Yi Lin. General Systems Theory: A Mathematical Approach
Подождите немного. Документ загружается.

132
Chapter 6
and let
(6.12)
If the real-valued
function f
(0)
is Lebesgue integrable on
then
–
H
(0)
has
Lebesgue measure zero, denoted
Step n: Assume the real numbers
have all been defined.
For fixed
define a subset H
(n
)
⊆
as follows: x
n
∈
H
(n
)
iff
y
–m
= 0 if m > n and y
–n
= y
–n
(x
n
) a function of x
n
(6.13)
and let
(6.14)
If the real-valued function
is Lebesgue integrable on denote the
integral on
by
is meaningful
— that is, if there are only up to countably many nonzero summands and the
summation is absolutely convergent—then the sum is denoted a
(n
)
.
Definition 6.5.1
[Wang (1985)].
If
function
f
(
is convergent and equals
a
, then the
x
) is GNL-integrable and we write
Case 2: Partition the set E as follows:
where
E
k
= {x ∈ GNS : k(
x
) = – k}. Consider the right-shifting of
, and the left-shifting of f(
x
):
Using the method developed in Case 1, denote
Definition 6.5.2 [Wang (1985)]. If
∑
k
a
k
is convergent, then the function f(
x
) is
GNL-integrable and we write
A Mathematics of Computability that Speaks the Language of Levels
133
We are now ready to look at Dirac’s δ function. Let ƒ:
be infinitely
differentiable and define
f : GNS
→
GNS
as follows:
This function is called the GNS function induced by ƒ(
x
). Then it can be shown
that 6.5.1 holds.
Theorem 6.5.1 [Wang (1985)]. Let ƒ and f be defined as before. Then there is a
GNL
-integrable function
g:
GNS → GNS such that
In particular, let
g:
be arbitrary and infinitely differentiable with bounded
support: that is,
Sup(
g) = {x ∈
g
(
x
)
≠ 0
}
is bounded in
and
g
(
x
)
dx
=
1.
Then the
GNL
-integrable function
g:
GNS → GNS can be defined
1
,
x
2
,...)
otherwise
if x = (... ,
0,
x
That is, g
(
x
) is a Dirac δ function according to Eq. (6.2).
Proof: Pick a real-valued function g: such that g is infinitely differ-
entiable with bounded support and satisfies
Define
for x
= ( . . . , 0,
x
1
,
x
2
, ...)
otherwise
Then
for x = (..., 0, x
1
,
x
2
, ...)
otherwise
134
Chapter 6
Since
(f)(x
)
g
(
x
))
– n
= 0, for each n = 0,1,2, ..., and g(
t
)
dt = 1, it follows
that
This
completes
the proof.
For a more rigorous treatment of GNS, please refer to Chapter 11
6.6. Some Final Words
If the ordered field GNS is substituted for we can see that the theory and
applications of GNS will have a great future, since has been applied in almost
all areas of human knowledge and been challenged numerous times. As shown
in (Wang, 1985; Wang, 1991), many studies can be carried out along the lines
of classical research, such as mathematical analysis, distribution theory, quantum
mechanics, etc., on GNS. Not only this, we also expect that when one is studying
topics from various disciplines with GNS, some open problems in relevant fields
might be answered, and some new fields of research might be opened up. Most
importantly, we hope that the study of GNS will furnish a convenient tool for a
computational general systems theory.
CHAPTER 7
Bellman’s Principle of Optimality and
Its Generalizations
In dynamic programming Bellman’s principle of optimality is extremely important.
The principle says (Bellman, 1957) that each subpolicy of an optimum policy must
itself be an optimum policy with regard to the initial and the terminal states of the
subpolicy. Here, the terms “policy,” “subpolicy,” “optimum policy,” and “state”
are are primitive and are not given specific meanings. In each application, these
terms are understood in certain ways comparable to the situation of interest. For
example, in a weighted graph, an optimum path from a vertex v
1
to vertex v
2
is
the one with the smallest sum of weights of the edges along the path. In this case,
a “policy” means a path, a “subpolicy” a subpath, an “optimum policy” stands
for a path with the smallest weight, and “the initial and terminal states” for the
beginning and ending vertices v
1
and v
2
,
respectively. The principle implies that
for each chosen optimum path from v
1
to v
2
,
each subpath must be an optimum
path connecting the initial and terminal vertices of the subpath.
