Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. 2008
Подождите немного. Документ загружается.

ется возможность определять однозначно только направление движения объек-
та. Если комплекс перемещается по непрямолинейной траектории, то по четы-
рем измерениям пеленга и навигационным данным можно вычислять коорди-
наты и вектор скорости данных целей. На практике вследствие того, что изме-
рения пеленгов содержат ошибки и траектория движения носителя БРЛС не
всегда допускает изменения (или она заранее неизвестна), фактическая точ-
ность сопровождения ИЦ по собственной пеленговой информации данным
способом недостаточна. Поэтому разработка метода самотриангуляции, осно-
ванного на обработке собственной пеленговой информации в БРЛС и позво-
ляющего повысить точность оценивания параметров движения ИЦ, является
практически важной для повышения помехозащищенности комплекса.
Пусть состояния траектории ИЦ и носителя (подвижного пеленгатора) в де-
картовой неподвижной системе координат заданы соответствующими векторами:
где - координаты цели (носителя); - проекции векторов
скорости в i -й момент времени - период дискретного об-
зора); - четырехмерное пространство состояний траекторий.
Тогда значения вектора состояния §
Λ
цели, движущейся по линейной тра-
ектории, в i-и η -й моменты времени связаны выражением
где В - матрица перехода состояний для прямолинейного равномерного дви-
жения.
Значение азимута цели относительно комплекса в момент времени t
A
оп-
ределяется функцией наблюдения:
В большинстве практических ситуаций справедливо предположение о
нормальном законе распределения ошибок измерения пеленга. Тогда функция
правдоподобия для вектора состояния s)J может быть записана в виде
где φ; - измеренное значение азимута на i-м обзоре; σ
2
- дисперсия ошибок
измерения азимута.
Потенциальную точность определения параметров траектории излучаю-
щих объектов можно оценить при помощи информационной матрицы Фишера.
Исходя из определения этой матрицы, можно получить выражение для инфор-
мационной матрицы:
Ранг информационной матрицы равен размерности подпространства на-
блюдаемых параметров движения цели в пространстве состояний. Если число
измерений пеленга не менее четырех и траектория пеленгатора не является пря-
молинейной равномерной, то ранг матрицы Φ равен четырем. В этом случае
имеется возможность получить оценку параметров траектории движения цели.
Если комплекс перемещается равномерно прямолинейно, то ранг матрицы
Φ не превышает трех. В этом случае предлагается разделить оцениваемое про-
странство состояния на прямую сумму подпространств наблюдаемых и нена-
блюдаемых параметров траекторий путем введения подвижной полярной сис-
темы координат.
Рассмотрим преобразование информационной матрицы Φ в подвижную
полярную систему координат , связанную с декартовой системой
координат соотношениями
где Д - расстояние от пеленгатора до цели; φ - текущий азимут; г, τ - отно-
шения радиальной и тангенциальной составляющих вектора относительной
скорости цели к Д.
Экстраполированные значения состояний траектории на один шаг в новой
системе координат определяются следующим нелинейным преобразованием:
где
Матрица Φ преобразуется к виду
где
Таким образом, если траектория носителя линейна, то наблюдаемыми па-
раметрами являются φ, г, τ. Если τ = 0 (что соответствует такой траектории це-
ли, при которой величина азимута постоянна), то, как видно из последнего вы-
ражения для матрицы Φ, ее ранг равен двум. Наблюдаемыми параметрами в
этом случае являются φ, τ.
На практике, как правило, известны пределы значений дальности и абсо-
лютной величины скорости цели, которые можно рассматривать как априор-
ную информацию о параметрах ее траектории.
Предположим, что априорная информация о траектории цели задана в ви-
де матрицы точности Ф
а
. В этом случае функция правдоподобия для вектора
состояния записывается в виде [6]
где s
a
- некоторая априорная оценка вектора состояния.
В выражение для информационной матрицы добавляется при этом допол-
нительное слагаемое Ф
я
.
Наличие априорной информации только о дальности не влияет на точ-
ность оценивания наблюдаемых параметров движения. Точность оценивания
дальности не зависит от числа измерений пеленга и значений остальных пара-
метров. Наличие априорной информации о величине скорости цели позволяет
повысить точность оценок параметров г их.
Оптимальная оценка вектора состояния траектории цели по критерию мак-
симума функции правдоподобия является решением уравнения ,
которое можно представить в виде
Полученное уравнение является нелинейным относительно sJJ.
