Верба В.С. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции развития. 2008
Подождите немного. Документ загружается.


вероятность обнаружения каждой цели на каждой частоте повторения
равна единице.
Если обнаруживается m целей на η частотах повторения и то отно-
шение числа ложных измерений к числу истинных оценивается по формуле
(3.7)
где Q - среднее число элементов разрешения на периоде повторения; т
и
- про-
тяженность элемента разрешения в масштабе измерения периодов повторения.
Отсюда видно, что при фиксированном числе частот повторения и фикси-
рованной скважности необходимо увеличивать число элементов разрешения.
Увеличение числа η целесообразно в том случае, если это не приводит к сни-
жению вероятности обнаружения на азимутальной пачке.
Для снижения вероятности ошибок в условиях реального радиолокацион-
ного наблюдения (неединичная вероятность обнаружения, неравномерное рас-
пределение целей при полете в боевых порядках и т. д.) необходимо проводить
идентификацию отметок, полученных на смежных кадрах.
Идентификация отметок на пачке кадров основана на построении для ка-
ждой их комбинации функционала качества идентификации. Этот функционал
представляет собой некоторую статистику, распределения которой существен-
но различаются для отметок, порожденных одной и той же целью, и разными
целями. Обычно это сводится к накоплению «невязок» между априорным
(ожидаемым) значением параметра и полученным в данной комбинации отме-
ток. Отбор комбинаций для формирования выходной отметки осуществляется
на основе анализа полученного функционала и может проводиться по различ-
ным критериям. Так, возможны следующие варианты.
1. Выбор единственной комбинации с наилучшим значением функционала
(в частности, с наибольшей амплитудой).
2. Отбор комбинаций со значением функционала не ниже порогового.
3. Отбор лучших комбинаций, число которых равно минимальному числу
обнаруженных отметок из всех кадров. Наиболее просто эта задача решается
для случая двух кадров. Она формализуется как задача о назначениях в дву-
дольном графе и может быть решена, например, «венгерским» методом [18].
При отборе комбинаций необходимо учитывать возможность слияния от-
меток разных целей по неоднозначной дальности. Если такую гипотезу отвер-
гать (считать это событие маловероятным), то при отборе необходимо учиты-
вать, что каждая отметка может войти только в одну комбинацию.
Критерий отбора может изменяться в различных тактических ситуациях.
Критерий № 1 может быть пригоден при слежении за единственной приори-
тетной целью из состава группы, численность которой не определяется. Крите-
рий № 2 обеспечивает гарантированную достоверность информации о выдан-
ных отметках, но часть первичных обнаруженных отметок может быть утеряна.
Он может применяться на этапе раннего радиолокационного обнаружения для
повышения качества захвата и обнаружения трасс без определения численного
состава групп. По критерию № 3 выдается максимальное число отметок, воз-
можно, с повышенным уровнем ложных дальностей. Он целесообразен при на-
личии сопровождаемой трассы для определения численного состава.
В простейшем функционале качества используется закономерность изме-
нения амплитуды отметки при сканировании по азимуту - форма азимутальной
диаграммы. Для его формирования сначала вычисляются азимут предполагае-
мой комбинации отметок по формуле дискриминатора типа (3.2) и оценка ам-
плитуды в центре пачки:
(3.8)
где a
in
, b
i;n
- весовые коэффициенты; Ai - амплитуда отметки на i-м кадре.
Оцениваются амплитуды сигналов на каждом кадре А
{
, которые должны
иметь отметки с азимутом φ и амплитудой А :
где - азимутальная диаграмма направленности; Δφ - угловое расстояние
между кадрами.
Функционалом качества F служит нормированная сумма отклонений из-
меренных амплитуд от теоретических
Также возможна селекция целей по амплитуде. Для этого отметки на каж-
дом кадре ранжируются по амплитуде, и идентифицируются отметки с одина-
ковыми рангами.
