Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. 2008
Подождите немного. Документ загружается.

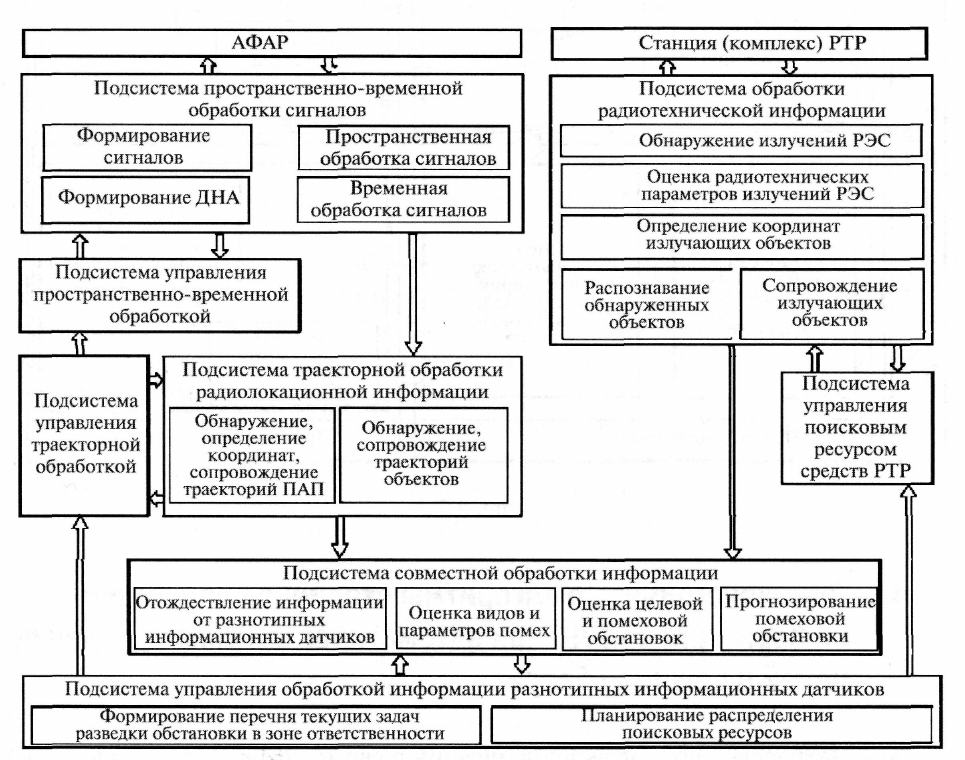
Учитывая сложившуюся структуру процессов цифровой обработки
информации, можно представить структуру обработки информации в БРЛС в
виде иерархической трехуровневой системы (рис. 4.6). Укрупненная блок-
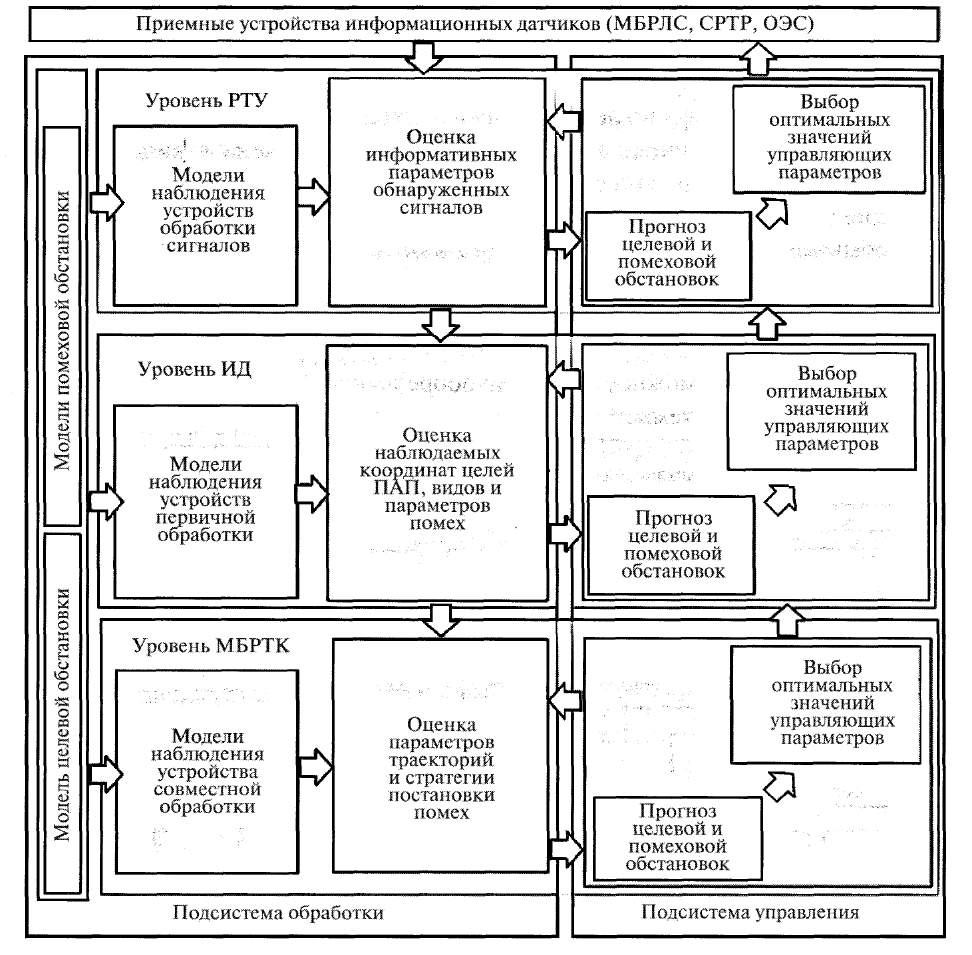
схема реализации конфликтно-устойчивого управления в БРЛС в интересах
повышения помехозащищенности может быть представлена в виде, показан-
ном на рис. 4.7.
Использование конфликтно-устойчивых алгоритмов управления процес-
сами добывания и обработки информации в БРЛС приводит к тому, что режи-
мы функционирования и обработки информации оптимизируются таким обра-
зом, чтобы, с одной стороны, обеспечить максимальное качество решения по-
ставленных задач в условиях воздействия различных типов помех, а с другой
стороны, снизить возможности противоборствующей стороны по разведке
функционирования системы.
Рис. 4.6
Авиационные комплексы радиолокационного дозора и наведения
Рис. 4.7
4.3. Помехоустойчивые алгоритмы вторичной обработки
информации в БРЛС при автоматическом сопровождении
целей в режиме обзора
Автоматическое сопровождение целей в режиме обзора [15] - один из ос-
новных режимов функционирования современных и перспективных БРЛС.
Этот режим позволяет непрерывно получать информацию обо всех целях в зо-
не ответственности и выявлять наиболее опасные и важные из них.
Одновременно с развитием техники радиолокации совершенствуются
средства РЭБ, создаются новые виды помех, интенсивно наращиваются воз-
можности по радиоэлектронному подавлению всех режимов работы БРЛС, в
том числе и АСЦРО. Поэтому обеспечение надежного функционирования
БРЛС в процессе автоматического сопровождения целей при обзоре простран-
ства в условиях воздействия помех различного происхождения - одна из слож-
нейших задач. Сложность обусловлена резким увеличением количества ин-
формации, поступающей на вход системы сопровождения целей, что затрудня-
ет выполнение процедур идентификации и сопровождения целей и может
привести к снижению точности оценивания их фазовых координат, возраста-
нию вероятностей перепутывания сопровождаемых траекторий, появлению
ложных траекторий и т. д.
