Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. 2008
Подождите немного. Документ загружается.

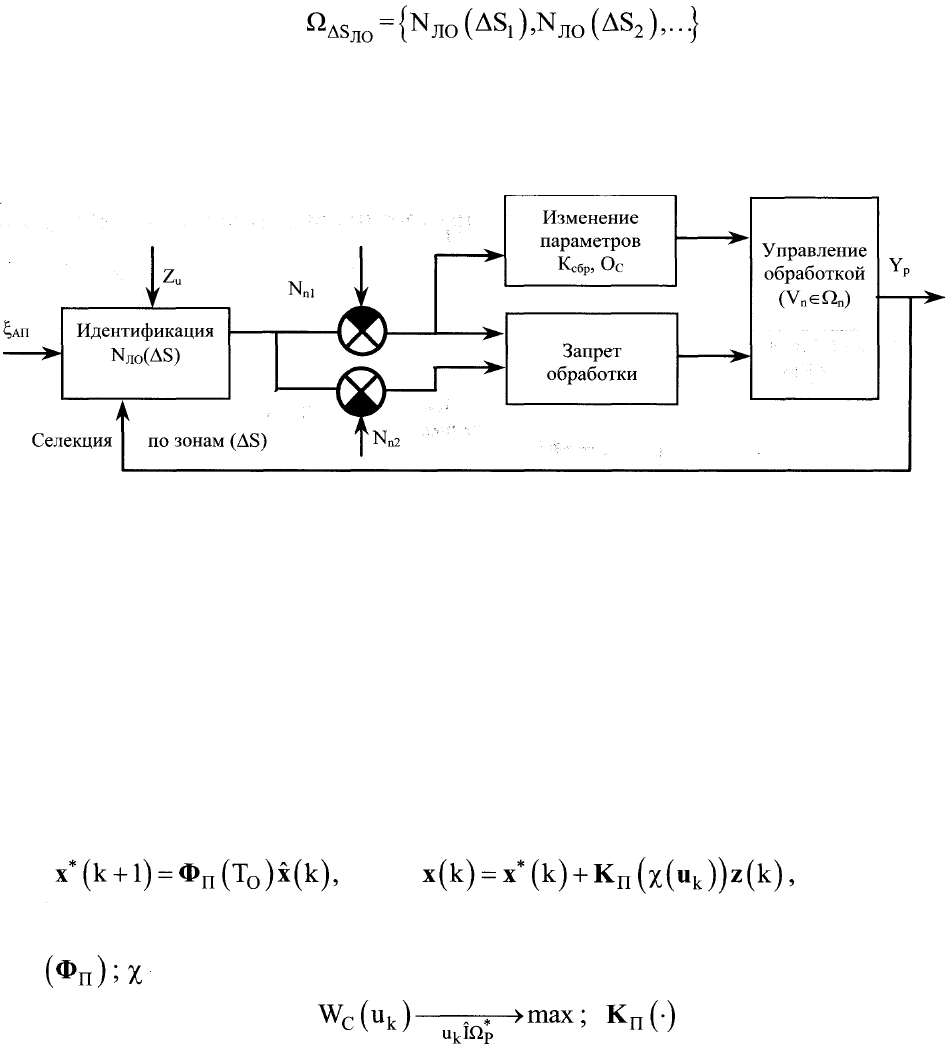
Проводимая оценка пространственного распределения AS интенсивности
потока ложных отметок в зоне S действия
БРЛС при воздействии импульсных помех позволяет реализовать соответст-
вующее управление обработкой (рис. 4.11) РЛИ и уменьшить за счет этого пе-
регрузки спецвычислителей по обработке информации в сложной целевой и
помеховой обстановке.
