Werner Leonhard Control of Electrical Drives
Подождите немного. Документ загружается.


300
12. Control of
Indu
c
tion
Motor Drives
12.6 ControI of
an
Inducti
on Motor Using a Combined
FIux
ModeI
301
If
the
flux model is implemented in
stator
coordinates, processing variable
frequency AC quantities,
the
speed dependent
transition
of
the
estimates
from
the
current-based
to
the
voltage-based section could
be
done dynamically by
using
the
frequency response
of
the
observerj again,
at
low speed
the
results
of
the
current
model would
dominate
whereas
the
signals
obtained
from
the
voltages would prevail
at
elevated speed.
&!
~I
r
o::
c;)
CC
C\j
>-
C\,i
CC
C\j
>-
"-
vi
&"
8 1
81
.....
-
(l)
ê:
(l)
2
a
oS
.~
~
a
E:
(l)
Ol
~
~
-o...
~
'+-.
o::
Q
~Q
Q)
'-
~
~
iJ
ti
::J
&!
~
E
0lV)
.
S;;
c:~
I
l-E
:-...5'
~.~~
~
I~~~
8
~c:>-
~~
:s.
::J
-..;::
ço
cc
h~
1
h
~
L0
cc
C\j
>-
c:
"-
"Q
.g
vi
(l)
«l
&"
~.§
r.nVí
,
(l)
Q)
"Q
t t t
a
E:
......
c:
(l)
t::
::J
SJ
'-
~
<'A
'-
<'A
::J
.~
8
Meu
::;
urenll !/Its
l"
i
fl:.
I
:lA7.
(:"".1,;"",, V()Ii.:Ij·.'
'/
cIII
·,...·III.
111,,01,·'
f"r
r"L,,)'
IIIIX ,
·,;
L;lIlilL;()II
13.
Induction
Motor
Drive
with
Reduced
Speed
Range
Some mechanical loads, such as fans
or
centrifugaI pumps, exhibit a
strong
dependence
of
the
load torque
on
speed, so
that
a limited speed control
range suffices for achieving
the
desired effect.
The
sarne is
true
for
rotating
converters employing a flywheel, Sect. 7.4j since
the
kinetic energy
of
the
rotating
masses varies
with
the
square of
the
speed, there
is
little
incentive in
varying
the
speed by more
than,
say
20
or 25%. Similar
situations
exist if
an
electrical island grid with a fluctuating frequency, for instance a railway grid,
is
to
be supplied from
the
public
constant
frequency line
through
a
rotating
converter,
or
conversely, when a variable speed
generator
is feeding power
into
the
constant
frequency grid,
as
may be
the
case with wind energy
plants
or
pumped
storage hydro setsj using variable speed
there
would improve
the
aerodynamic
efficiency of
the
wind
rotor
with
changing wind velo city or
the
hydraulic efficiency
of
a
pumpjturbine
with varying head.
For applications
of
this
kind a wound-rotor induction
motor
drive presents
an interesting solutionj if
the
stator
is connected
to
the
constant
frequency
grid while
the
rotor
is
fed
with
slip frequency by a
static
converter,
its
rating
is
mainly
determined by
the
desired speed range
Llw
and
can be kept relatively
small. Still,
the
slip power
may
be
substantial
with
large machines, calling
for
an
efficient control scheme.
Beginning
at
about
the
tum
of
the
century, a variety of drive circuits has
been developed
that
made
use
of
auxiliary machines such as
rotary
frequency
changers [L23],
they
are
of
course obsolete todaYj
with
the
progress
of
power
electronics new solutions have become possible here too, one of which will
be
discussed in Sect. 13.1.
The
simplified
mathematical
mo deI
of
the
symmetrical
induction
machine derived in Chapo 10 can be used for
this
purpose with
minor modifications.
13.1
Doubly-fed
Induction
Machine
with
Constant
Stator
Frequency
and
Field-orientated
Rotor
Current
Whell
din
~
ct
<:111"1'('111:
is supplied
to
the
sliprings
of
a wound-rotor induction
ll\ol
,oJ') (.11(, :;!.i
Ü,,!'
"r which
is
C()ulwcl.(~d
to the COllstant frequency line,
the
I!lO!."!'
11
:
111
111111': 1
1./11'
Pl'lIpl'!'I,j(
' H
III'
il
fI
.Y11('!tr'
olloIlH
Hladtirl(~.
Constaul'.
(.orqlw
304
13.
Induction
Motor
Drive
with
Reduced
Speed
Range
can only
be
produced
if
the
rotor
is in synchronism
with
the
stator
field;
the
machine
can
also deliver reactive power,
but
at
the
sarne
time
the
problems
of
Lhe
line-fed synchronous machine become
apparent,
which includes
starting
:Iml
synchronisation as
we11
as oscillatory
transients
and
pu11-out torque.
This
i"
st,ill
true,
if
instead
of
the
direct current, a
constant
frequency
alternating
<"Ilrrent
excitation
is applied
to
the
rotor
winding; only
the
speed
ofthe
motor
IIIIIS!.
he
different for
the
stator
and
rotor
ampereturn
waves
to
move again
iii
sYllchronism. For these reasons doubly-fed machines
operated
at
constant
rol.or frequency
are
not
particularly
attractive.
'I'hc
situation
is different, however, if
the
AC
excitation
of
the
rotor
is
IIlad(' <lependent on
the
line volt age vector
and
the
angular
position
of
the
roLor.
The
machine
then
looses
its
synchronous characteristics entirely
and
call
operate
at
variable speed
and
reactive line current;
the
speed
transients
C<LJl
oe
we11
damped
[A13, A14, A31, D32, H36, K17, L13, L23, L27, L40,
Wll,
W'20,
W21, W22].
The
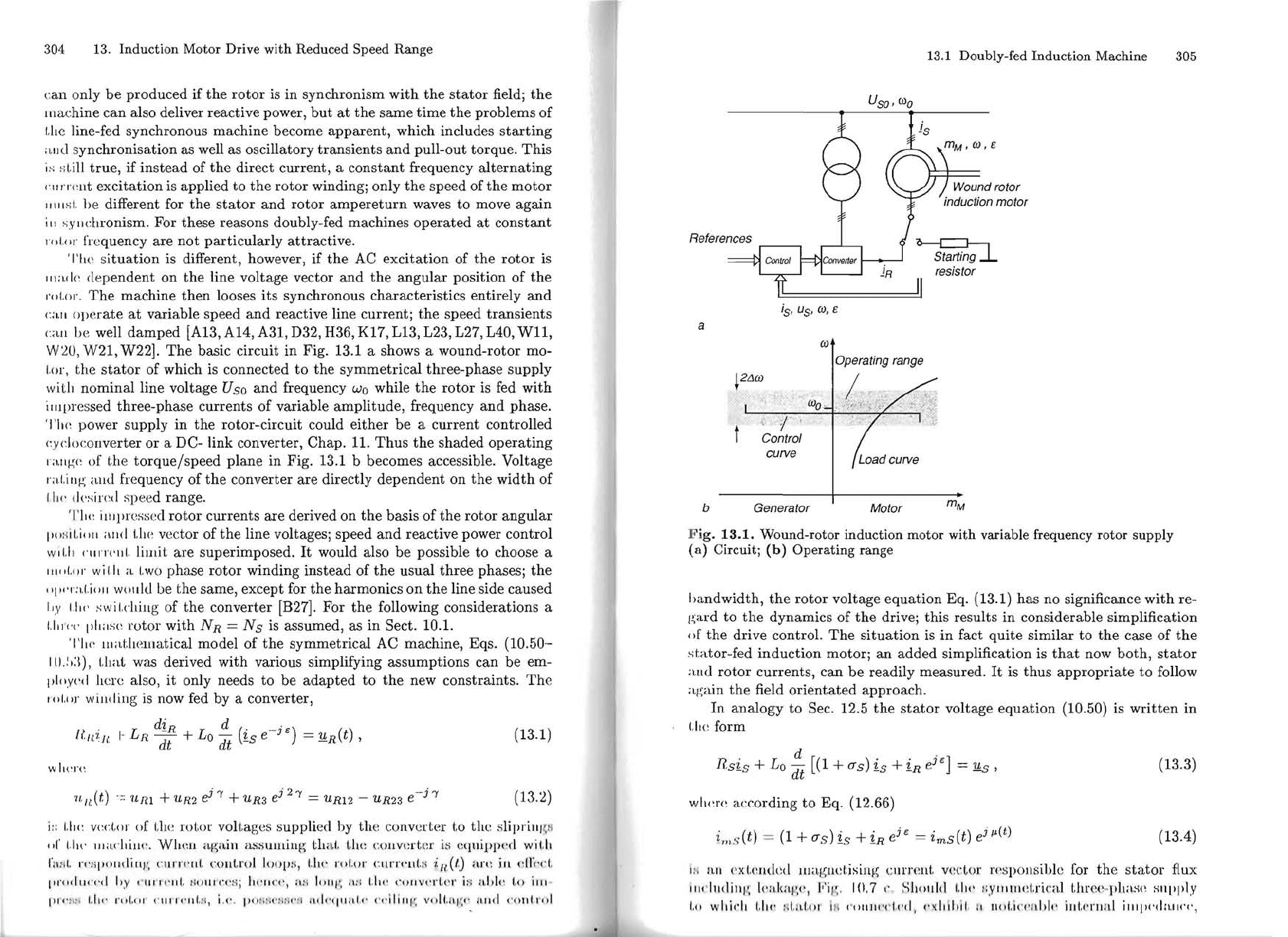
basic circuit in Fig. 13.1 a shows a wound-rotor mo-
Lor,
the
stator
of which is connected
to
the
symmetrical
three-phase
supply
with
nominalline
volt age
Uso
and
frequency
Wo
while
the
rotor
is fed
with
illlpressed three-phase currents
of
variable
amplitude,
frequency
and
phase.