Для вычисления оценки вектора состояния в соответствии с ним требуется
применить сложные вычислительные процедуры, поэтому целесообразно рас-
смотреть возможность нахождения приближенных оценок более простым путем.
Оценку вектора состояния траектории цели будем проводить в от-
носительной системе координат, связанной с БРЛС АК РЛДН:
Допустим, что на текущем обзоре получено измерение ф
п
и известна ап-
риорная информация о значении вектора состояния на предыдущем обзоре,
представленная матрицей точности Ф
а
и оценкой вектора состояния s
a
. Тогда
уравнение преобразуется к следующему [6]:
Следовательно,
Введем обозначения
С учетом этих обозначений уравнение для оценки параметров траектории
ИЦ можно представить в виде
Для того чтобы получить приближенное решение этого уравнения, разло-
жим функции в ряд Тейлора в точке s = s
3
и подставим в дан-
ное уравнение, пренебрегая членами, нелинейными по As :
где
Решая полученное уравнение относительно As получим выражение для
оценки вектора состояния [6]:
Следует отметить, что если пренебречь величиной вторых производных
функции наблюдения, то используя лемму об обращении матриц можно полу-
чить выражение для оценки вектора состояния, совпадающее с соотношением
фильтра Калмана.
В связи с тем, что размерность подпространства наблюдаемых параметров
зависит от вида траектории АК РЛДН, обращаемая матрица в уравнении для
оценки вектора параметров траектории ИЦ может оказаться плохо обусловлен-
ной при большой априорной неопределенности о дальности до излучающего
воздушного объекта. Поэтому при прямолинейной равномерной траектории
пеленгатора представление вектора состояния в декартовой системе координат
нецелесообразно.
Представление вектора состояния в полярной системе координат с огра-
ничением вектора состояния на подпространство наблюдаемых параметров по-
зволяет обеспечить устойчивость процесса оценивания параметров траектории.
Из приведенных выше соотношений следует, что на прямолинейном уча-