Автоматическое сопровождение целей в режиме обзора, реализуемое в
процессе совместного функционирования БРЛС и цифровой вычислительной
системы, выполняется в несколько этапов, содержащих формирование первич-
ных измерений, завязку траекторий, экстраполяцию относительных фазовых
координат (траекторий) всех сопровождаемых целей в промежутках между по-
ступлениями от БРЛС результатов измерений, идентификацию поступающих
отметок на их принадлежность тем или иным экстраполируемым траекториям,
фильтрацию экстраполированных фазовых траекторий по результатам иденти-
фицированных измерений, ранжирование целей по степени их важности, сброс
сопровождаемых траекторий.
При автоматическом сопровождении целей в режиме обзора для подавле-
ния БРЛС наиболее вероятно использование следующих помех: непрерывных
шумовых; многократных синхронных импульсных; имитирующих импульс-
ных; комбинированных имитирующих и маскирующих; активно-пассивных.
Возможно применение одноточечных совмещенных с целью помех и простран-
ственно разнесенных (многоточечных) помех. Роль последних в настоящее
время существенно возрастает. В результате действия помех в БРЛС затрудня-
ется процесс привязки отметок к траекториям, возможны захват ложных траек-
торий и их сопровождение, срыв сопровождения истинных траекторий и пере-
грузка вычислительной системы.
Сопровождение целей в условиях помех - одна из сложнейших про-
блем автоматизации процессов вторичной обработки радиолокационной ин-
формации. Для ее решения разработано достаточно большое число различных
алгоритмов. Одним из таких помехоустойчивых алгоритмов вторичной обра-
ботки, наиболее пригодным для практики, является модифицированный алго-
ритм совместной вероятностной идентификации данных (JPDAM) [14].
Этот алгоритм предназначен для сопровождения близко расположенных це-
лей и целей, траектории которых могут пересекаться. При его реализации вы-
полняются следующие основные операции: экстраполяция вектора состояния
траектории цели, вычисление усредненной невязки, коррекция оценки векто-
ра состояния.
Применение алгоритма JPDAM позволяет эффективно решать задачу со-
провождения целей в режиме АСЦРО при воздействии уводящих помех, а так-
же маскирующих помех, вызывающих появление ложных отметок. Однако не-
достатком данного алгоритма является потребность в больших вычислитель-
ных возможностях аппаратуры.
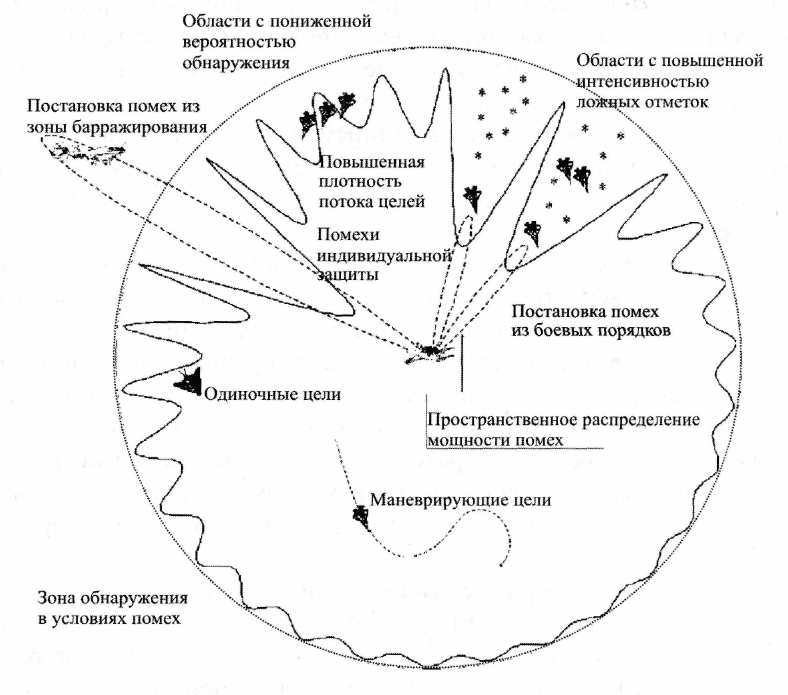
Классификация условий обстановки на уровне совместной обработки ин-
формации от разнотипных информационных датчиков БРЛС включает выделение
областей зоны ответственности, для которых характерны устойчивые особен-
ности воздушной и помеховой обстановки (рис. 4.8). Указанные особенности
характеризуются наличием как одиночных, так и групповых целей, влиянием
различных типов и параметров помех в различных секторах наблюдения.