TI)(~
power supply
in
the
rotor-circuit could
either
be
a
current
contro11ed
qclocoIlverter
or
a DC- link converter, Chapo 11.
Thus
the
shaded
operating
r:l.Il{.';(~
of
the
torquejspeed
plane in Fig. 13.1 b becomes accessible. Voltage
r:d,ill{.';
alld
frequency
of
the
converter
are
directly
dependent
on
the
width
of
1,1
1<'
(i\>sircd
speed range.
'I'll(~
iilJpressed
rotor
currents
are
derived on
the
basis
of
the
rotor
angular
i'",
.;i
Lioll
'l.Ild
t.l)(~
vector of
the
line voltages; speed
and
reactive power control
wli,1!
('III'('('IlL
lilIlit
are
superimposed.
It
would also
be
possible
to
choose a
III,d,or
willl a
Lwo
phase
rotor
winding
instead
ofthe
usual
three
phases;
the
"11<'1":t.I,ioll
wOltld
oe the same, except for
the
harmonics
on
the
line side caused
I,,Y
III('
,;wil.chillg of
the
converter [B27]. For
the
fo11owing
considerations a
1.111"'1'
plrasc
rotor
with N
R
=
Ns
is assumed, as in Sect. 10.1.
'1'11<'
lllat.lwllIatical model
of
the
symmetrical
AC machine, Eqs. (10.50-
I
(I,~):\),
t.hat was derived
with
various simplifying assumptions can
be
em-
"Ioy(:d Itere also,
it
only needs to be
adapted
to
the
new constraints.
The
(oLor
willding
is
now fed by a converter,
,
di
R d
(.
- 'E)
/l/(ZI!
I·
L
R
dt
+
Lo
dt
'!:.s
e J = 'QR(t) ,
(13.1)
wlr(')"(~
'2
_.
'/l.I!.(t)
.~:
71Rl
+
71R2
eJ'Y
+
UR3
e
J
'Y
=
UR12
-
UR23
e J
'Y
(13.'2)
1::
Llre
vector
of
tlw
rotor
voItages suppliecl by
the
converter
to
the
sliprilll
(H
01'
IIH' 'llad,ÍiJ(',
W1Wll
ng
ain assulllillg thal.
Ul(~
COllV(~rt;er
is
c<jllipped
wit,h
I"n
nL
!"'
H
IHII
",
lilll',
("llnl'IIL
('oll(,J'
ol
J()()P~i,
I.he'
I'III.O!'
(".111'('1'111.:;
-i/{(t)
<l.n:
iII
dl'<-d
1'!',,<lIIi'I'<I
II,\'
"1111
"III.
H
ill
II
,.
"
,
~
;
h"III"',
ii:;
J""I', .l
::
1.111'
'·"/lV,'!'I.('I
' is I
lll1<-
1,0
illl
I""
ll
tl
UII"
1'1,(,111
l'
III
' I'
I'III,
!l
, i I '
,,"
;lI
I
I'
1
1111'I
1 11
<1"'111
1\
1.
" (,
,'il
l,'I',
\1
1\11.
,
'1
("
li
lld
"0111
1'
111
iS,
us,
OJ,
e
13.1 Doubly-fed
Induction
Machine
305
Wound rotor
induction motor
a
OJ
Operating range
FLlOJ
t
mM
b Generator
Motor
F i
g.
13.1.
Wound-rotor
induction
motor
with
variable frequency
rotor
supply
(a)
Circuit;
(b)
Operating
range
handwidth,
the
rotor
volt age
equation
Eq. (13.1)
has
no significance
with
re-
gard
to
the
dynamics
of
the
drive; this results in considerable simplification
of
the
drive controI.
The
situation
is
in
fact
quite
similar
to
the
case
of
the
stator-fed
induction
motor;
an
added
simplification is
that
now
both,
stator
;llld
rotor
currents,
can
be
readily measured.
It
is
thus
appropriate
to
fo11ow
;lg,ún
the
field
orientated
approach.
ln
analogy
to
Sec. 12.5
the
stator
volt age
equation
(10.50) is
written
in
Llle
form
Rsis
+
Lo
:t
[(1
+
O's)is
+
iR
ejE] ='Qs,
(13.3)
wl,,~r<~
acr.ording
to
Eq. (12.66)
i
.(t)
=
(l+O's)i
+i
ejE=i
s(t)eJI"(t)
(13.4)
m ,
o..;
-s
-R
m
\11
11.1
.1
('X
t.(~Jl(kd
lllagm:tising (:nrre
llt.
vc
rlol' r
f's
ponsiblc for
the
stator
flux
1
1I"ItIl!illl
':
!('
a
lla
)!.
.' ,
I"i
~,
10,7 Sholll,)
1.1,,'
I:YIlIlIld.r
ic
al
t.hre
e-phasc
HlIPP!Y
I'
Ln
wllil'll
1.11<'
n
l.
ft.l",,' in "'01111,','
1,,'<1
,
..
-dl
lhll ii
lI(d,
jc
"
I1.
I.I,'
illl.
e
rll
ll l i
lll]I<'dil.II('(',
306
13.
Induction
Motor
Drive
with
Reduced
Speed
Range
RN
+ jwoLN, for
instance
caused by a
transformer
or
a section
of
the
power
line,
it
can
be included
in
the
effective
stator
transient
impedance
Rs
+ j
Wo
as
Lo
==
Rso +
RN
+ j
Wo
(aso
Lo
+ LN) ,
(13.5)
with
Rso
+ jwoasoLo being
the
transient
impedance
of
the
machine proper.
Eliminating
the
stator
current
fs from Eqs. (13.3, 13.4) leads
to
dfms " _ 1 +
as
" j
Ts
----;{t +
lms
-
~:l!s
+
IR
e
ê
.
(13.6)
Ts
=
Ls
/
Rs
is
the
main
time
constant
of
the
stator
circuito
The
expression
for
the
electrical
torque
is, Eq. (10.52),
mM
=
~
Lo
1m [fs
ÜR
e
j
ê)*]
=
~
1
!oas
1m
[fms (f
R
e
j
ê)*]
.
(13.7)
With
the
introduction
of
the
rotor
current
vector in
stator
coordinates,
f
R
e
j
ê = iR(t) e
j
(€+ê)
, (13.8)
the
torque
is
mM
=
-"3
2
(1
- a) L
R
ims
iR
sin(Ç'
+ e -
J.L)
=
-"3
2
(1
- a) LR
ims
iRq
.
(13.9)
Thc
position
of
the
rotor
current
vector
in
field coordinates,
ti'
t,+e-J.L,
(13.10)
rorf'('sponds
to
the
load angle.
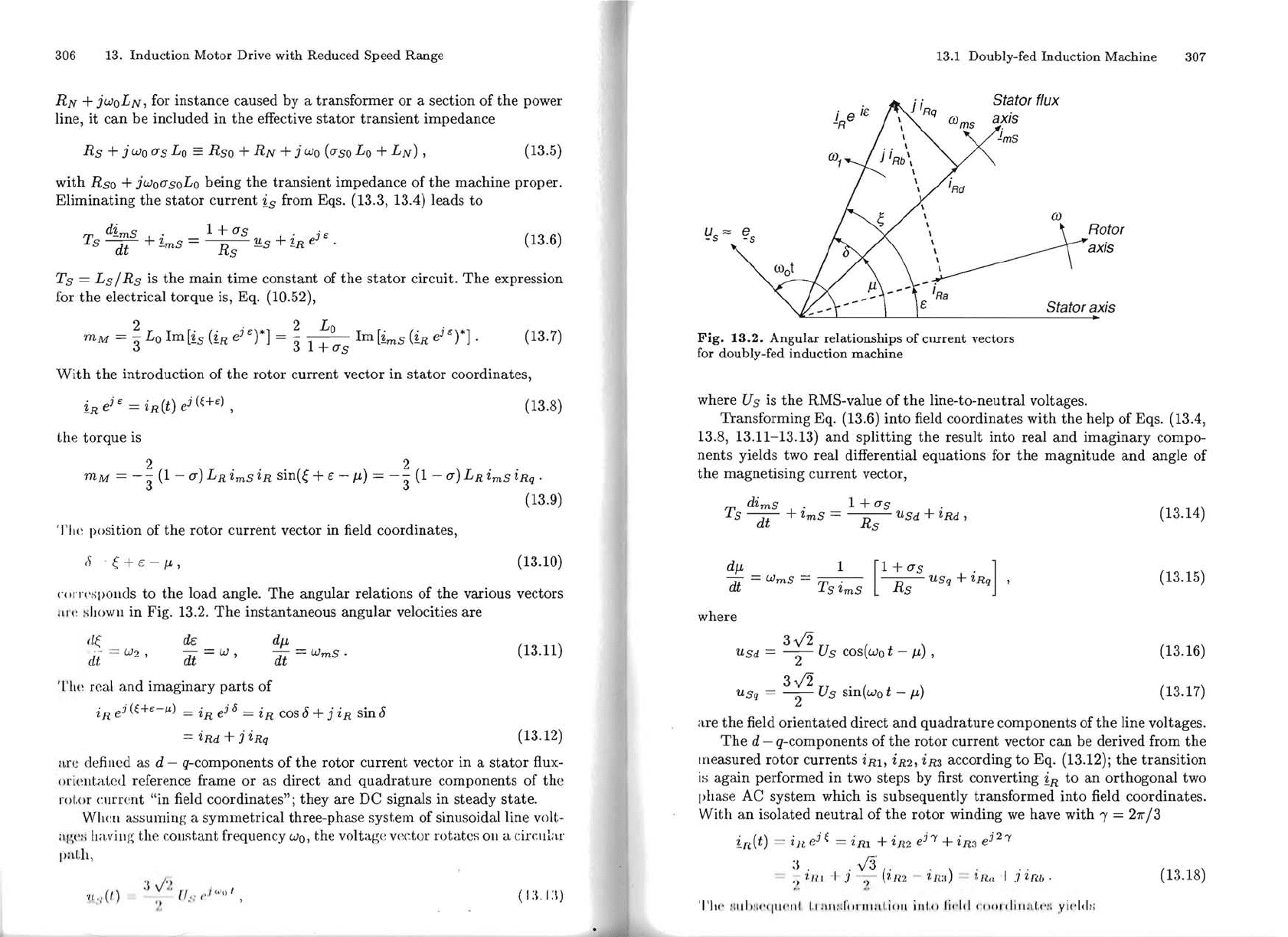
The
angular
relations
of
the
various vectors
\
rc
SIIOWIl
in Fig. 13.2.
