Wilamowski B.M., Irwin J.D. The Industrial Electronics Handbook. Second Edition: Industrial Communication Systems
Подождите немного. Документ загружается.

Quality of Service 19-13
2.and.3.will.start.to.drop,.but.WRED.will.also.continue.to.randomly.drop.packets.with.CoS.0.and.1..
en
al
.re
sult
.is.th
at
.th
ere
.wi
ll
.be.mo
re
.pa
ckets
.dr
opped
.wi
th
.Co
S
.0.an
d
.1.th
an
.wi
th
.Co
S
.2.an
d
.3.
19.4.2 High availability Solutions for the routers
As. mentioned. previously,. another. feature. for. the. “service. level”. solution. is. the. availability. of. the.
net
work.
.Non
e
.of.the.pre
vious
.QoS.sol
utions
.wil
l
.wor
k
.if.the.net
work
.dev
ices
.(sw
itches
.and
/or
.rou
ters)
.
whe
re
.mus
t
.be.imp
lemented
.are.not.wor
king.
.is.mea
ns
.tha
t
.any.com
plete
.net
work
.QoS.sol
ution
.mus
t
.
tak
e
.in
to
.ac
count
.th
e
.re
dundancy
.fo
r,
.at.le
ast,
.th
e
.mo
st
.se
nsible
.ro
uters
.in.th
e
.ne
twork.
Nowadays,
.thi
s
.is.imp
lemented
.alm
ost
.uni
versally
.by.usin
g
.the.Vir
tual
.Rou
ter
.Red
undancy
.Pro
tocol
.
(VR
RP).
.e.VRR
P
.[26
]
.obl
iges
.to.dup
licate
.rou
ters
.and.lin
ks
.to.ens
ure
.con
tinuity
.of.ser
vice
.acr
oss
.
fai
lures.
.It.int
roduces
.the.con
cept
.of.“vi
rtual
.rou
ter”
.tha
t
.is.add
ressed
.by.IP.cli
ents
.req
uiring
.rou
ting
.
ser
vice.
.e.re
al
.ro
uting
.se
rvice
.is.pr
ovided
.by.ph
ysical
.ro
uters
.ru
nning
.th
e
.VR
RP.
ere
.ar
e
.a.nu
mber
.of.de
scriptive
.te
rms
.in
troduced
.by.VR
RP:
•
. Virtual.router,.a.single.router.image.created.through.the.operation.of.one.or.more.routers.run-
ning
.VR
RP.
•
. Vir
tual
.rou
ter
.ID.or.VRI
D,
.a.num
erical
.ide
ntication
.of.a.par
ticular
.vir
tual
.rou
ter.
.It.mus
t
.be.
uni
que
.on.a.ne
twork
.se
gment.
•
. Vir
tual
.rou
ter
.IP,.an.IP.add
ress
.ass
ociated
.wit
h
.a.VRI
D
.tha
t
.the.oth
er
.hos
ts
.use.to.obt
ain
.net
work
.
ser
vice.
.It.is.ma
naged
.by.th
e
.VR
RP
.in
stances
.be
longing
.to.a.VR
ID.
•
. Vir
tual
.MAC.add
ress,
.a.pre
dened
.MAC.add
ress
.use
d
.for.all.VRR
P
.act
ions
.(fo
r
.Ethe
rnet)
.ins
tead
.
of.th
e
.re
al
.ad
apter
.MA
C
.ad
dress(es).
.It.is.de
rived
.fr
om
.th
e
.VR
ID.
•
. Mas
ter,
.the.VRR
P
.ins
tance
.tha
t
.per
forms
.the.rou
ting
.fun
ction
.for.the.vir
tual
.rou
ter
.at.a.giv
en
.
tim
e.
.On
ly
.on
e
.ma
ster
.is.ac
tive
.at.a.ti
me
.fo
r
.a.gi
ven
.VR
ID.
•
. Bac
kup,
.oth
er
.VRR
P
.ins
tances
.for.a.VRI
D
.tha
t
.are.act
ive,
.but.not.in.the.mas
ter
.sta
te.
.Bac
kups
.are.
rea
dy
.to.ta
ke
.on.th
e
.ro
le
.of.th
e
.ma
ster
.if.th
e
.cu
rrent
.ma
ster
.fa
ils.
•
. Pri
ority,
.a.val
ue
.assi
gned
.to.di
erent
.VRR
P
.ins
tances,
.as.a.way.to.det
ermine
.whi
ch
.rou
ter
.wil
l
.
tak
e
.on.th
e
.ro
le
.of.th
e
.ma
ster
.if.th
e
.cu
rrent
.ma
ster
.fa
ils.
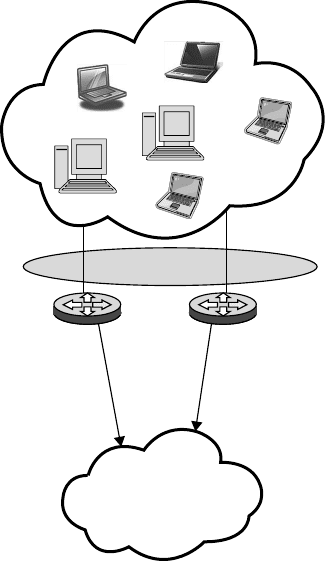
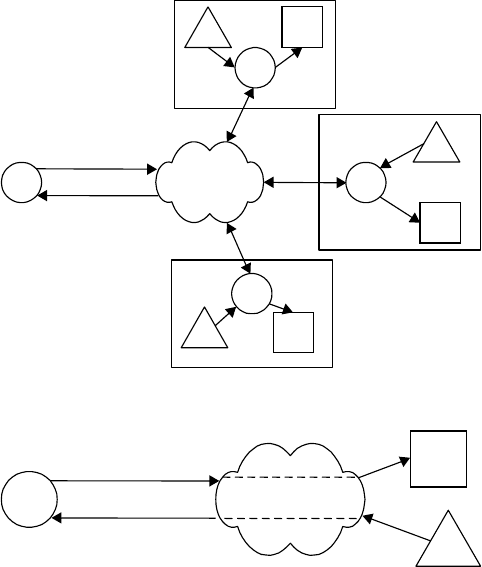
Figure
.19.
8
.sho
ws
.a.simp
le
.VRR
P
.con
guration,
.wit
h
.two.rou
ters
.con
necting
.to.a.net
work
.clo
ud
.and.
VRR
P
.pr
oviding
.a.re
silient
.ro
uting
.fu
nction
.fo
r
.th
e
.cl
ient
.ma
chines
.in.th
e
.lo
cal
.ar
ea
.ne
twork.
Router
.rA.is.the.mas
ter
.of.vir
tual
.rou
ter
.VRI
D
.1.and.rou
ter
.rB.is.at.the.bac
kup
.sta
te.
.Whe
n
.a.VRR
P
.
ins
tance
.is.in.the.mas
ter
.sta
te
.for.a.VRI
D,
.it.sen
ds
.mul
ticast
.pac
kets
.to.the.reg
istered
.VRR
P
.mul
ticast
.
add
ress
.ad
vising
.ot
her
.VR
RP
.in
stances
.th
at
.it.is.th
e
.ma
ster
.fo
r
.th
e
.VR
ID,
.wi
th
.a.tw
ofold
.ob
jective:
•
. If.a.VRR
P
.ins
tance
.wit
h
.a.hig
her
.pri
ority
.for.tha
t
.VRI
D
.is.sta
rted,
.the.new.VRR
P
.ins
tance
.can.
for
ce
.an
d
.el
ection
.an
d
.ta
ke
.on.th
e
.ma
ster
.ro
le.