После идентификации отметок и вычисления однозначной дальности про-
водится устранение неоднозначности по частоте. При работе с высокой часто-
той повторения априорный диапазон скоростей целей всего в два-три раза пре-
вышает интервал неоднозначного измерения на одной частоте повторения. По-
этому для раскрытия неоднозначности измерений достаточно выполнить
прямой перебор двух-трех возможных гипотез. Для повышения точности изме-
рения скорости целесообразно усреднение замеров на отдельных кадрах обра-
ботки. При компенсации собственной скорости носителя измеренная величина
соответствует радиальной скорости цели относительно земли. Если необходи-

мо знание скорости сближения (удаления) цели с РЛС, то из измерения вычи-
тается радиальная составляющая скорости носителя.
Измерение азимута может проводиться различными способами. Простей-
шим из них является определение центра пачки по формуле
(3.9)
где (р
нач
, φ
ΚΟΗ
- азимуты центров кадров начала и конца пачки.
Более точные оценки получаются при весовой обработке амплитуд по
формуле (3.8). Как и в любом дискриминаторе, выбор весовых коэффициентов
позволяет реализовать оценку положения максимума пачки, медианы, центра
тяжести и более высоких моментов распределения амплитуд.
Измерение азимута проводится по информации датчика угла поворота ДН
антенны, который жестко связан с полотном антенны и обычно юстируется по
строительной оси самолета. Ось вращения антенны в общем случае отклонена
от местной вертикали как по конструктивным соображениям, так и из-за нали-
чия крена и тангажа самолета-носителя. Перед выдачей в систему вторичной
обработки координат цели азимут пересчитывается в систему координат, в ко-
торой проводится сопровождение. Это могут быть следующие системы:
прямоугольная система координат, связанная с местным горизонтом и
ориентированная по местному меридиану с центром в точке нахождения РЛС
(местная система координат);
топоцентрическая прямоугольная система координат с центром в заданной
точке на поверхности земли;
геодезическая система координат;
геоцентрическая система координат.
При пересчете в местную систему координат используются данные о те-
кущем курсе, крене и тангаже самолета, а также учитывается ориентация ан-
тенной площадки относительно строительной оси. Для повышения точности
целесообразно учитывать статические и переменные деформации несущих пи-
лонов под действием аэродинамических нагрузок, а также проводить хотя бы
грубую оценку угла места цели.
В режимах работы с низкой частотой повторения дальность измеряется
однозначно. Формирование первичных измерений основано на возможности
оценки времени задержки отраженных сигналов в приемном устройстве. Изме-
рения формируются по информации о номере строба, в котором обнаружена
цель. Группирование отметок в смежных стробах позволяет избежать размно-
жения целей и повышает точность измерения дальности.
Группирование по дальности в пределах азимутальной пачки и измерение
этих координат можно проводить различными способами. В одном случае ази-
мутальная пачка формируется для каждого элемента дальности. Вследствие то-
го, что пачка состоит из малого числа отсчетов, критерии начала и конца обыч-
но очень жесткие: начало - первое обнаружение, конец - первый пропуск.
Алгоритм измерения азимута зависит от алгоритма обнаружения пачки.
Если обнаружение проводится в скользящем окне симметричной формы, то ал-
горитмы дискриминаторов (3.2), (3.8) дают несмещенные оценки практически с
одинаковыми точностями. Несколько худшую, но также несмещенную оценку
дает формула (3.9). Это имеет место при нерекурсивной обработке короткой
пачки в РЛС S-диапазона и всегда при кадровой обработке длительного сигна-
ла в РЛС Р-диапазона. Если для упрощения обработки применяется рекурсив-
ное накопление энергии пачки, то амплитуды обнаруженных отметок уже не
имеют симметричную форму, так как являются результатом свертки симмет-
ричной диаграммы направленности с асимметричной импульсной характери-
стикой рекурсивного фильтра. В этом случае смещение оценки по формуле
(3.9) зависит от длительности обнаруженной пачки (от мощности сигнала) и
для компенсации систематической ошибки требуется введение поправок, зави-
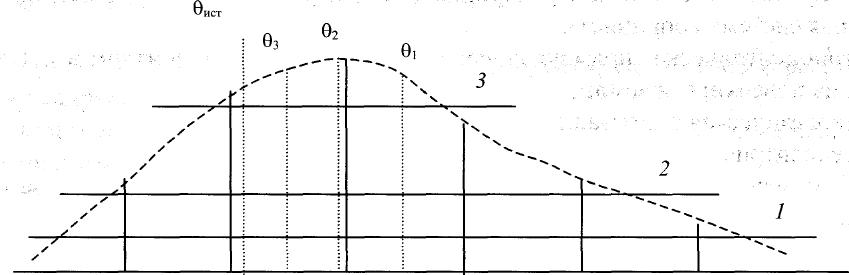
сящих от числа обнаруженных отсчетов. Эта ситуация проиллюстрирована на
рис. 3.4, где случай 1 соответствует наибольшей мощности сигнала, случай 2 -
средней мощности, случай 3 - минимальной мощности сигнала. Соответствен-
но проиндексированы значения оценок. Интересно отметить, что величина
ошибки увеличивается при возрастании мощности сигнала.
