Werner Leonhard Control of Electrical Drives
Подождите немного. Документ загружается.

260
12.
Control
of
Induction
Motor
Drives
12
.2.2
Acquisition
of
Flux
Signals
Clearly, having up-to-date information
on
the
magnitude
and
phase
of
the
fundamental
fl.ux
wave
is
of
paramount
importance
since
this
is
the
basis
or
c
oordinate
transformation, leading to decoupled control of
the
currents
1
13
37,L7].
For
obtaining
a frequency-independent
fl.ux
measurement one could at-
t.(:mpt
to
measure
the
fl.ux
density in
the
airgap
of
the
machine directly by
p
la
ocing
suitably
spaced magneto-galvanic or magneto-resistive devices such
;lS
I{
all- sensors on
the
face of
stator
teethj by
interpolating
the
local samples
01'
llux density,
an
estimate of
the
magnitude
and
position of
the
airgap
fl.ux
IVa
ve
could be obtained.
Then
by adding a volt age component proportional
e
j
t.()
Lhe
stator
current vector, a signal representing
the
rotor
flux
'!f
or
the
f
R
11l<tf!:lletising
current
1 R would result, Eq. (12.22). However,
apart
from
the
m
"'tcl.
that
the
tiny
Hall sensors are mechanically fragile devices
that
would
"o\.
sta
nd up very well
under
severe vibrations
and
thermal
stress,
there
are
hrg(
: harmonics caused by
the
rotor
slots,
the
frequencies of which change
IV
i til speed.
This
calls for
adjustable
filters
that
would
be
difficult
to
design,
I ';trl.icularly
under
the
condition of zero phase shift. AIso,
the
torque signal
"olllputed from this information
is
likely
to
be unreliable since torque is a
';
lIlface-re
lated
integral
quantity
which
is
difficult
to
estimate
on
the
basis of
:t
r"w
local field measurements. Another disadvantage of
this
scheme
is
that
!.II<'
IIlO(
oor would have to
be
fitted with these sensors, so
that
it
would no
I" '
I/';('!"
!lI: a
standard
motor
that
could easily be exchanged for
another
motor
1.:..1\"11
rrmll
stock.
'I 'I
II'
;'o
di
vc
semiconductor elements
in
the
motor
could be avoided while
;
,.1.
LI",
';;
'"W
time suppressing
the
undesirable slot harmonics,
if
sensing coils
11
11.\1
1111'. a
widt.il
equal
to
full pole pitch would be installed in
the
stator,
for
,.
x
II
III
pJ.o
cllclosed in
the
wedges covering
the
stator
slotsj this geometrically
illl.
n s
til<'
d isturbances by
the
rotor
slots
and
produces signals proportional
1.
..
IIII
X
('!ta
ollge which, after integration, could serve as a measure
ofthe
main
1111
x. 1\
J'
;
a.i
11
lJy
using several sensing coils, displaced
around
the
circumference
,,r
1,
1,,
:
s[.;tLor,
and
adding voltages proportional
to
stator
currents, signals
1"
'1
" "';('
IILillg
rotor flux could be obtained.
'I'
hi
s s
dwrne
was tried in
the
laboratory
[G1,G2]
and
found
to
work well
"OWll
lo
v(:ry
low frequency (> 0.5 Hz), where
the
drift of
the
integrators
'·V"
IIL
lliI.I\y
lJccame
too
largej this limitation prec1udes
the
application of this
::
..
!t(:lII('
to dri
ves
requiring position controI. Again, a special1y prepared
motor
w",ild
llave
(;0
be used.
'I 'h,'
las!;
Ill
cntioned disadvantage
is
avoided by measuring
terminal
volt-
:
'1'
,":;, i
o':o
IlSillf!:
tile
stato
r windings as sensing coi
Is
. This, however, cornplicatcH
1.1
11'
,;
illl:l.Lioll
eve
ll
[llr1.b
er
l)(!
Cél
ll
S
(:
of
tlw
n:sistive volta
ge
dl'op, tilat dllll1"
i,,;!.I
."
:;
a
I.
low
J'n
'
<JIl(
\
lLcy
,
lll(\
llIU
s
l.
hc
(·olllJ)(:II:
;;
t1.(·d
prior to
illt.
q(
ratioll j a
.'i·
Lili '
!i
l
.;
do",. I'<',;i:;1.; I.LII·(' "halll!
;<'
S
wiLh
l<'nq
li'
1'11
1.1\1'1'
Ih
iN
IIH'
I\I
Hll'il;l
~
H
rlH'
IlH
: ClI,O
1""
'
1111
11'
",lIiLl
o
i
ll
v
,.J
v,·d
.
'1'1'
1'1
1.
:1
IV
tl.b,,"1.
~
o
l
·I
III"
'l(
l
l.\lrl
'
(
'
'''II~I(·I
HJ
~I.i
,,"
I
III.\f
I·
j
lld
i
12.2
Contro!
of
Current-fed
Induction
Motor
261
isa
imRa
a
iSb
b
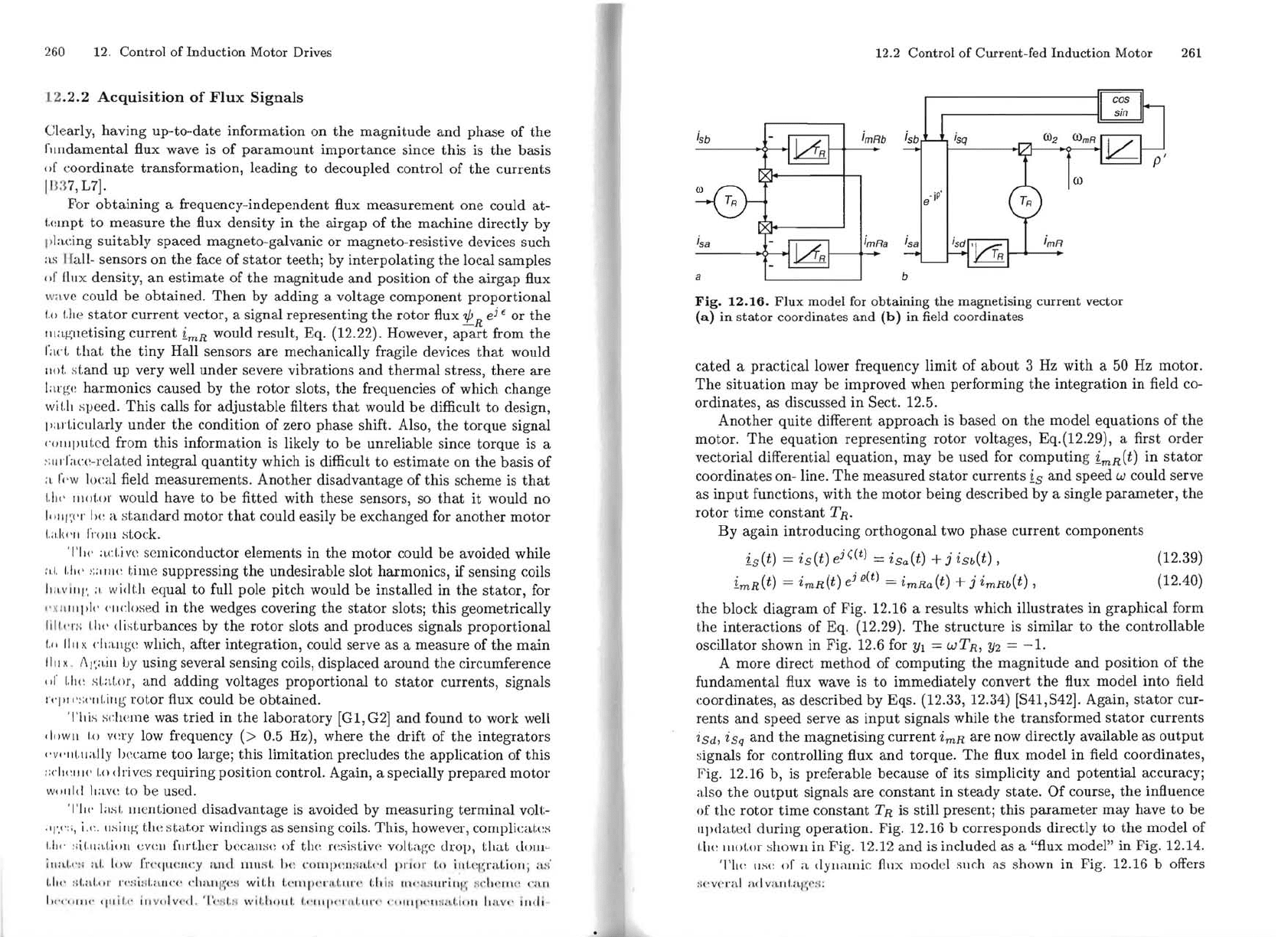
Fig.
12.16.
Flux
mo
de! for
obtaining
the
magnetising
current
vector
(a)
in
stator
coordinates
and
(b)
in
fie!d
coordinates
cated
a
practical
lower frequency limit of
about
3 Hz
with
a 50 Hz motor.
The
situation
may be improved when performing
the
integration in field co-
ordinates, as discussed
in
8ect. 12.5.
Another
quite
different approach
is
based on
the
model equations of
the
motor.
The
equation representing
rotor
voltages, Eq.(12.29), a first
order
vectorial differential equation, may be used for computing 1
m
R(t)
in
stator
coordinates on- line.
The
measured
stator
currents is
and
speed w could serve
as
input
functions, with
the
motor
being described by a single
parameter,
the
rotor
time
constant
TR.
By
again introducing orthogonal two phase current components
ls(t)
=
is(t)
e
j
«t)
= isa(t) +j iSb(t) ,
(12.39)
1
m
R(t) = imR(t) e
j
e(t)
= imRa(t) +j imRb(t) ,
(12.40)
the
block
diagram
of Fig. 12.16 a results which illustrates
in
graphical
form
the interactions of Eq. (12.29).
The
structure
is similar
to
the
controllable
oscillator shown in Fig. 12.6 for
Yl
=
wT
R
, Y2
=-
1.
A more direct
method
of computing
the
magnitude
and
position of
the
fundamental
flux wave
is
to
immediately convert
the
flux model
into
field
coordinates, as described by Eqs. (12.33, 12.34) [841,842). Again,
stator
cur-
rents
and
speed serve as
input
signals while
the
transformed
stator
currents
is
d
,
iS
q
and
the
magnetising
current
i
mR
are
now directly available as
output
signals for controlling
fl.ux
and
torque.
The
fl.ux
model in field coordinates,
Fig. 12.16 b, is preferable because of its simplicity
and
potential
accuracyj
also
the
output
signals
are
constant
in steady
state.
Of
course,
the
infl.uence
of
the
rotor
time
constant
T
R
is still presentj this
parameter
may have
to
be
Ilpdated during
operation
. Fig.
12
.
16
b corresponds directly to
the
model of
lo
l,,
!
IllOtor
showll in Fig. 12.
12
and
is inc1uded as a "flux model" in Fig. 12.14.