Рис. 4.11
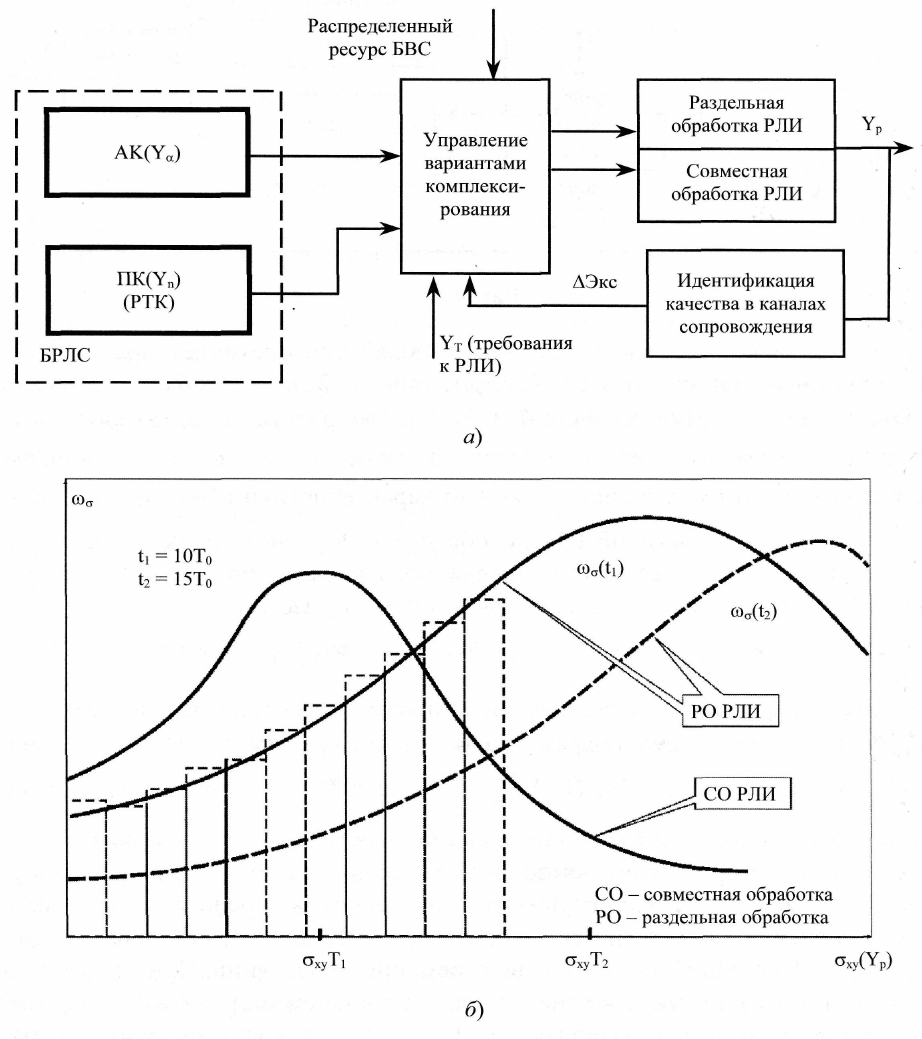
Динамическое управление режимами обработки и комплексирования раз-
нотипной информации в БРЛС АКРЛДН (рис. 4.12, а, б) необходимо обеспе-
чивать с учетом восстановленной ΦΠΡΒ \ν
σ
приоритетных характеристик для
конкретных решаемых системой задач. В частности, с учетом соотношения
требуемого σ и реализуемого значений характеристики и максимизации по-
казателей эффективности БРЛС при обеспечении разнородных потребителей
информации. При этом алгоритм управляемого комплексирования при «мерца-
нии» ПАП упрощенно записывается следующим образом:
где χ - вектор состояния, определяемый используемыми моделями движения це-
лей- управляемый параметр «включения» режимов комплексирования
на основе максимизации - матрица усиления,
определяемая рекуррентными соотношениями фильтра Калмана-Бьюси.
Управление процессами автосопровождения ПАП при одиночных (груп-
повых) действиях АК РЛДН осуществляется на основе предварительно прове-
денной оценки динамических свойств альтернативных режимов обработки пе-
ленговой информации в пространстве переменных состояний. При технических
(временных) ограничениях в каналах связи на возможности обмена информа-
цией между несколькими комплексами РЛДН в состав управляемых парамет-
ров дополнительно включается изменяемый параметр Е
А
о, характеризующий
темп асинхронного обмена пеленговой информацией между взаимодействую-
щими системами. При этом при минимальной загрузке каналов связи обеспе-
чивается существенное повышение точности оценивания координат длительно
излучающих целей-постановщиков активных помех за счет использования до-
полнительной пеленговой информации в каналах сопровождения. Аналогич-
ным образом можно использовать данный подход при организации режима
управляемой обработки пеленговой информации, получаемой от станции РТР.