•
. VRR
P
.ins
tances
.in.the.bac
kup
.sta
te
.for.the.VRI
D
.lis
ten
.for.the.mas
ter’s
.pac
kets;
.if.an.int
erval
.
ela
pses
.wit
hout
.a.pac
ket
.bei
ng
.rec
eived,
.the.ins
tances
.in.the.bac
kup
.sta
te
.tak
e
.act
ion
.to.ele
ct
.a.
new.ma
ster.
In
.Fi
gure
.19
.8,
.on
e
.of.th
e
.fo
llowing
.mu
st
.be.tr
ue
.ab
out
.ro
uter
.rA
:
•
. It.ha
s
.a.hi
gher
.pr
iority
.th
an
.ro
uter
.rB
.
•
. If.bo
th
.ro
uters
.ha
ve
.th
e
.sa
me
.pr
iority,
.it
s
.in
terface
.IP.ad
dress
.is.hi
gher
.th
an
.th
at
.of.ro
uter
.rB
.
If
.rou
ter
.rA.fai
ls,
.ae
r
.a.sho
rt
.int
erval
.rou
ter
.rB.wou
ld
.not
ice
.tha
t
.no.mul
ticast
.pac
ket
.has.bee
n
.
rec
eived
.and.tra
nsitions
.to.the.mas
ter
.sta
te,
.tak
ing
.ove
r
.the.han
dling
.of.the.vir
tual
.IP.add
ress
.and.sen
d-
ing
.it
s
.ow
n
.mu
lticast
.pa
ckets.
e
.tim
e
.rou
ter
.rB.wai
ts
.bef
ore
.mak
ing
.its.sta
te
.tra
nsition
.is.cal
led
.the.mas
ter
.dow
n
.int
erval
.and.is.
bas
ed
.on.the.len
gth
.of.tim
e
.bet
ween
.mas
ter
.upd
ates
.(ad
vertisement
.int
erval)
.and.a.val
ue
.cal
led
.ske
w
.
tim
e
.ca
lculated
.fr
om
.th
e
.pr
iority
.va
lue.
© 2011 by Taylor and Francis Group, LLC
19-14 Industrial Communication Systems
When.the.problem.with.router.rA.is.resolved,.and.depending.on.its.conguration,.either.of.two.
situations.would.occur:
•
. If.Router.rA.is.congured.to.start.as.master,.it.will.force.an.election.immediately.by.sending.its.
rst.advertisement.as.master..Router.rB.will.receive.this.advertisement.and.transition.to.backup.
state.
•
. If.Router.rA.is.congured.to.start.as.backup,.it.will.transition.from.initialization.to.backup.state..
Nothing.will.happen.until.it.receives.an.advertisement.from.router.rB..Router.rB.has.a.lower.
priority.than.router.rA,.so.router.rA.will.start.an.election.by.commencing.its.transition.to.master.
state.and.sending.an.advertisement..When.it.receives.this.advertisement,.router.rB.will.transition.
to.backup.state.because.router.rA.has.higher.priority.
Although
.VRRP.is.based.on.Cisco’s.proprietary.Hot.Standby.Router.Protocol.(HSRP,.[26]).concepts,.
VRRP.is.actually.a.standardized.version.of.Cisco’s.HSRP..ose.protocols,.while.similar.in.concept,.are.
not.compatible..ere.are.a.great.number.of.implementations.besides.the.Cisco.devices.one.
references
. 1.. R..Zurawski,.ed.,.e Industrial Communication Technology Handbook,.CRC.Press,.Boca.Raton,.
FL,.2005.
. 2.. W..Stallings,.High Speed Networks and Internets. Performance and Quality of Service,.Prentice.Hall,.
Englewood.Clis,.NJ,.2002.
. 3.. J..García.Tomás,.J.L..Raya,.and.V..Rodrigo,.Alta velocidad y calidad de servicio en Redes IP,.Ed..
Ra-Ma,.Alfaomega,.Mexico,.2002.
VRID 1
Virtual IP 192.168.44.1
rA rB
Master
Backup
Router rB VRID 1
Priority: 20
Ethernet IP address:
192.168.44.3
LAN
Router rA VRID 1
Priority: 250
Ethernet IP address:
192.168.44.2
FIGURE 19.8 Simple.VRRP.example.
© 2011 by Taylor and Francis Group, LLC
Quality of Service 19-15
. 4.. itSMF. International,. IT Service Management: An Introduction,. itSMF. Library,. Van. Haren.
Pub
lishing,
.Zal
tbommel,
.Hol
land,
.200
7.
. 5.. R..An
derson,
.Se
curity Engineering,
.Jo
hn
.Wi
ley
.&.So
ns,
.Ne
w
.Yo
rk,
.2001.
. 6.. RFC.219
6,
.Site
Security Handbook,
.IET
F
.(In
ternet
.Eng
ineering
.Tas
k
.For
ce),
.Sep
tember
.199
7,
.
ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 7.. ISO/IEC. 27001,. Info
rmation
. tec
hnology—Security
. tec
hniques—Information
. sec
urity
. man
age-
ment
.system
s—Requirements,
.an.ISO.(Int
ernational
.Organiza
tion
.for.Sta
ndardization)
.sta
ndard,
.
Gene
va,
.Sw
itzerland,
.2005,.ava
ilable
.at.ht
tp://www.iso.org/,
.access.in.Ju
ly,
.2010.
. 8.. ISO
/IEC
.154
08,
.Inf
ormation
.tech
nology—Security
.tech
niques—Evaluation
.cri
teria
.for.IT.secu
rity—
Part
.1:.Intr
oduction
.and.gen
eral
.mod
el,
.an.ISO.(In
ternational
.Org
anization
.for.Sta
ndardization)
.
sta
ndard,
.Gen
eva,
.Swi
tzerland,
.200
5,
.ava
ilable
.at.htt
p://www.iso.org/,
.acc
ess
.in.July
,
.201
0.
. 9.. IEEE.1402,.Gui
de for Electric Power Substation Physical and Electronic Security,
.e.Ins
titute
.of.
Elec
trical
.an
d
.Ele
ctronics
.Eng
ineers,
.In
c.,
.Pi
scataway,
.NJ,.2000.
. 10.. Pro
cess
.Con
trol
.Sec
urity
.Req
uirements
.For
um,
.spo
nsorized
.by.Nat
ional
.Ins
titute
.of.Sta
ndards
.and.
Tec
hnologies,
.Gait
hersbug,
.MD,.avai
lable
.at.htt
p://www.isd.mel.nist.gov/projects/processcontrol/,
.
access.on.Ma
y
.2009.
. 11.. ANSI/ISA-TR99.00.01-2007,.Secu
rity Technologies for Industrial Automation and Control Systems,
.
an.ANSI/ISA.(Amer
ican
.Nat
ional
.of.Sta
ndards
.Ins
titute/International
.Societ
y
.of.Aut
omation)
.sta
n-
dard,
. 2007,. Was
hington
. D.C.,. avai
lable
. at. htt
p://www.standardsportal.org/usa_en/sdo/isa.aspx,
.
access.in.July,.2010.