TIl<'
IIS(
:
<lI'
a dynamic
flllx
Il10del
slIr.h
as shown
in
Fig. 12.16 b offers
!i(
'v
I'
l'al
;\.(
lv:l.lIl.al
~
I'
~:
262 12.
Control
of
Induction
Motor
Drives
•
Flux
signals
are
not
based on local
measurements
and
are
not
affected by
slot
harmonics
and
stator
resistances,
• Use
of
a
standard
motor
without
additional sensors is possible.
•
Flux
sensing is
operative
down
to
zero frequency, because no
open
ended
integration
is needed which would
be
subject
to
dríft.
•
The
model
immediately generates
the
variables needed for feedback control.
Ilowever,
there
are
stringent
accuracy requirements, for example
with
respect
L()
Lh
e
modulo
27r
integration
of
lIj
this can
best
be
solved by digital com-
)llltation in a microprocessor as will
be
shown later.
The
dependence
of
the
roLor
model
on
the
time
constant
TR
constitutes a source
of
error
because
;\Il
illcorrect
orientation
li'
of
the
flux wave leads
to
undesirable coupling be-
Iwcen
the
d-
and
q-axes
and
could endanger
the
control in field coordinates,
CV(~
lltually
even resulting
in
instability
.
Another
possibility for
obtaining
a flux signal is
the
evaluation
of
the
sta-
Lor
voltage equation, Eq, (10.50), when sensing
the
terminal
voltages
and
cur-
II
I
IIL
5,
However, after eliminating
the
unaccessible
rotor
currents, Eq. (12.45)
n
ls
lllts which contains
the
rotor
flux in derivative form so
that
an
open
ended
illLegration would again
be
necessaryj because
of
the
necessary
isRs-
com-
IWHsation
and
integrator
drift
this
is likely
to
produce
unreliable results
at
low
speed.
This
option is
not
pursued
here,
it
will be
further
discussed in
~;(ICL.
12.5.
1
2.
2.:~
l
<:;
lfects
of
Residual
Lag
of
the
Current
Control
Loops
W11\'11 ex plaining
the
principie
of
control in
fi
eld coordinates, Fig. 12.13,
it
1111
::
1)(,
('
1I
;,
.ssllllled
that
the
stator
windings
are
supplied from perfect
current
::
0111'('(
'
::
, i.(I.
L1tat
the lag
ofthe
current
controlloops
can
be
ignored.
This
calls
1'11
1\ (''v''locollverter or a volt age source converter
with
high frequency pulse-
\Vi
d I.h
1111
)(llllation, allowing
rapid
access
to
the
currents
through
the
reference
1I
1!';lIil.l~;,
as well as
adequate
ceiling volt age
throughout
the
operating
range.
(:I(·;l.Ily
Lhe
seco
nd
condition is in conflict
with
an
economical design
of
the
('(111
wr!.cr uecause
it
would preclude a full utilisation
of
the
available voltage
III
higll speed.
On
the
other
hand,
if
the
lag of the
current
controlled converter
ii:
1I(
,i,
IIq
:
~
ligible,
the
decoupling by
the
inverse model becomes
inaccurate
and
111)(1('siraiJl
e coupling
terms
may
arise which will eventually
render
the
field
ol'J('ll!.al
,
(~d
contro! inoperative;
to
avoid this, two options
are
available:
• IlIdllsioll
of
a l
ea
d-
lag
network with
the
transfer
function
I
"
(.~)
-=
'1'1
S +1
'1'2
<
TI,
(12.41)
T
2
.9 -/-
1 '
iii
1.11(' 1:('/'1'1'1.'11('.(: ch;\IIJid
01'
t.Iw
sLa!.of
('llIT(~H(,
('.(lJl!.J.'o!!oops
.
•
t\ddil.i'llI
(II'
d('I'lllIpfillf:'
(.('1'111::
iII
lidd
(,ool'
dill
:iI,I'
':
,
i.I'.
prior
(,0
t.lH~
l.rau
I:
r'Il
'
llI
liI,i,
'1i1
1111
',0 ill,nl ... r
(·o"ldlllal."
I
i.
12.2
Control
of
Current-fed
Induction
Motor
263
For
the
following
it
is
assumed
that
the
first
approach
has
been
taken
but
that
its
potential
is
exhausted,
leaving a
residuallag
Te
that
cannot
be
reduced
any
furtherj hence
the
second
option
must
be
pursued.
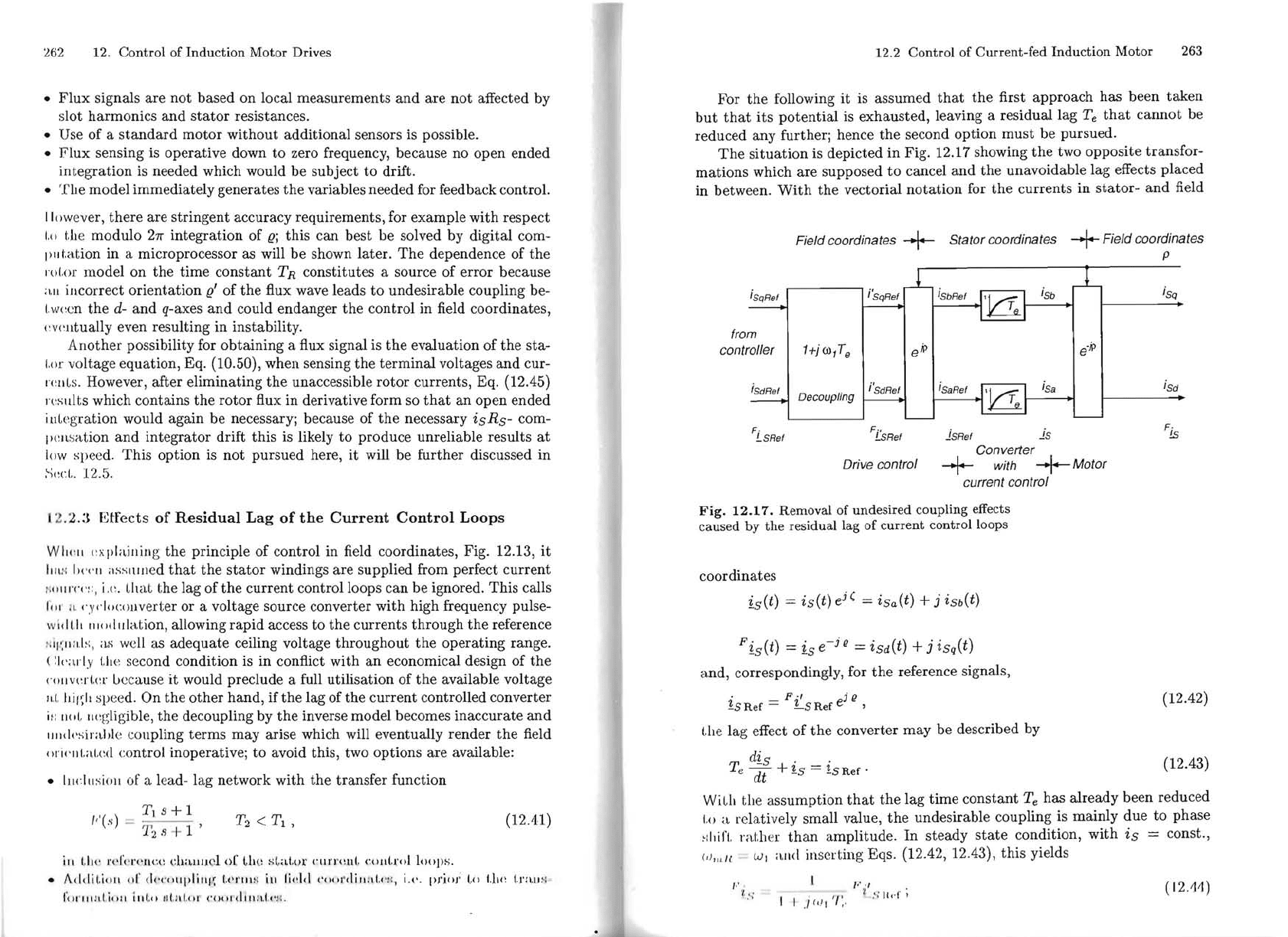
The
situation
is depicted
in
Fig. 12.17 showing
the
two opposite transfor-
mations
which
are
supposed
to
cancel
and
the
unavoidable lag effects placed
in
between.
With
the
vectorial
notation
for
the
currents
in
stator-
and
field
Field coordinates + Stator coordinates + Field coordinates
p
iSqRef I
I
i'SqRef
II
iSbRef
~
iSb
from
Ie'
jp
jp
controlfer
1+j
w
l
T
e
e
iSaRef
~
isa
i'SdRef
iSdRef
Decoupling
i
sq
iSd
F·
F·,
F·
LSRef
LSRef
JSRef
Js
!s
Converter
Drive contrai
+ with + Motor
current control
Fig.
12.17.
Removal of
undesired
coupling effects
caused
by
the
residual lag
of
current
control loops
coordinates
is(t)
=
is(t)
eH
=iSa(t) +j iSb(t)
F
is(t)
=is
e-
j
(!
=iSd(t) +j isq(t)
and, correspondingly, for
the
reference signals,
. F ·' j
(!
(12.42)
lSRef
=
LSRef
e
lhe
lag effect
of
the
converter
may
be
described by
dis
. .
(12.43)
T
e
dI
+15 =15
Ref
.
WiLh
the
assumption
that
the
lag
time
constant
Te
has
already been reduced
Lo
a relatively small vai ue,
the
undesirable coupling is mainly
due
to
phase
Hh
ir!.
ra.
t.h
er
than
amplitude.
ln
steady
state
condition,
with
is
= const.,
(,!",/(
('-'I
and
ins
ert
ing Eqs. (12.42, 12.43),
this
yields
,..
./
"'
,
( 12.11)
'1
,,'\
1. -"
Ikf
I 1
.i
I.!
I 'I:.
264
12.
Control of Induction Motor Drives
when specifying a decoupled transmission,
F·
I F ·
'!.s
~
!SRef'
Lhe
res
ult
is
F 'I
(1'
T)F.
Ls
Ref
= + J
Wl
e
!S
Ref
.
,(,his
means
that
corrective
terms
should
be
applied
to
the
output
signals
of
I.he
controllers.
Written
in
orthogonal
components,
this
calls for
LSdRef
=
!SdRef
-
Wl
Te
iSqRef,
Ls
q
Ref
=
is
q
Ref
+
Wl
Te
is
d
Ref
.
Th
e
practical
realisation
of
this
additive
correction is
quite
easy since
DC
sig-
Ilals
are
involved in
steady
state.
For simplification,
the
speed signal W
may
Iw
used
instead
of
Wl
with
low slip motors.
ln
view
of
the
limited
ceiling volt-
age
of
the
converter,
the
residuallag
Te
of
the
current
controlloops
is likely
to
increase
with
the
stator
frequency
but
if
the
control
is
implemented
in
a
IlIir.rocomputer, this effect can be offset by varying
the
decoupling
parameter
'I;. as
the
speed changes.
