Vidakovic B. Statistics for Bioengineering Sciences: With Matlab and WinBugs Support
Подождите немного. Документ загружается.

136 5 Random Variables
strength of heartbeat, and reflex, with a high score indicating a healthy infant.
Let the random variable X denote the Apgar score of a randomly selected new-
born infant at a particular hospital. Suppose that X has a given probability
distribution:
X
0 1 2 3 4 5 6 7 8 9 10
Prob .002 .001 .002 .005 .02 .04 .17 .38 .25 .12 .01
.
The following MATLAB program calculates (a)
EX , (b) Var (X ), (c) EX
4
, (d)
F(x), (e)
P(X <4), and (f) P (2 < X ≤3):
X = 0:10;
p = [0.002 0.001 0.002 0.005 0.02 ...
0.04 0.17 0.38 0.25 0.12 0.01];
EX = X
*
p’ %(a) EX = 7.1600
VarX = (X-EX).^2
*
p’ %(b) VarX = 1.5684
EX4 = X.^4
*
p’ %(c) EX4 = 3.0746e+003
ps = [0 cumsum(p)];
Fx = @(x) ps( min(max( floor(x)+2, 1),12) ); %handle
Fx(3.45) %(d) ans = 0.0100
sum(p(X < 4)) %(e) ans = 0.0100
sum(p(X > 2 & X <= 3)) %(f) ans = 0.0050
Note that the CDF F is expressed as function handle Fx to a custom-made
function.
Example 5.3. Cells. Randomly observed circular cells on a plate have a diam-
eter D that is a random variable with the following PMF:
D
8 12 16
Prob 0.4 0.3 0.3
.
(a) Find the CDF for D.
(b) Find the PMF for the random variable A
= D
2
π/4 (the area of a cell).
Show that
EA 6=(ED)
2
π/4. Explain.
(c) Find the variance
Var (A).
(d) Find the moment-generating functions m
D
(t) and m
A
(t). Find Var (A)
using its moment-generating function.
(e) It is known that a cell with D
> 8 is observed. Find the probability of
D
=12 taking into account this information.
Solution:
(a)
F
D
(d) =
0, d <8
0.4, 8
≤ d <12
0.7, 12
≤ d <16
1, d
≥16
(b)

5.2 Discrete Random Variables 137
A 8
2
π/4 12
2
π/4 16
2
π/4
Prob 0.4 0.3 0.3
A
16π 36π 64 π
Prob 0.4 0.3 0.3
EA =16 π(
4
10
) +36π(
3
10
) +64π(
3
10
) =
364π
10
=114.3540.
ED =8(
4
10
) +12(
3
10
) +16(
3
10
) =116/10 =11.6
(ED)
2
π
4
=
3364π
100
6=
364π
10
.
The expectation is a linear operator, and such a “plug-in” operation would
work only if the random variable A were a linear function of D, i.e., if A
=
αD +β, E A = αED +β. In our case, A is quadratic in D, and “passing” the
expectation through the equation is not valid.
(c)
Var A =EA
2
−(E A)
2
=1720π
2
−1324.96 π
2
=395.04π
2
,
since
A
2
16
2
π
2
36
2
π
2
64
2
π
2
Prob 0.4 0.3 0.3
(e) When D
>8 is true, only two values for D are possible, 12 and 16. These
values are equally likely. Thus, the distribution for D
|{D >8} is
D
|{D >8} 12 16
Prob 0.3/0.6 0.3/0.6
,
and
P(D = 12|D > 8) = 1/2. We divided 0.3 by 0.6 since P (D > 8) = 0.6. From
the definition of the conditional probability it follows that,
P(D = 12| D > 8) =
P
(D =12, D >8)/P(D >8) =P(D =12)/P(D >8) =0.3/0.6 =1/2.
There are important properties of discrete distributions in which the real-
izations x
1
, x
2
,... , x
n
are irrelevant and the focus is on the probabilities only,
for example, the measure of entropy. For a discrete random variable where the
probabilities are p
=(p
1
, p
2
,... , p
n
) the (Shannon) entropy is defined as
H (p) =−
X
i
p
i
log(p
i
).
Entropy is a measure of the uncertainty of a random variable and for finite
discrete distributions achieves its maximum when the probabilities of realiza-
tions are equal, p
=(1/n,1/n,...,1/n).