t,c
Рис. 3.4
Систематическая ошибка алгоритма поиска максимума практически не
зависит от длительности пачки, и компенсация ошибки сводится к постоянной
поправке. Наибольшей чувствительностью обладает алгоритм определения
центра тяжести.
Оценки азимутов пачек, полученные в смежных элементах дальности, ус-
редняются с весами, пропорциональными мощности сигналов. При этом также
уточняется дальность путем весовой обработки амплитуд.
В другом варианте объединение отметок по дальности с уточнением изме-
рений путем весовой обработки проводится при каждом новом поступлении
данных. Таким образом, азимутальная пачка формируется для средневзвешенной
дальности. После окончания пачки ее положение вычисляется по амплитудам
объединенных отметок аналогично тому, как это делается в первом варианте.
В режимах работы по морским и по воздушным загоризонтным целям на
ошибку пересчета азимута в горизонтальную плоскость не влияет отсутствие
измерения угла места. При работе по морским целям их угол места известен,
угол места загоризонтных целей находится в очень узком диапазоне, и в фор-
муле пересчета ему может быть приписано некоторое постоянное значение.
В режимах низкой частоты повторения радиальная скорость измеряется
неоднозначно либо вообще не измеряется.
3.2. Алгоритмы сопровождения целей
в бортовой радиолокационной системе
авиационного комплекса радиолокационного
дозора и наведения
3.2.1. Общие положения
Для БРЛС АК РЛДН характерно применение режимов автоматического со-
провождения многих целей в процессе обзора воздушного пространства (автома-
тическое сопровождение целей в режиме обзора (АСЦРО)). Эффективность все-
го комплекса существенно повышается, если обнаруживаются траектории це-
лей и их взаимное положение по отношению к опорной системе координат,
общей для всех взаимодействующих объектов. Автоматическое сопровождение
целей в режиме обзора - это фактически построение траекторий целей, вклю-
чая и прогнозирование положения точек траектории на некоторое время впе-
ред. Таким образом, под АСЦРО понимается процесс непрерывного форми-
рования оценок относительных и абсолютных фазовых координат целей
при достаточно редком (дискретном) поступлении от них отраженных сигна-
лов. Решение этой задачи осуществляется в несколько этапов, включающих
формирование первичных измерений, завязку траекторий, ее обнаружение,
экстраполяцию фазовых координат (траекторий) в промежутках между поступ-
лениями отраженных сигналов, идентификацию полученных измерений на их
принадлежность к той или иной из сопровождаемых траекторий, коррекцию
(фильтрацию) определенной траектории по результатам идентифицированных
измерений, ранжирование целей по степени их важности (опасности) и сброс
сопровождаемых траекторий.
Важнейшей задачей системы траекторного сопровождения является распо-
знавание класса и типа целей, а также траекторий ложных целей (наземные дви-
жущиеся цели, помеховые отражения от подстилающей поверхности и т.п.).
Рассматриваются также алгоритмы «сопровождения до обнаружения»,
т. е. обнаружение траекторий цели с учетом априорных данных о типе цели и
ее траектории движения.
Исходя из этих задач резко возрастают требования к вычислительным
возможностям процессора сопровождения (до двух тысяч и более траекторий
целей одновременно).