The
rating
of
the
converter is
determined
by
the
specified values
of
stator
volt
ag
es,
currents
and
frequency. After
eliminating
the
rotor
current
from
I
';
qs. (10.50, 12.22),
the
stator
volt age reads
.
ilis
ili
mR
II
.
,>'
(/.)
=
Rs!s
+ u
Ls
dt
+
(1-
u)
Ls
dt
.
(12.45)
111
::
I.
c'
ady s
t.
a
te
condition, i.e.
with
constant
speed
and
sinusoidal currents,
1,1,,"1
=
Wl,
is
= const ,
imR
= const.,
11('11
C'C'
I,,:
;
(t
) =
(Rs
+ j
Wl
U
Ls}is
+ j
Wl
(1-
u)
Ls
i
mR
.
(12.46)
'I 'his (:()lIflrms
that
the
fundamental
component
of
the
stator
volt age rises
with
rr('<jl\c~nc:y,
Fig. 12.3 b.
When
the
available voltage
range
is near1y
exhausted
:d,
the
fr
equency WlO - some
margin
must
be left for control - a
further
illc['(
~
a
s
c
o
E"
the
sp
eed is only possible by reducing
the
magnetising
current
,
ic',
iJy
fidd w
ea
kening,
This
can
be achieved
with
•
:1.11
OpClJ
loop scheme employing a speed
depend
e
nt
reference
imRRer(w)
a
~
t
dlOWIJ
iII
Fi~
.
12
.1401'
•
:1.1\
ô\.lI
x
il
i
ary
("()lJlrollooJl
whidl
lilllits
Lhe
1J1
I\
f'
;J
lil.1Jde
of
th
e s
lalor
v()ll.agc
~
hy
J'(
'
cllI<:iIl,~
I.II(
~
flme r c fer C
lJc
:c '
i",.{l/i"J
;
il
silJlílllr
Ii
dwll\(: h:\,n
c
:
arlí(
~ I
'
1)
('1"'
11
clC'
H
e'I'i1lC'd
for
I){:
1I1:u,ltinc
'H,
I,'i"
, 7.
1:\
12,2 Control of Current-fed Induction Motor
265
When
the
field is reduced,
the
ceiling voltage
of
the
converter
should
nor-
mally be fully utilised,
resulting
in
gradual
cessation
of
pulse-width
modula-
tion
so
that
each leg
of
the
converter eventually
produces
square
wave
output
volt ages, Fig. 11.6.
The
stator
currents
would
then
be no longer sinusoidal
but
the
field
orientated
control
still
remains
functioning as
the
computation
of
the
flux
and
th
e
magnetising
current
is
based
on
the
measured
stator
currents, Because
of
the
limited
voltage
and
stator
currents,
the
maximum
torque
is,
of
course,
reduced
in
the
field weakening region, Eq, (10,85).
12.2.4
Digital
Signal
Processing
The
signal processing required for
the
field-orientated control, Fig, 12,14,
as
well
as
the
flux acquisition using a
dynamic
model, Fig. 12.16 b, is
of
consider-
able
complexity;
in
particular,
the
various multipliers
and
function
generators
needed for
the
coordinate
transformation
are
difficult
to
adjust
accurately
when realised
with
analogue
components.
On
the
other
hand,
on-line
digital
control
was economically
impractical
as
long as
it
had
to
be
performed
by
large
and
costly process
computers.
These
obstacles have delayed
widespread
application
of
the
sophisticated
control schemes needed for AC drives [L44].
However,
this
situation
has
changed
dramatically
since digital processors
have now s
hrunk
to
minute
size
thanks
to
the
progress
of
microelectronics.
The
reduction
in volume
and
cost
and
the
advances
in
processing power have
in
the
meanwhile reached a
point
where ali
the
signal processing
required
for
a
high
dynamic
performance
AC drive
can
be
executed by a single micro-
processor which,
together
with
the
associated
peripheral
components,
finds
room
on a
postcard
sized
printed
circuit
board.
The
main
advantage
of
digi-
tal
control
with
microprocessors is
that
the
sarne
standard
hardware
can
be
llsed for
many
different
appli
c
ations
because
the
function of
the
processor
is
determined
by a flexible
and
individually
adaptable
pr
o
gram,
i.e. by soft-
wa
re
; once
the
program
has
be
en
developed
and
verified
it
can
be
duplicated
at
negligible cost
and
transferred
to
a read-only
memory
chip c
onnected
to
Lhe
processor.
A
precondition
for
the
digitalisation of signal processing is,
of
course,
an
ade
quate
resolution of
the
signals
with
respect
to
amplitude
and
time,
Le.
sufficient word
length
and
computing
speed.
The
current
16 bit-processors
are
qllite
satisfactory
from these
points
of view; a 16-bit re
presentation
of
vari-
;
~blc
s
corr
e
sponds
to
an
internal
resolution
of
one
part
in
more
than
65,000;
ir 10-
or
12-
bit
analogue-to-digital converters
are
employed for converting
I.IJ(
~
analogue signals from
the
plant,
such as
stator
currents
or
motor
speed,
I.hc
: d fects
of
quantisation
are usual1y
unnoticeable
even
though
there
are
s
l.il!
exc
c ~
pti
o
n
s
)
when higher
internal
resolution, such as 32
bit,
proves
to
be
llC'
n'
ss
ar
y
wi
th s
om
e va
riabl
es. Most microprocessors still use
integer
valued
IIl'
il.hl\\(:(".l.i("
Inll
, pr
oo
,s
s
or
s witlt
Jloatinr
~
jJoint arit-hmctic
are
becoming
mor
e
{,
<l
I1IIJI"11
IICl
W,
pll.rticlILtrl
.v
ir
1.111'
rOlJtrol
pJ'()l~r;lII1
H
:U
'
('
to Iw writt.c
lI
in
hif
~
h(
~
r
266
12. Control of
Induction
Motor Drives
levellanguage such as in C,
to
make them independent of
the
processor
hard-
wa.re
used. Reduced word length, such as 10 bit, is usualIy
adequate
for
the
I)
IA-converters, i.e.
at
the
output
of
the
microprocessor because
the
DI
A-
converter
is
part
of
the
plant
and
thus
under
the
surveillance of
the
digital
controlIer, whereas errors in
the
AI
D-converter produce false signals.
The
choice of the required resolution in time
is
more complex as
it
depends
1101".
only on
the
type of drive
but
also on
the
particular
function within
the
drive controi. Clearly, when sampling
and
processing non-sinusoidal
currents
h;wing a fundamental frequency of 100 Hz, a higher sampling frequency
is
11("(
~
d
e
d
than
for the digital realisation of speed
or
position control, where
the
ral
.
(~
of change
is
restricted by
the
inertia of
the
drive.
As
long as computa-
I.ioual speed of the processors was a
major
consideration which is no longer
I.
h(
: case with todays microprocessors,
an
advantage could be gained by em-
ploying different sampling periods for
the
different tasks. For example, for
an
('-"qJcrimental 1.5
kW
induction motor servo drive having a
PWM-transistor
power supply
and
an 8086 control unit,
the
folIowing sampling periods proved
cOlllmensurable with fast control transients [841].
a) Sampling period of 1 ms for
AI
D-conversion of
stator
currents
U
pdating
of fiux model
COllversion
to
field-coordinates
Cmrcnt
and
torque control
Couv(~rsion
of
diq-currents to
stator
coordinates
Olll.pUt.
of
current
references
1»
):;aIJlplin~
period of 5 ms for
1,'1,1
x
c01lt.rol
including field weakening
,',
pc
'c
,Ii
control
I'm:il.ioll control
fi
:;il.
1I1
pi
ill[';
time
of 1 ms for
the
stator
currents is
adequate
up
to
a
stator
r""I[IIC
:
llcy
uf
about
100 Hz, when the currents are sampled
and
processed
ten
l
.
illlC'
~:
per periodj
at
this frequency
the
fiux vector
is
computed
at
36° inter-
v:th
wllidl can make
the
use of a simple
extrapolation
scheme desirable. At
::
till
Ili
g
h(
~
r
stator
frequency, faster sampling of
the
variables
is
required. For
I.odays
hi,..;h
dynamic performance servo drives, a sampling period of
100JLs,
('oIT('spollding to a 10 kHz sampling frequency
may
be specifiedj this
can
be
adlil:v(~d
with signal processors. Another possibility are application specific
illl.l'l~ra
.
I,(~d
circuit (A8IC's), where ali the control software
is
incorporated as
I'II
S
t.Olll-
ltardware on special chips, [K34 - K38], [TU].
A
II
illcrelIlenta.1 position sensor as described in Chapo
15
.2 can serve for
:i<'lI::jllf~
i
LJlgular
position as
wdl
as speed; wlwn tlw [orward/reversc pulses
are
II.I
'
c
'
.
1I1111lIat.(
~
d
iII
a
r<~vcrsihlc
cOl.luter, which
is
illiLially s
et
hy
a.
rd(:n~llce
pulse,
LIli' :!.III-,lIla!' pw:itioll o[
lhe
shaft
call
1.1\'
cld,('d,c'd
,II.
1.
11<'
salllpliJlU
illSl.il.lll.
S hy
1.
111'
1'
11
ic
'r"l H'
IlC'
\'
:-lH
OI
',
[<'ol'll1il)
((
!.Ii<'
ditl"
'
I'\'III
'"
II('!.w('I'1I
I.WI)
Hl
rll
H
l'lflWUI.
Nn
lll(d('
N
1"
""icl,'
;!
II
II
14'
11
11
1
lI
'c' "r I,!t.,
II
V('l
lIf,\"
:1
1'1
"
1'01
i
II
1.1'1'
11
11
'
1.
illl
.\
'l'vnl.
~lI.l.lIndl'y,
fI,
1I
12.2 Control of Current-fed
Induction
Motor
267
encoder, delivering
at
any
instant
the
absolute angular position of
the
shaft
would be preferable for speed
and
position sensing as
it
removes
the
ambiguity
with regard
to
initial position,
but
this advantage has
to
be balanced
against
increased cost and complexity.
With
a high resolution incremental
speed/position
sensor producing 8000
increments
per
revolution,
the
speed signal
has
a frequency of 200 kHz
at
the
nominal speed of 1500
1/min
for a 4-pole, 50 Hz motor, Hence a 5 ms
sampling period of
the
speed controlIer results
in
a speed
measurement
of
1000 counts
at
nominal speed
but
correspondingly less
at
lower speed, 8ince
this
is
usualIy
inadequate
with
regard
to
resolution
and
accuracy, a quasi-
analogue sensing scheme providing finer resolution
at
low speed could
be
employed [845,
KU]j
another
option
is
to
convert
the
sensing scheme from
frequency-
to
time-measurements which alIows
better
resolution
at
low speedj
this
is
discussed
in
8ect, 15,2.