Рис. 4.8
Конфликтно-устойчивое управление ресурсами разведки и защиты от по-
мех БРЛС должно содержать оценку пространственного положения постанов-
щиков помех, видов и параметров помех и выбор наиболее эффективных в
складывающейся помеховой обстановке способов поиска и обнаружения объ-
ектов. При выборе вариантов обработки информации в БРЛС необходимо про-
водить не только оценку целевой обстановки, но и детальную оценку помехо-
вой обстановки. Поэтому часть поискового ресурса БРЛС должна быть направ-
лена на оценку помеховой обстановки.
При оценке помеховой обстановки важными параметрами для оптимиза-
ции процесса поиска и сопровождения целей являются следующие:
местоположение постановщиков помех;
виды создаваемых помех;
чувствительность приемника исполнительной радиотехнической разведки
постановщика помех;
мощность создаваемых помех.
На основании оценок указанных параметров появляется возможность про-
гнозирования уровня и видов создаваемых помех при применении тех или иных
способов добывания информации и последующего выбора оптимальных из них.
Вследствие иерархической структуры БРЛС АК РЛДН термин «режим ра-
боты» может применяться к различным иерархическим уровням и к подсисте-
мам этих уровней. В частности, основным приемом при активной радиолока-
ции является зондирование обследуемого пространства, под которым подразу-
меваются излучение зондирующего сигнала, прием и обнаружение ответных
сигналов. Способы зондирования различаются параметрами излучаемых сиг-
налов, распределением излучаемой мощности по пространству и алгоритмом
обработки сигналов. Для решения задач поиска объектов и кх сопровождения в
зависимости от типов объектов и условий, в которых эти задачи решаются,
наиболее эффективными являются различные способы зондирования. Если
способ зондирования не изменяется в течение некоторого времени, например
БРЛС выполняет только задачу поиска наземных объектов, то имеют место оп-
ределенные закономерности в последовательности излучаемых сигналов, харак-
терные для решения конкретной задачи. При наличии таких закономерностей
могут использоваться термины «режим излучения», «режим зондирования»
или «режим работы БРЛС». Таким образом, под режимом функционирования
БРЛС в дальнейшем будем понимать установленный порядок излучения и об-
работки сигналов.
Управление - это обеспечение функциональной зависимости от времени
значений управляемых параметров (т. е. тех параметров, которые доступны для
подсистемы принятия решений). Если понятие «управление» распространяется
на объект, то имеется в виду управление этим объектом. Кроме того, под
управлением может подразумеваться сам процесс принятия решений, заклю-
чающийся в последовательном выборе значений управляемых параметров в
динамике функционирования объекта. Такое расширение понятия управления
вполне уместно, но при этом теряется однозначность его трактовки.
Поиск и обнаружение включают обзор области ответственности и приня-
тие решения о наличии или отсутствии в элементах разрешения разведываемых
объектов. Частным показателем, характеризующим качество решения данной
задачи, является время обнаружения реально существующего объекта в зоне
ответственности, отсчитываемое от момента его появления. Требования к
этому показателю должны быть заданы в виде функции на множестве наблю-
даемых параметров, возрастающей по мере увеличения расстояния от области
ответственности и отражающей степень опасности появления целей в различ-
ных областях зоны ответственности. Данная задача может быть представлена в
виде последовательности задач обнаружения целей в элементах разрешения и
принятия решения о наличии целей. Вторая задача может решаться как по ре-
зультатам накопления информации в течение нескольких обзоров, так и путем
поиска в ограниченной области пространства. Форма реализации может зави-
сеть от требований к частному показателю.