стке траектории АК РЛДН оценивается величина вектора скорости цели в от-
носительной системе координат, а на нелинейных участках - в неподвижной
системе координат. В связи с этим при пересчете значений вектора состояния
цели в различные системы координат необходимо учитывать текущее значение
вектора скорости пеленгатора.
На участках разворота комплекса представляет интерес исследование за-
висимости ошибок оценивания дальности до цели од от длительности процесса
обработки пеленговой информации при фиксированном периоде обзора. Для
известных априорных данных, в которых могут находиться значения дальности
(Д
тк1
, Д
тах
) и скорости излучающего объекта V
max
, матрица точности опреде-
ляется как
где
Вычисление оценок σ
Λ
для определенных исходных данных (Д
тах
= 650 км,
Д
т
|
п
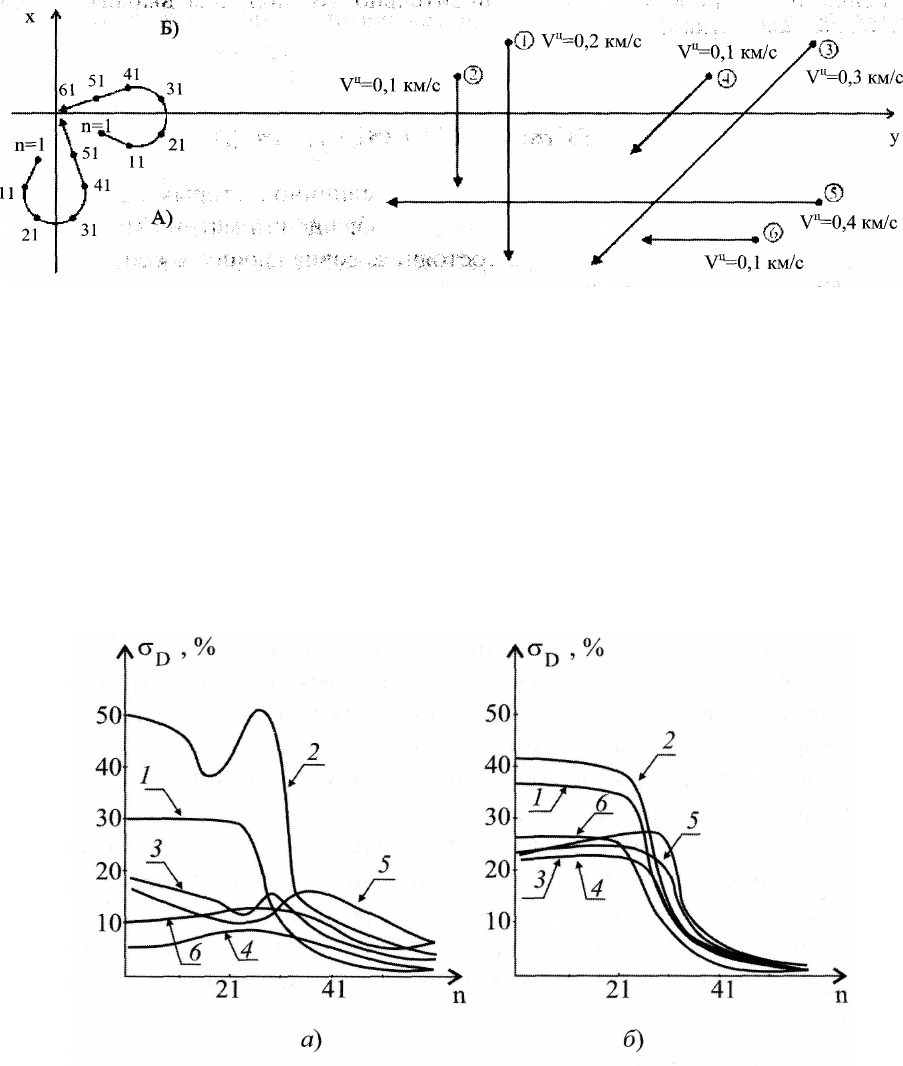
=50км, σ =0,5°) проведено методом статистических испытаний для
шести вариантов траектории излучающих объектов и двух вариантов траекто-
рий комплекса, которые показаны на рис. 4.17.
Рис. 4.17
На рис. 4.18, а и 4.19, а приведены выраженные в процентном отношении
от дальности до излучающих объектов зависимости значений σ
0
, обеспечивае-
мые алгоритмом сопровождения пеленговых траекторий, на рис. 4.18, б и
4.19, б для сравнения показаны потенциальные значения а
д
, полученные в ре-
зультате вычисления информационной матрицы.
Рис. 4.18
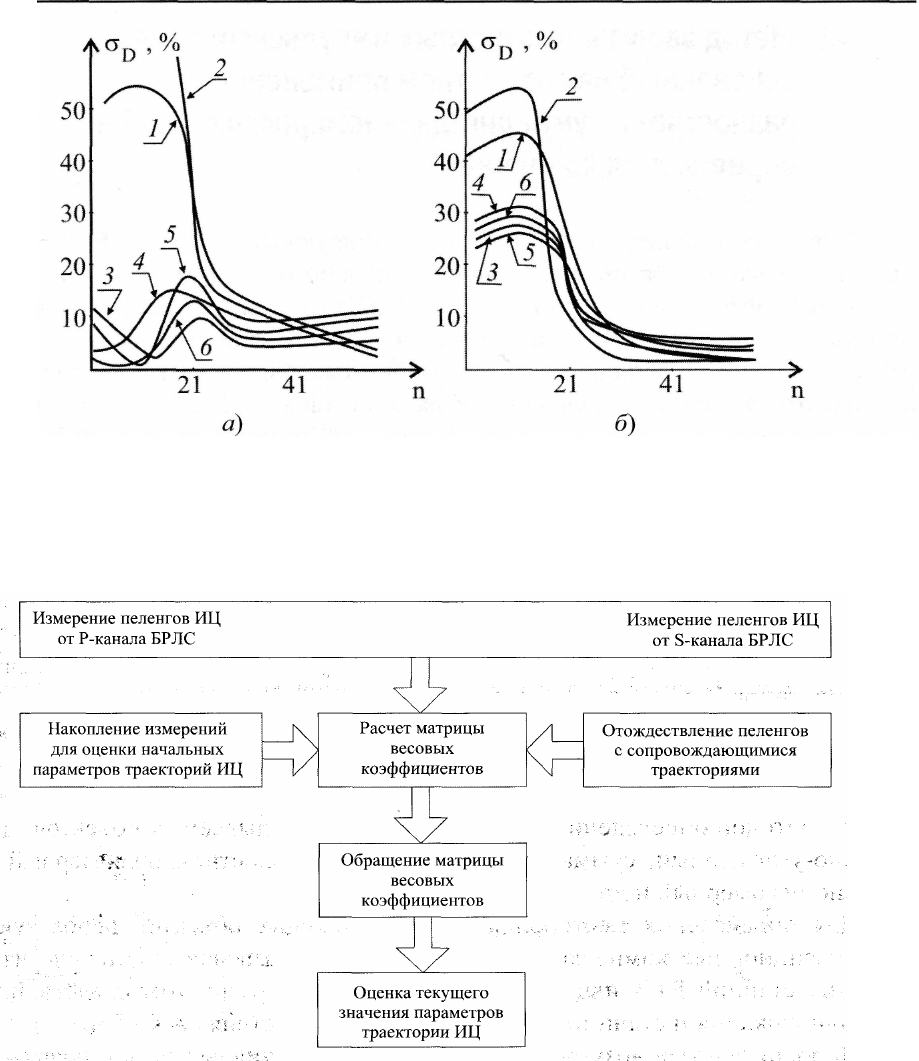
Рис. 4.19
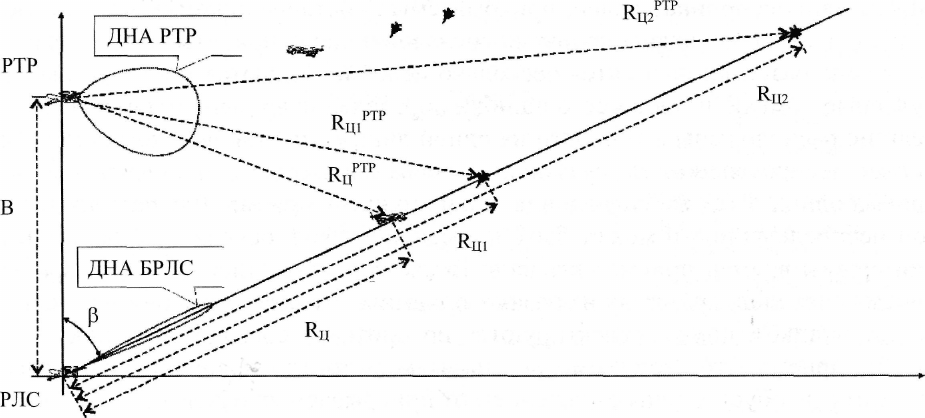
Обобщенная блок-схема алгоритма самотриангуляции, выполненного в
соответствии с приведенными выше расчетными соотношениями, показана на
рис. 4.20.
Рис. 4.20
Таким образом, для достижения высокой точности оценки параметров
траекторий сопровождаемых ИЦ требуется либо введение длительного интер-
вала обработки измерений в БРЛС, либо реализация, как минимум, асинхрон-
ного режима обмена пеленговой информацией между взаимодействующими