The
design of linear sampled
data
control systems is
part
of
the
general
control theory
that
has been exhaustively covered in
the
literaturej
there
is
no lack of proven design methods, e.g,
[43],
A look
at
Figs. 12,13
and
12,14
reveals
that
even
though
the
control plant is highly nonlinear, a considerable
degree of decoupling
and
linearisation is achieved
through
the
method
of
field orientation.
ln
addition,
the
principIe of cascade control, identical to
that
applied
with
DC
drives, serves for consolidation by allowing a step-by-
step
design of
the
control
structure.
All
that
has been said
about
the
design
of controlled
DC
drives, including
the
combination of feed-forward
and
feed-
back control, remains applicable here, because
the
difference between a
DC
and
an
AC drive is, besides
the
changed
parameters,
confined
to
the
block
"Torque
controlloop".
Further
simplification is due
to
the
fact
that
relatively
high sampling frequencies
can
be chosen with a suitable microprocessorj as a
result,
the
control
functions in
the
outer
loops are practically continuous so
that
the
added
complexity of sampled
data
design procedures is avoided.
As
an
example,
the
difference equation of a PID-controller relating
the
sampled
control
error e(v)
to
the
actuating
signal y(v)
may
be
written
in
straight
parallel
form
TV
T 1
(12.47)
y(v)=G
e(v)+Ti~e(JL)+
;[e(v)-e(v-1)],
[
where T
is
the
sampling interval, G
the
controlIer gain
and
Ti, T
d
the
time
collstants of
the
integrating
and
derivative channels respectively.
The
equa-
I.ioll
is
to
be solved
in
real
time
by the microcomputer.
The
integrating
term
would
normally
be
computed
recursively in
the
form
(12.48)
y,
(II)
dlt)
=
:'1
i('/ -
1)\
1'(1/)
.
--
'268
12.
Control
of
Induction
Motor
Drives
lt
is
important
that
all
the
variables are bounded to prevent numerical over-
flow
with
integer arithmetic, or undesirable signal overshoot if floating point
arithmetic
is
employed.
e
Ts
The
discrete transfer function of this controller is,
letting
z = ,
_
Y(z)
_ G
[1
T z T
d
Z -
1]
F
(
z
)
----
+---+---
(12.49)
E(z)
Ti
z-1
T z
\2
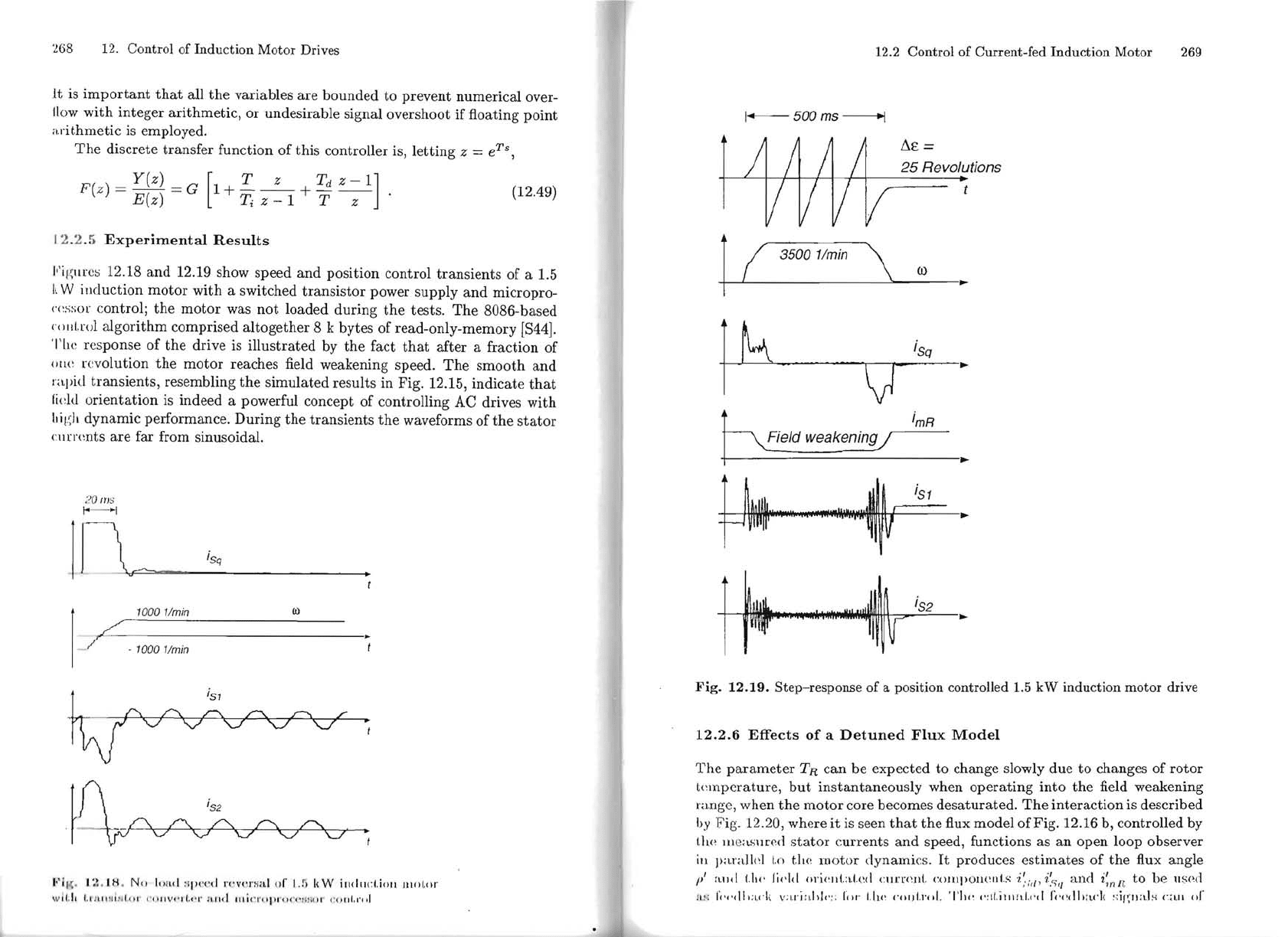
.2.5
Experimental
Results
1"i,;llre~
12.18
and
12.19 show speed
and
position control transients of a 1.5
k W induction
motor
with a switched
transistor
power supply
and
micropro-
('(~ssor
control;
the
motor
was
not
loaded during
the
tests.
The
8086-based
cOlll.rul
algorithm comprised altogether 8 k bytes of read-only-memory
[S44].
'I'lw response of
the
drive is illustrated by
the
fact
that
after a fraction of
(llle
revolution
the
motor
reaches field weakening speed.
The
smooth
and
rapid transients, resembling
the
simulated results in Fig. 12.15, indicate
that
tid<l orientation
is
indeed a powerful concept of controlling AC drives with
liigh dynamic performance. During
the
transients
the
waveforms
of
the
stator
cnr]"(~nts
are far from sinusoidal.
2
0ms
}-o
- - -
'"
i
sq
frL
(ú
10001lmin
/-
.
_ /
·1000
1Imin
.
VV
is,,,
=d
q
C\
/\.
~~
f
~
is,
. A
V
L\
V
A
\J
L"">'J/"""'.\.J
10"
1
1-<.
I'
...
.
IH
.
N,)
IO
~
L
"
>1
1"'('.1
f
('v('r~al
"I" 1.:' I'
,W
illdlldiollllllll.or
wl
LlI
1.'
"
11
1
11
,1
1.'"
, ,·
,,"v,'rl.,·r
lIlI<1
IIli(
'r
"l"u
("'ll
l1
'"
' ('
(IId,r,d
12.2
Control
of
Current-fed
Induction
Motor
269
1-
500 ms
-----I
1j
!l
~
~
~
;eVOlutions
vrvv
i
IL3500 l/min \
ro
•
1
b
~
~
V
iSq
mR
Field weakening./
i
~
liRM'/'
,.,
ln
"i
".wHil\4~'IH
li
,
....
i
S2
~
1"lfIM
••
I
lU."
,:rt
....
..
AIlU\~11I
\
==
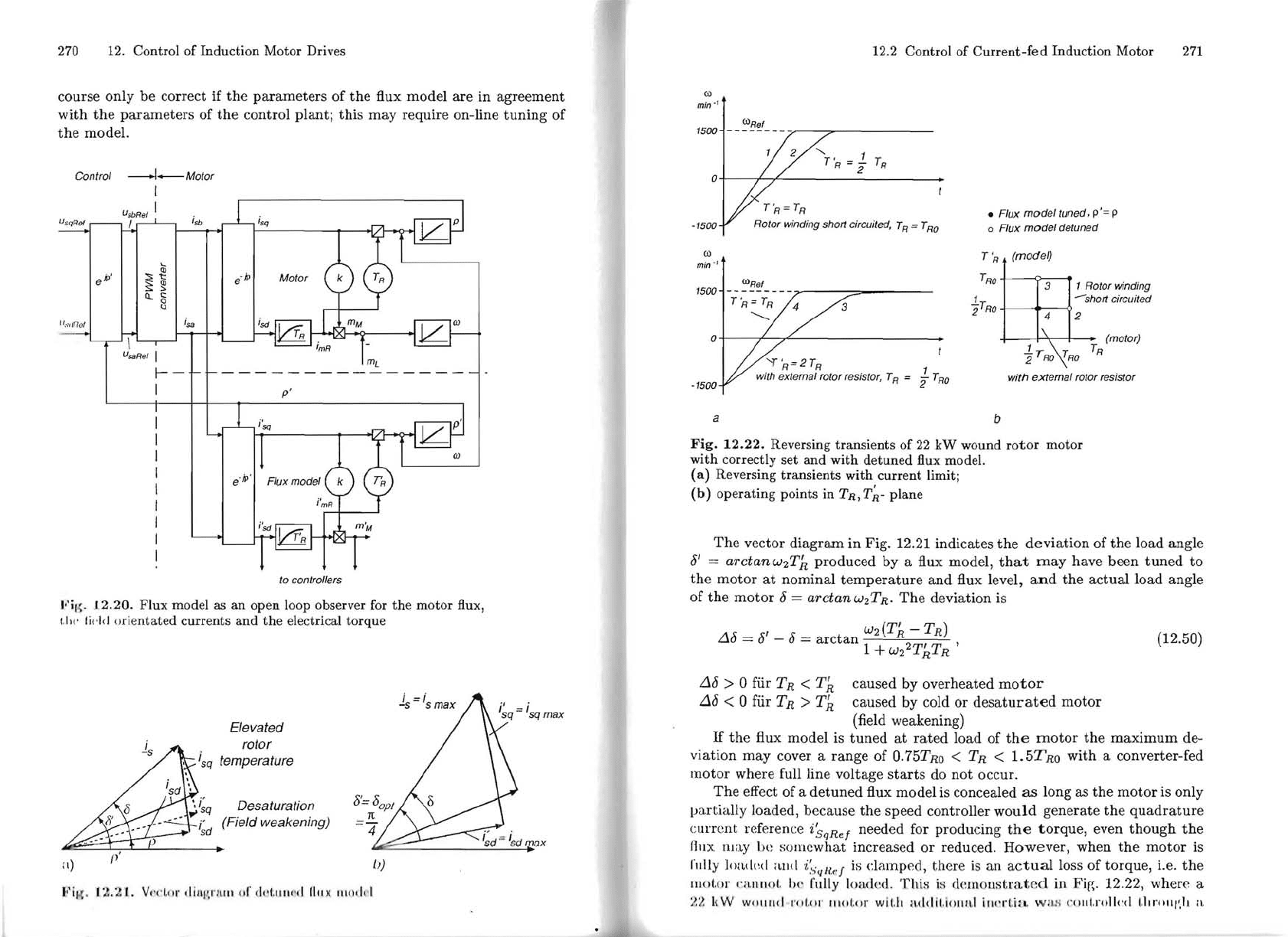
Fig.