Рис. 4.12
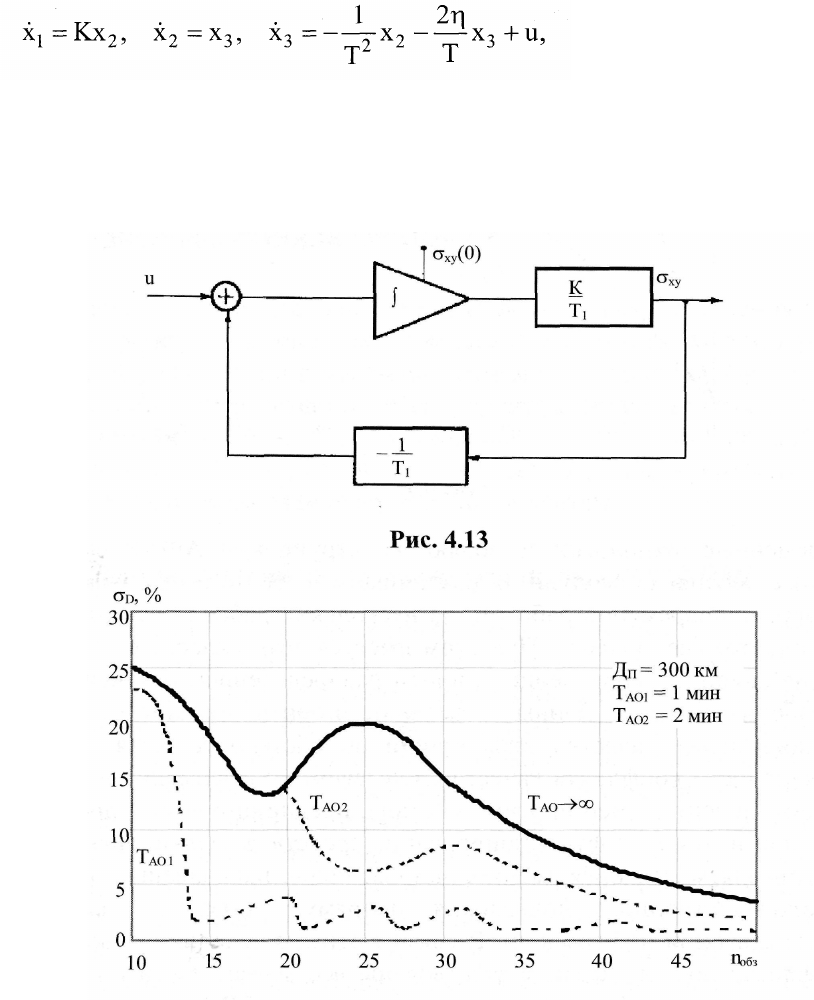
Имитационное моделирование функционирования подсистемы сопровож-
дения ПАП в пространстве состояний и последующая идентификация процес-
сов для различных вариантов внешних условий ξ
2
е Ωξ позволяет представить
эволюцию изменения ошибок оценивания координат σ
χγ
ПАП во времени ко-
лебательными для упрощенных расчетов апериодическими (см. схему в пере-
менных состояния апериодического звена, рис. 4.13) динамическими звеньями.
При этом для оценки переходных процессов восстанавливаются коэффициенты
следующей системы уравнений состояния [10]:
где х
3
~ σ u = l(t) - функция включения соответствующего режима сопрово-
ждения целей-ПАП, Τ,η,Κ - неизвестные параметры, определяющие динами-
ческие свойства «включаемого» режима (рис. 4.14).