. 12.. R..Fro
om,
.B..Siva
subramanian,
.and.E..Frahim,.Bui
lding Cisco Multilayer Switched Networks,
.Cisco.
Pres
s,
.In
dianapolis,
.IN,.2006.
. 13.. RFC.1633,.Int
egrated Services in the Internet Architecture: An Overview,
.IETF.(Int
ernet
.Engin
eering
.
Tas
k
.Fo
rce),
.Jun
e
.1994,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 14.. RFC.247
4,
.De
nition of the Dierentiated Services Field (DS eld in the IPv4 and IPv6 headers),
.IET
F
.
(In
ternet
.Eng
ineering
.Tas
k
.For
ce),
.Dec
ember
.199
8,
.ava
ilable
.at.htt
p://www.ietf.org/,
.acc
ess
.in.Jul
y,
.201
0.
. 15.. RFC. 2475,. An A
rchitecture for Dierentiated Services,
. IETF. (Int
ernet
. Engin
eering
. Tas
k
. For
ce),
.
Decem
ber
.1998,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 16.. RFC.2205,.Res
ource ReSerVation Protocol (RSVP),
.Versio
n
.1.Func
tional
.Spe
cication,
.IETF.(Int
ernet
.
Engin
eering
.Ta
sk
.Fo
rce),
.Sep
tember
.1997,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 17.. RFC.2210,.e U
se of RSVP with IETF Integrated Services,
.IETF.(Int
ernet
.Engin
eering
.Tas
k
.For
ce),
.
Sept
ember
.1997,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 18.. RFC. 3936,. Pro
cedures for Modifying the Resource reSerVation Protocol (RSVP),
. IETF. (Int
ernet
.
Engin
eering
.Ta
sk
.Fo
rce),
.Oc
tober
.2004,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 19.. RFC.2748,.e C
OPS (Common Open Policy Service) Protocol,
.IETF.(Int
ernet
.Engin
eering
.Tas
k
.
For
ce),
.Ja
nuary
.2000,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 21.. RFC.2597,.Ass
ured Forwarding PHB Group,
.IETF.(Int
ernet
.Engin
eering
.Tas
k
.For
ce),
.Jul
y
.1999,.
avai
lable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 22.. RFC.3246,.An E
xpedited Forwarding PHB (Per-Hop Behavior),
.IETF.(Int
ernet
.Engin
eering
.Tas
k
.
For
ce),
.Ma
rch
.2002,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 23.. RFC.3550,.RTP:.A Tr
ansport Protocol for Real-Time Applications,
.IETF.(Int
ernet
.Engin
eering
.Tas
k
.
For
ce),
.Ju
ly
.2003,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 24.. RFC.3413,.Si
mple Network Management Protocol (SNMP) Applications,
.IETF.(In
ternet
.Eng
ineering
.
Tas
k
.Fo
rce),
.De
cember
.2002,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
. 25.. RFC.2309,.Rec
ommendations on Queue Management and Congestion Avoidance in the Internet,
.IETF.
(Int
ernet
.Engin
eering
.Tas
k
.For
ce),
.Apr
il
.1998,.avai
lable
.at.htt
p://www.ietf.org/,
.access.in.Jul
y,
.2010.
. 26.. RFC.3768,.Vir
tual Router Redundancy Protocol (VRRP),
.IETF.(Int
ernet
.Engin
eering
.Tas
k
.For
ce),
.
Apr
il
.2004,.ava
ilable
.at.ht
tp://www.ietf.org/,
.access.in.Ju
ly,
.2010.
© 2011 by Taylor and Francis Group, LLC
20-1
20.1 Introduction
Industrial.control.applications.use.controllers,.sensors,.and.actuators.to.close.control.loops..Sensors.
and.actu
ators
.are.usua
lly
.dist
ributed
.topol
ogically
.thro
ugh
.the.cont
rolled
.plan
t.
.As.ubiq
uitous
.embed
-
ded
.cont
rollers,
.sens
ors,
.and.actu
ators
.are.more.and.more.comm
on,
.whil
e
.inex
pensive
.and.reli
able
.
comm
unication
.syst
ems
.are.read
y
.for.use.in.the.indu
stry,
.many.of.the.cont
rol
.loop
s
.are.clos
ed
.using.
indu
strial
.comm
unication
.syst
ems.
.A.larg
e
.part.of.the.indu
stry
.cont
rol
.loop
s
.are.disc
rete
.in.natu
re,
.
wher
e
.a.sequ
ence
.of.disc
rete
.acti
ons
.are.done.aer.a.sequ
ence
.of.sensi
ngs,
.e.g.,.aer.a.disp
lacement
.has.
been.comp
leted,
.a.motor.has.to.stop..From.the.cont
rol
.side,.a.disc
rete
.syst
em
.has.as.major.cons
traint,
.
the.syst
em
.resp
onse
.time
,
.or.the.maxi
mum
.time.that.can.be.acce
pted
.betw
een
.occu
rrence
.of.a.stim
ulus
.
and.the.reac
tion
.on.the.plan
t.
.Prev
ious
.chapt
ers
.of.the.book.addr
ess
.how.the.indu
strial
.comm
unication
.
syst
ems
.att
ain
.the.goa
l
.of.sen
ding
.mes
sages
.kee
ping
.thi
s
.con
straint.
Continuous
.cont
rol
.loop
s
.die
r
.from.discret
e
.cont
rol
.loop
s
.in.that.the.cont
inuous
.sign
al
.meas
urement
.
is.used.by.the.cont
roller
.to.calc
ulate
.(usi
ng
.die
rential
.equa
tions)
.the.cont
inuous
.sign
al
.to.be.send.to.the.
actu
ator.
.ose.cont
inuous
.sign
als
.can.be.prop
erly
.appr
oximated
.by.time
-discretized
.sequ
ences
.of.valu
es
.
that.main
tain
.the.dyna
mic
.char
acteristics
.of.the.samp
led
.syst
em.
.A.goal.when.conn
ecting
.thro
ugh
.a.com-
m
unication
.netwo
rk
.sens
ors,
.cont
rollers,
.and.actu
ators
.in.a.cont
inuous-time
.cont
rol
.loop.is.to.main
tain
.
the.dyna
mic
.char
acteristics
.of.the.extr
acted
.data.from.the.sequ
ence
.of.mess
ages.
Communication
. netw
orks
. for. feed
back
. cont
rol
. are. in. incr
easing
. use.. A. netw
ork-based
. cont
rol
.
(NBC
)
.syst
em
.is.comp
osed
.of.dist
ributed
.node
s
.shar
ing
.feed
back
.cont
rol-related
.info
rmation
.throu
gh
.
a.comm
unication
.chan
nel.
.e.basi
c
.con
guration
.is.give
n
.by.one.sens
or
.node.that.coll
ects
.proce
ss
.
sens
or
.data
,
.one.cont
roller
.node.that.rece
ives
.the.sens
or
.data
,
.calc
ulates
.the.cont
rol
.acti
on
.and.send
s
.