12.19.
Step-response
of
a
position
controlled 1.5
kW
induction
motor
drive
12.2.6
Effects
of
a
Detuned
Flux
Model
The
parameter
TR
can
be expected
to
change slowly due
to
changes of
rotor
t(~:nperature,
but
instantaneously when
operating
into
the
field weakening
range, when
the
motor
core becomes desaturated.
The
interaction is described
b.Y
Fig. 12.20, where
it
is seen
that
the
flux model
ofFig.
12.16 b, controlled by
t1w
Ill
c<tsmed
stator
c
urrents
and
speed, functions as
an
open loop observer
iII para)l,,1
to
tlw
motor
dynamics.
It
produces estimates of
the
flux angle
II' .tlid til(' .li('ld
()ri(~"l.;t(.ed
clIrr('JlL
("OJllpOJlCIII.S
"<;t/
,
i~r,tJ
and
i:
nn
to be
mwd
/11-.
j'(
·
(·dl'il,
..
li
viI.rinhl<-:
:
ror
/.Iw
(·ol)!.ro!.
'l'1)(~
,':iI,illlll.l,,'d
(
·(~
dha('1<
:;il';II.t1s
C;~iI
01'
270 12. Control
of
lnduction
Motor
Drives
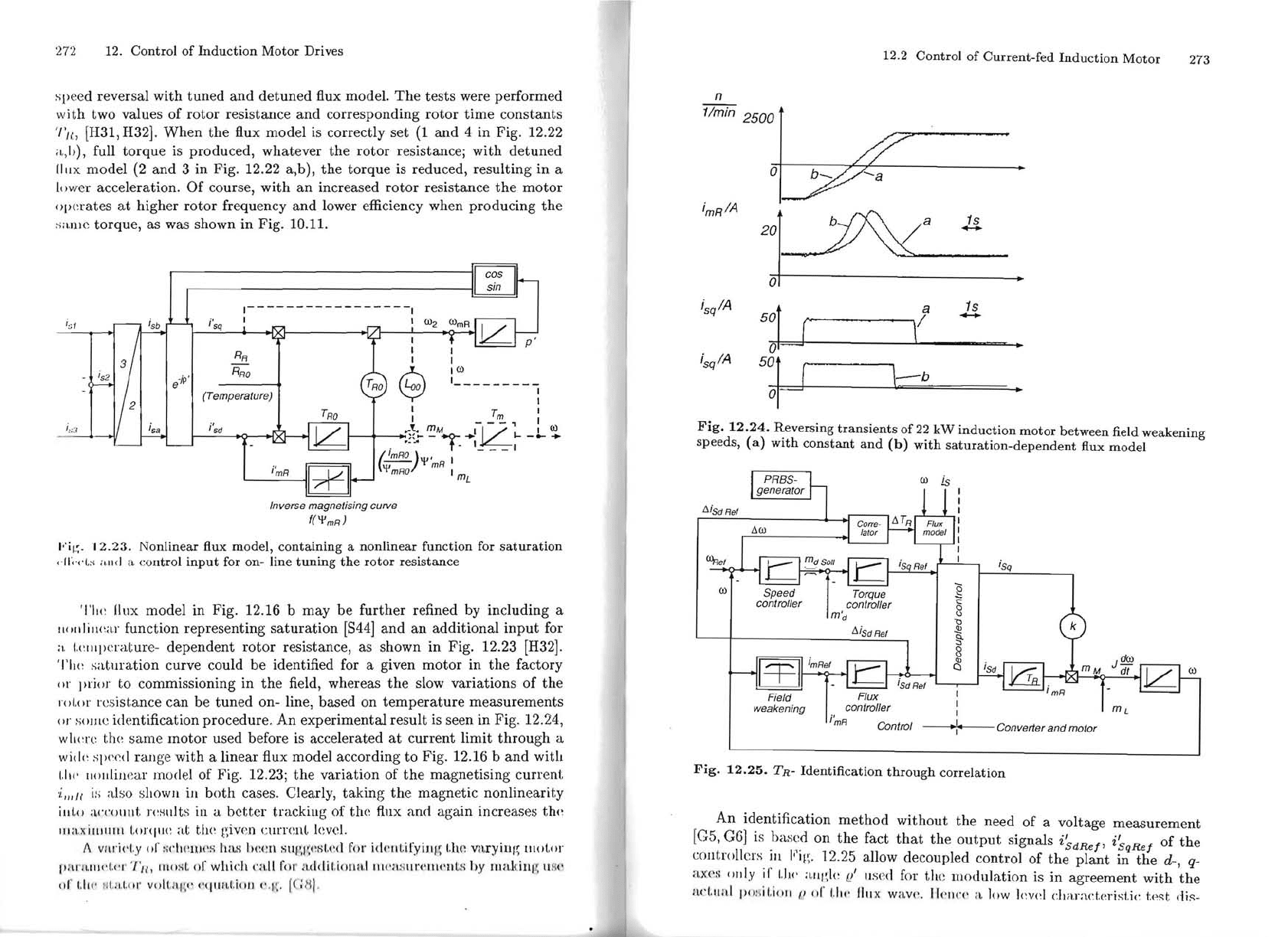
course only
be
correct if
the
parameters
of
the
flux model are in agreement
with
the
parameters
of
the
control plant; this
may
require on-Une
tuning
of
the
model.
C'Ontr'Ol
-l-M'Ot'Or
I
UsbRel I
"~'~Q
iSb
e'
Jp
e~'
I
~
~
Q
c:
o
"
I
isa
!I"lrtn~
L'
\
UsaReI I
1--
I
p'
1'0
c'Onlr'OIIers
Fil
C(
·
12.20.
Flux
model
as
an
open
loop observer for
the
motor
flux,
1.1
... li
,·
ld o
rientated
currents
and
the
electrical
torque
Elevated
rotor
i
Sq
temperature
Desaturation
( (Field weakening)
sd
n)
" li)
FI
l-(
.
I~.
:lI.
VC'No!'
clil~J\I"
I\
1I1
01'
dn
t.lll1c·cI
1111
x '''Cld..!
12.2
Control
of
Current-fed
lnduction
Motor
271
W
min
o'
" /
"
WRe/
1500
T
' - -
1 T
R
R - 2
ai
•
Flux
modeltuned,
p'
=p
·1500
R'Ol'Or
winding
sh'Ol1
circuiled, TR = T
RO
o
Flux
model
deluned
W
T
'R
• (m'Odel)
min-
t
/
,c
3
WRe/
T
RO
lR
'Ol'Or
winding
15'0'0
1
--si
'011
circuiled
'2
TRO
4 2
o I
(m'OI'Or)
ffi
T
R
1
'2
TRO
with
extemal
r'Ol'Or
resisl'Or
·15'00
a
b
Fig.
12.22.
Reversing
transients
of
22
kW
wound
rotor
motor
with
correctly
set
and
with
detuned
flux model.
(a)
Reversing
transients
with
current
limit;
(b)
operating
points
in
TR,
T~-
plane
The
vector
diagram
in Fig. 12.21 indicates
the
deviation
of
the
load
angle
o'
= arctan
w2TR
produced
by
a flux model,
that
may
have been
tuned
to
the
motor
at
nominal
temperature
and
flux leveI,
and
the
actual
load
angle
of
the
motor
o=arctanw2TR.
The
deviation is
w2(T
R
-
T
R
)
.do
=
o'
- o=
arctan
1 +W2
2T
R
R '
(12.50)
T
.do
> O für T
R
< T
R
caused by overheated
motor
.do
< Ofür T
R
> T
R
caused by cold
or
desaturated
motor
(field weakening)
If
the
flux model is
tuned
at
rated
load
of
the
motor
the
maximum
de-
viation
may
cover a
range
of
0.75T
RO
<
TR
< 1.
5TRO
with
a converter-fed
motor
where full line voltage
starts
do
not
occur.
The
effect
of
a
detuned
flux model is concealed
as
long as
the
motor
is
only
partially
loaded, because
the
speed controller
would
generate
the
quadrature
c
urrent
reference iSqRef needed for producing
the
torque,
even
though
the
nux
may
be
somewhat increased
or
reduced.
However,
when
the
motor
is
flllly
Jond(~d
iLlul
<'
.;
,,/I.,.!
ifi
damped,
there is
an
actualloss
of
torque, i.e.
the
lll
(l
l.or
'"
ILIl
IIOI.
1)('
flllly
load(~d.
This
is
dernollstrated
in
Fi~.
12.22, where a
22
kW
W()llfld
1'101,(11
' /l1C.l.or wil.h a
dd
il,joll/l.l
i/l<'l'l.ia
W fU, cOlIl.roll(·c!
t1lf'(l1lf~h
n
273
272 12. Control
of
Induction
Motor
Drives
speed reversal with tuned and detuned flux model.
The
tests were performed
with two values of rotor resistance
and
corresponding
rotor
time
constants
Tu, [H31, H32).
When
the
flux mo deI
is
correctly set
(1
and 4 in Fig. 12.22
;~,IJ),
full
torque
is
produced, whatever
the
rotor
resistancej with detuned
(11Ix
model
(2
and
3 in Fig. 12.22 a,b),
the
torque is reduced, resulting in a
[ower acceleration.
Of
course,
with
an
increased
rotor
resistance
the
motor
opcrates
at
higher
rotor
frequency
and
lower efficiency when producing
the
sa
IllC
torque, as was shown in Fig. 10.11.
I----------------~
I I
i:;
1
iSb
í'sq
RR
RRO
e'
jp
'
(Temperature)
I I
T
RO
._t.
- m
mM
I
j'Sd
ísa
i"
3
I
im:~:)::-
-
t-
+i
l2..
~
-L
~
Fl'mRO 'I"mR I - - - I
i'mR
I
mL
Inverse magnetising curve
(('I'
mR)
1"il',.12.23.