The
instantaneous
angular
velocities
are
dE,
de
dJ.L
dt-
=
W2,
dt =
w,
dt = Wms·
(13.11)
'L'h!~
rcal
and
imaginary
parts
of
iR
ej(.~+ê-J.')
= iR e
j
ó = iR cos 8 + j iR sin 8
=iRd +
jiRq
(13.12)
are defined as d - q-components
of
the
rotor
current
vector in a
stator
flux-
()['ieut.a.tcd reference frame
or
as direct
and
quadrature
components
of
the
rot.or
current
"in field coordinates";
they
are
DC
signals in steady
state.
WIl(
~
!l
assuming a
symmetrical
three-phase system
of
sinusoidalline
volt-o
HI-',C:;
bavillg
th
e COllstant frequency
wo,
the voltage
vc-
~
d.or
rotate
s 011 a circlllar
pal.h,
:~
J"
(/
::
/
.1
.
,'
" I ,
( 1:\1:1)
'I/. ' : (I )
' )
13.1 Doubly-fed
Induction
Machine
307
Stator flux
i e
ie
axis
-R
(Um5
f·
1mS
Rotor
u
"'"
e
-5
-5
axis
Stator axis
•
Fig.
13.2.
Angular
relationships
of
current
vectors
for doubly-fed
induction
rnachine
where Us is
the
RMS-value
of
the
line-to-neutral voltages.
Transforming
Eq. (13.6)
into
field coordinates
with
the
help
of
Eqs. (13.4,
13.8, 13.11-13.13)
and
splitting
the
result into real
and
imaginary
compo-
nents
yields two real differential equations for
the
magnitude
and
angle
of
the
magnetising
current
vector,
dims.
1 +
as
.
Ts
----;{t +
~mS
=
~
USd
+
ZRd
,
(13.14)
dJ.L
1
[1
+
as
. ]
(13.15)
dt
=
WmS
=
Tsims
~USq
+ZRq
,
where
3V2
USd
=
-2-
Us
cos(wo
t -
J.L)
,
(13.16)
3/2
.
uS
q
=
-2-
Us sm(wo t -
J.L)
(13.17)
are
the
field
orientated
direct
and
quadrature
components
of
the
line voltages.
The
d - q-components
of
the
rotor
current
vector can be derived from
the
trleasured
rotor
currents
iRl,
iR2,
iR3
according
to
Eq. (13.12);
the
transition
is
again performed
in
two steps by first converting f
R
to
an
orthogonal
two
phase
AC
system
which is subsequently
transformed
into
field coordinates.
With
an
isolated
neutral
of
the
rotor
winding
we
have
with
'Y
=
2rr
/3
:
~n(t)
=
iu
ejÇ
= iRl +iR2
eh
+iR3 e
j2
'Y
:~
.
./3
(.
. ) . _.
.,' 1,/11
:J
T
1.J7.~
-
'/.11
.
:1
'1,11..,
I
.'I
Zn.I,
.
(13.18)
TI
...
1I
111,
1I
"qllO
,
"I
. 1.1
1I
1I:
:,r"IIIIHI.
i,,"
iul." li.·I,1 ,··
,,,,,,Iillnl
.
..
::
.yi..!'):;
:{08
13.
Induction Motor Drive with Reduced Speed Range
. j ("-JL)
_.
j (€+"-JL)
_.
j 8
!.R e - ZR e - ZR e
=
[iRa
+j
iRb][COS(t:
-
p,)
+j sin(t: -
p,)]
=
iRa
cos(t:
-
p,)
-
iRb
sin(t: -
p,)
+j
[iRa
sin(t: -
p,)
+
iRb
cos(t:
-
p,)]
=
iRd
+ j
iRq
;
(13.19)
Llw
angle t: -
p,
may
be
interpreted
as
the
rotor
position
in
field coordinates.
Wound rotor induction motor
(1+<3S)
3-{2 U
s
I
2
I , .
~
.,,-
,_
LI
~
-----
Rs
--~-------------
I
I
I
I
Converter with I
current contrai i
II
R3
i
Rb
II
i
Rq
e
j«.~)
iRai
iR~
Flux
msRef
Contrai
in
field
control/er
coordinates
e
.j(e'~)1
Torque
Speed
contraI/e r
contral/er
iRqRef
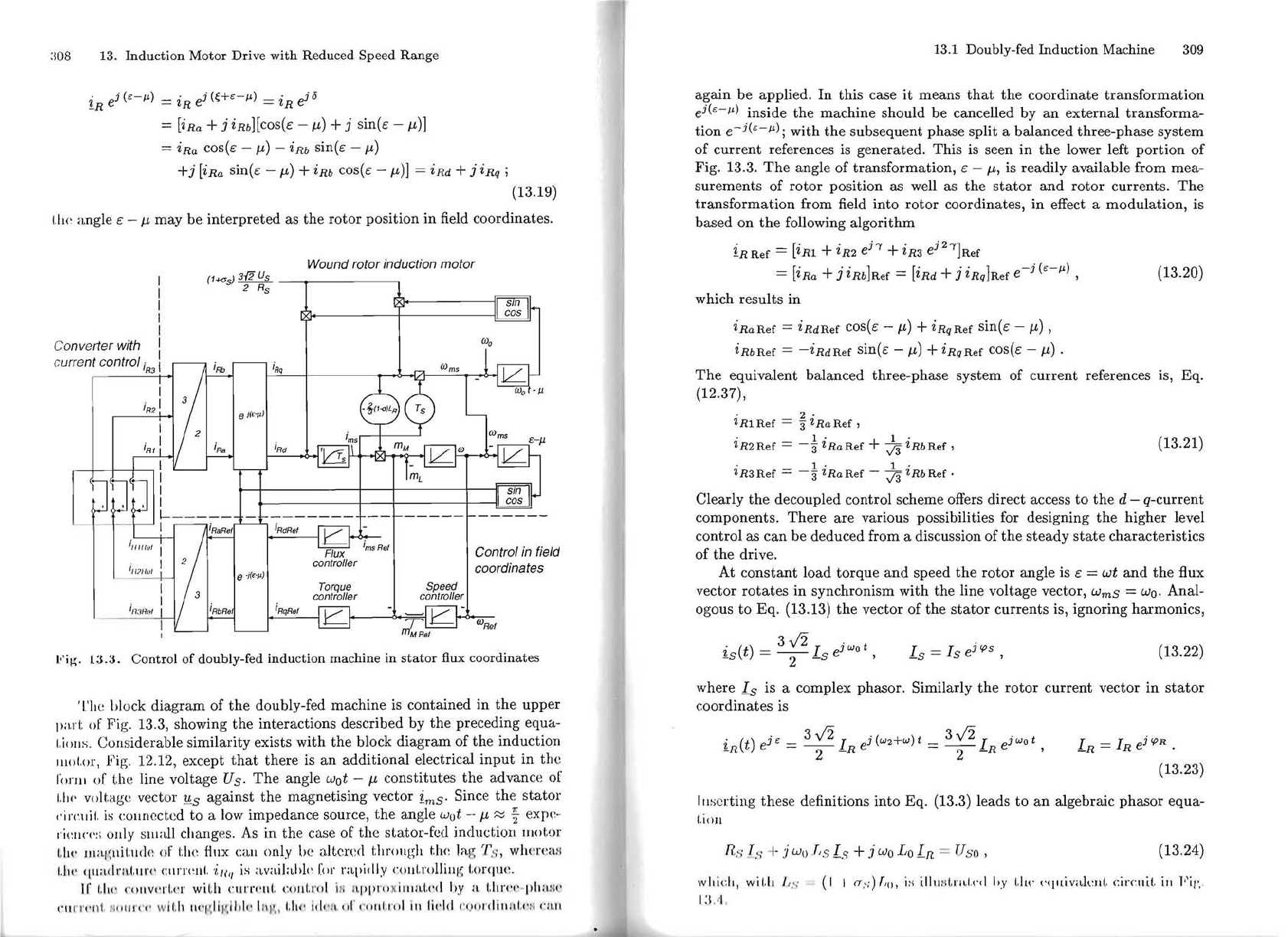
Fi~.
l:~.:i.