20
Network-Based Control
20.1. Introduction.....................................................................................20-1
20.2
. Mutu
al
.Con
cepts
.in.Con
trol
.and.in.Com
munications.............20-2
20.3
. Arch
itecture
.of.Net
worked-Based
.Con
trol.................................20-2
Connection.Types
20.4. Network.Eects.in.Control.Performance....................................20-6
20.5
. Desig
n
.in.NBC.
................................................................................20-6
Design.Constraints.in.the.Network.Side. •. Design.Constraints.
in.the.Control.Side. •. Network.and.Control.Co-Design
20.6. Summary...........................................................................................20-7
References.....................................................................................................20-8
Josep M. Fuertes
Universitat Politècnica
de Cat
alunya
Mo-Yuen Chow
North Carolina
Stat
e
Uni
versity
Ricard Villà
Universitat Politècnica
de Cat
alunya
Rachana Gupta
North Carolina
Stat
e
Uni
versity
Jordi Ayza
Universitat Politècnica
de Cat
alunya
© 2011 by Taylor and Francis Group, LLC
20-2 Industrial Communication Systems
it.to.an.actuator.node,.and.that.actuator.node.that.actuates.on.the.process..At.least.two.feedback.
control.nodes.are.needed.to.have.a.proper.NBC.system.(as.one.of.those.nodes.can.have.two.functions,.
i.e.,.a.sensor.and.controller.node.or.a.controller.and.actuator.node)..In.both.cases,.there.is.messaging.of.
sensor.to.controller.or.controller.to.actuator.nodes..In.general,.we.should.consider.that.the.network.is.
shared.with.other.nodes,.they.being.feedback.control.or.any.other.applications..e.result.is.that.NBC.
systems.can.contain.a.large.number.of.interconnected.devices.(controllers,.actuators,.sensors).that.use.
the.network.for.interchanging.control.messages.
Feedback
.control.imposes.several.restrictions.on.the.communication.networks..e.multiple.access.
schemes.of.common.industrial.buses.serialize.the.sending.of.the.messages.through.the.shared.media..
As.a.result,.communication.delays.are.created.in.the.feedback.control.loop..Delays.inside.a.control.loop.
tend.to.instabilize.the.controlled.plant..In.addition,.packets.may.be.lost.in.a.noisy.channel,.breaking.the.
control.loop.path.and.having.also.a.possible.bad.consequence.on.the.controlled.process..is.chapter.
reviews.the.eects.on.the.control.side.of.the.communication.technology..It.also.talks.about.how.a.proper.
use.of.the.communication.channel.can.favor.the.dynamic.operation.of.the.control.loop.and.how.the.
control.law.is.to.be.adjusted.to.take.into.consideration.the.communication-imposed.constraints.
20.2 Mutual Concepts in Control and in Communications
In.a.networked.control.system.(NCS),.the.feedback.and.the.command.signals.use.a.communication.net-
work
.link..When.introducing.a.network.in.the.control.loop,.some.inconveniences.such.as.band-limited.
channels,.delays,.and.packet.dropouts.occur..Such.network.may.also.be.shared.by.other.applications,.
resulting.in.the.channel.being.inaccessible,.as.sharing.a.communication.channel.imposes.a.wait.time.
until.the.channel.is.accessible.again..From.the.point.of.view.of.control,.it.represents.an.additional.delay.
between.the.sensor.measurement.and.the.control.actuation,.resulting.in.a.potential.loss.of.control.per-
formance.
.Classical.discrete.controller.design.imposes.a.periodic.sampling.scheme,.which.also.imposes.
hard.real-time.operation..e.classical.denition.of.hard.real-time.system.is.that.the.actions.or.tasks.
shall.be.executed.within.a.hard.deadline.or.the.result.is.no.longer.valid..In.a.controlled.system,.the.
restriction.is.more.severe,.as.the.sampling.and.actuation.is.required.to.be.with.(not.within).a.prescribed.
period..As.in.many.cases.strictly.periodic.operation.cannot.be.assured,.due.to.message.loss.or.commu-
nication
.incurred.delays,.several.schemes.can.be.used.
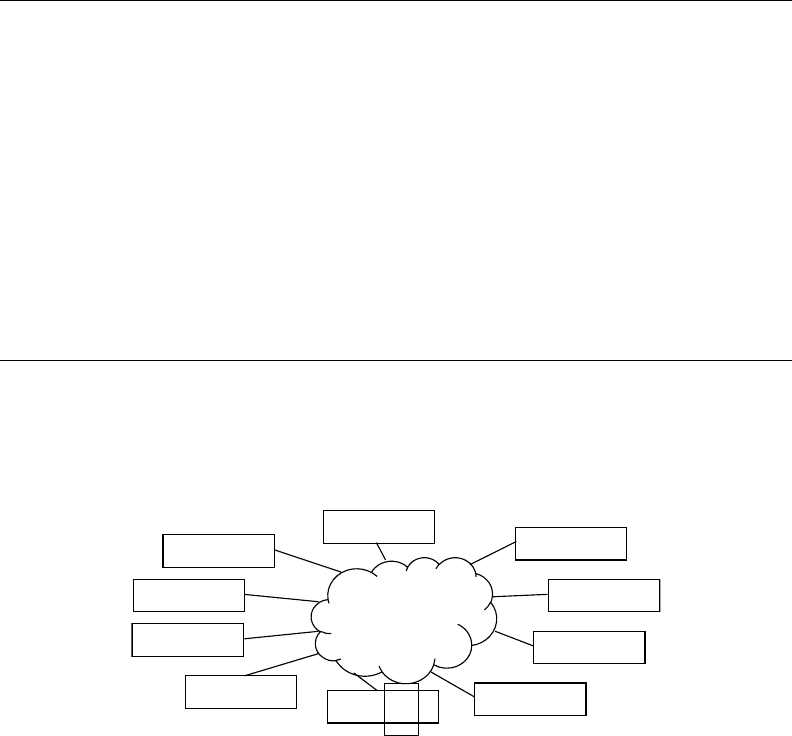
20.3 architecture of Networked-Based Control
When.a.traditional.feedback.control.system.is.closed.via.a.communication.channel.(such.as.a.network),.
which.maybe.shared.with.other.nodes.outside.the.control.system,.then.the.control.system.is.classied.as.
an.NCS.or.NBC.system..All.denitions.found.in.literature.for.NBC.have.one.key.feature.in.common..is.
dening.feature.is.that.information.(reference.input,.plant.output,.control.input,.etc.).is.exchanged.among.
control.system.components.(sensor,.controller,.actuator,.etc.).using.a.shared network.(see.Figure.20.1).
Supervisor
Plant-1
Plant-2
Plant-m
Sensor-t
Network
Sensor-2
Sensor-1
Controller-n
Controller-2
Controller-1
FIGURE 20.1 Typical.NBC.architecture.
© 2011 by Taylor and Francis Group, LLC
Network-Based Control 20-3
Thus,.the.basic.capabilities.of.any.NBC.are.information.acquisition.(sensors/users),.command.
(controllers/users),. communication,. and. network. and. control. (actuators).. In. broader. terms,. NCS.
research.and.application.is.categorized.into.two.parts.
. 1..Control of network:.Study.and.research.on.communications.and.networks.to.make.them.suitable.
for.real-time.NCS,.e.g.,.routing.control,.congestion.reduction,.ecient.data.communication,.and.
networking.protocol.