Nonlinear flux model, containing a nonlinear function for
saturation
..11','<"1,
,,
;
,.11<1
a control
input
for on- line
tuning
the
rotor
resistance
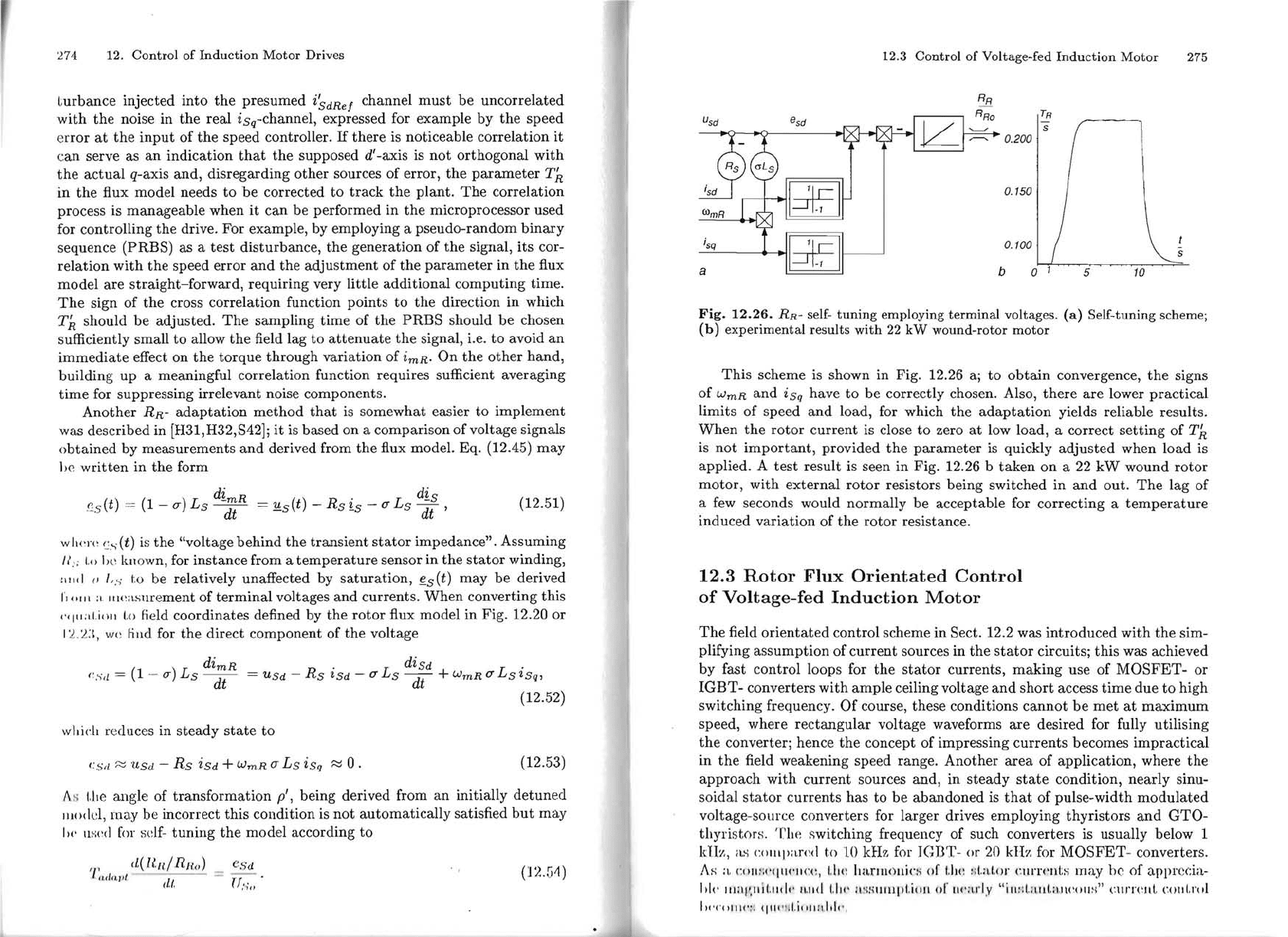
'I'hc
flux
mo dei in Fig. 12.16 b may
be
further refined by including a
110111 i
upar
function representing
saturation
[844)
and
an
additional
input
for
a
(.(
~
lllpcrature-
dependent
rotor
resistance, as shown in Fig. 12.23 [H32).
'I'lw
saturation
curve could
be
identified for a given
motor
in
the
factory
<ll'
prior to commissioning in
the
field, whereas
the
slow variations
of
the
I(
II.(
n'
rcsist,ance can be tuned on- line, based on
temperature
measurements
or
sOlJle idcntification procedure. An experimental result is seen in Fig. 12.24,
w
lIcrc
t.h(~
sarne
motor
used before is accelerated
at
current limit
through
a
wid(~
sp(~(
~
d
range with a linear flux model according to Fig. 12.16 b and with
1.11<'
lIolllin
ea
r model of Fig. 12.23j
the
variation of
the
magnetising current
i,,,
11
i:
; also sllowlI
ia
both
cases. Clearly,
taking
the
magnetic nonlinearity
illl.o
;Lc'('Ollllt. l'<'HlIltS in a bel;ter trackillg of tlw
fillx
and again increases th('
lI"
lx
illllllll lorqu(:
at
tiw
given
currenllevel.
1\
vll,riC'l.y
01'
:;r!I<'IIWS
has
IIc:(
:
1\
SIlC,J
{(
::-;
(.('c\
for
idclIl.il'yiJl
g
I.hc
varyinl',
lllo(.or
P:
l.
f'I'
l.lIwl
r
.('I' '['u,
11i'(I
S
l.
01'
whidl
ndl
fo
I'
n(ldiI.iOllH.llllc'
~ I
S
lll'f'lIlC'lIl
s
hy
IIll\,kill
~
II/i('
"r
i.I
tt' Il
l.n
l.,
li
'
voll.
l
lf
'\
'·
<"fi
II
iI.U",
II.
('
.
r,.
IC:
~I
.
I T I
12.2 Control
of
Current-fed
Induction
Motor
n
1/min
2S00
ímR/A
isq/A
a 18si
o
[
.
\
/
.....
aI
ísq/A
5:~
\-b
_.
Fig.
12.24.
Reversing
transients
of
22
kW
induction
motor
between field weakening
speeds,
(a)
with
constant
and
(b)
with
saturation-dependent
flux model
MS
dRe
'
~e'
úl
Speed
control/er
Field
weakening
Torque
control/er
m'd
MS
dRe
'
e
§
]l
§}
8
~
i'mR
Contrai
•:• Converter
and
motor
Fig.
12.25.
TR- Identification
through
correlation
An identification
method
without
the
need
of
a voltage measurement
[G5,
GG)
is
ba
sed
on
the
fact
that
the
output
signals iSdRef' iSqRef
of
the
controllcrs
iII
Ji'if~·
12.25
a.llow
decoupled control
of
the
plant
in
the
d-,
q_
il)((~0
CJlIly
ir
I.hc
'
;U
ll(\(~
fi
lls(~d
for the
modulation
is
in
agreement
with
the
H.C'I.II
:d
pCl:
lil.iClII I'
C1i'
I.h,'
f1l1x
wav('.
1I"II('c'
;1.
\ow
\cvd
dlil.r;\.d.eristic:
tc-~st
dis-.
274
12.
Control
of
Induction
Motor
Drives
Lurbance injected
into
the
presumed
iSdRef
channel
must
be uncorrelated
with
the
noise in
the
real isq-channel, expressed for example by
the
speed
error
at
the
input
of
the
speed controller.
If
there
is
noticeable correlation it
c
an
serve as
an
indication
that
the
supposed d'-axis
is
not
orthogonal
with
the
actual
q-axis and, disregarding other sources of error,
the
parameter
T.k
in
the
flux model needs
to
be
corrected
to
track
the
planto
The
correlation
process is manageable when it
can
be performed in
the
microprocessor used
for controlling the drive. For example, by employing a pseudo-random
binary
sequence (PRBS) as a
test
disturbance,
the
generation of
the
signal,
its
cor-
relation
with
the
speed
error
and
the
adjustment
of
the
parameter
in
the
flux
model
are
straight-forward,
requiring very little additional computing time.
The
sign of
the
cross correlation function points
to
the
direction in which
T.k
should be adjusted.
The
sampling
time
of
the
PRBS
should be chosen
sufficiently small
to
allow
the
field lag
to
attenuate
the
signal, i.e.
to
avoid
an
immediate
effect on
the
torque through variation of
imR'
On
the
other
hand,
building
up
a meaningful correlation function requires sufficient averaging
time
for suppressing irrelevant noise components.
Another
RR-
adaptation
method
that
is
somewhat easier
to
implement
was described in [H31,H32,S42];
it
is
based
On
a comparison
of
volt age signals
obtained
by measurements
and
derived from
the
flux model.
Eq
. (12.45)
may
1>
e
written
in
the
form
di.mR
()
R'
L di.s
(
5,5
()
t =
(
1 -
(J"
)
L S
~
=
l!s
t - s
:?os
- (J' S
dt
'
(12.51)
w
hcn
~
c.
dt)
is
the
"volt age
behind
the
transient
stator
impedance". Assuming
/l .,;
to
i>
c kllown, for instance from a
temperature
senSor in
the
stator
winding,
"".!
(/
/' S
to
be relatively unaffected by
saturation,
~
s
(t)
may be derived
ri
(" II a
111(
~
a
S
llrement
of
terminal
volt ages
and
currentS.
When
converting this
(·
qll
i
tl
.
ioll
lo
field coordinates defined by
the
rotor
flux mo dei in Fig. 12.20 or
1
'L.
'2
:1
, wc nnd for
the
direct component
of
the
volt age
dimR
.
disd
.
Co
d =
(
1 - (J"
)
L s
--
= USd -
Rs
tSd
- (J'
Ls
--
+
WmR
(J' L s
ts
q
,
. & &
(12.52)
wlaiell reduces in steady
state
to
CSrl
~
'USd
-
Rs
iSd
+WmR (J" Ls
iS
q
:::::J
O.
(12.53)
tu; I.be angle of transformation p', being derived from an initially
detuned
JllOdd,
rnay be incorrect this condition
is
not
automatically
satisfied
but
may
1)('
Ils(~d
for
sdf-
tuning
the
model according
to
, ,
(I(UII;Rj{
u) _ CSd
(12.Gt1)
/",<l",!,1
II
-
fi,.
("
, '
'lf
l
12.3
Control
of
Voltage-fed
Induction
Motor
275
RR
TR
s
0.200
0.150
0.100
s
o j
5
10
Fig.
12.26.
Rw
self-
tuning
employing
terminal
voltages.
(a)
Self-tuning
schem
ej
(b)
experimental
results
with
22
kW
wound-rotor
motor
This
scheme
is
shown in Fig.
12
.
26
a;
to
obtain
convergence,
the
signs
of
WmR
and
iS
q
have
to
be correctly chosen. AIso,
there
are
lower
practical
limits
of
speed
and
load, for which
the
adaptation
yields reliable results.
When
the
rotor
current
is
dose
to
zero
at
low load, a correct
setting
of
T.k
is
not
important
, provided
the
parameter
is
quickly
adjusted
when
load
is
applied. A
test
result is seen in Fig.
12
.
26
b
taken
on
a
22
kW
wound
rotor
motor,
with
external
rotor
resistors being switched in
and
out.