7.1. A Brief Historical Note
During the last half century or so, Bellman’s principle has become the cor-
nerstone in the study of the shortest-path problem, inventory problem, traveling-
salesman problem, equipment-replacement models, the resource allocation prob-
lems, etc. For details see Dreyfus and Law (1977). However, since the early
1970s, a number of practical optimization problems have been put forward in
management science, economics, and many other fields. One feature common
to all these problems is that the performance criteria are not real numbers, and
consequently, the optimum options are no longer maxima or minima of some
set of real numbers. Many dynamic programming models with nonscalar-valued
performance criteria have been established. See (Bellman and Zadeh, 1970; Mit-
ten, 1974; Wu, 1980; Wu, 1981a; Furukawa, 1980; Henig, 1983; Baldwin and
Pilsworth, 1982).
135
136
Chapter 7
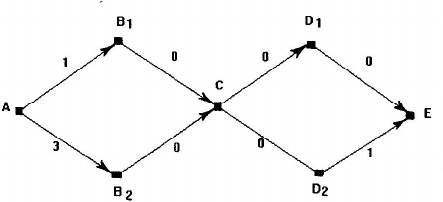
Figure 7.1. A subpolicy of the optimum policy is no longer optimum.
Since the application of Bellman’s principle is no longer restricted to classical
cases, scholars began to question how far the validity of the principle can be
carried. Hu (1982) constructed an example to show that the principle does not
hold in general. In fact, it was shown by Qin (1991), that if the goal set is strong
antisymmetric, then the sum of local optimization orders is less than or equal to
the global optimization order. Therefore, the following natural question arises.
Question 7.1.1 [Hu (1982)]. Under what characterizations can a given problem
be solved by dynamic programming?
At the same time, as many scholars have realized, it is the fundamental equation
approach, not the principle of optimality, that makes up the theoretical foundation
of dynamic programming. The optimum principle gives one a property of the
optimum policy, while the fundamental equation approach offers one an effective
method to obtain the desired optimal policy. Since the validity of Bellman’s
principle is limited, is the fundamental equation approach also limited? Again,
Hu’s counterexample shows that the fundamental equation approach does not
always work. Thus, the following questions are natural:
Question 7.1.2 [Wu and Wu (1986)]. In what range does the fundamental equa-
tion approach hold? How can its validity be proved? What relations are there,
if any, between the fundamental equation approach and Bellman’s Principle of
Optimality?
To seek the answer to these questions, several approaches of systems analysis
presented.
are
7.2. Hu’s Counterexample and Analysis
Let us first look at Hu’s counterexample.
Bellman’s Principle of Optimality and Its Generalizations
137
Example 7.2.1. Consider the network in Fig. 7.1. Define an optimum path as
one where the sum of all arc lengths (mod4) is the minimum. Then the policy
A
→ B
2
→
C
→
D
2
→
E
is optimum, but its subpolicy
B
2
→ C →
D
2
→ E is not
optimum, since B
2 → C →
D
1
→
E
is, which has weight 0.