Control of doubly-fed induction machine in stator fiux coordinates
'l'ile block
diagram
of
the
doubly-fed machine is contained
in
the
upper
part.
of Fig. 13.3, showing
the
interactions described by
the
preceding equét-
Liolls.
COIlsiderable similarity exists
with
the
block
diagram
of
the
induction
11101.01',
Fig. 12.12, except
that
there
is
an
additional
electrical
input
in
the
rOrJlI
of
the
line voltage
USo
The
angle
wot
-
p,
constitutes
the
advance of
l.!Ip voltagc vector
lL-s
against
the
magnetising vector
!mS'
Since
the
stator
rirclIiL
is
couflcctcd
to
a low impedance source,
the
angle
wot
-
p,
~
~
expc·,
ricll('(':;
ollly slllaU cltanges.
As
in
the
case
of
the
stator-fecl induction
lllot'lr
1'
'\1('
lll;q~llil.lId(~
of
!.lte
fillx cau only be altcrcd t:llrollgh
t.!w
la
g
1'
5,
Wlt
C[
(,iI
.H
!.lH'
qlJ;ldrn,L1JJ'<'
clJrJ'(~JlL
'i/(I{
i:-;
availahk
[01'
rapidJy
(;
olll.rollilll
<
t.orqll
C.
1'[
!.II('
('
oflv
,
'rl.n
wi th ('111'('('111. C
OJlI.
!'
01 i
II
I
I.i>p
rold
lllal.('d
hy
ii.
t.1m'('
pIl
HH"
,'III. 1"
'1\
1,
/)( ,
111'
<'''
wl',
1\
1I
I'I
',
l
ip
,Hdi' Il
tr
"
1,111'
, j
d"
I\
,
II
r(' ,
111(1
,'
11
1 i
II
li('ld
"" ol'.llllíd
,,·
/I
,'
iI,
11
13.1
Doubly-fed Induction Machine
309
again
be
applied.
ln
this case
it
means
that
the
coordinate
transformation
ej("-JL)
inside
the
machine should
be
cancelled by
an
external
transforma-
tion
e-j("-JL);
with
the
subsequent phase split a
balanced
three-phase
system
of
current
references is generated. This is seen
in
the
lower left
portion
of
Fig. 13.3.
The
angle
of
transformation,
t: -
p"
is readily available from
mea-
surements
of
rotor
position as well as
the
stator
and
rotor
currents.
The
transformation
from field into
rotor
coordinates,
in
effect a
modulation,
is
based
on
the
following
algorithm
j2
!RRef
=
[iRl
+i
R2
eh
+
iR3
e
']Ref
'
,.]
['
,.]
-j
("-JL)
=
[
Z
Ra
+J ZRb
Ref
= Z
Rd
+J Z
Rq
Ref
e ,
(13.20)
which
results
in
iRaRef
=
iRdRef
cos(t: -
p,)
+
iRqRef
sin(t: -
p,)
,
iRbRef
=
-iRdRef
sin(t: -
p,)
+
iRqRef
cos(t: -
p,)
.
The
equivalent balanced three-phase system of
current
references is, Eq.
(12.37) ,
. 2 '
ZRIRef
=
"3
ZRaRef,
. 1 . 1 .
ZR2Ref
=
-"3
ZRaRef
+
v'3
ZRbRef,
(13.21)
, 1 ' 1 '
ZR3Ref
=
-"3
ZRaRef
-
v'3
ZRbRef·
Clear1y
the
decoupled control scheme offers direct access
to
the
d - q-current
components.
There
are
various possibilities for designing
the
higher levei
control as
can
be
deduced from a discussion
of
the
steady
state
characteristics
of
the
drive.
At
constant
load
torque
and
speed
the
rotor
angle is t: = wt
and
the
flux
vector
rotates
in
synchronism
with
the line voltage vector,
WmS
=
Wo.
Anal-
ogous
to
Eq.
(13.13)
the
vector
of
the
stator
currents
is, ignoring harmonics,
2
Is
=
is(t)
= 3
V2
Is
e
J
'
Wo
t
,
Is
ej'Ps
,
(13.22)
where
Is
is a complex phasor. Similarly
the
rotor
current
vector
in
stator
coordinates
is
i
(t)e
j
,,=3V2
I
e
j
(w2+
w
)t=3V2
I
e
jwot
IR
= IR
ej'PR
.
-R
2
-R
2
-R
,
(13.23)
Illscrting these definitions into Eq. (13.3) leads
to
an
algebraic
phasor
equa-
I.ioll
Rs
~
s
-I-
.i
Wo
I,s
Is
+ j
Wo
Lo
ln
= U
50
,
(13,24)
Wllich, wil.h L
...
,
(I
I
(7,';)
T'II!
i~j
illllsl.J'II,kd hy Uw ('qllivaklll. circlIil.
iII
Fil',.
I :
\.
,'
I.
:no
13.
Induction
Motor Drive
with
Reduced
Speed
Range
J.s
RS
(JS
LO
1R
U
so
LO
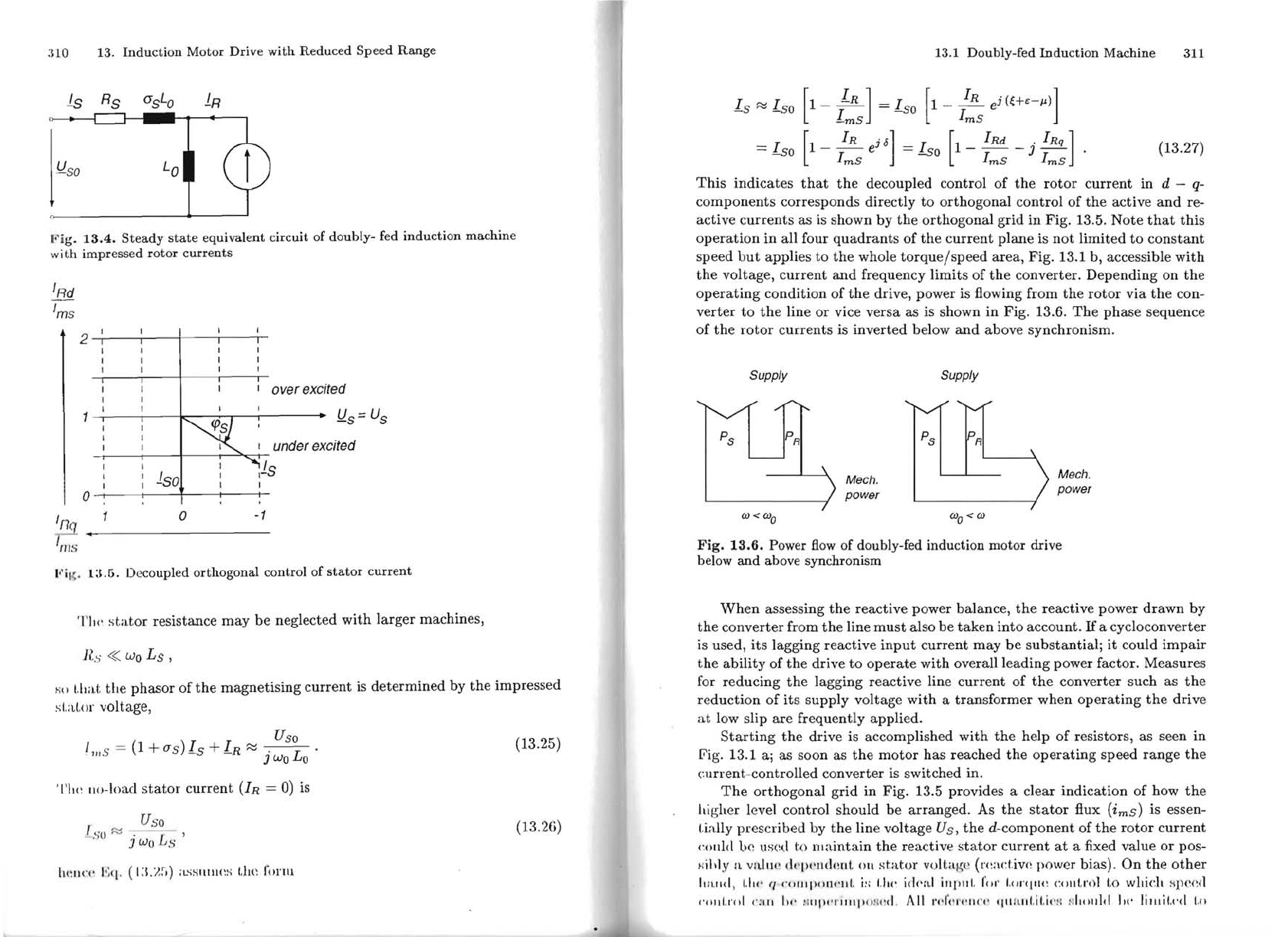
Fi
g.
13.4.
Steady
state
equivalent circuit of doubly- fed
induction
machine
w
ith
impressed
rotor
currents
'Rd
'ms
2~--~--~
r-
--.---.-
I over excited
~
, -
lls"U
s
({JS
'
~
I under excíted
'41s
1so
o
-t-I
-
-1
r---+----r--t-
o
-1
I
nq
III
.'>
"'í,
~
.
1;1.5. Decoupled orthogonal control of
stator
current
TIl(' st.ator resistance may be neglected with larger machines,
Rs «
wo
Ls,
~j()
Lh
at
the
phasor of
the
magnetising current
is
determined by
the
impressed
s
l.aLor
voltage,
Uso
)
1
+1
~
-~.