For the distribution in Example 5.2, the entropy is 1.5812.
and E A
2
=1720π
2
.
(d)
m
D
(
t
)
=
E
e
tD
=
0
.
4
e
8t
+
0
.
3
e
12t
+
0
.
3
e
16t
,
and
m
A
(
t
)
=
E
e
tA
=
0
.
4
e
16πt
+
0.3e
36πt
+0.3e
64πt
.
From m
0
A
(t) =6.4e
16πt
+10.8e
36πt
+19.2e
64πt
, and m
00
A
(t) =6.4e
16πt
+10.8e
36πt
+
19.2e
64πt
, we find m
0
A
(0) = 36.4π and m
00
A
(0) = 1720π, leading to the result in
(c).

138 5 Random Variables
ps = [.002 .001 .002 .005 .02 .04 .17 .38 .25 .12 .01]
entropy = @(p) -sum( p(p>0) .
*
log(p(p>0)))
entropy(ps) %1.5812
The maximum entropy for distributions with 11 possible realizations is 2.3979.
5.2.1 Jointly Distributed Discrete Random Variables
So far we have discussed probability distributions of a single random vari-
able. As we delve deeper into this subject, a two-dimensional extension will be
needed.
When two or more random variables constitute the coordinates of a random
vector, their joint distribution is often of interest. For a random vector (X ,Y )
the joint distribution function is defined via the probability of the event
{X ≤
x,Y ≤ y},
F(x, y)
=P(X ≤ x,Y ≤ y).
The univariate case
P(a ≤ X ≤ b) = F(b)−F(a) takes the bivariate form
P(a
1
≤ X ≤ a
2
, b
1
≤Y ≤ b
2
) = F(a
2
, b
2
) −F(a
1
, b
2
) −F(a
2
, b
1
) +F(a
1
, b
1
).
Marginal CDFs F
X
and F
Y
are defined as follows: for X , F
X
(x) = F(x, ∞)
and for Y as F
Y
(y) = F(∞, y).
For a discrete bivariate random variable, the PMF is
p(x, y)
=P(X = x,Y = y),
X
x,y
p(x, y) =1,
while for marginal random variables X and Y the PMFs are
p
X
(x) =
X
y
p(x, y), p
Y
(y) =
X
x
p(x, y).
The conditional distribution of X given Y
= y is defined as
p
X |Y =y
(x) = p(x, y)/p
Y
(y),
and, similarly, the conditional distribution for Y given X
= x is
p
Y |X =x
(y) = p(x, y)/p
X
(x).
When X and Y are independent, for any “cell” (x, y), p(x, y)
=P(X = x, Y =
y) = P(X = x)P(Y = y) = p
X
(x) p
Y
(y), that is, the joint probability of (x, y)
is equal to the product of the marginal probabilities. If, on the other hand,
5.2 Discrete Random Variables 139
p(x, y) = p
X
(x)p
Y
(y) holds for every (x, y), then X and Y are independent. The
independence of two discrete random variables is fundamental for the infer-
ence in contingency tables (Chap. 14) and will be revisited later.
Example 5.4. The PMF of a two-dimensional discrete random variable is given
by the following table:
Y
5 10 15
X
1
0.1 0.2 0.3
2
0.25 0.1 0.05
The marginal distributions for X and Y are
X
1 2
Prob 0.6 0.4
and
Y
5 10 15
Prob 0.35 0.3 0.35
while the conditional distribution for X when Y
=10 and the conditional dis-
tribution for Y when X
=2 are
X
|Y =10 1 2
Prob 0.2/0.3 0.1/0.3
and
Y
|X =2 5 10 15
Prob 0.25/0.4 0.1/0.4 0.05/0.4
,
respectively.
Here X and Y are not independent since
0.1
=P(X =1,Y =5) 6=P(X =1)P (Y =5) =0.6 ·0.35 =0.21.
For two independent random variables X and Y , EX Y = EX ·EY , that is,
the expectation of a product of random variables is equal to the product of
their expectations.
The covariance of two random variables X and Y is defined as
Cov(X ,Y ) =E((X −EX ) ·(Y −EY )) =EX Y −EX ·EY .