комплексами. При полностью автономной работе формируемая траектория
АК РЛДН должна обеспечивать максимизацию изменения (по модулю) прово-
димых измерений пеленгов, осуществляемых в дискретные моменты времени.
4.5. Метод защиты от ответных импульсных помех,
основанный на совместном применении
разностно- и суммарно-дальномерного способов
определения координат
Ответной реакцией на излучение зондирующего сигнала БРЛС может
быть не только отраженный сигнал от воздушного объекта, но и излученные
целью активные радиопомехи индивидуальной защиты, что также демаскирует
разведываемый объект. В связи с этим, предполагая наличие подобной реакции
от цели, излучение зондирующих сигналов может выполняться не только для
анализа отражений зондирующего сигнала, но также и с целью формирования
разведываемым объектом ответных излучений. Применение станций РТР в со-
ставе информационных датчиков АК РЛДН предоставляет дополнительные
возможности по обнаружению объектов по их излучениям, детальному анализу
помеховой обстановки и реализации многопозиционных активно-пассивных
способов радиолокации.
Излучающие РЭС, в том числе и постановщики имитирующих помех, мо-
гут быть идентифицированы станцией радиотехнической разведки. При этом
возможно не только определение координат излучающих объектов, но и распо-
знавание типов РЭС.
Совместное применение БРЛС с ФАР и станций РТР позволяет опреде-
лить местоположение целей с использованием активных, активно-пассивных и
пассивных методов радиолокации, при этом возможна реализация многочис-
ленных методов определения местоположения разведываемых объектов: даль-
номерно-угломерный, суммарно-дальномерный, разностно-дальномерный, уг-
ломерно-угломерный и др.
Для определения местоположения излучающих объектов используются
многопозиционные комплексы радиотехнической разведки, состоящие из не-
скольких станций РТР, или комплексирование информации от средств актив-
ной радиолокации и станции РТР при групповых действиях АК РЛДН.