(13.25)
11/
IS =
(1
+ (JS - S
-R
~
j
Wo
Lo
'I 'he lIo-loa.d s
tator
current (IR =
O)
is
Uso
(13.2(i)
' so
~
j
Wo
Ls
'
IU:ll
co'
I':q. (
1:1./.;')
;L~S
I\'II(
:~;
Lhe
!"mlll
13.1 Doubly-fed
Induction
Machine
311
Is
~
Iso
[
1-
IR
] =
[1
_
ei
(Hé-/ll]
Iso
IR
ImS ImS
IR
e
J
.
ó]
[I
Rd
. IRq]
=
Iso
1 -
---
=
Iso
1 -
---
- J -
(13.27)
[
ImS ImS
ImS
This
indicates
that
the
decoupled control
of
the
rotor
current in d - q-
components corresponds directly
to
orthogonal control of
the
active
and
re-
active currents as
is
shown by
the
orthogonal grid in Fig. 13.5. Note
that
this
operation in ali four
quadrants
of
the
current plane is
not
limited
to
constant
speed
but
applies to
the
whole
torque/speed
area, Fig. 13.1 b, accessible with
the
voltage, Current
and
frequency limits of
the
converter. Depending on
the
operating
condition of
the
drive, power is flowing from
the
rotor
via
the
con-
verter
to
the
line or vice versa as is shown in Fig. 13.6.
The
phase sequence
of
the
rotor
currents is inverted below
and
above synchronism.
Supply
Supply
Ps
RI
Mech.
power
P
1L
)
I
Mech.
power
w<w
o
w <w
o
Fig.
13.6.
Power
flow
of
doubly-fed induction
motor
drive
below
and
above synchronism
When
assessing
the
reactive power balance,
the
reactive power drawn by
the converter from
the
line
must
also be
taken
into account.
If
a cycloconverter
is
used, its lagging reactive
input
current may
be
substantial; it could
impair
the
ability of
the
drive
to
operate
with overallleading power factor. Measures
for reducing
the
lagging reactive line current
of
the
converter such as
the
reduction of its supply volt age with a transformer when operating
the
drive
at low slip are frequently applied.
Starting
the
drive is accomplished with
the
help of resistors, as seen in
Fig. 13.1 a; as soon as
the
motor
has reached
the
operating speed range
the
current-controlied converter
is
switched in.
The
orthogonal grid in Fig. 13.5 provides a clear indication of how
the
higher le
veI
control should be arranged. As
the
stator
flux (ims) is essen-
I.i
ally prescri bed by
the
line volt age U
s,
the
d-component of
the
rotor
current
wlII<l be used to maintain
the
reactive
stator
current
at
a fixed value or pos-
~
:
ihl'y
a
VltlrW
,!<op"Il(I(
:
nl
(ln
M.at.or voltag'!
(n:act
.
iv(
~
power bias). On
the
other
h
11
.
11<\
,
1.111'
IJ
"<lII'IHlIWIIL i:: 1.
11(
:
i<\I'
",
1
illpllt
for 1.<lnpH: c()lIl.rol t.o
whidt
~pc
(
~(
l
,·
olll.ml
LUI
1)<"
::
III"TIIIII
HJ
II
Cd
Ali
",,!" 'r"
II<"I
'
'I11I1.1I1
.
il.i'
·I
: !IIl1ll1ld
1,(,
lilllil
...
<\
Lo
(ú
ReI
úl
's act
Active
Reactive
current
's react
I
!,.Js
I
iSI
.---::,------,-
isI
iRI
E I
I
,-------''---,
U
s
iS
converter
Rotor coordinates
312 13.
Induction
Motor
Drive
with
Reduced
Speed
Range
I.
Microcomputer 8086
-I
control/er
: Coordinate ,
Field coordinates
:transformation:
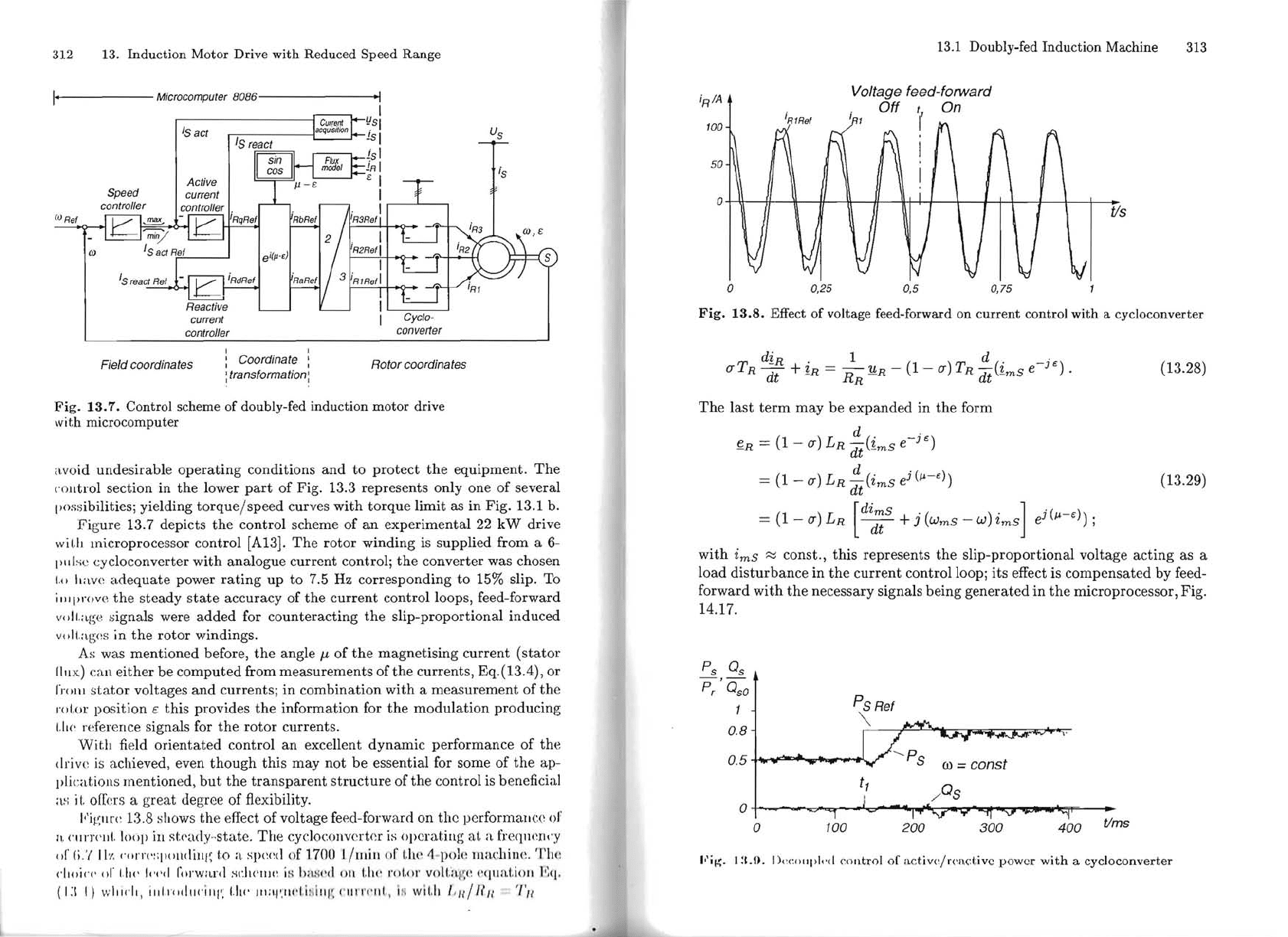
Fig.
13.7.
Contrai
scheme
of
doubly-fed
induction
motor
drive
with
microcomputer
avoid undesirable
operating
conditions
and
to
protect
the
equipment.
The
cOlltroI section in
the
Iower
part
of
Fig. 13.3 represents only one
of
severaI
[JossibiIities; yielding
torque
/ speed curves with
torque
limit as in Fig. 13.1 b.
Figure
13.7 depicts
the
controI scheme
of
an
experimental
22
kW
drive
wi[,1J
microprocessor controI [AI3].
The
rotor
winding is supplied from a
6-
Pllbe
cycloconverter
with
analogue current controI;
the
converter was chosen
1.0
Ilave
adequate
power
rating
up
to
7.5
Hz
corresponding
to
15% sIip. To
illlprovc
the
steady
state
accuracy
of
the
current
controlloops,
feed-forward
voll.age :;ignals were
added
for counteracting
the
slip-proportionaI induced
voll.agcs in
the
rotor
windings.
As was mentioned before,
the
angIe
f.J,
of
the
magnetising current
(stator
flll
x)
UUl
either
be
computed
from measurements
of
the
currents, Eq.(13.4),
or
fr()J\J
stator
voItages
and
currents; in combination with a measurement
of
the
]"o[,or
position ê this provides
the
information for
the
modulation
producing
1.11('
reference signaIs for
the
rotor
currents.
Wit.1J
field
orientated
controI
an
excellent
dynamic
performance
of
the
dri
ve
is achieved, even
though
this
may not
be
essentiaI for some
of
the
ap-
plications rnentioned,
but
the
transparent
structure
of
the controI is beneficial
a~;
i
t.
ofrcrs a
great
degree
of
flexibiIity.
I<'igll[(:
13
.8 shows
the
effect
of
voItage feed-forward on
the
performaucc
01'"
I\. ("II1TI'III. loop ill stl'ady.,state.