Рис. 4.14
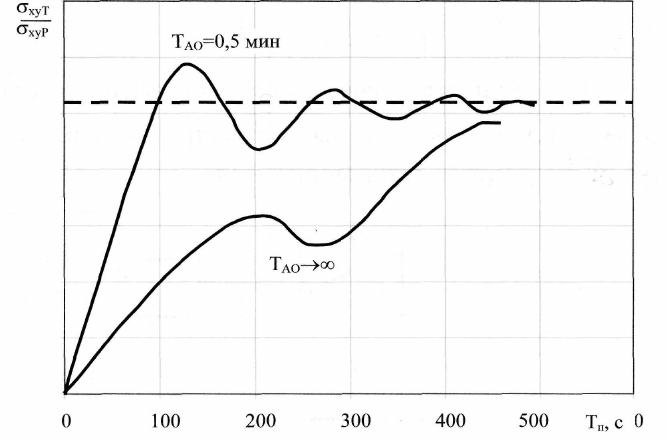
Моделирование типовых ситуаций применения показало, что вычисляемое
время Т
пп
переходного процесса установления ошибок определения координат
целей-постановщиков активных помех зависит как от геометрии АКРЛДН-
ПАП, так и от точности измерения угловых направлений на данные цели и реа-
лизуемого темпа асинхронного обмена пеленговой информацией (рис. 4.15).
Оценки в подсистеме управления БРЛС реализуемой точности сопровождения
ПАП в реальном времени определяют целесообразность «включения» данного
режима в комплексе.
Рис. 4.15
Современные технологии позволяют конструировать АФАР, содержащие
разнотипные активные модули с различными рабочими частотами. Такие
АФАР могут одновременно работать на нескольких рабочих частотах и излу-
чать многочастотные сигналы. При этом имеется возможность в БРЛС проек-
тировать независимое управление угловым распределением излучения на раз-
личных рабочих частотах. Данные возможности ориентированы в первую оче-
редь на повышение качества информации об обстановке, хотя в условиях
радиоэлектронного конфликта качество добываемой информации в значитель-
ной степени зависит от мер противодействия, предпринимаемых противостоя-
щей стороной в ответ на функционирование средств разведки. Поэтому обес-
печение управляемости информационных датчиков, направленное на компен-
сацию радиоэлектронного подавления, напрямую связано с повышением
качества добываемой информации. В связи с этим, в условиях радиоэлектрон-
ного конфликта должны быть задействованы все возможности по динамиче-
скому изменению способов добывания информации в БРЛС, реализуемые при
помощи технологий АФАР.
Основная задача при управлении процессами добывания и обработки ин-
формации АК РЛДН в динамике конфликта со средствами РЭП состоит в вы-
боре такой комбинации способов защиты от помех, при которой определяемое
качество информации будет наилучшим в текущих условиях помеховой и воз-
душной обстановки. Поэтому реализация мер защиты от помех только на уровне
первичной обработки не позволяет обеспечить конфликтную устойчивость
комплекса как разведывательно-информационной системы при целенаправлен-
ном радиоэлектронном подавлении. Для повышения помехозащищенности
БРЛС целесообразно комплексное применение совокупности мер на этапах
зондирования, обработки и комплексирования информации.
4.4. Методы и алгоритмы функционирования подсистемы
сопровождения целей-постановщиков активных помех
по пеленговой информации бортовой
радиолокационной системы
В условиях полного (частичного) радиоэлектронного подавления БРЛС це-
лесообразно организовать сопровождение целей-постановщиков активных помех
по пеленговой информации с восстановлением их координат. При этом аппа-
ратно-программными средствами БРЛС формируется подсистема сопровожде-
ния, на которую подаются от пилотажно-навигационного комплекса (ПНК) па-
раметры движения АК РЛДН и проводятся идентификация, накопление и об-
работка пеленгов по всем радиоизлучающим объектам.
4.4.1. Кинематический метод оценки координат целей-ПАП
Кинематический метод определения координат в пространстве состояний
(динамико-кинематический метод) основан на математическом описании в
пространстве состояний собственного или относительного движения цели и
самолета-носителя АКРЛДН. В качестве фазовых координат относительного
движения при таком описании выступают дальность до цели, скорость сближе-
ния, угловые координаты и угловые скорости линии визирования, а в качестве
фазовых координат собственного движения цели - прямоугольные координаты
и их производные. Результаты измерений пеленгов используются в алгоритмах
фильтрации, как правило, калмановской [3, 16]. Применительно к задаче опре-
деления координат и параметров собственного движения цели рассмотрим по-
становку задачи и один из возможных вариантов синтеза оптимального после-
довательного алгоритма оценивания вектора состояния подвижной наземной
(морской) радиоизлучающей цели, заимствованной из [2, 15, 16] и реализую-
щий кинематический метод восстановления координат.