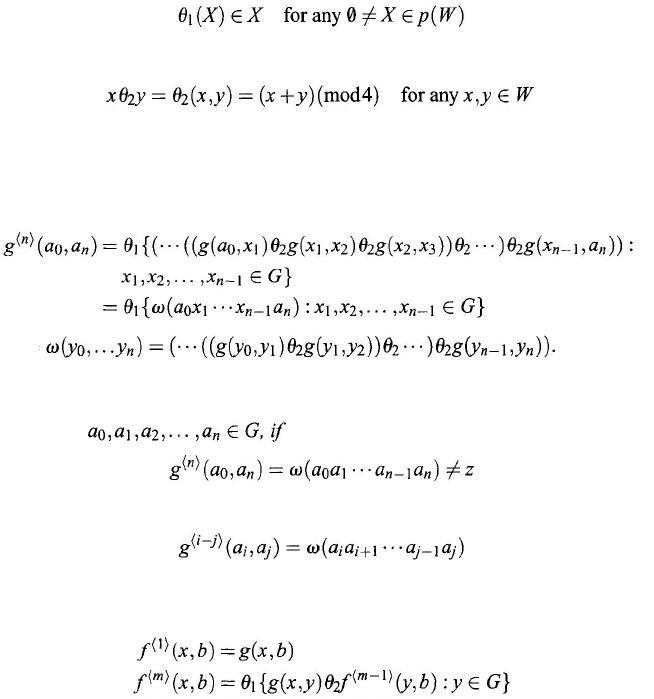
Now let W ={0,1,2,3 ,...
} be the set of all possible weights,
θ
1
= minimum:
p
(
W) → W be the optimum option, which is a mapping from the power set p(W
)
of W, the set of all subsets of W, into W such that
(7.1)
and let
θ
2
= {+}
°
(mod4) :
W
² → W be the binary relation on W such that
(7.2)
where
°
stands for the ordinary composition of mappings.
If G is a nonempty set, representing the set of all vertices, then each network
or graph or weighted graph is simply an element g
∈
W
↑
G
,
²
where W ↑ G² is
the set of all mappings from G² =
G
× G into W. For any
a
0
,
a
n
∈
G,
define
where
Then Bellman’s principle of optimality can be written as follows.
Theorem 7.2.1 [Bellman’s Principle of Optimality].
For any natural number
n, elements
(7.3)
where z is the zero in W, then for any
0
≤ i ≤
j
≤ n,
For any
g
∈ W ↑ G²
, a natural number n, and a, b
∈ G, the fundamental
equation on (
g
; n , a, b
) is given by the following functional equations:
where
2
≤ m ≤ n.
Applying these equations to Hu’s counterexample, one obtains:
ƒ
4
〈
〉
(
A,E
) =1, with
A →
B
→ C → D
→
E
being its policy. However, it can be
11
easily seen that
g
〈4
〉
(
AE
)
= 0 and A → B
2
→
C
→
D
2
→
E
is the global optimum
policy with weight 0. That is, in this example,
ƒ
4
〈
〉
(
A,E
)
≠
g
〈
4
(
〉
A,E
).
Hence, we
ask when will the weight obtained from the fundamental equation approach be the
same as the global optimum weight?
138
Chapter 7
7.3.
Generalized Principle of Optimality
By formalizing the discussion in the previous section, Wu and Wu (1984a)
obtained one sufficient and three necessary conditions for Bellman’s principle to