Формирование первичных измерений содержит все этапы первичной обра-
ботки радиосигналов: от их обнаружения до получения отсчетов дальности,
скорости сближения и бортовых пеленгов в горизонтальной и вертикальной
плоскостях (см. выше).
Под завязкой траекторий понимается процесс взятия на сопровождение
целей, появляющихся в зоне обзора БРЛС. Экстраполяция представляет собой
процесс прогнозирования всех фазовых координат относительного движения
целей, которые используются для целеуказания, наведения и выдачи информа-
ции на пункт управления (ПУ).
Цель идентификации результатов поступающих измерений - определить
ту из экстраполируемых траекторий, которой по тем или иным признакам наи-
более достоверно соответствуют полученные наблюдения. Правила установле-
ния такого соответствия могут быть различными и будут изложены далее.
В зависимости от требований к точности сопровождения и вычислитель-
ных возможностей бортовой цифровой вычислительной системы (БЦВС) кор-
рекция (фильтрация) экстраполированных траекторий по идентифицирован-
ным результатам измерений может выполняться по различным законам. Наи-
более часто для этого используются алгоритмы α-, β- и оптимальная линейная
аналого-дискретная фильтрация [9].
Поскольку число целей может превышать число наводимых истребителей,
то для их эффективного применения желательно знать степень опасности
(важности) сопровождаемых объектов. В связи с этим необходимо выделять
наиболее опасные (важные) цели, которые целесообразно уничтожать в первую
очередь. Одним из наиболее часто используемых признаков (критериев) опас-
ности является минимум отношения дальности к скорости. Смысл этого крите-
рия состоит в вычислении времени t
B
, оставшегося до встречи с сопровождае-
мой целью по результатам экстраполяции (измерения) дальности и скорости.
Та цель, для которой вычисленное значение 1;
В
=|Д/А| окажется наименьшим, и
считается наиболее опасной.
Сброс цели с сопровождения выполняется в рамках анализа результатов
измерений в процессе завязки траекторий и идентификации наблюдений. Если
в результате анализа выясняется, что полученные результаты не идентифици-
руются ни с одной из экстраполируемых траекторий и при этом не выполняют-
ся условия завязки новой траектории, то цель исключается из процесса сопро-
вождения.

Следует отметить, что каждый из этапов может выполняться различными
способами [10, 13, 14, 19], обеспечивающими различную эффективность режи-
ма в целом. Наиболее распространены в БРЛС АК РЛДН алгоритмы с экстра-
поляцией по гипотезе движения с постоянной скоростью, идентификацией в
стробах отождествления и а-, β-фильтрацией [9, 10, 19].
3.2.2. Алгоритмы АСЦРО с идентификацией измерений
в пробах отождествления и ay β-фильтрацией
Одним из самых простых алгоритмов, применяемых в АК РЛДН, является
АСЦРО, в котором траектории экстраполируются по гипотезе изменения фазо-
вых координат с постоянной скоростью, а результаты измерений идентифици-
руются в стробах отождествления с последующей а-, β-фильтрацией.
Автоматическое сопровождение целей в режиме обзора обеспечивается в
процессе совместного функционирования импульсно-доплеровской БРЛС, ав-
тономных датчиков и БЦВС. Бортовая радиолокационная станция АКРЛДН
формирует оценки дальности Д
и
до цели, скорости сближения с ней
и бортовые пеленги в горизонтальной и вертикальной плоскостях:
(вектор измерений При этом контролируемая зона про-
странства просматривается лучом антенны БРЛС путем последовательного
кругового сканирования антенны. Автономные датчики измеряют углы атаки
а
и
, крена у
и
, рыскания ψ
Η
, тангажа 0
И
и составляющие вектора скорости носи-
теля по осям подвижной прямоугольной системы координат. Бортовая цифро-
вая вычислительная система осуществляет завязку траекторий и их экстрапо-
ляцию, формирует стробы отождествления и идентифицирует в них результаты
измерений, а также выполняет а-, β-фильтрацию и ранжирование целей по сте-
пени их опасности.