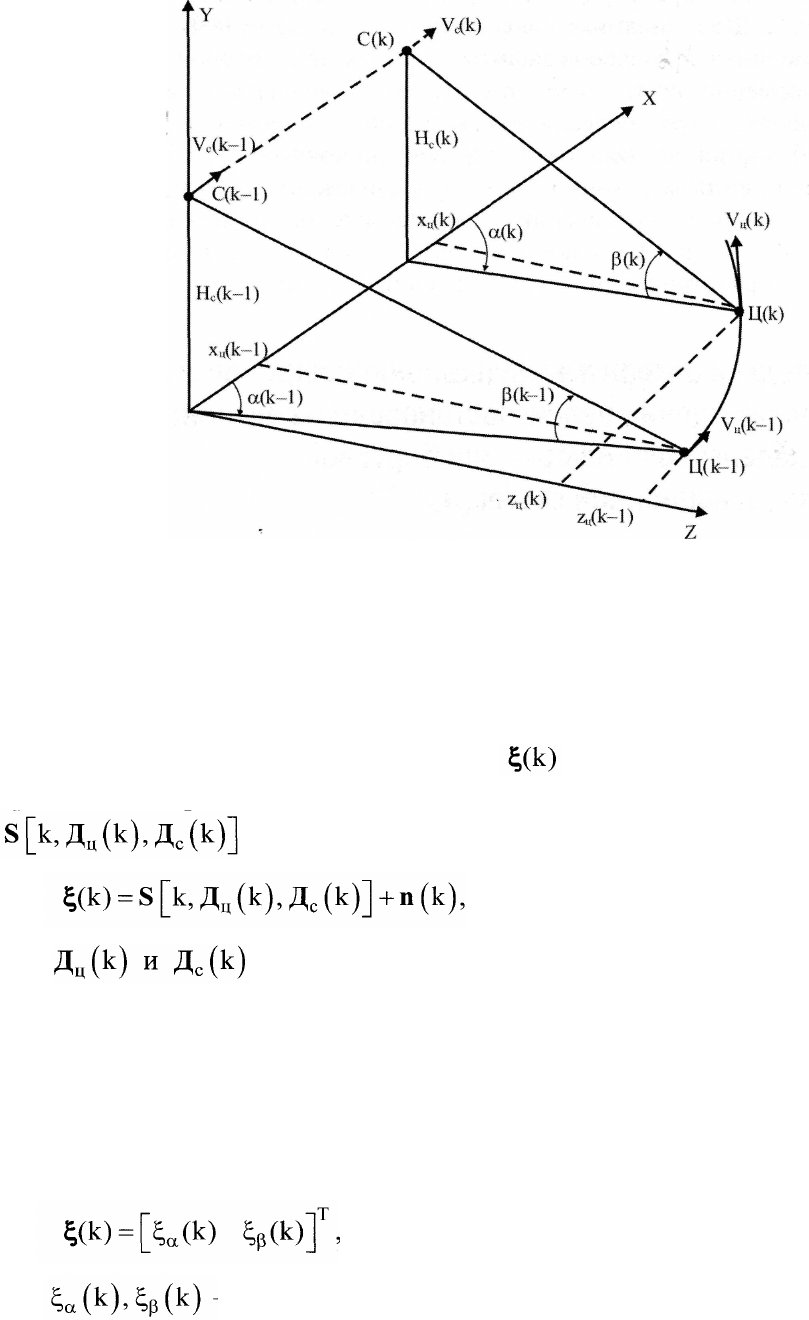
Рис. 4.16
Пусть самолет-носитель АК РЛДН, представленный на рис. 4.16 точкой
С, передвигается в неподвижной земной системе координат (НЗСК) OXYZ по
известной траектории и пусть при этом непосредственному наблюдению дос-
тупен дискретный случайный процесс , значения которого в моменты
времени к представляют собой аддитивную смесь полезного сигнала
и дискретного шума n(k):
(4.2)
где - векторы состояния движущейся цели и самолета-носи-
теля БРЛС соответственно.