For a discrete random vector (X ,Y ),
EX Y =
P
x
P
y
xyp(x, y), and the covari-
ance is expressed as
Cov(X ,Y ) =
X
x
X
y
xyp(x, y) −
X
x
xp
X
(x)
X
y
yp
Y
(y).
It is easy to see that the covariance satisfies the following properties:

140 5 Random Variables
Cov(X , X) =Var (X ),
Cov(X ,Y ) =Cov(Y , X), and
Cov(aX +bY , Z) = a Cov(X , Z) +b Cov(Y , Z).
For (X ,Y ) from Example 5.4 the covariance between X and Y is
−1. The
calculation is provided in the following MATLAB code. Note that the distribu-
tion of the product X Y is found in order to calculate
EX Y .
X=[1 2]; pX=[0.6 0.4]; EX = X
*
pX’
%EX = 1.4000
Y=[5 10 15]; pY=[0.35 0.3 0.35]; EY = Y
*
pY’
%EY =10
XY =[5 10 15 20 30];
pXY=[0.1 0.2+0.25 0.3 0.1 0.05]; EXY=XY
*
pXY’
%EXY = 13
CovXY = EXY - EX
*
EY
%CovXY = -1
The correlation between random variables X and Y is the covariance nor-
malized by the standard deviations:
Corr(X ,Y ) =
C
ov(X ,Y )
p
Var X ·Var Y
.
In Example 5.4, the variances of X and Y are
Var X =0.24 and Var Y = 17.5.
Using these values, the correlation
Corr(X ,Y ) is −1/
p
0.24 ·17.5 = −0.488.
Thus, the random components in (X ,Y ) are negatively correlated.
5.3 Some Standard Discrete Distributions
5.3.1 Discrete Uniform Distribution
A random variable X that takes values from 1 to n with equal probabilities
of 1/n is called a discrete uniform random variable. In MATLAB
unidpdf and
unidcdf are the PDF and CDF of X , while unidinv is its quantile. For example,
unidpdf(1:5, 5)
%ans = 0.2000 0.2000 0.2000 0.2000 0.2000
unidcdf(1:5, 5)
%ans = 0.2000 0.4000 0.6000 0.8000 1.0000
are the PDF and CDF of the discrete uniform distribution on {1, 2,3,4,5}. From
P
n
i
=1
i = n(n +1)/2, and
P
n
i
=1
i
2
= n(n +1)(2n +1)/6 one can derive EX = (n +

5.3 Some Standard Discrete Distributions 141
1)/2 and Var X = (n
2
−1)/12. One of the important uses of discrete uniform
distribution is in nonparametric statistics (p. 482).
Example 5.5. Discrete Uniform: A Basis for Random Sampling. Suppose
that a population is finite and that we need a sample such that every subject
in the population has an equal chance of being selected.
If the population size is N and a sample of size n is needed, then if replace-
ment is allowed (each sampled object is recorded and then returned back to
the population), there would be N
n
possible equally likely samples. If replace-
ment is not allowed or possible (all subjects in the selected sample are to be
different, that is, sampling is without replacement), then there would be
¡
N
n
¢
different equally likely samples (see Sect. 3.5 for a definition of
¡
N
n
¢
).
The theoretical model for random sampling is the discrete uniform distri-
bution. If replacement is allowed, each of
{1,2,.. . , N} has a probability of 1/N
of being selected. In the case of no replacement, possible subsets of n subjects
can be indexed as
{1,2,.. . ,
¡
N
n
¢
}
and each subset has a probability of 1/
¡
N
n
¢
of
being selected.
In MATLAB, random sampling is achieved by the function
randsample. If
the population has n indexed subjects (from 1 to n), the indices in a random
sample of size k are found as
indices=randsample(n,k).
If it is possible to code the entire population as a vector
population, then
taking a sample of size k is done by
y=randsample(population,k).
The default is set to sampling without replacement. For sampling with
replacement, the flag for replacement should be
’true’. If the sampling is done
with replacement, it can be weighted with a nonnegative weight assigned to
each subject in the population:
y=randsample(population,k,true,w). The size
of weight vector
w should be the same as that of population.