The
lag of
a
few
seconds would normally
be
acceptable for correcting a
temperature
induced variation
of
the
rotor resistance.
12.3
Rotor
FIux
Orientated
ControI
of
Voltage-fed
Induction
Motor
The
field
orientated
control scheme in Sect. 12.2 was introduced with
the
sim-
plifying
assumption
of
current
sources in
the
stator
circuits; this was achieved
by fast cOntrol loops for
the
stator
currents,
making
use
of
MOSFET-
or
IGBT-
converters with ample ceiling voltage
and
short
access
time
due
to
high
switching frequency.
Of
course, these conditions
cannot
be
met
at
maximum
speed, where
rectangular
volt age waveforms are desired for fully utilising
the
converter; hence
the
concept of impressing
currents
becomes impractical
in
the
field weakening speed range. Another
area
of application, where
the
approach
with
current
sources and, in
steady
state
condition, nearly sinu-
soidal
stator
currents
has
to
be abandoned
is
that
of pulse-width
modulated
voltage-soUl'ce converters for larger drives employing
thyristors
and
GTO-
thyri
stor
s.
Tlt
e
fi
witching frequency of such converters is usually below 1
kU'l"
as
colllJlar<
~
d
t.o
10
kHz for IGBT-
or
20
kH'l,
for
MOSFET-
converters.
A s
;t.
C
()Jl
:;
('(l'l('ll
C
(
~,
t1w
ltanllOlli('s
of
t.lw :;t.nt.oj' nllT('llts may bc
af
appr
c
ci
a-
1.1(,
111
1
11',11
\1.
11.1"
tl.lld
1.1)('
lI'if
illllll't
.
iotl
01'
II<':t.t'I.v
"ill
::
I.
I
IIII
.i
lllCOll
:;
"
(·
.
\lrl'(
~
llt
('.o!ll.rol
1"'("1111"
::
qll'
·l
l
l.i""
II.
loI
',',
276
12.
Control
of
Induction
Motor
Drives
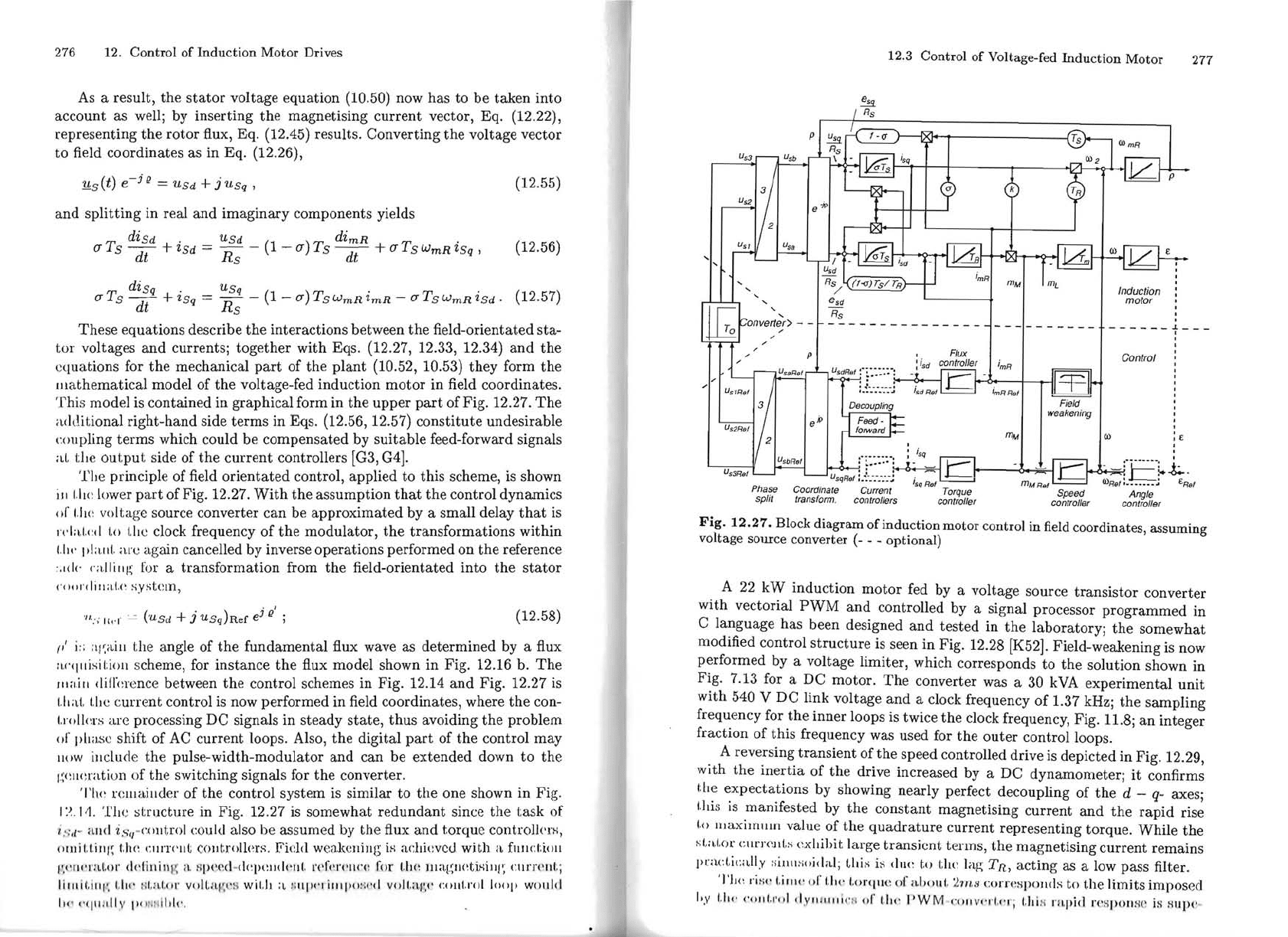
As
a result,
the
stator
voItage equation (10.50) now has
to
be
taken
into
account as well; by inserting the magnetising current vector, Eq. (12.22),
representing
the
rotor flux, Eq. (12.45) results. Converting
the
volt age vector
to
field coordinates as in
Eq
. (12.26),
-j
(2
•
Y,s
(t)
e =
USd
+J
uS
q
,
(12.55)
and
splitting
in real
and
imaginary
components yields
disd
USd
dimR
.
(JTs
di
+
iSd
=
Rs
-
(1
- (J)
Ts
~
+
(JTSWmR
ZSq
,
(12.56)
dis
q
.
uS
q
()'
. ( )
(J
T
S
di
+
ZSq
=
Rs
- 1 -
(J
Ts
WmR
ZmR
-
(J
Ts
WmR
ZSd . 12.57
These
equations describe
the
interactions between
the
field-orientated sta-
tor
volt ages
and
currents;
together
with Eqs. (12.27, 12.33,
12
.34)
and
the
equations for
the
mechanical
part
of
the
plant
(10.52, 10.53) they form
the
mathematical
model of
the
voltage-fed induction
motor
in field coordinates.
Thi
s model is contained iu graphical form in
the
upper
part
of Fig. 12.27.
The
additional right-hand si de
terms
in Eqs. (12.56, 12.57)
constitute
undesirable
coupling
terms
which could be compensated by suitable feed-forward signals
aL
tI.e
output
side of
the
current
controllers [G3, G4].
The
principie of field orientated control, applied to this scheme, is shown
iII
I.
h(
! lower
part
of Fig. 12.27.
With
the
assumption
that
the
control dynamics
01'
I.
II<!
voltagc source converter can be
approximated
by a small delay
that
is
rda
.
I.I
!
.!
Lo
Lhe
clock frequency
of
the
modulator,
the
transformations within
1.11\'
pLud
.
are
again cancelled by inverse operations performed
ou
the
reference
:.Idl·
(;
t.llillg
for
a
transformation
from
the
field-orientated into
the
stator
(<I"r,lillal.l'
~
;yst
e
m
,
'
/1.:;
11<'1
'-= (-USd +j
USq)Ref
e
j
(2'
;
(12.58)
I'
I:
:
;
1I
~aill
the angle of
the
fundamental flux wave as determined by a flux
iI,('([llisitiOll
scheme, for instance
the
flux model shown in Fig. 12.16 b.
The
Jllaill dilrcrence between
the
control schemes in Fig. 12.14
and
Fig. 12.27 is
l.
h;tI,
I.he
current
control is now performed in field coordinates, where
the
con-
I.roll(
!rs are processing DC signals in steady
state,
thus
avoiding
the
problem
or
pltase shift of
AC
current loops. AIso, the digital
part
of
the
control
may
1I0W
illclude
the
pulse-width-modulator
and
can be extended down
to
thc
I
~
(!ll(!ration
of
the switching signals for
the
converter.
Th(!
rCllIaillder
of
the control system is similar
to
the
one shown in Fig.
I
:~.
1,1.
TI.e
~tructure
in Fig. 12.27 is somewhat
redundant
since
the
task of
is
d
-
1L
lld
isC/
-
mutrol
could also be assumed by the flux and torque controlknl,
(lrllil.i.illg
th(!
CIIIT('1I1;
COl1t,fo\l('rs.
Field weakening is adricvctl with a
fllllCt.ioll
r:
llIlt'J'ill.or
<I<'IllIi
lll
'( a
S
I)(
~
(
~
d
-
dq)(!lld('1I1.
r('r(~I'I'III'(\
for
t\w
lJ1agnl'tisilll';
CIlITI
!
IILi
li
lll
í
l.
l
ll
l',
LIli'
:·i
U,,I.1I1'
voll.
nW!H
wil.h
;~
li
llp"1
illlpO
:i
l'd
vo]I.;q
:.
,'
cOlll.l'ol
loop
wOIII.!
I"
, I\
ljll
lI
lI
.I'
()t
l/atl
hl
..
.
12.3 Control
of
Voltage-fed
Induction
Motor
277
Us3
...
...
e sd
,
Rs
,
------f---
,
,
Flux
Contrai
control/er
U
S
1RfJ
I
U
S
2R(Jf
,
,E
U
3Re'
L-J-~·F::::·~
.
~
:"1.:.:.:.:.:::
~.
s
~L-:'-ó4-.
us
qRef
:.:
.
..
•
..
"
..
:_-.:
(J)Rel
:-------.:
€Re/
Phase Coordinate Current
Speed Angle
spllt
transformo
control/ers
control/er conlrol/er
Fig.
12.27.
Block
diagram
of
induction
motor
control
in
field coordinates,
assuming
volt age source converter (- - - optional)
A
22
kW
induction
motor
fed by a voltage source
transistor
converter
with
vectorial
PWM
and
controlled by a signal processor
programmed
in
C language has been designed
and
tested
in
the
laboratorYj
the
somewhat
modified control
structure
is seen in Fig.
12
.
28
[K52].
Field-weakening is now
performed by a voltage limiter, which corresponds to
the
solution shown in
Fig. 7.13 for a DC motor.