Состав вектора наблюдения ξ^) определяется возможностями БРЛС по
измерению тех или иных пространственных и радиотехнических параметров
сигналов от подвижных целей. Допустим, что наблюдение пространственных
параметров сигналов от цели осуществляется по двум углам, поэтому вектор
наблюдения имеет вид
(4.3)
где - измеренные значения азимута и угла места соответственно.
Глава 4
Векторную функцию полезного сигнала, зависящую от текущих коорди-
нат самолета и цели, можно представить при помощи нелинейных относитель-
но Д
ц
(к) и Д
с
(к) выражений:
(4.4)
Вектор состояния Д
ц
(к) движущейся цели, от которой зарегистрирован
ξ^), в общем случае размерностью п, имеет в составе неизвестные параметры,
описывающие движение цели. В нашем случае компонентами этого вектора
являются координаты положения, скорость и ускорение цели по соответст-
вующим координатным осям:
где - текущие координаты цели в НЗСК, отображаемой точкой Ц
(рис. 4.16); - скорости и ускорения цели соот-
ветственно по координатам χ и ζ. Положение самолета в системе ΟΧΥΖ оп-
ределяется вектором состояния
Дискретный шум наблюдения
(4.5)
считается стационарным гауссовским белым шумом с нулевым математиче-
ским ожиданием и известной матрицей дисперсий
(4.6)
где - дисперсии ошибок измерения углов по каналам азимута и угла
места.
Для синтеза алгоритмов оценивания параметров радиоизлучающих объек-
тов помимо рассмотренной модели измерений необходимо располагать апри-
орными данными о возможном поведении объектов, т. е. моделью движения
цели - ПАП. При выборе модели движения маневрирующего объекта стремят-
ся к тому, чтобы описание этой модели было достаточно простым и в то же
время правильно отражало реальные траектории. Для различных классов объ-
ектов этому условию отвечают различные модели. Одной из наиболее широко
используемых на практике является динамическая модель движения [2], со-
гласно которой маневр рассматривается как стационарный случайный марков-
ский процесс с экспоненциальной функцией корреляции ускорения:
(4.7)
где <з\ - дисперсия ускорения объекта; - постоянная времени маневра, за-
висящая от его характера.
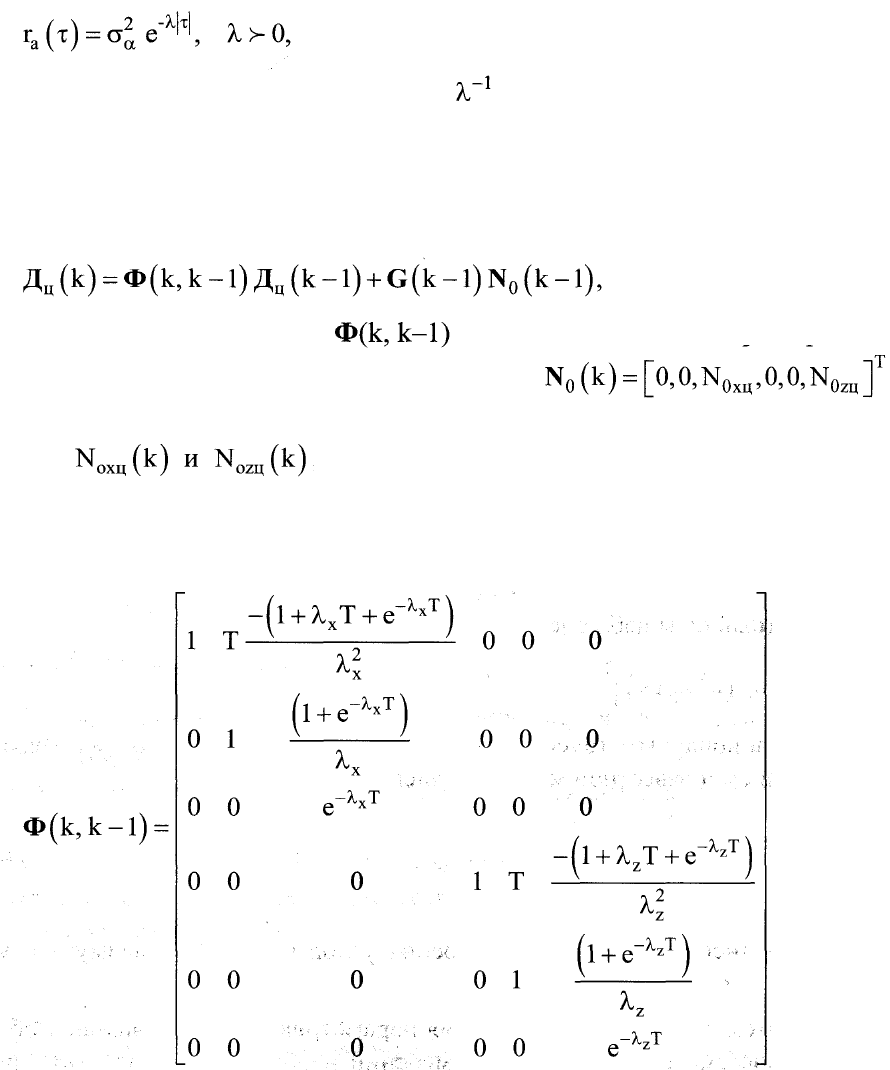
В матричной форме разностное уравнение состояния, соответствующее