Ограничение в скорости изменения управляемых параметров определяется
инерционностью процессов при перестройке ФАР. В современных ФАР мак-
симальная частота перестройки составляет 200 Гц (5 мс), что соответствует
дальности 750 км. Таким образом, при описании процесса управления ФАР
можно использовать в качестве единицы измерения рабочий такт, минимальная
величина которого равна длительности интервала времени, необходимого для
выполнения одной элементарной операции. В принципе величина рабочего
такта может быть изменяемой, но не меньше минимально возможной.
В течение рабочего такта ФАР занята выполнением элементарной опера-
ции, направленной на решение одной, из частных задач БРЛС. В числе решае-
мых БРЛС задач в условиях воздействия активных помех необходимо реализо-
вать следующие:
анализ помеховой обстановки и конфликтно-устойчивое управление ком-
плексом с учетом измеренных параметров помех;
обзор (просмотр зоны обзора) при обнаружении воздушных (наземных,
надводных) целей;
непрерывное сопровождение отдельной цели (дискретное сопровождение);
разрешение целей в группе;
распознавание типов целей;
поиск цели в ограниченном объеме пространства;
картографирование или обзор земной (морской) поверхности (при помощи
обычного луча, с доплеровским обострением луча, с синтезированием аперту-
ры), селекцию движущихся целей;
поиск и обнаружение ориентиров.
При решении одной из указанных задач используются специфические для
них виды сигналов, параметры этих сигналов, способы распределения излу-
чаемой энергии по пространству и алгоритмы пространственно-временной об-
работки сигналов. В связи с указанной особенностью выделяют режимы рабо-
ты БРЛС, соответствующие решаемым ею задачам. При решении одновре-
менно нескольких задач считается, что БРЛС работает в нескольких режимах
одновременно. Такое упрощенное представление о процессе функционирова-
ния системы отражает только внешнюю сторону и не позволяет перейти к де-
тализации ее описания в динамике. Поэтому режим функционирования
АК РЛДН молено определить как установленный порядок применения раз-
личных способов добывания и обработки информации. Основным режимом
функционирования АК РЛДН при ведении разведки следует считать такой
порядок применения способов добывания и обработки информации, который
является оптимальным для наиболее общих или наиболее вероятных условий
обстановки.
Вполне вероятно, что ресурсы ФАР могут быть разделены таким образом,
что одновременно будет выполнено несколько различных задач. В этом случае
произойдет разделение не по времени, а по энергетике.
Зависимость состава решаемых частных задач от времени можно предста-
вить в виде вектора z(t)-iz
1
(t),...,z
N
(t)), компоненты которого принимают
значения ноль, если в момент времени
t
соответствующая задача (работа, вид
работы) не выполняется, и единица - в противном случае. Состав решаемых
задач не может быть определен с учетом текущей обстановки, а должен фор-
мироваться на основе требуемого качества отображения разведываемой обста-
новки. В том случае, когда одновременно на некотором интервале времени ре-
шается более одной задачи, временной и энергетический ресурсы должны быть
распределены между этими задачами. Выбор возможного способа распределе-
ния ресурсов ограничивается возможностями ФАР и определяется путем опти-
мизации по критерию достижения некоторой цели функционирования в тече-
ние определенного интервала времени.
Принятие решения о распределении поисковых ресурсов принимается на
основании оценки возможностей АК РЛДН по ведению разведки в текущих ус-
ловиях помехово-целевой обстановки.
Управление в реальном масштабе времени по большому числу изменяе-
мых параметров сводится к целенаправленному «включению» соответствую-
щих условиям применения вариантов функционирования (цифровой обработки
Ρ ЛИ). Изменение требований к информации в динамике конфликта задает из-
меняющуюся цель функционирования АК РЛДН, что приводит к необходимо-
сти коррекции управления даже при стационарных (сложившихся) условиях
обстановки.
