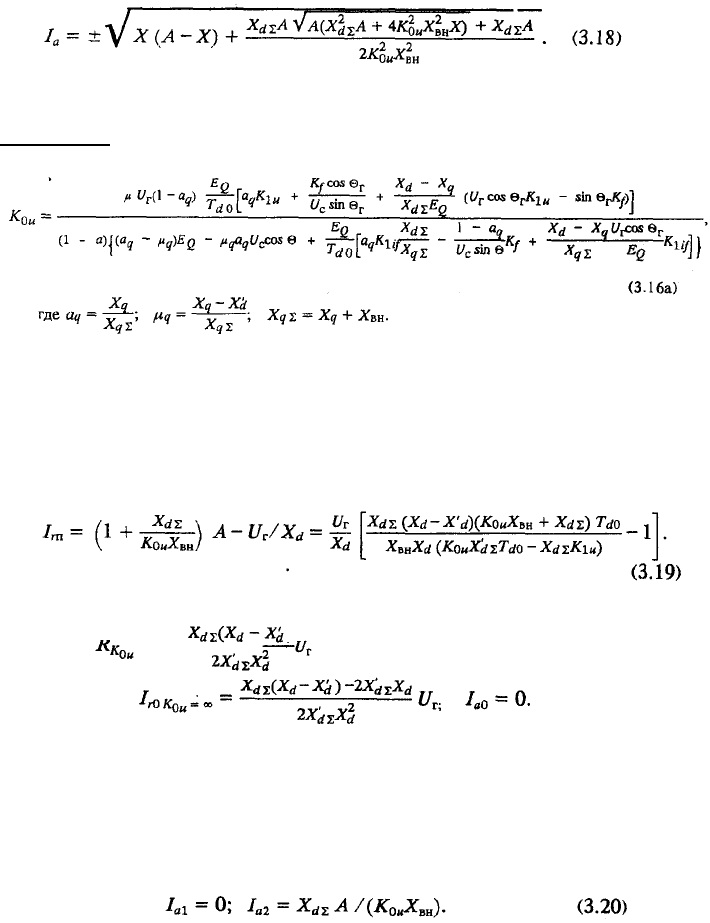
→∞ уравнение границы вырождается в окружность (3.8)
радиуса с центром в точке
Построение границы колебательной устойчивости по уравнению
(3.18) требует применения вычислительной техники и специализи-
рованных программ. Поэтому для инженеров, не располагающих ими,
можно предложить предельно простой способ построения границы по
четырем точкам.
Из (3.17) следует, что значению Х = 0 (I
r
=-U
г
/X
d
) соответствуют
два значения активного тока:
При I
a3
=
0 определяется третья точка (3.19). Четвертую точку
(экстремум) кривой найдем, взяв частную производную выражения
(3.18) по реактивному току
r
I/
a
I
и приравняв ее нулю:
52
53

Нанеся эти четыре точки на диаграмму рабочих режимов и сое-
динив их между собой плавной выпуклой кривой, можно довольно
точно построить границу колебательной устойчивости для простей-
шего закона регулирования возбуждения.
3.1.3. Рекомендации по применению
Полученные выше соотношения дают возможность без
применения специализированных программ нанести на диаграмму
режимов синхронной машины границы апериодической и колеба-
тельной статической устойчивости при регулировании возбуждения
по отклонений и по первой производной напряжения генератора. Ис-
ходными данными служат параметры исследуемого генератора или
эквивалентного генератора станции и значение Х
вн
. Порядок расчетов
следующий:
1. Выбираются предполагаемые значения коэффициентов усиления
K
0u
[е.в.х.х./е.н. ] и K
1u
[е.в.х.х./е.н./с].
2. Строится диаграмма допустимых режимов в координатах
I
a
- I
r
.
3. Выбираются предполагаемые значения уровней напряжения по
концам эквивалентной электропередачи.
4 А. А. Юрганов, В. А. Кожевников
54
55