For instance,
randsample([’A’ ’C’ ’G’ ’T’],50,true,[1 1.5 1.4 0.9])
%ans = GCCTAGGGCATCCAAGTCGCGGCCGAGAATCAACGTTGCAGTGCTCAAAT
5.3.2 Bernoulli and Binomial Distributions
A simple Bernoulli random variable Y is dichotomous with P(Y = 1) = p and
P(Y = 0) = 1 − p for some 0 ≤ p ≤1 and is denoted as Y ∼ B er(p). It is named
after Jakob Bernoulli (1654–1705) a prominent Swiss mathematician and as-
tronomer (Fig. 5.3a). Suppose that an experiment consists of n independent
trials (Y
1
,... , Y
n
) in which two outcomes are possible (e.g., success or failure),
with
P(success) =P(Y =1) = p for each trial. If X = x is defined as the number
of successes (out of n), then X
=Y
1
+Y
2
+···+Y
n
and there are
¡
n
x
¢
arrangements
of x successes and n
−x failures, each having the same probability p
x
(1−p)
n−x
.
X is a binomial random variable with the PMF

142 5 Random Variables
p
X
(x) =
Ã
n
x
!
p
x
(1 − p)
n−x
, x =0,1,..., n.
This is denoted by X
∼ B in(n, p). From the moment-generating function
m
X
(t) =(pe
t
+(1 − p))
n
we obtain µ =EX = n p and σ
2
=Var X = np(1− p).
The cumulative distribution for a binomial random variable is not simpli-
fied beyond the sum, i.e., F(x)
=
P
i≤x
p
X
(i). However, interval probabilities can
be computed in MATLAB using
binocdf(x,n,p), which computes the CDF at
value x. The PMF can also be computed in MATLAB using
binopdf(x,n,p). In
WinBUGS, the binomial distribution is denoted as
dbin(p,n). Note the oppo-
site order of parameters n and p.
Example 5.6. Left-Handed Families. About 10% of the world’s population is
left-handed. Left-handedness is more prevalent in men (1/9) than in women
(1/13). Studies have shown that left-handedness is linked to the gene LR-
RTM1, which affects the symmetry of the brain. In addition to its genetic
origins, left-handedness also has developmental origins. When both parents
are left-handed, a child has a probability of 0.26 of being left-handed.
Ten families in which both parents are left-handed and have a single child
are selected, and the ten children are inspected for left-handedness. Let X be
the number of left-handed among the inspected. What is the probability that
X
(a) Is equal to 3?
(b) Falls anywhere between 3 and 6, inclusive?
(c) Is at most 4?
(d) Is not less than 4?
(e) Would you be surprised if the number of left-handed children among
the ten inspected was eight? Why or why not?
The solution is given by the following annotated MATLAB script.
% Solution
disp(’(a) Bin(10, 0.26): P(X = 3)’);
binopdf(3, 10, 0.26)
% ans = 0.2563
disp(’(b) Bin(10, 0.26): P(3 <= X <= 6)’);
% using binopdf(x, n, p)
disp(’(b)-using PDF’); binopdf(3, 10, 0.26) + ...
binopdf(4, 10, 0.26) + binopdf(5, 10, 0.26)+ binopdf(6, 10, 0.26)
% using binocdf(x, n, p)
disp(’(b)-using CDF’); binocdf(6, 10, 0.26) - binocdf(2, 10, 0.26)
% ans = 0.4998
%(c) at most four i.e., X <= 4
disp(’(c) Bin(10, 0.26): P(X <= 4)’); binocdf(4, 10, 0.26)
% ans = 0.9096
%(d) not less than 4 is 4,5,...,10, or complement of <=3
disp(’(d) Bin(12, 0.7): P(X >= 4)’); 1-binocdf(3, 10, 0.26)
% ans = 0.2479
disp(’(e) Bin(10, 0.26): P(X = 8)’);
5.3 Some Standard Discrete Distributions 143
binopdf(8, 10, 0.26)
% ans = 5.1459e-004
% Yes, this is a surprising outcome since the probability
% of this event is rather small, 0.0005.