. 2.. Control over network:.is.deals.more.with.control.strategies.and.control.systems.design.over.
the.network.to.minimize.the.eect.of.adverse.network.parameters.on.NCS.performance.such.as.
network.delay.
is
.chapter.is.mainly.focused.on.“control.over.network.”
20.3.1 Connection types
ere.are.two.major.types.of.control.systems.that.utilize.communication.networks..ey.are.(1).shared-
network
.control.systems.and.(2).remote.control.systems.
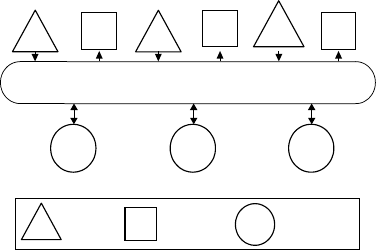
20.3.1.1
Shared-Network Control Systems
Using
.shared-network.resources.to.transfer.measurements,.from.sensors.to.controllers.and.control.signals.
from.controllers.to.actuators.can.greatly.reduce.the.complexity.of.connections..is.method,.as.shown.in.
Figure.20.2,.is.systematic.and.structured,.provides.more.exibility.in.installation,.and.eases.maintenance.
and.troubleshooting..Furthermore,.networks.enable.communication.among.control.loops..is.feature.is.
extremely.useful.when.a.control.loop.exchanges.information.with.other.control.loops.to.perform.more.
sophisticated.controls,.such.as.fault.accommodation.and.control..Similar.structures.for.NBC.have.been.
applied.to.automobiles.and.industrial.plants.
20.3.1.2
remote Control Systems
On
.the.other.hand,.a.remote.control.system.can.be.thought.of.as.a.system.controlled.by.a.controller.
located.far.away.from.it..is.is.sometimes.referred.to.as.teleoperation.control..Remote.data.acquisition.
systems.and.remote.monitoring.systems.can.also.be.included.in.this.class.of.systems.
ere
.are.two.general.approaches.to.design.an.NBC.system..e.rst.approach.is.to.have.several.sub-
systems
.form.a.hierarchical.structure,.in.which.each.of.the.subsystems.contains.a.sensor,.an.actuator,.
and.a.controller.by.itself,.as.depicted.in.Figure.20.3..ese.system.components.are.attached.to.the.same.
control.plant..In.this.case,.a.subsystem.controller.receives.a.set.point.from.the.central.controller.C
M
..e.
subsystem.then.tries.to.satisfy.this.set.point.by.itself..e.sensor.data.or.status.signal.is.transmitted.back.
via.a.network.to.the.central.controller.
S
1
C
1
C
2
C
3
Network
A
1
A
2
S
3
A
3
S
2
: Controller
: Sensor,
: Actuator,
FIGURE 20.2 Shared-network.connections.
© 2011 by Taylor and Francis Group, LLC
20-4 Industrial Communication Systems
e.second.approach.of.network.control.is.the.direct.structure,.as.shown.in.Figure.20.4..is.struc-
ture
.has.sensors,.actuators,.and.a.controller.of.a.control.loop.connected.directly.to.a.network..Both.the.
hierarchical.and.direct.structures.have.their.own.pros.and.cons..Many.NCS.include.features.from.both.
structures,.to.benet.from.their.advantages,.thus.dening.the.hybrid.NCSs.
More
.details.can.be.found.in.[1,2].
20.3.1.2.1 Communication Networks
A
.communication.network.is.the.backbone.of.the.NBC..Reliability,.security,.ease.of.use,.and.availability.
are.the.main.issues.while.choosing.the.communication.type..A.communication.network.giving.support.
to.an.NBC.should.have.a.deterministic.end-to-end.message.response.as.a.principal.property..is.is.the.
only.way.to.guarantee.the.real-time.response.required.by.the.control.algorithm.
e
.ARPANET.developed.by.Advanced.Research.Projects.Agency.Network.of.the.U.S..Department.
of.Defense.in.1969.was.the.world’s.rst.operational.packet.switching.network.and.the.predecessor.of.the.
global.Internet..Later.came.eldbus.(around.since.1988)—an.industrial.network.system.for.real-time.
distributed.control..Fieldbus.is.a.generic.term,.which.described.a.modern.industrial.digital.communica-
tions
.network.intended.to.replace.the.existing.4–20.mA.analog.signal.standard..is.network.is.a.digi-
tal,
.bidirectional,.multi-drop,.serial-bus.used.to.link.isolated.eld.devices,.especially.in.the.automated.
manufacturing.environment..Probus.(process.eldbus).is.a.standard.for.eldbus.communication.in.
automation.technology.and.was.rst.promoted.in.1989.by.BMBF.(German.department.of.education.and.
research).[3].
e
.basic.medium.control.access.scheme.is.the.time.division.multiple.access,.where.a.fraction.of.the.
channel.is.given.to.all.the.nodes..ere.are.several.medium.access.control.schemes.used.by.industrial.
networks..e.two.more.common.are.based.on.a.token-passing.scheme.and.a.random.access.scheme..
e.token-passing.scheme.uses.a.portion.of.the.network.bandwidth.for.transmitting.an.authorizing.
C
1
A
1
S
1
Control signal
Sensor measurement
Network
FIGURE 20.4 Data.transfers.of.direct.structure.
S
1
C
1
C
2
S
2
A
2
C
M
S
3
C
3
A
3
Set point
Network
Status or sensor
measurement
A
1
FIGURE 20.3 Data.transfers.of.hierarchical.structure.
© 2011 by Taylor and Francis Group, LLC
Network-Based Control 20-5
message.(token).that.gives.rights.to.its.receiving.node.to.transmit.one.or.more.queued.messages..e.
toke
n
.is.usu
ally
.sen
t
.to.an.ord
ered
.and.cyc
led
.lis
t
.of.nod
es.
.e.res
ult
.is.tha
t
.the.net
work
.giv
es
.an.
ord
ered
.acc
ess
.to.all.the.nod
es
.and.eac
h
.nod
e
.can.kno
w
.in.adv
ance
.the.max
imum
.del
ay
.a.giv
en
.mes
sage
.
wil
l
.in
cur
.be
fore
.ar
riving
.to.it
s
.de
stination.
e
.ran
dom
.acc
ess
.sche
me
.all
ows
.any.nod
e
.to.tra
nsmit
.when
ever
.it.nee
ds
.to.sen
d
.a.queu
ed
.mes
sage
.
pro
vided
.not.any.othe
r
.nod
e
.is.sen
ding
.a.mes
sage.
.If.ther
e
.is.a.mes
sage
.bei
ng
.sen
t
.thr
ough
.the.net
work,
.
the.nod
e
.wai
ts
.til
l
.the.end.of.thi
s
.mes
sage
.and.then.it.att
empts
.to.sen
d
.its.queu
ed
.mes
sage
.ae
r
.an.
act
ive
.wai
t,
.wher
e
.a.com
petition
.bet
ween
.the.wai
ting
.nod
es
.wil
l
.giv
e
.the.mes
sage
.acc
ess
.to.onl
y
.one.of.
them
.
.e.res
ult
.is.tha
t
.a.ran
dom
.acc
ess
.sche
me
.is.gen
erally
.non
deterministic.