4. Сравнивается выбранное значение К
0u
с величиной X
d
/
X
вн
;
при К
0u
> X
d
/X
вн
(наиболее часто встречающийся случай)
наносятся на диаграмму границы «справа» по уравнению (3.6) и
«слева» — по уравнению (3.15).
5. Строится по уравнению (3.18) граница колебательной устой-
чивости. Если выполнить полный объем вычислений затруднительно,
то ее построение выполняется приближенно по четырем точкам (3.19)
—(3.21).
В результате получим область рабочих режимов, представляющую
собой внутреннюю часть построенных областей. Анализируя ее (рис.
3.4 и 3.5), можно решить, справится ли пропорциональный регулятор
со стабилизацией всех возможных режимов, следует ли уменьшать
коэффициент усиления по напряжению или предусмотреть сильное
регулирование возбуждения. При этом нужно иметь в виду, что для
обеспечения приличного качества регулирования необходимо иметь
запас устойчивости в каждом из режимов.
Все эти задачи, а также задачу выбора коэффициента K
f
, обес-
печивающего требуемое значение К
0u
max, можно решать в полуавто-
матическом режиме с помощью ППП «Модель».
3.2. Статическая устойчивость
при включенных каналах стабилизации
Ранее мы получили границы статической устойчивости при
регулировании по отклонению и производной напряжения.
Реализуемый в российских регуляторах закон регулирования (1.19)
включает в себя дополнительно к отклонению и производной
напряжения сигналы стабилизации по производной тока возбуждения,
а также по отклонению и первой производной частоты напряжения
генератора. В разд. 2.3 было показано, что безынерционный сигнал I'
f
отрицательно сказывается на устойчивости и в реальных регуляторах
вводится его запаздывание. Положим, что W
1if
=1/(1+рτ), τ =0.15с.
Совместное действие каналов стабилизации «по частоте» по-
прежнему будем учитывать безынерционным сигналом Δf
u
, вводимым
с эквивалентным коэффициентом K
f
= 0.5K
0f
[е.в.х.х./рад/с ] (К
0f
[дел] =
К
1f
[дел]).
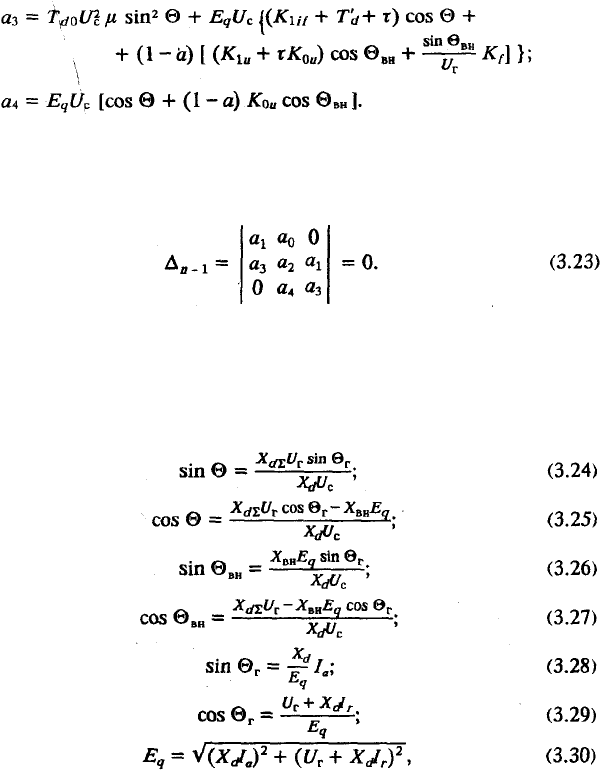
В этом случае порядок характеристического уравнения повыша-
ется и его коэффициенты имеют вид:
56

57
На апериодическую устойчивость каналы производных не влияют.
Ее границы по-прежнему определяются выражениями (3.6), (3.15).
Границу колебательной устойчивости получим, приравняв нулю
предпоследний определитель системы
Аналитическое решение этого уравнения очень громоздко. Поэ-
тому остается только одна возможность: решить его численным ме-
тодом.
Воспользовавшись вытекающими из уравнений установившегося
режима выражениями:
исключим из (3.23) все переменные, кроме активного и
реактивного токов, и получим полное уравнение 9-й степени
относительно I
a
и I
r
. Подставив в него параметры электропередачи и
величину напряжения генератора, решим любым численным методом,
например методом Ньютона, и получим для выбранного числа точек
границу в виде зависимости I
a
(I
r
). Останется только нанести ее на
область допустимых режимов.
На рис. 3.6—3.8 показано для выбранного расчетного примера, как
влияют сигналы стабилизации по производной тока ротора и частоте
напряжения на области колебательной устойчивости при разной
величине коэффициента усиления по напряжению.
58
4*
59
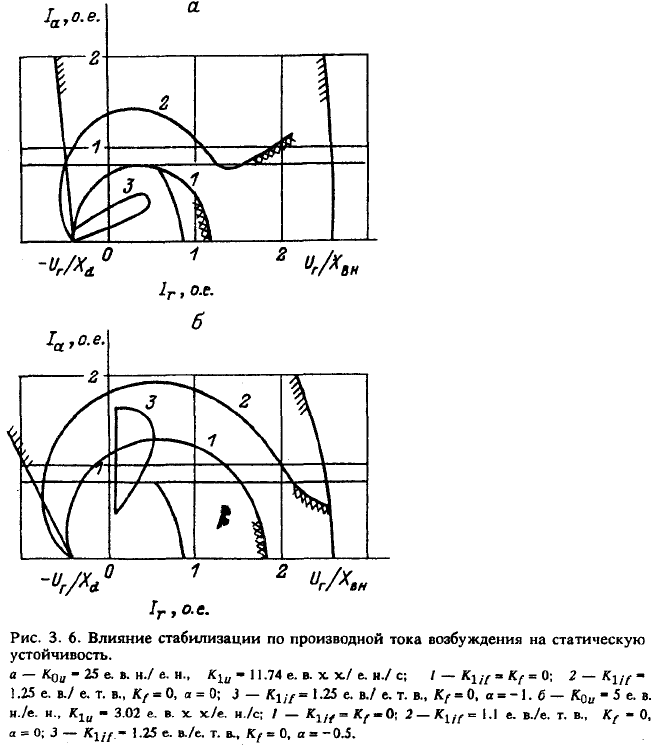
Видно, что стабилизация только «по частоте» расширяет область
устойчивости в режимах перевозбуждения и практически не помогает
в режимах потребления реактивной мощности. Сигнал I'
f
, наоборот,
помогает в режимах потребления, а в режимах выдачи Q его
эффективность падает. Совместное действие всех каналов стабили-
зации позволяет получить практически одинаковый запас устойчи-
вости в режимах Р = P
ном
, Q = var.
До сих пор мы рассматривали границы устойчивости, то есть ли-
нии нулевого затухания. Однако существует возможность нанести на
область допустимых режимов и линии равного затухания, соответст-
вующие определенной величине вещественной части самой правой
пары комплексных корней системы.