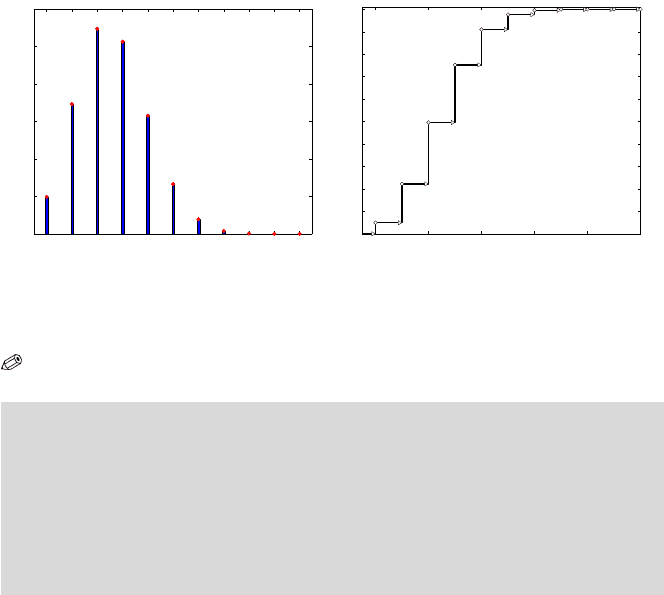
Panels (a) and (b) in Fig. 5.2 show respectively the PMF and CDF for the
binomial
B in(10,0.26) distribution.
0 1 2 3 4 5 6 7 8 9 10
0
0.05
0.1
0.15
0.2
0.25
0 2 4 6 8 10
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
(a) (b)
Fig. 5.2 Binomial
B in(10,0.26) (a) PMF and (b) CDF.
How does one recognize that random variable X has a binomial distri-
bution?
(a) It allows an interpretation as the sum of “successes” in n Bernoulli
trials, for n fixed.
(b) The Bernoulli trials are independent.
(c) The Bernoulli probability p is constant for all n trials.
Next we discuss how to deal with a binomial-like framework in which con-
dition (c) is violated.
Generalized Binomial Sampling*. Suppose that n independent experi-
ments are performed and that an event A has a probability of p
i
of appearing
in the ith experiment.
We are interested in the probability that A appeared exactly k times in
the n experiments. The binomial setup is not directly applicable since the
probabilities of A differ from experiment to experiment. However, the bi-
nomial setup is useful as a hint on how to solve the general case. In the
binomial setup the probability of k events A in n experiments is equal to

144 5 Random Variables
the coefficient of z
k
in the expansion of G(z) = (pz + q)
n
. Indeed, (pz + q)
n
=
p
n
q
0
z
n
+···+
¡
n
k
¢
p
k
q
n−k
z
k
+···+n pq
n−1
z + p
0
q
n
.
The polynomial G(z) is called the probability-generating function. If X
is a discrete integer-valued random variable such that p
n
=P(X = n), then its
probability-generating function is defined as
G
X
(z) =Ez
X
=
X
n
p
n
z
n
.
Note that in the polynomial G
X
(z), the probability p
n
=P(X = n) is the coeffi-
cient of the power z
n
. Also, G
X
(e
z
) is the moment-generating function m
X
(z).
In the general binomial setup, the polynomial (pz
+q)
n
becomes
G
X
(z) =(p
1
z +q
1
) ×(p
2
z +q
2
) ×···×(p
n
z +q
n
) =
n
X
i=0
a
i
z
i
(5.5)
and the probability that there are k events A in n experiments is equal to
the coefficient a
k
of z
k
in the polynomial G
X
(z). This follows from the two
properties of G(z): (i) When X and Y are independent, G
X +Y
(z) =G
X
(z) G
Y
(z),
and (ii) if X is a Bernoulli
B er(p), then G
X
(z) = pz +q.
Example 5.7. System with Unreliable Components. Let S be a system
consisting of ten unreliable components that work and fail independently of
each other. The components are operational in some fixed time interval [0,T]
with the probabilities
ps =[0.5 0.3 0.2 0.5 0.6 0.4 0.2 0.4 0.7 0.8];
Let a random variable X represent the number of components that remain
operational after time T.
Find (a) the distribution for X and (b)
EX and Var X.
ps =[0.5 0.3 0.2 0.5 0.6 0.4 0.2 0.4 0.7 0.8];
qs = 1- ps;
all = [ps’ qs’];
[m n]= size(all);
Gz = [1]; %initial
for i = 1:m
Gz = conv(Gz, all(i,:) );
% conv as polynomial multiplication
end
%at the end, Gz is the product of p
_
i x + q
_
i
%
sum(Gz) %the sum is 1
probs = Gz(end:-1:1);
k = 0:10
% probs=[0.0010 0.0117 0.0578 0.1547 0.2507 ...