Реализация принципа иерархической организации оптимального управле-
ния на вышестоящей иерархической ступени обработки информации заключа-
ется в выборе таких способов, которые в текущих условиях являются опти-
мальными, а на нижестоящей иерархической ступени - в детализации условий
и подборке по ним оптимальных параметров для соответствующего уровня.
Активное поисковое усилие заключается в излучении определенного вида
сигнала заданной мощности в направлении на постановщик помех и анализе
реакции в виде ответных излучений с целью установления порога обнаружения
станцией РТР и способа реакции постановщика помех на данный вид сигнала.
Прием и анализ создаваемых ответных помех может осуществляться как при-
емным устройством БРЛС с ФАР, так и станцией РТР, входящей в состав
АК РЛДН. Пассивное поисковое усилие состоит в разведке излучений, посту-
пающих с направлений, на которых могут находиться постановщики помех, без
излучения зондирующих сигналов. Разведка излучений может выполняться в
заданной области пространства при помощи РЛС или совместно со станцией
РТР. Применение станции РТР позволяет освободить поисковый ресурс БРЛС.
Для повышения качества разведки станции РТР могут выдаваться целеуказания
по частоте и угловому направлению.
При анализе помеховой обстановки выделяются следующие ситуации:
постановка помех (ПП) индивидуальной защиты;
постановка помех групповой (коллективной защиты) из боевых порядков
(в этом случае ПП впереди группы самолетов);
постановка помех из зон барражирования.
Для каждой ситуации выполняются определенные закономерности в по-
становке помех и вырабатываются соответствующие им способы борьбы с по-
мехами, основанные на более детальном анализе имеющихся сведений о воз-
душной обстановке, видах и параметрах излучаемых помех и закономерностей
в постановке этих помех.
При анализе помеховой обстановки также должна отслеживаться законо-
мерность между излучением сигнала в определенных направлениях и ответной
реакцией противника, выраженной в постановке ответных активных помех, а
также временем реакции и степенью адекватности создаваемых помех. Такой
анализ совместно с имеющейся информацией о целевой обстановке позволит
определить местоположение средств радиотехнической разведки противника,
разнесенных в пространстве со средствами постановки помех.
Для обеспечения возможности принятия решений о выборе той или иной
структуры обработки информации на этапе проектирования обосновывается
минимально достаточное, но эффективное в диапазоне прогнозируемых усло-
вий применения множество режимов функционирования АК РЛДН, содержа-
щее совокупность вариантов добывания и обработки информации, относящих-
ся к различным иерархическим уровням построения системы обработки ин-
формации. При этом неэффективными считаются такие алгоритмы, которые не
являются предпочтительными по отношению к другим при любых условиях и
по любым показателям. Например, сравнение алгоритмов оценивания парамет-
ров траекторий, основанных на калмановской фильтрации и а-, β-фильтрации
показывает, что при решении разных задач и различных условиях обстановки
каждый из них может иметь преимущества перед другим. Если первый из этих
алгоритмов существенно точнее в стационарных условиях обстановки, то вто-
рой алгоритм значительно устойчивее при нестационарных флуктуациях траек-
тории движения сопровождаемого объекта.
В соответствии с иерархической структурой системы обработки информа-
ции в АК РЛДН при проектировании БРЛС могут быть определены следующие
альтернативные варианты функционирования.
Способы зондирования пространства:
использование различающихся видов зондирующих сигналов (сложные:
ФКМ, ЛЧМ и др., простые импульсы, пачки импульсов и др.) с различной час-
тотой повторения импульсов, изменением частоты повторения импульсов, из-
менением вида сигнала или несущей частоты от импульса к импульсу, измене-
нием параметров зондирующих сигналов (мощность или длительность);
использование различных способов обзора пространства (с узкой или ши-
рокой диаграммой направленности) и способов поиска целей в зоне ответст-
венности (последовательный, случайный, управляемый и др.).