hold. In this section, all results are based on (Wu and Wu, 1984a).
In general, let W and G represent two nonempty sets,
θ
1
:
p
(
W
)
→ W be the
optimum option satisfying Eq. (7.1), and
θ
2
be a mapping from W
2
into W. For
any element g
∈ W ↑ G
2
and any
a
0
,
a
n
∈ G, define
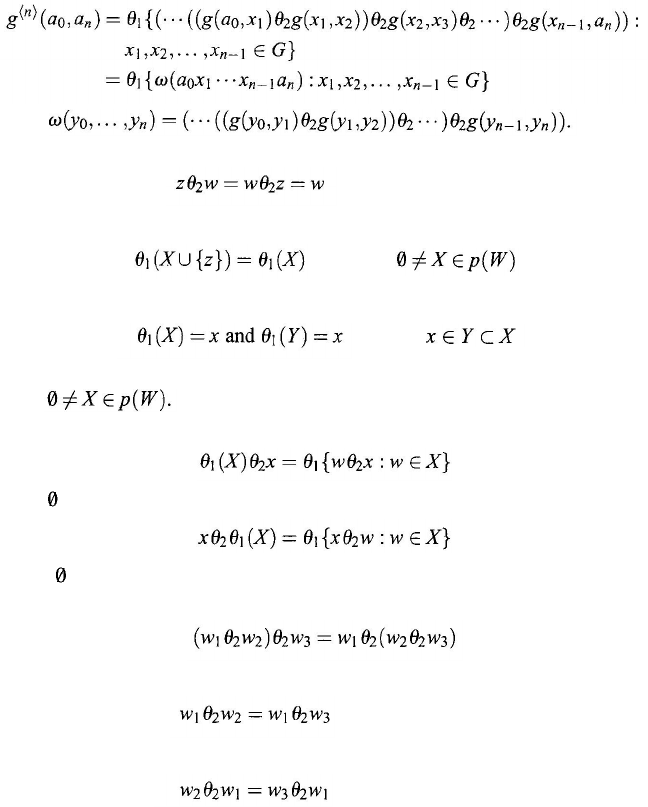
where
An element z
∈ W is called a zero element, or simply zero if
for each
w
∈
W
and
for each
The optimum option
θ
1
is X-optimum-preserving for X ∈ p(W) if
for any
The option
θ
1
satisfies the optimum-preserving law if
θ
1
is X-optimum-preserving
for all
The relation θ
2
is distributive over θ
1
if
for all
≠
X
∈
p
(W ) and any x ∈ W, and
for all
≠ X ∈ p (W ) and x ∈ W. The relation θ
2
is associative if for any
w
l
,w
,w
3
∈ W,
2
The relation θ
2
satisfies the cancellation law if for any w
1
, w
2
,
w
3
∈ W,
implies w
2
=
w
3
and
implies w
2
= w
3
whenever w
1
is not the zero element in W.
Bellman’s Principle of Optimality and Its Generalizations
139
Theorem 7.3.1 [Generalized Principle of Optimality (Wu and Wu, 1984a)].
Assume that
θ
1
satisfies the optimum-preserving law and that θ
2
is associative,
cancellative and distributive over
θ
1
. Then in the system (
W, G;
θ
1
, θ
2
),
Bellman's
Principle of Optimality (Theorem 7.2.1) holds.
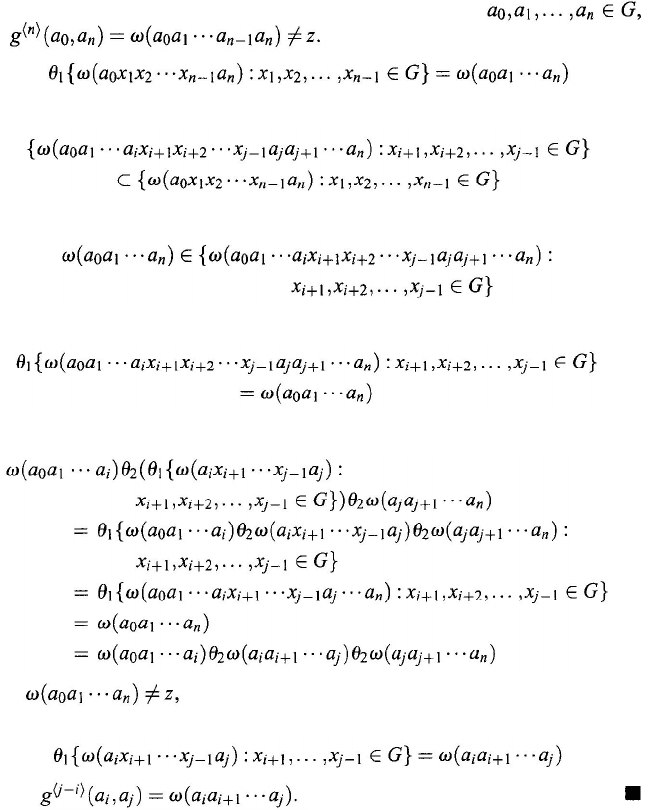
Proof:
Suppose that g ∈ W ↑ G
2
, n is a natural number,
and
For any 0 ≤ i ≤ j ≤ n, since
and
and
then by the optimum-preserving law of
θ
1
, it follows that
By the associative law and the distributive law over θ
1
of
θ
2
, one has
Since
one has that
ω(a
0
a
1
...
a
i
)
≠ z and ω
(a
j
a
j +1
...
a
n
) ≠ z.