модели Зингера для случая ведения наблюдения за движущейся целью в дис-
кретном времени, может быть представлено в виде [15]
(4.8)
где Дц(к) - вектор состояния; - фундаментальная матрица решений;
G(k-l) - переходная матрица возмущений; -
вектор формирующих белых шумов, составленный из независимых случайных
величин , распределенных по гауссовскому закону с нуле-
вым математическим ожиданием и единичными дисперсиями.
Применительно к решаемой задаче обработки фундаментальная матрица
Ф(к, к-1) имеет вид
/
с
(4.9)
Выражение для переходной матрицы возмущений G(k -1) приведено в [2], а
здесь для сокращения записей опущено.
Полученные уравнения состояния могут непосредственно использоваться
для построения алгоритма функционирования подсистемы сопровождения це-
лей - постановщиков активных помех. В соответствии с располагаемыми све-
дениями (4.2)-(4.9) имеем задачу нелинейной дискретной фильтрации. Извест-
но, что для получения точных алгоритмов нелинейной фильтрации марковских
процессов необходимо интегрировать уравнение Стратоновича. В общем слу-
чае эта задача неразрешима. Поэтому обычно рассматривают приближенные
способы решения. В данном случае используется алгоритм расширенного
фильтра Калмана, построенный на основе текущей линеаризации нелинейных
уравнений наблюдения. Эта методика основана на разложении коэффициентов
уравнения Стратоновича в ряд в окрестности точки оценки фильтруемого па-
раметра при условии, что имеет место малая ошибка фильтрации.
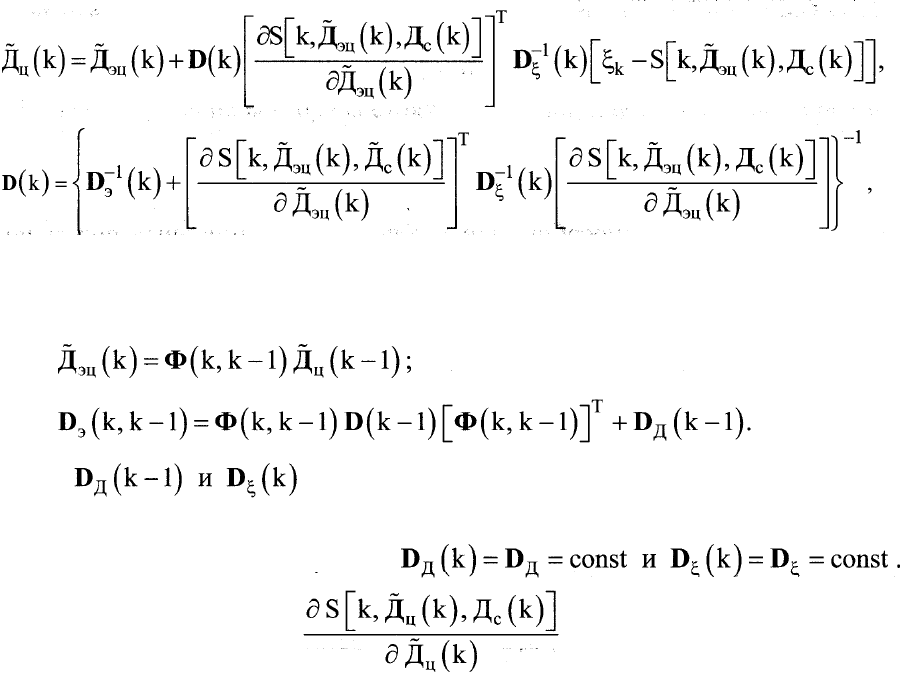
Разностные уравнения, определяющие значения оценки Д
ц
вектора со-
стояния и матрицы апостериорных дисперсий D(k) ошибок фильтрации в дис-
кретные моменты времени к, для метода текущей линеаризации имеют вид
(4.10)
(4.11)
где экстраполированные с шага (к-1) на шаг к оценки вектора состояния Д
эц
и
матрицы априорных дисперсий D определяются выражениями
(4.12)
(4.13)
Здесь - матрицы дисперсий белых гауссовских дискретных
шумов состояний и наблюдения, которые будем считать независимыми от номе-
ра шага фильтрации, в силу чего Под
векторной производной следует понимать матрицу раз-
мерностью m χ η производных полезного сигнала, где m, n - размерности со-
ответственно векторов наблюдения и состояния.