The
cyclocollv
ertc
r
is
operatillg
at
a
freqll(~nl'y
clr
(i.'{
11'1.
c'C))TI':q,()l\dilll~
to a
sp'~I:d
of
1.700
l / ll1ill
01'
I.h
(~
I\
-polf: llIH.r.hiw:.
Tlle
c!loi
..
c'
01'
I.!II'
II'c'eI
rorwllrd Sr.lII'IIW is
lJ
.t
SI'
d
OH
I.IH'
. l'Ot.or
v()lI.n
,~
I:
cqllat.iolJ
I';q,
(1:1
I)
wllll'!I,
i
1I1
.l'ocl
IlC'
i
1'1',
1.llI' JlHI,,:
lJdi
:I
I!
'I'.
"111
1'
('11
1" ill
wil,h
[,Ii/
/(11
'1'/1
13.1 Doubly-fed
Induction
Machine
313
Voltage feed-forward
iRIA
.
Off
t. On
In1
iR1Rel
100
50
o I
\\
H
~
H
II
H
~I
I I \ , I I I \
Vs
o 0,25
0,5 0,75
Fig.
13.8.
Effect
of
voltage feed-forward
on
current
control
with
a cycloconverter
di
R
.
1 ( ) T d
('
-J'
E)
(J
T
R
dt
+
~R
=
RR
Y.R - 1 -
(J
R dt
~mS
e .
(13.28)
The
Iast
term
may be
expanded
in the form
d .
~R
=
(1
-
(J)
L
R
dt
(i.mS
e-
J
E)
=
(1
-
(J)
LR
:t
(imS
e
i
(J.I-E))
(13.29)
=
(1
-
(J)
LR
[d~~s
+ j
(wmS
-
w)
i
m
s
]
ei
(J.I-ê)) ;
with
ims
:::::;
const., this represents
the
sIip-proportionaI voltage
acting
as a
Ioad
disturbance
in
the
current
controIIoop; its effect is
compensated
by feed-
forward
with
the
necessary signaIs being
generated
in
the
microprocessor, Fig.
14.17.
Ps Os
Pr'
asO
P
SRef
\.
0.8
'"
=const
0.5
,"'
...
'a
._
.......
• ' ...
-"
ú)
tI
o I _
..
•
ov;:/""9'
·(.....,·-
..
I
..
tI--1P....í>·V·=:ff'
*{P
*
.....
'"""1'
..
tlms
o 100 200
300
400
FiK.
1:1.11.
Ik,:cHlpl, ·d
rnntrol
of
Il.ctive/rcn.çtivc powcr
with
a cycloconverter
:
H4
13.
Induction
Motor
Drive
with
Reduced
Speed
Range
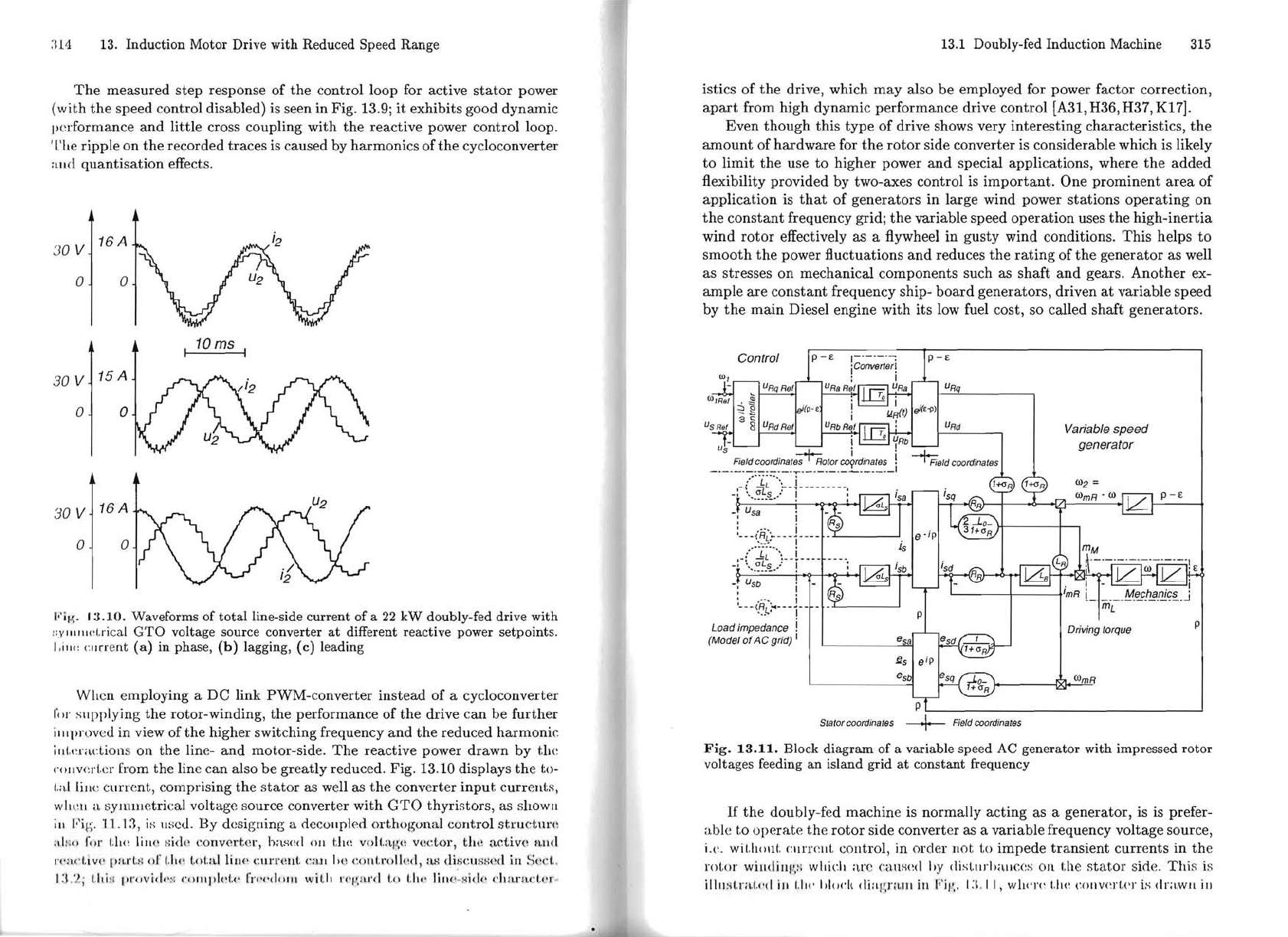
The
measured
step
response
of
the
control loop for active
stator
power
(with
the
speed control disabled) is seen in Fig. 13.9j
it
exhibits good dynamic
pcrformance
and
little cross coupling with
the
reactive power control loop.
'l'he ripple
on
the
recorded traces is caused by
harmonics
of
the
cycloconverter
a.lI(!
quantisation
effects.
30
V'
16 A
OJ
O
1
10ms
1
30 V 115 A
OJ
O
30 V I 16 A
OJ O
I"i
r.:;
. I:J.10. Waveforms of
totalline-side
current
of
a
22
kW
doubly-fed drive
with
::Y
"IIII<'I.ri
ca
l
GTO
voltage source converter
at
different reactive power setpoints.
I.ill
<:
C1ment
(a)
in
phase,
(b)
lagging,
(c)
leading
Whcn employing a
De
link
PWM-
converter
instead
of
a cycloconverter
for
sllpplying
the
rotor-winding, the performance
of
the
drive c
an
be
further
illlproved in view of
the
higher switching frequency
and
the
reduced
harmonk
illt.(~raction
s
on the line-
and
motor-side.
The
reactive power drawn
by
tlw
collverl.er from the line
ca
n also
be
greatly
reduced. Fig. 13.10 displays
the
to-
t.
al
Iill!:
currcnt, comprising the
stator
as well as
the
conve
rter
input
currents,
Wll
C
lI
a sYlfunetrical volt age source converter with
GTO
thyristors, as s
howl1
i
II
ICi
g. 11. I
:3,
is
used. By designing a decollpled orthogonal control
stnl(:tlln~
;d
liO for
(.jl<~
líH
e side
co
nv
erte
r,
ha:wr!
OH
tJl<~
v()lt,:q
~
(
~
vector,
th(~
active
fUld
l"C
°ndi
VI'
p:
....
't
.K
0
1'
t.Il(
~
t.ot.nlliJl(
~
Cllrr(~I1t.
c;t.u
h(~
e
Olltl'oll(
~
d,
as
di
:
~ct
H
;se
d
il1
S
oei.
.
r:!:
.!.j
I.hi
!1
1'
I'
lJ
vid.
,:;
('o"lpld('
[n
'
('d""1
wit
\h
1 '
('
I
~n
,
l'd
t.o
1.111'
liIH
Hlíd., chnrad .• 'r.
13.1 Doubly-fed
Induction
Machine 315
istics
of
the
drive, which
may
also
be
employed for power factor correction,
apart
from high dynamic performance drive control [A31, H36, H37, K17].
Even
though
this
type
of
drive shows very interesting characteristics,
the
amount
of
hardware
for
the
rotor
si de converter is considerable which is likely
to
limit
the
use
to
higher power
and
special applications, where
the
added
flexibility provided by two-axes control is
important.
One
prominent
area
of
application
is
that
of
generators
in
large wind power
stations
operating
on
the
constant
frequency gridj
the
variable speed
operation
uses
the
high-inertia
wind
rotor
effectively as a flywheel
in
gusty
wind conditions.