Дополнительные возможности по защите от активных помех появляются
при использовании информации от разнесенных источников. Применение разно-
стно-дальномерного или суммарно-дальномерного метода определения коорди-
нат предполагает наличие, как минимум, одного источника всенаправленного
излучения зондирующих сигналов и трех разнесенных приемных устройств. Ес-
ли излучение направленное, то достаточно двух разнесенных приемных пунктов
(в качестве одного из них может использоваться радиолокационная станция). То-
гда определение координат выполняется по известному направлению излучения
и по оценке суммы или разности дальностей до обнаруживаемого объекта. Такой
метод может применяться в условиях постановки противником ответных им-
пульсных помех группового прикрытия для обнаружения объектов, находящихся
за постановщиком помех относительно АК РЛДН.
Разность времен приема зондирующего сигнала пропорциональна разно-
сти дальностей до излучающего объекта и однозначно определяет гиперболоид
возможных положений цели, от которой этот сигнал отражен или которая из-
лучила сигнал. Направление излучения зондирующего сигнала позволяет одно-
значно определить местоположение источника сигналов путем нахождения
точки пересечения с указанной гиперболой. Тем самым обеспечивается селекция
всех ложных отметок, создаваемых ПАП. Такой эффект наблюдается даже при
условии, когда помеха излучается антенной с широкой диаграммой направлен-
ности и воздействует на приемные устройства всех элементов многопозицион-
ной системы. В этом случае определяются также и координаты самого ПАП.
Принцип применения указанного способа селекции многократных им-
пульсных имитационных помех рассмотрим на примере многопозиционной
системы, в которой используются БРЛС АК РЛДН в качестве приемо-
передающего устройства с направленным излучением и вынесенная станция
РТР в качестве слабо направленного приемника излучений. Станция радиотех-
нической разведки находится на расстоянии В от БРЛС, которое называется
базой многопозиционной системы. Без ограничения общности можно полагать,
что постановщик активных помех находится в направлении β
π
относительно
линии, соединяющей элементы многопозиционной системы и на дальности R
n
относительно БРЛС, а прикрываемые постановщиком помех объекты располо-
жены вдоль линии визирования БРЛС-ПАП (рис. 4.21).
Рис. 4.21
За момент времени отсчета принимается момент излучения БРЛС зонди-
рующего импульса. После этого БРЛС и станция РТР выполняют прием сигна-
лов в течение времени, необходимого для прохождения излученным сигналом
расстояния до установленной максимальной дальности и обратно.
Время приема сигналов БРЛС, отраженных от целей, связано с расстояни-
ем до целей соотношением , где с - скорость света, а время приема
импульсных помех, создаваемых постановщиком помех, где
t
3
- задержка в излучении помехи после обнаружения зондирующего сигнала
средством исполнительной радиотехнической разведки постановщика помех.
Зависимость времени приема отраженных от целей сигналов станцией РТР
имеет вид , а зависимость времени приема импульсных по-
мех, создаваемых постановщиком помех,
Из указанных зависимостей следует, что при приеме сигналов, излучен-
ных постановщиком помех, разность времени приема этих сигналов БРЛС и
РТР не зависит от времени задержки излучения помехи:
а при приеме зондирующих сигналов от целей разность этих времен определя-
ется разностью расстояний до целей:
При уверенном приеме всех сигналов в АК РЛДН как станцией РТР, так и
БРЛС достаточно использовать разностно-дальномерно-угломерный метод для
определения координат целей, прикрываемых постановщиком помех, и самого
ПАП. Но когда возможны пропуски сигналов и число принятых сигналов вели-
ко: в зоне разведки находится несколько целей и создаются многократные им-
пульсные помехи, имеют место ошибки определения времени приема сигналов,
цели не расположены в точности на одной линии с постановщиком помех, воз-
никает неопределенность, связанная с невозможностью сопоставить моменты
приема одних и тех же сигналов на обоих пунктах приема. Для разрешения та-
кой неопределенности может быть применен подход, основанный на вычисле-
нии суммы времен приема сигналов. После сопоставления моментов времени
приема сигналов, принятых на разных приемных пунктах, сигналы, излученные
постановщиком помех, селектируются по признаку совпадения разности вре-
мен их приема, что дает возможность выявить только те зондирующие сигна-
лы, которые обусловлены отражением от прикрываемых объектов.
Для оценки точности данного метода, рабочей зоны многопозиционной
радиолокационной системы, а также оптимизации этой рабочей зоны может