% 0.2582 0.1716 0.0727 0.0188 0.0027 0.0002]
EX = k
*
probs’ %expectation 4.6
EX2 = k.^2
*
probs’;
VX = EX2 - (EX)^2 %variance 2.12
5.3 Some Standard Discrete Distributions 145
Note that in the above script we used the convolution operation conv to
multiply polynomials, as in
conv([2 -1],[1 3 2])
% ans = 2 5 1 -2,
which is interpreted as (2z −1) ·(z
2
+3z +2) =2z
3
+5z
2
+z −2.
From the MATLAB calculations we find that the probability-generating
function G(z) from (5.5) is
G(z)
= 0.00016128z
10
+0.00268992z
9
+0.01883264z
8
+0.07273456z
7
+
0.17155808z
6
+0.25816544z
5
+0.25070848z
4
+0.15470576z
3
+
0.05777184z
2
+0.01170432z +0.00096768,
and the random variable X , the number of operational items, has the following
distribution (after rounding to four decimal places):
X 0 1 2 3 4 5 6 7 8 9 10
Prob 0.0010 0.0117 0.0578 0.1547 0.2507 0.2582 0.1716 0.0727 0.0188 0.0027 0.0002
.
The answers to (b) are EX =4.6 and Var X =2.12.
Note that a “solution” in which one finds the average of the component
probabilities,
ps, as
¯
p =
1
10
(0.5 +0.3 +···+0.8) = 0.46, and then applies the
standard binomial calculation will lead to the correct expectation, 4.6, because
of linearity. However, the variance and probabilities for X would be different.
For example, the probability
P(X = 4) would be binopdf(4,10,0.46)=0.2331,
while the correct value is 0.2507.
(a) (b)
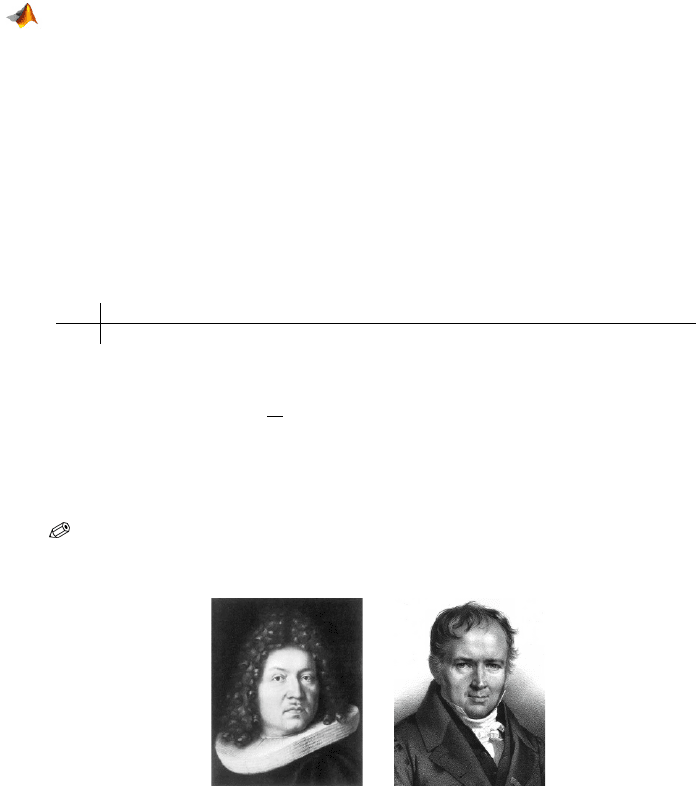
Fig. 5.3 (a) Jacob Bernoulli (1654–1705), Swiss mathematician and astronomer. His mono-
graph Ars Conjectandi, published posthumously in 1713, contains his explorations in prob-
ability theory, states a form of the law of large numbers, and describes experiments that
we call now Bernoulli trials. (b) Siméon Denis Poisson (1781–1840), French mathematician
and physicist. His book Recherches sur la probabilité des jugements en matières criminelles
et matière civile, published in 1837, applies probability theory to the decisions of juries. It
introduces a discrete probability distribution, now known as the Poisson distribution.