This
helps
to
smooth
the
power fluctuations
and
reduces
the
rating
of
the
generator
as well
as stresses
on
mechanical components such as
shaft
and
gears.
Another
ex-
ample
are
constant
frequency ship-
board
generators, driven
at
variable
speed
by
the
main
Diesel engine with its low fuel cost, so called shaft generators.
Contrai
p-ê
p-ê
w,
URq
URd
Variable speed
generator
, i
,-
:_--(~~;-.--+-
p
Load
impedance j
Driving forque
(Mo dei
of
AG
grid) I
OlmR
p
~'-------------------------------------------'
S/a/or coordina/8S
--+--
Field coordina/8s
Fig.
13.11.
Block
diagram
of
a variable speed AC
generator
with
impressed
rotor
voltages feeding
an
island grid
at
constant
frequency
If
the
doubly-fed machine is normally
acting
as a generator, is is prefer-
able
to
operate
the
rotor
side converter as a variable frequency volt age source,
i.(·.
wit.ll<llll
,
CIIIT
(!
llt.
control, in order not to
impede
transient
currents
in
th
e
rot.or
Willdil1f',:;
wllich are
c
a.
lul(
~
d
hy díst.llrh:wces OH the
stator
side.
Thi
s is
illll:it.r;d .•
'd
iII LlI('
I"ud
t diaf
!;
r:l.Il1
iII
,I,'il',.
1:
1.
11,
Wh('JT
t.\\(
~
('.ollvnt.(·]"
is
drawll
jlJ
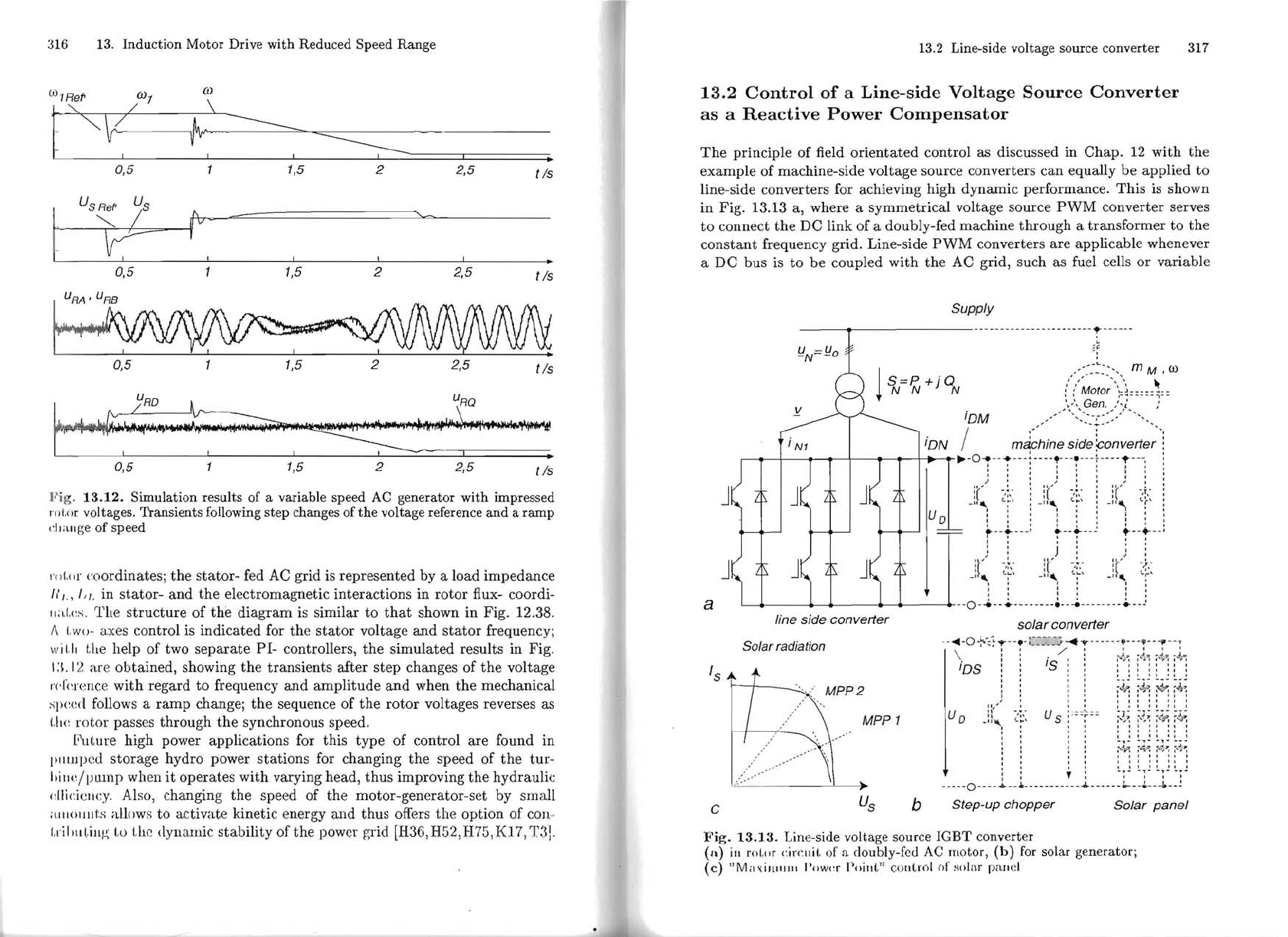
316 13.
Induction
Motor
Drive
with
Reduced
Speed
Range
f~'
fI
~
~~
~==:;;
0,5
1,5
2
2,5
tis
~
US~
,
~
~
fV-
0,5 1,5 2
2,5
tis
U
RA
' U
RB
r··
~
0,5 1 1,5 2
2,5
tis
U
RD
u
RQ
~~.-:
0,5 1 1,5 2
2,5
tis
F
ig.
13.12.
Simulation
results
of a variable
speed
AC
generator
with
impressed
"d,!lr voltages.
Transients
following
step
changes
of
the
volt age reference
and
a
ramp
(:
IJa.lIge
of
speed
1'(
,I.(
,I"
coordinates;
the
stator-
fed
AC
grid is represented by a load impedance
/I
/"
/,
f, in
stator-
and
the
electromagnetic interactions in
rotor
flux- coordi-
II;t.I
,C
S.
The
structure
of
the
diagram
is similar
to
that
shown in Fig. 12.38.
f\
I.w,,- axes control
is
indicated for
the
stator
voltage
and
stator
frequency;
will, the help of two
separate
PI-
controllers,
the
simulated results in
Fig
.
I:\. 1
'2.
are obtained, showing
the
transients after
step
changes of
the
voltage
l'(,r(~l"ence
with
regard
to
frequency
and
amplitude
and
when
the
mechanical
spccd follows a
ramp
change;
the
sequence
of
the
rotor
voltages reverses as
I.ltc
rotor passes through
the
synchronous speed.
Future high power applications for this
type
of control are found in
IHllllpcd storage hydro power stations for changing
the
speed of
the
tur-
bilw/
pump
when
it
operates with varying head,
thus
improving
the
hydraulic
dli(:icm:y. AIso, changing
the
speed of
the
motor-generator-set by small
alllollllts
allows to activate kinetic energy
and
thus offers
the
option of COI1-
I.lilHll
,illg to thc dynamic stability of
the
powcr grid
[H36,
H52,
H75,I<17, T3i .
13.2 Line-side voltage source
converter
317
13.2
Control
of
a
Line-side
Volt
age
Source
Converter
as
a
Reactive
Power
Compensator
The
principIe of field
orientated
control as discussed in Chapo 12
with
the
example of machine-side volt age source converters
can
equally be applied
to
line-side converters for achieving high dynamic performance.
This
is
shown
in Fig. 13.13 a, where a symmetrical voltage source
PWM
converter serves
to
connect
the
DC link
of
a doubly-fed machine
through
a
transformer
to
the
constant
frequency grid. Line-side
PWM
converters are applicable whenever
a DC bus
is
to
be
coupled with
the
AC grid, such as fuel cells
or
variable
Supply
---
.....
-------_
.......................
.....
.
~
~~
YN=Y
o
.
"mM,O)
l
s=p+jQ
N N N
«Moto~\\::::~::
.
,,'.,~~\\
Gen
..
:/",1.'..
"
y
'OM
-,'
'-:
',---.'
"
iON /
ma;~ine
sid~1onverter
':
r-~__1,..~r_~__\----<r_~-tI-~~...-
~
-o .. ·· ..
···:····
, ...•... f····
...
···,
J
• , I r I , I ,
• I I I
I'
, I I I I
) , " I ,
:(
'
.,
;:
:
lt'
-
,
~;
l( -J:
_II'.
<-
....
' •
_II'.
I-r
' t.
r
,
_II~
U
o
I
I.
I
I
'.
I
1 , I I , , I • I
t--~---'
~--~---
+---+--_.
I I I I
II) I
II):
II)'
:(
:/~:
:(
:/~,-
:( :{:
_II'
-1-\
_II'
-:-'
_II'
-r'
I I I I
I I I I I
I I I I
I,
J
a
L-
...
---
.....
>-
....
---
...
-
....
---
...... --o-..
--.--------~---~--------
..
---'
line side
converter
solar
converter
.. ~·o
+.
-
;~"..
..•
-['::::":0
-.
................
_.,.
..
,
Solar radiation
I'
/'
" I '
\.
::
i '
~
~
.I
~
~
:..t
~
~
:
..