Therefore, by the cancellation law of
θ
2
,
That is,
The generalized principle of optimality is a sufficient condition of the con-
servation from a global optimization to local ones. In the following section, it is
shown that the conditions in the generalized optimality principle are also necessary
except for the condition of associativity.
140
Chapter 7
7.4.
Some Partial Answers and a Conjecture
Theorem 7.4.1 [Wu and Wu (1984a)]. Assume that θ
2
is associative, n a natu-
ral number, and a
0
, a
1
, . . . , a
n
∈ G satisfy Eq. (7.3). If the Generalized Principle
of Optimality (Theorem 7.3.1) holds for a chosen g
∈ W ↑ G
2
, then θ
2
pos-
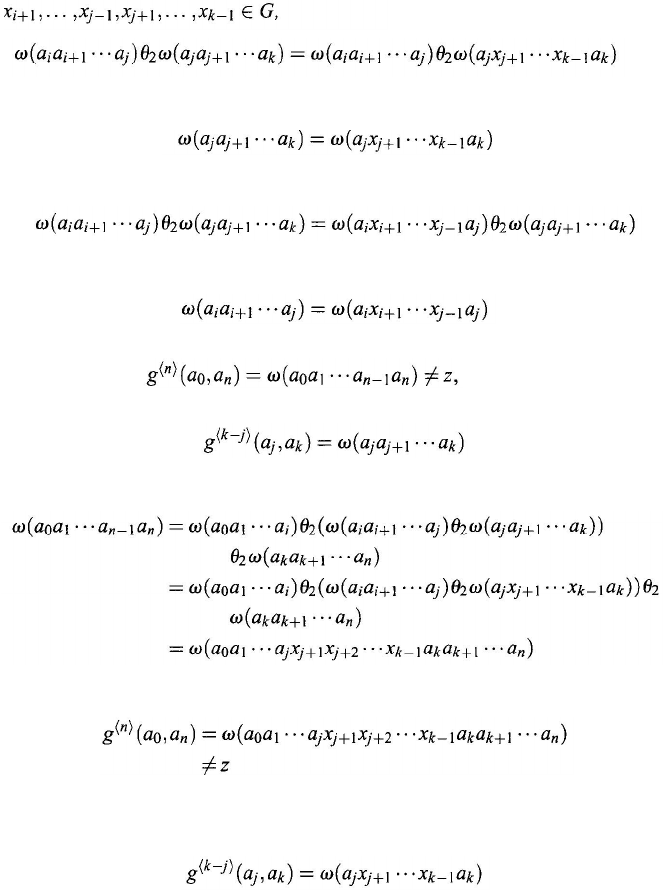
sesses the following property of cancellation: for any 0
≤ i < j < k ≤ n and any
(7.4)
implies
and
implies
Proof: Since
and from the assumption
that the Generalized Principle of Optimality holds, it follows that
(7.5)
By Eq. (7.4) and the associative law of
θ
2
, it follows that
That is,
From the assumption that the Generalized Principle of Optimality holds, it
follows that
(7.6)
Bellman’s Principle of Optimality and Its Generalizations
141
By Eqs. (7.5) and (7.6), it follows that
The proof of the other equation is similar and is omitted.
Theorem 7.4.2 [Wu and Wu (1984a)]. Assume that
θ
1
satisfies the optimum-
preserving law,
θ
2
is associative, n os a natural number, and a
0
, a
1
, . . . , a
n
∈ G
satisfy Eq. (7.3). If the Generalized Principle of Optimality (Theorem 7.3.1) holds,
then θ
2
possesses the following distributivity over θ
1
: for 1 ≤
i ≤ n – 1,
and
Proof: Since it is assumed that the Generalized Principle of Optimality holds,
it follows that
(7.7)
The assumption that
θ
1
satisfies the optimum-preserving law implies that
(7.8)
Then, from Eqs. (7.7) and (7.8) and the associative law of
θ
2
, it follows that
just what is desired. The proof of the other identity is similar and is omitted.