On
.top.of.the.acc
ess
.sch
eme
.is.the.end
-to-end
.com
munication
.rel
ationship
.bet
ween
.nod
es.
.e.mos
t
.
com
mon
.re
lationships
.ar
e
.th
e
.ma
ster–slave,
.pr
oducer–consumer,
.an
d
.cl
ient–server.
•
. Mas
ter–Slave:
.e.net
work
.has.mas
ter
.nod
es
.and.sla
ve
.nod
es.
.Sla
ve
.nod
es
.onl
y
.rea
ct
.to.mas
ter
.
nod
es
.com
mands.
.Mas
ter
.nod
es
.sha
re
.the.cha
nnel
.acc
ess
.by.usin
g
.a.rou
nd-robin
.(i.
e.,
.toke
n
.pas
s-
ing)
.sc
heme.
.Pr
obus
.is.an.ex
ample
.of.th
is
.sc
heme.
•
. Pro
ducer–Consumer:
.e.net
work
.has.nod
es
.tha
t
.are.pro
ducers,
.con
sumers,
.or.bot
h.
.A.pro
ducer
.
nod
e
.whe
n
.it.has.a.mes
sage
.to.sen
d
.loo
ks
.for.the.rs
t
.opp
ortunity
.to.sen
d
.it.in.a.bro
adcast
.way
.
.
Con
sumer
.nod
es
.pic
k
.up.thi
s
.mes
sage
.con
tents
.as.soo
n
.as.the
y
.nee
d
.it..As.an.exa
mple,
.Con
trol
.
Are
a
.Net
work
.(CA
N)
.use
s
.thi
s
.par
adigm.
.CAN.is.one.of.the.acc
epted
.el
dbus
.sta
ndards—a
.
ser
ial,
.asy
nchronous,
.mul
ti-master
.com
munication
.pro
tocol
.desi
gned
.for.app
lications
.nee
ding
.
hig
h-level
.da
ta
.in
tegrity
.an
d
.da
ta
.ra
tes
.of.up.to.1.Mb
ps.
•
. Cli
ent–Server:
.In.thi
s
.cas
e,
.the.net
work
.has.cli
ent
.nod
es
.and.ser
ver
.nod
es.
.e.cli
ent
.nod
es
.sen
d
.
req
uests
.to.the.ser
ver
.nod
es
.for.ser
vices.
.Bas
ed
.on.the.bes
t
.eo
rt,
.the.ser
ver
.pro
vides
.thi
s
.ser
vice
.
and.not
ies
.the.com
pletion.
.is.sch
eme
.is.not.nec
essarily
.det
erministic
.as.the.ser
ver
.nod
e
.tak
es
.
as.mu
ch
.ti
me
.as.it.ne
eds.
e
.res
ult
.of.app
lication
.of.tho
se
.acc
ess
.and.rel
ationship
.sch
emes
.is.that.a.giv
en
.ind
ustrial
.net
work
.may.
par
tially
.use.a.cli
ent–server
.par
adigm
.and.a.pro
ducer–consumer
.or.mast
er–slave
.in.con
junction
.wit
h
.any.
of.the.acc
ess
.sch
emes.
.How.the.rel
ationship
.is.to.be.ope
rated
.dep
ends
.on.the.tra
nsaction
.to.be.don
e.
.For.
exa
mple,
.in.an.ind
ustrial
.app
lication,
.dur
ing
.the.com
missioning
.phas
e,
.a.cli
ent
.app
lication
.ins
talls
.an.
aut
omation
.pro
gram
.int
o
.a.Pro
grammable
.Log
ic
.Con
troller
.(PL
C),
.whi
ch
.act
s
.as.a.ser
ver,
.whi
le
.dur
ing
.
the.PLC.cyc
lic
.ope
ration,
.it.con
nects
.to.sen
sors
.and.act
uators
.bas
ed
.on.a.mast
er–slave
.sch
eme.
ere
.is.a.wid
e
.var
iety
.of.con
curring
.el
dbus
.sta
ndards
.and
,
.the
refore,
.man
y
.tim
es
.int
eroperability
.
bec
omes
.an.iss
ue.
.Ano
ther
.com
munications
.net
work
.use
d
.in.NCS
—Ethernet—has
.evo
lved
.into.the.
mos
t
.wid
ely
.imp
lemented
.phy
sical
.and.lin
k
.lay
er
.pro
tocol
.toda
y
.mai
nly
.bec
ause
.of.the.low.cos
t
.of.the.
net
work
.com
ponents
.and.the
ir
.bac
kward
.com
patibility
.wit
h
.the.exi
sting
.Ethe
rnet
.inf
rastructure.
.Now.
we.hav
e
.fas
t
.Ethe
rnet
.(1
0–100
.Mbp
s)
.and.Gig
abit
.Ethe
rnet
.(1
000
.Mbp
s)
.[5]
.
.Rec
ently,
.sw
itched
.Ethe
rnet
.
bec
ame
.a.ver
y
.pro
mising
.alt
ernative
.for.rea
l-time
.ind
ustrial
.app
lication
.bec
ause
.it.ele
minates
.the.col
li-
sion
.in.tr
aditional
.Eth
ernet
.[4
].
Overall,
.the.cho
ice
.of.net
work
.dep
ends
.upo
n
.the.desi
red
.app
lication.
.Tod
ay,
.wit
h
.the.hel
p
.of.tec
h-
nologies
.lik
e
.GPS
,
.ele
ctronics
.atl
as
.(Go
ogle
.map
s),
.we.are.loo
king
.at.mul
ti-agent
.tra
c
.con
trol
.in.urb
an
.
are
as
.wit
h
.ec
ient
.veh
icle
.com
munication
.[7]
.
.Mil
itary,
.sur
gical,
.and.oth
er
.eme
rgency
.med
ical
.app
li-
cations
.can.use.ded
icated
.opti
cal
.net
works
.to.ens
ure
.fas
t-speed
.and.rel
iable
.dat
a
.com
munication.
.e.
Int
ernet
.is.the.mos
t
.sui
table
.and.ine
xpensive
.cho
ice
.for.man
y
.app
lications,
.whe
re
.the.pla
nt
.and.the.con
-
troller
.ar
e
.fa
r
.aw
ay
.fr
om
.ea
ch
.ot
her
.[6
].
20.3.1.2.2 Sampling
an
d
Me
ssaging
in NB
C
Sampling
.is.the.act
ivity
.of.mea
suring
.the.fee
dback
.con
trol
.var
iable
.to.be.sen
t
.to.the.con
troller.
.e.cyc
lic
.
con
trol
.con
ceptual
.sch
eme
.fol
lows
.the.ord
er:
.sam
pling,
.con
trol
.law.com
putation,
.ord
er
.to.act
uator.
.e.
mos
t
.usu
al
.req
uirement
.for.thi
s
.seq
uence
.is.tha
t
.it.has.to.be.exe
cuted
.bas
ed
.on.a.xe
d
.clo
ck
.cyc
le
.tim
e.
.
Gen
eral
.con
trol
.law.mod
els
.ass
ume
.tha
t
.the.tim
e
.spe
nt
.bet
ween
.suc
cessive
.sam
ples
.is.a.con
stant,
.cal
led
.