~)
~
~
..
y'
'OS
::
S :
::
::
:: :
: :
~-~
~
..
~
~
..
~
~-~
'S
:
:Jr.
:Jr.
~
~~
,
~
I
.,
'"
I
U :i'; .,:,- U
--!---
~1.~
~J~ ~;J
~;J
MPPl
O
_II",
'-
...
' S .
"'':'"
:""i:
:
~
:
~
, I
••
" ,
I I I I
I.
,.
,
I
-,,-
.,-
-'f-
--
-
:
~W:
:
~
:
~:
:
'~ :
•••
"
I,
,
, • ' j I
••
-----O
-.
-
-1-
-
i-
-------
~-
-1
..
---
~
[-
~
l~
-
~r-
~
I -
c
U
s
b
Step-up
chopper
Solar
panei
:Fig.
13.13.
Line-side voltage source
IGBT
converter
(II) in rol.m circllil.
01'
a doubly-fcd AC
motor,
(b)
for solar generatorj
(c)
"MHXilLIIIIII
I'ow(~r
PoillV' çonLro\
01'
~()Iu
.
r
pnlle1
--
--------------
--
--
----------
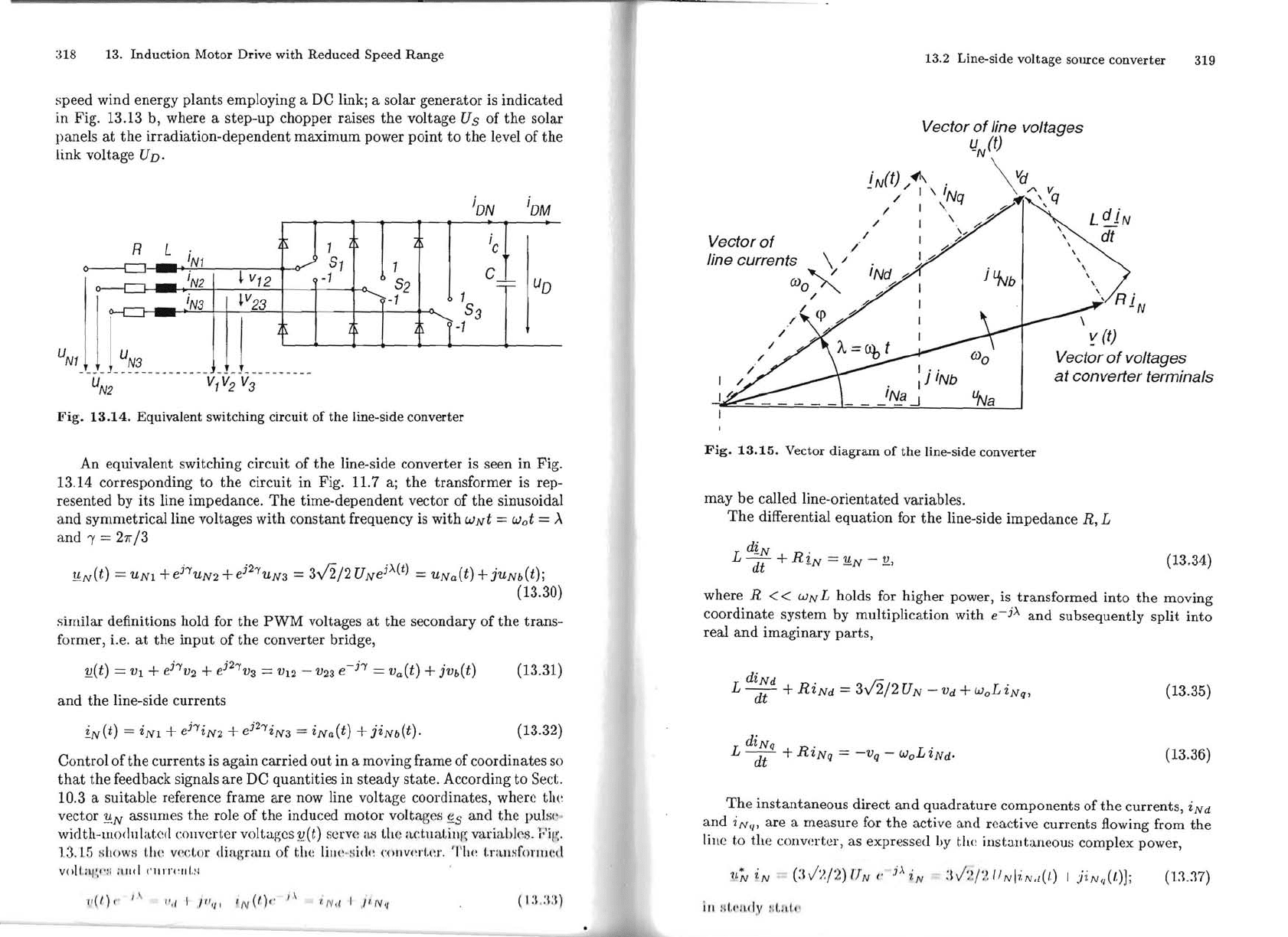
318 13.
Induction
Motor Drive
with
Reduced
Speed
Range
~peed
wind energy plants employing a DC Iinki a solar generator is indicated
in Fig. 13.13 b, where a step-up chopper raises
the
voltage Us of
the
solar
paneIs
at
the
irradiation-dependent maximum power point
to
the
leveI
of
the
Iink voltage UD.
i
ON
iOM
T
R L
íNl
o---CJ
-'í
N2
1
-I-
~_.
I
.
v
12
v
23
Il
J1
51
-1
'_f2
r
L
'----
53
l-I
t 1
ti
í I
ic
c,
-,-
Uo
iN3
-I-
U
U
j
1
N1
N3
U
N2
V
1
V
2
V
3
Fig.
13.14.
Equivalent switching circuit of
the
line-side converter
An equivalent switching circuit of
the
line-side converter is seen in Fig.
13
.14 corresponding to
the
circuit in Fig. 11.7 ai the transformer is rep-
resented by
its
line impedance.
The
time-dependent vector
of
the
sinusoidal
and
symmetricalline
voltages with constant frequency is
with
wNt =wot =
~
and , = 27r/3
Y,N(t) = UNi
+e
h
UN2
+e
j2
'UN3 =3../2/2
UNei>\(t)
=UNa(t) + jUNb(t)i
(13.30)
similar definitions hold for
the
PWM
volt ages
at
the secondary of
the
trans-
former, i.e.
at
the
input
of
the converter bridge,
j2
:11.(t)
=
Vi
+ e
h
v2
+ e
'v3
=
V12
-
V23
e-h
= va(t) + jVb(t)
(13.31)
and
the line-side currents
j2
iN(t)
=
iNl
+ e
h
iN2 + e
'iN3
= iNa(t) + jiNb(t).
(13.32)
Control of
the
currents is again carried out in a moving frame of coordinates so
that
the feedback signaIs are DC quantities in steady state. According to Sect.
10.3 a suitable reference frame are now line voltage coordinates, wherc tlw
vector
Y,N
assumes
the
role of the induced
motor
voltages
~s
anel
th
e
i>uls(
~
width-lIlodnlat.cd converter voltagcs y(t) serve a!i
Lhe
aetnaLiIlf( variabJes.
Fig.
13.
Ui
slIowH
Lhe
v
{:c
Lor
dia
g-ra
m of tlw
lill(
·~
·
sid(
~
C(>lIv(
~
rt.(
~
r.
'l'll(~
t.rallsforllwd
voll
.
;I./',""
;
lIId
'·III.,.c:"I.~l
.,,(1) ,.
1\
II"
I'
I'I,,,
' N
U)'
,·
,\
·
~N.
t
I 111V'1
( 1:
1.:\
:
1)
13.2 Line-side voltage source converter
319
Vector
o,
fine voltages
LJi
tJ
!N(t)
/.-.\.
d
/\
v\ V
/ I \ 'Nq
~
\ q
I \ Q
I',
/ \ h
LdiN
/ . h
...
/ '
.....
\
,
dt
~c~r~
/
dÓ
,
\
,
fine currents \
/.
l·6
'-
/ 'Nd 6
j
t.Nb
\
úJo .
A......
,6
/ ó
,
R'
,ó
\
'! (t)
I
.
jiNb
I
_'''!3
-.J
UNa
J
LN
Vector
o,
voltages
at
converter
terminaIs
Fig.
13.15.
Vector
diagram
of
the
line-side converter
may
be called line-orientated variables.
The
differentiaI equation for
the
line-side impedance
R,
L
diN .
L
dt
+ R
'!,.N
=
Y,N
-
:11.,
(13.34)
w here
R < < W N L holds for higher power, is transformed into
the
moving
coordinate system by multiplication with
e-
j
>..
and
subsequently split into
real
and
imaginary
parts,
diNd .
In/
L '
L--+R2Nd=3v2
2UN-Vd+Wo
2Nq,
(13.35)
dt
diNq R '
L'
L--
+
2Nq
=
-v
q
-W
o
2Nd,
(13.36)
dt
The
instantaneous direct
and
quadrature
components
ofthe
currents, iNd
and i
Nc11
are a measure for
the
active and reactive currents flowing from
the
line to
the
converter, as expressed by thc instantaneous complex power,
11."rv
'
lN
(
:
IJ:~/2)
lI
N
"
.
i>-'
i
N
-
:IJ:~/'2
(/NI'iNdU) I
jiN,,(l)Jj
(1:1.~7)
I"
!i
1.(
·ll.
dy
nUd,
<'
- 2008 — 2026 «СтудМед»