The
converter was a 30
kVA
experimental
unit
with
540 V
DC
link voltage
and
a clock frequency
of
1.37 kHzj
the
sampling
frequency for
the
inner loops is twice
the
clock frequency, Fig. 11.8j
an
integer
fraction
of
this
frequency was used for
the
outer
control loops.
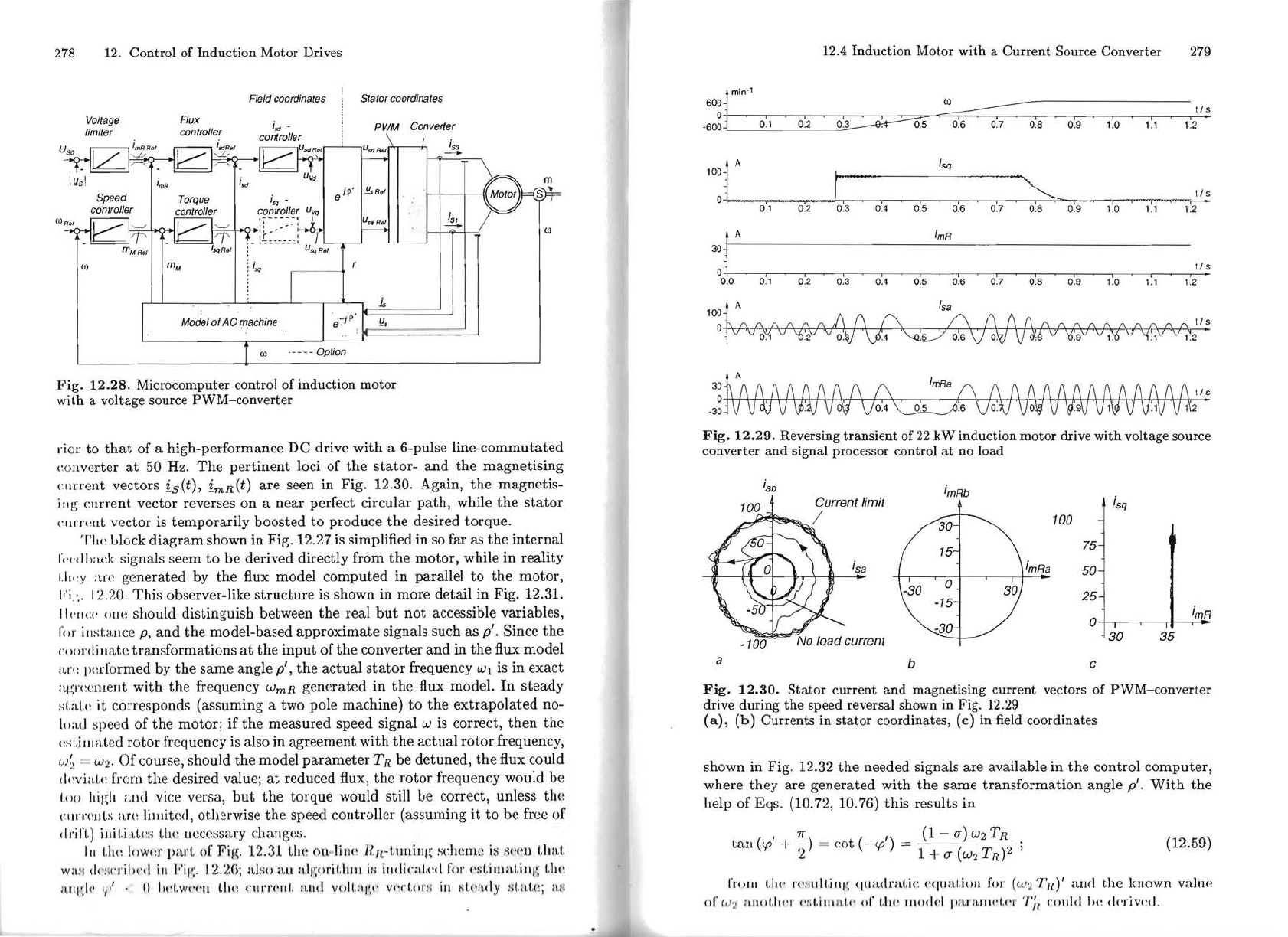
A reversing
transient
of
the
speed controlled drive is depicted
in
Fig. 12.29,
with
the
inertia
of
the
drive increased by a DC dynamometerj
it
confirms
the
expectations
by showing nearly perfect decoupling of
the
d - q- axeSj
I.\ti
s
is
manifested by
the
constant
magnetisiug
current
and
the
rapid
rise
1.0
lll
axilfllll/1 value
of
the
quadrature
current representing torque. While
the
s
tator
Cllrrcllts cxhihit large
transicnt
tenns,
the
magnetising
current
remains
pracl.ically
:
;
illll~;()idali
thiti is
dll(~
t.o
til<'
Iag
TR,
acting as a low pass filter.
'J'!H
!
J'i
~
('
I.illll'
"r
/.III'
I,o('qlll!
of
a
hulIl.
'2
1/1.8
COI'fl'sp
Ollds to the limits imposed
I,.\'
I.h, ·
(',,111.1'
..
1d
'y
II
fi
lII
i ('H
01'
/.IIC'
)'WM
('OIlV
I'I'I,"
r;
I.his
rnpid
I'
ns
poll:w
is
HIIP('
-
278
12
.
Control
or
Induction
Motor
Drives
Field
coordina/es
S/a/or coordina/es
Vol/age
Flux
PWM
Converter
limi/er
m
e
jp'
Speed
con/rol/er
u
VQ
lusaR,,11
I
I~
t
úl
mM
R.,
I I
mM
'",R"
I
úl
i",
-jP'
u
.~
e·
-,
Fig.
12.28.
Microcomputer
control
or
induction
motor
wilh
a voltage source
PWM-converter
rior to
that
of a high-performance
De
drive with a 6-pulse line-commutated
converter
at
50 Hz.
The
pertinent
loci of
the
stator-
and
the
magnetising
Clll'rent vectors
i.s
(t) , i.mR(t) are seen in Fig. 12.30. Again,
the
magnetis-
iIlg
c
mrent
vector reverses on a near perfect circular
path,
while
the
stator
('11
rrcllt vector
is
temporarily boosted
to
produ ce
the
desired torque.
'r1t(~
ulock diagram shown
in
Fig. 12.27
is
simplified in so far as
the
internal
!'c-('dh;lCk
signals seem
to
be derived directly from
the
motor, while in reality
I.Iwy
are
gcnerated by
the
flux model computed
in
parallel
to
the
motor,
I"i)',. 12.20.
This
observer-like
structure
is
shown
in
more detail
in
Fig. 12.31.
11,'(((',(
'
OIW
should distinguish between
the
real
but
not
accessible variables,
('or
illstallce p,
and
the model-based approximate signals such as p'. Since
the
coordillat.e transformations
at
the
input
of
the
converter
and
in
the
flux model
ilJ'(~
l)(~rformed
by
the
sarne angle
p',
the
actual
stator
frequency
Wl
is
in
exact
ll!-,:n~e1l1eIlt
with
the
frequency
WmR
generated
in
the
flux mode!.
ln
steady
~;
I.a(.c
~
it corresponds (assuming a two pole machine)
to
the
extrapolated
no-
loatl speed of
the
motor; if
the
measured speed signal W
is
correct,
then
the
csl.jllli\.ted rotor frequency
is
also in agreement
with
the
actual
rotor frequency,
C,)~~
=
W2
.
Of
course, should
the
model
parameter
TR be detuned,
the
flux could
(kvial,c~
from
the
desired value;
at
reduced flux,
the
rotor frequency would be
1.00
high alld vice versa,
but
the
torque would still be correct, unless
tlH~
CIII,(,C~J)(.S
an
~
liJllitcd, ot.herwise
the
speed controller (assuming
it
to
be frce of
dri!'t.)
illil.ia(.c
~ :
j
lhe
Ilece::;sary
changc~s.
lu
t.hc~
l"wl~r
[larl o[
Fig
. 12.31 lhe
Oll
c
.
lilll
~
Uwt.ulIillg scheme is
HPI~ll
t,hn.t.
W lu<
d"
::l'I'i[,,',]
iIi
ro'il';.
12
.
2(;;
ah;o ali all';llI'it.lllll
iH
illdi(';,i.<
~
d
for
c·
slilllat.il\/
-';
I.ho
.'1
111'.1('
,
/.
I)
IlI'l.w(
·
(·u
t.I,,~
"'"'1"'111
.
iI
.lld volt:q'.'· v,·,·t."!'!: iII
Ht.c'ady
H
t.Il.t.c;
I
I:
:
12.4
Induction
Motor
with
a
Current
Source
Converter
279
Jmin
'1
60~
, ,
~
, , , ,
,I/S
,600
0.1
0.2
O~
0.6
0.7 0.8 0
.9
1.0
1.1
1.2
l
t ".
I
sq
100 . .
O ,
__
.,
, , , , :
~,_
I ,... I
,tis
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
1.1
1.2
tA ImR
:1
, , , , , , , , , , , ,
ti
s
0.0
0.1
0
.2
0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
1.1
1.2
100t
A Isa
o
C/
\J0.v
C
70\
A
I
f\
I
f\
-"/\'1
{\
('
\I
n
f\
1"\ A
yA
f\
Í\
ti
s\
P\1\\A74
f\ ){\,
\
\/~}\r\t
'\f
q
\I
\./
3~p
Af\
f\
f\
f\1JLf\
fV)
(V)JV\
fi
f\1Jlf\
f\
f\JJLf\
tis
ImRa
'30VV
WIJ2J
V
rJJ
V
O
.4
~.6
VoV
VoWíJ
V}9V
IJ1YJ
Vlj,1V
V
112
Fig.
12.29.
Reversing
transient
or
22
kW
induction
motor
drive
with
voltage source
converter
and
signal processar control
at
no load
iSb
i
mRb
Current Iimit
t i
sq
100
100
75
i
mRa
50
25
i
mR
O j
30
.I
35
/
-100
a
b C
Fig.
12.30.
Stator
current
and
magnetising
current
vectors
of
PWM-converter
drive
during
the
speed
rever sal
shown
in
Fig. 12.29
(a),
(b)
Currents
in
stator
coordinates,
(c) in field
coordinates
shown
in
Fig. 12.32
the
needed signals are available in
the
control computer,
where
they
are generated with
the
sarne
transformation
angle p'.
With
the
help of Eqs. (10.72,10.76) this results
in
,
7r
,(1
-
(J)
W2
T
R
tau
(I(!
-I-
:-)
= cot (-<p ) = .
(T
)2
(12.59)
~
1 +
(J
W2
n
1'1'01"
UI('
...
·:ltdt.i/ll·; C[lIaclrat.i/: cCfllat.ioll for (w
'J
Tu)'
ltml
the
known
va.hlP
(Ir
w~
\
H
II.,U",
!'
(·
lI
t,
i
ll
uLl
./·
(lr
t.lw
11ICldd t"l.Il1.l1l1'l.(·r
'/';(
..
.,,,1<1
hc~
dC
'
rivc:c1
,
- 2008 — 2025 «СтудМед»