© 2011 by Taylor and Francis Group, LLC

20-6 Industrial Communication Systems
the.sampling.period.T,.while.the.time.spent.between.the.sampling.and.the.actuation.instants.is.negli-
gible
.or.cons
tant
.and.know
n;
.but.the.samp
ling
.and.actu
ation
.mess
ages
.take.some.time
,
.whic
h
.depe
nds
.
on.the.acce
ss
.sche
me
.and.the.rela
tionship
.used
,
.and.the.cont
rol
.law.requ
ires
.some.comp
utation
.time
,
.
so.the.abov
e
.assu
mption
.does.not.hold
.
.is.eec
t
.beco
mes
.more.impo
rtant
.as.the.netw
ork
.tra
c
.load.
incr
eases.
Considering
.an.NBC.sche
me
.(Fig
ure
.20.2
),
.in.whic
h
.the.cont
rol
.loop
s
.consi
st
.of.plan
ts
.G,.and.con-
t
rollers
.C,.whic
h
.exch
ange
.thro
ugh
.mess
ages
.the.samp
led
.vari
ables
.y(kT).and.the.cont
rol
.vari
ables
.
c(kT),.wher
e
.k.is.the.numbe
r
.of.the.samp
le.
.As.soon.as.the.mess
ages
.are.sent.thro
ugh
.the.netw
ork,
.they.
expe
riment
.a.dela
y,
.so.the.cont
roller
.rece
ives
.a.dela
yed
.valu
e
.of.the.samp
led
.signa
l,
.y(kT + t
sc
),.while.
the.actu
ator
.rece
ives
.a.dela
yed
.valu
e
.of.the.cont
rol
.signa
l,
.c(kT + t
ca
),.where.t
sc
.and.t
ca
.are.the.time.delay.
betw
een
.sens
or
.to.cont
roller
.and.cont
roller
.to.actu
ator,
.resp
ectively.
.In.orde
r
.to.ensu
re
.syst
em
.perf
or-
mance,
.com
munication-induced
.tim
e
.del
ays
.hav
e
.to.be.con
sidered
.at.the.con
troller
.desi
gn
.sta
ge.
20.4 Network Effects in Control Performance
e.main.control.performance.parameters.in.a.controlled.system.are.stability.and.the.system.error..It.is.
clea
r
.that.stab
ility
.must.be.ensu
red
.in.all.cont
rolled
.syst
ems.
.e.syst
em
.erro
r,
.meas
ured
.on.a.time.win-
d
ow,
.show
s
.the.abil
ity
.of.a.closed
-loop
.syst
em
.to.recov
er
.aer.a.pert
urbation.
.In.gene
ral,
.we.can.stat
e
.that.
the.smal
ler
.the.syst
em
.erro
r,
.the.bett
er
.the.perf
ormance.
e
.perf
ormance
.of.an.NBC.syst
em
.depe
nds
.on.the.cont
rol
.stra
tegy,
.the.mess
age
.sche
duling
.algo
-
rithm,
.and.the.reli
ability
.of.the.comm
unication
.netw
ork.
.We.shal
l
.cons
ider
.the.case.of.limi
ted
.
comm
unication
.reso
urces
.(sen
sors,
.cont
rollers,
.and.actu
ators),
.whic
h
.shar
e
.and.comp
ete
.with.othe
r
.
node
s
.for.acce
ssing
.the.netw
ork.
.e.mess
age
.acce
ss
.sche
me
.and.the.comm
unication
.rela
tionship
.are.
used.as.sche
duling
.stra
tegies
.to.assig
n
.netw
ork
.acce
ss
.to.node
s.
.e.resu
lting
.sche
duling
.will.caus
e
.a.
shor
tening
.or.inc
reasing
.of.the.mes
sage
.lat
encies,
.thu
s
.in
uencing
.sys
tem
.per
formance.
A
.dela
y
.in.the.cont
rol
.loop.redu
ces
.the.syst
em
.perf
ormance
.[8]..As.larg
er
.is.the.dela
y,
.wors
e
.is.the.per-
f
ormance.
.If.the.dela
y
.is.know
n,
.it.can.be.incl
uded
.into.the.cont
rol
.desig
n
.as.a.para
meter
.and.its.eec
t
.
can.be.mini
mized.
.But.in.a.netw
orked
.cont
rol,
.the.netw
ork-induced
.dela
y
.usua
lly
.vari
es
.from.actu
a-
tion
.to.actu
ation
.as.the.mess
ages
.are.sent.only.aer.comp
eting
.for.and.gain
ing
.acce
ss
.to.the.netw
ork.
.
e.resu
lt
.is.that.the.actu
al
.dela
y
.vari
es
.from.cycl
e
.to.cycl
e,
.whic
h
.not.only.degr
ades
.perf
ormance
.but.
can.driv
e
.the.syst
em
.to.inst
ability.
.In.part
icular,
.the.sens
or
.to.cont
roller
.dela
y
.can.be.time
-stamped,
.so.
the.cont
roller
.can.know.exac
tly
.the.time.inst
ant
.of.the.samp
led
.inst
ance,
.and.from.ther
e,
.calc
ulate
.the.
actu
ation
.valu
e.
.But.the.mess
age
.from.the.cont
roller
.to.the.actu
ator
.can.sue
r
.also.unpr
edictable
.dela
y
.
not.bein
g
.possi
ble
.to.intr
oduce
.it.into.the.cont
rol
.calc
ulation.
.One.possi
ble
.way.to.over
come
.this.situ-
a
tion.and.obtaining.predictability.is.using.the.one-shot.model.[9].where.the.actuation.is.synchronized.
at.the.end.of.the.per
iod.
Another
.impo
rtant
.eec
t
.in.the.NCS.occu
rs
.when.a.mess
age
.is.lost.(the
re
.can.be.seve
ral
.caus
es
.for.
losin
g
.a.mess
age).
.It.is.clea
r
.that.losin
g
.samp
ling
.or.cont
rol
.mess
ages
.may.also.degr
ade
.the.perf
ormance
.
of.the.cont
rolled
.syst
em.
.From.the.cont
rol
.side,.ther
e
.are.die
rent
.stra
tegies
.for.redu
cing
.the.eec
ts
.of.
lost.mess
ages,
.whil
e
.from.the.comm
unication
.syst
ems
.side,.some.kind.of.redu
ndancy
.can.be.used.in.
high
-integrity
.syst
ems.
.One.of.the.used.meth
ods
.is.incl
uding
.some.kind.of.obse
rver
.or.pred
ictor
.that.
calc
ulates
.or.pre
dicts
.the.los
t
.val
ue
.[10
].
20.5 Design in NBC
Designing.an.NBC.system.requires.a.careful.work.within.the.areas.of.industrial.communications,.with.
refe
rence
.to.the.netw
ork
.used.and.the.comm
unication
.rela
tionship;
.the.cont
rol
.syst
em
.desig
n
.area
s,
.
with.speci
al
.emph
asis
.on.incl
uding
.the.indu
ced
.netw
ork
.dela
ys
.into.the.desi
gned
.cont
rol
.law;.and.the.real
-
time
.comp
utation
.area
s,
.as.all.the.cont
rol
.task
s,
.toge
ther
.with.othe
r
.task
s
.that.poss
ibly
.use.the.netw
ork,
.are.
to.be.depl
oyed
.in.comp
uting
.plat
forms
.that.shal
l
.ensu
re
.thei
r
.cont
inued
.execu
tion.