Для решения разностных уравнений (4.10)-(4.13) необходимо знать на-
чальные условия. При наличии в БРЛС априорной информации о цели, напри-
мер при прицеливании по корабельной РЛС, когда по данным целеуказания от
других средств известна плотность вероятности вектора состояния цели, в ка-
честве начальной оценки вектора состояния Д
0ц
и начальной матрицы апосте-
риорной дисперсии D
0
можно задавать соответственно математическое ожи-
дание и корреляционную матрицу этой плотности вероятности.
При отсутствии априорных данных о текущих параметрах движения цели
начальные значения оценок координат х
0ц
, г
0ц
можно формировать, исходя из
геометрии прямоугольного треугольника и на основании измерения азимута
а
0
и угла места β
0
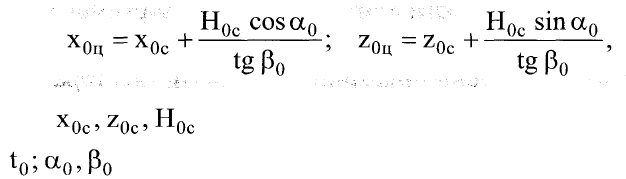
цели в соответствии с выражениями:
где - координаты АК РЛДН в НЗСК в начальный момент времени
— углы визирования цели по азимуту и углу места.
Начальные значения скорости и ускорения движения цели выбирают, ис-
ходя из диапазона возможных скоростей и ускорений для заданных типов дви-
жущихся целей.
Результаты численных расчетов синтезированного квазиоптимального по-
следовательного алгоритма оценивания текущих параметров движения цели по
критерию минимума среднего квадрата ошибки показали [2,15], что предла-
гаемые алгоритмы работоспособны при наличии флуктуационных погрешно-
стей в измерениях азимута и угла места. Это обстоятельство свидетельствует о
возможности использования их в БРЛС, в частности при оценке координат ра-
диоизлучающих объектов наземного (надводного) базирования.
4.4.2. Метод и реализующий его алгоритм самотриангуляции
в БРЛС для сопровождения целей-ПАП
В реальных условиях функционирования при полном радиоэлектронном
подавлении активных радиолокационных каналов информационных средств и
при отсутствии дополнительных разнесенных источников пеленговой информа-
ции в АКРЛДН определение местоположения излучающих целей (ИЦ) стано-
вится невозможным. В таких ситуациях БРЛС работает автономно и использует
собственную информацию пассивных радиолокационных каналов для органи-
зации сопровождения данных объектов. Для неподвижных информационных
средств наземного базирования по собственной пеленговой информации име-