Способы определения координат объектов:
угломерно-дальномерный;
разностно-дальномерный;
суммарно-дальномерный;
угломерно-разностно-дальномерный (в зависимости от возможного соста-
ва информационных датчиков).
На этапе траекторной обработки информации при обнаружении целей
должны использоваться алгоритмы с управляемыми критериями принятия
решений об обнаружении траекторий и сбросе с сопровождения; при оценке
параметров траекторий должны использоваться алгоритмы устойчивой
фильтрации с управляемой памятью (для стабилизации ошибок при флуктуа-
циях траекторий целей) и возможностью применения разнотипных измерений
(координатные отметки, пеленги, разности дальностей, суммы дальностей) для
оценивания текущих параметров траекторий; при сопровождении траекторий
должны использоваться алгоритмы сопровождения одиночных целей (с раз-
личными гипотезами о характере флуктуации их траектории), групповых (для
различных условий плотностей целей в группе, размеров групп и их численно-
го состава), маневрирующих целей (различающихся интенсивностью и видом
маневра), алгоритмы сопровождения в условиях интенсивного потока ложных
отметок.
На этапе совместной обработки информации должны применяться алго-
ритмы совместной обработки разнотипных измерений в зависимости от со-
става информационных датчиков: алгоритмы, основанные на методах триангу-
ляции или самотриангуляции, предполагающие использование информации
оповещения от взаимодействующих источников информации; алгоритмы объе-
динения и отождествления разнотипной информации от различных источни-
ков; алгоритмы распознавания целей по разнотипной информации и определе-
ния боевого порядка групп целей.
Общая схема организации управления в АК РЛДН в условиях РЭП осно-
вана на введении обобщенного показателя эффективности для каждого из ие-
рархических уровней обработки информации. Выбор способа функционирова-
ния БРЛС осуществляется по критерию максимизации этого показателя в иден-
тифицируемых условиях обстановки.
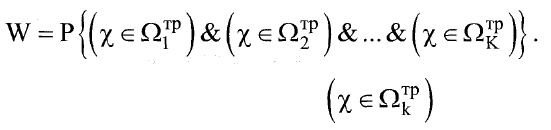
Обобщенный показатель эффективности, представленный в виде вероят-
ности обеспечения требований потребителей к качеству информации, зависит
от ряда свойств частных характеристик выдаваемой информации. Указанные
свойства проявляются в виде совместного закона распределения частных ха-
рактеристик. Наличие разнородных потребителей учитывается следующим об-
разом.
Каждый потребитель предъявляет требования к информации по опреде-
ленному составу характеристик. Следовательно, для каждого потребителя оп-
ределено нечеткое множество требований в специфичном для данного потре-
бителя пространстве характеристик: Ω£
ρ
a Q
k
. Характеристика информации
представляет собой числовую функцию, заданную на пространстве оценок об-
становки, т.е. это функция от выданной в течение функционирования БРЛС
АК РЛДН информации данному потребителю. В связи со случайным характе-
ром оценки обстановки характеристики информации также являются случай-
ными величинами. Совместный закон их распределения может быть представ-
лен многомерной функцией плотности распределения вероятностей f(%). Тогда
обобщенный показатель можно определить следующим выражением:
Учитывая, что события статистически зависимы, используя
формулу полных вероятностей, можно получить выражение для W через инте-
гралы от функции ί(χ)πο нечетким множествам.
Закон распределения характеристик информации ί(χ) зависит от ряда фак-
торов, обусловленных как действиями противостоящей стороны, так и дейст-
виями АК РЛДН по добыванию информации в условиях радиоэлектронного
подавления.
Особенность обобщенного показателя качества состоит в том, что он мо-
жет быть оценен только путем сравнения реальной обстановки и оценки обста-
новки, выдаваемой АК РЛДН. Сведения о реальной обстановке не могут быть