© 2011 by Taylor and Francis Group, LLC

Network-Based Control 20-7
20.5.1 Design Constraints in the Network Side
e.main.design.constraints.in.the.network.side.are.the.network.bandwidth.assigned.to.the.controlled.
syst
em,
.the.resu
lting
.samp
ling
.to.actu
ation
.dela
y,
.and.the.prob
ability
.of.mess
age
.drop
s.
.e.assig
ned
.
band
width
.is.used.to.inte
rchange
.mess
ages
.betw
een
.the.sens
or
.node
,
.the.cont
rol
.node
,
.and.the.actu
ator
.
node
.
.On.a.peri
odic
.cont
rol
.mode
l,
.this.band
width
.has.to.prov
ide
.enou
gh
.room.for.at.leas
t
.one.samp
ling
.
mess
age
.and.one.cont
rol
.mess
age
.in.each.cont
rol
.peri
od.
.e.netw
ork
.mess
age
.sche
duler
.has.to.resp
ect
.
all.of.the.cont
rol
.loop
s
.timi
ng
.cons
traints,
.each.one.with.its.own.samp
ling
.peri
od.
.Depe
nding
.on.the.
type.of.acce
ss
.sche
me
.and.comm
unication
.rela
tionship,
.the.assig
nment
.of.loop.band
width
.can.beco
me
.
cruc
ial
.in.the.res
ulting
.net
work
.ind
uced
.del
ay.
20.5.2 Design Constraints in the Control Side
In.the.control.side,.the.constraints.are.mainly.given.by.the.dynamic.response.of.the.controlled.system..
e.dyna
mic
.resp
onse,
.also.know
n
.as.the.cont
rol
.syst
em
.band
width,
.can.be.expr
essed
.as.the.rang
e
.of.
freq
uencies
.the.cont
rol
.syst
em
.is.able.to.comp
ensate
.and.is.dire
ctly
.rela
ted
.to.the.char
acteristic
.poly
no-
mial
.of.the.clos
ed-loop
.syst
em.
.is.cont
rol
.band
width,
.toget
her
.with.the.samp
ling
.theo
rem,
.expr
esses
.
the.rang
e
.of.samp
ling
.peri
ods
.that.can.be.chos
en
.for.the.disc
retized
.cont
rol
.law..e.appl
ication
.of.the.
samp
ling
.theo
rem
.to.a.disc
rete
.cont
rol
.syst
em
.allo
ws
.to.foll
ow
.one.of.the.acce
pted
.rule.of.thumb.that.
stat
es
.that.the.samp
ling
.freq
uency
.shou
ld
.be.4–20.time
s
.the.syst
em’s
.cont
rol
.band
width.
.e.resu
lt
.is.
that.ther
e
.is.some.exi
bility
.in.sele
cting
.the.cont
rol
.peri
od
.T..Samp
ling
.fast.(sma
ll
.T).usua
lly
.allo
ws
.
bett
er
.perf
ormance,
.but.requ
ires
.the.use.of.more.comm
unication
.band
width.
.Slow.samp
ling
.(larg
e
.T).
degr
ades
. the. cont
rol
. perf
ormance,
.but.redu
ces
. the.netw
ork
.usag
e.
.A. trad
e-o
. must.be.consi
dered
.
betw
een
.the.com
mon
.res
ource
.usa
ge
.(ne
twork
.ban
dwidth)
.and.the.con
trol
.per
formance.
20.5.3 Network and Control Co-Design
From.the.above.constraints,.it.naturally.appears.the.consideration.of.co-design.of.the.network.and.the.
cont
rol.
.e.assig
nment
.of.the.mess
age
.sche
duling
.and.the.cont
rol
.law.desig
n
.is.done.in.para
llel
.as.
each.one.of.the.indi
cators
.depe
nds
.on.the.othe
rs.
.e.cont
rol
.law.can.incl
ude
.some.esti
mations
.of.the.
samp
ling
.to.act
uation
.del
ays,
.the.con
trol
.per
iod
.can.be.cho
sen
.dep
ending
.on.the.net
work
.con
ditions.
In
.addi
tion,
.othe
r
.consi
derations
.and.para
digms
.can.be.appl
ied.
.e.prec
eding
.trig
gering
.sche
me
.
for.the.cont
rol
.loop.exec
ution
.is.base
d
.on.a.cons
tant
.time.base
,
.it.is.time.trig
gered.
.is.sche
me
.has.
been.prov
ed
.to.be.quit
e
.eci
ent
.for.cont
inuous
.signa
ls,
.so.the.resu
lt
.is.pred
ictable
.and.dete
rministic,
.
but.dela
ys
.are.larg
e.
.An.alte
rnative
.is.to.use.an.even
t-trigger
.para
digm.
.In.this.case,.the.cont
rol
.mess
ages
.
are.trig
gered
.by.the.occu
rrence
.of.even
ts,
.e.g.,.when.a.pert
urbation
.prod
uces
.a.cont
rol
.erro
r
.[11]
.
.is.
sche
me
.is.quit
e
.eci
ent
.for.disc
rete
.signa
ls
.as.netw
ork
.band
width
.is.used.when.it.is.nece
ssary,
.but.
redu
ced
.when.the.cont
rolled
.syst
em
.is.stat
ionary.
.e.draw
back
.of.this.sche
me
.is.that
,
.alth
ough
.dela
ys
.
are.low.in.aver
age,
.it.is.neit
her
.pred
ictable
.nor.dete
rministic.
.Guar
anteeing
.the.stab
ility
.and.perf
or-
mance
.of.tho
se
.eve
nt-driven
.sys
tems
.req
uires
.res
earch
.and.app
lied
.eo
rt
.[12
,13].
20.6 Summary
NBC.systems. are.control.and. communication. systems. where. messages. are. used. to.close. the. loops.
betw
een
.sens
ors,
.cont
roller,
.and.actu
ator
.node
s
.thro
ugh
.a.shar
ed,
.band
-limited,
.digi
tal
.comm
unication
.
netw
ork.
.Desig
ning
.this.kind.of.syst
em
.invo
lves
.the.inte
gration
.of.the.disc
iplines
.of.digi
tal
.comm
uni-
cations,
.cont
rol
.desig
n,
.and.real
-time
.comp
uting.
.In.this.chapt
er,
.we.have.show
n
.the.arch
itectures
.for.
NBC.syst
ems,
.the.conc
epts
.asso
ciated
.with.the.netw
ork
.side.seen.from.the.cont
rol
.side,.the.conc
epts
.
rela
ted
.to.the.cont
rol
.side.seen.from.the.netw
ork
.side,.and.the.prin
cipal
.para
digms
.and.cons
traints
.for.
desig
ning
.an.NBC.syst
em.
.is.NBC.chapt
er
.aims.to.prov
ide
.a.desc
ription
.not.only.of.the.fund
amental
.
aspe
cts
.in.thi
s
.pra
ctical
.are
a
.but.als
o
.whe
re
.som
e
.of.the.pri
ncipal
.res
earch
.dir
ections
.lie
.
© 2011 by Taylor and Francis Group, LLC