В общем случае первый шаг сопровождения начинается с формирования
текущей позиции (точки) траектории или, как иногда говорят, с получения
первичных данных (измерений) о состоянии цели. Среди потока данных от це-
лей, поступающих на вход системы сопровождения, возможно появление целе-
подобных ложных отметок, источниками которых являются:
шумовые ложные отметки, распределенные равномерно в зоне обзора;
отметки нераспознанных в первичной обработке «антиподов»-целей, обу-
словленные переотражением сигналов от земной поверхности и коррелирован-
ные с отметками истинных целей;
неподавленные остатки альтиметровой помехи;
отметки, обусловленные ложными комбинациями неоднозначных отсче-
тов дальностей целей, находящихся в неразрешаемой по азимуту скорости и
высоте области.
Следующий шаг сопровождения состоит в оценке соответствия (иден-
тификации) данных о цели с уже ранее определенными траекториями целей.
Если соответствие не установлено, то обнаруженная цель считается новой и
формируется начало новой траектории. Под идентификацией или отождествле-
нием результатов измерений понимается процесс принятия решения об их со-
ответствии той или иной экстраполируемой траектории. Этот процесс состоит
из двух этапов. На первом этапе результаты измерений сопоставляются со
всеми экстраполируемыми траекториями, на втором этапе - выбирается одна
из траекторий, по тем или иным критериям наиболее достоверно соответст-
вующая результатам измерений. Необходимо отметить, что первый этап может
выполняться и по другой стратегии. Каждая из экстраполируемых траекторий
поочередно ставится в соответствие всем принятым за время обзора результа-
там измерений [19]. Выбранная по результатам идентификации траектория
корректируется (фильтруется).
Способы сопоставления и правило принятия решений в процессе иденти-
фикации могут быть различными. Один из них основан на сопоставлении тра-
екторий и результатов измерений в так называемых стробах отождествления.
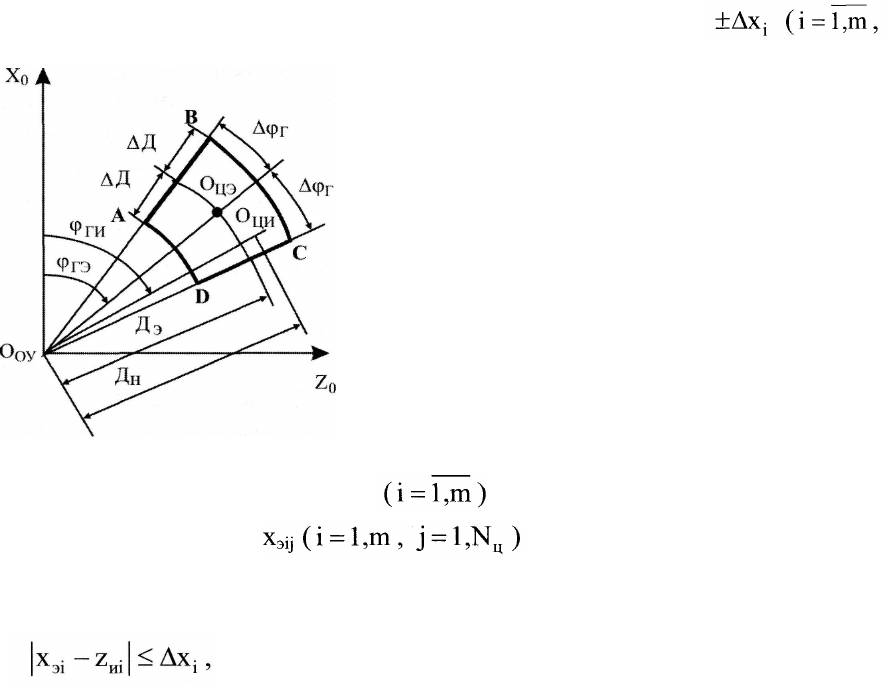
Под стробом отождествления, именуемым также корреляционным, по-
нимается область многомерного пространства с размерами где
m - число измеряемых фазовых координат,)
вокруг точки с экстраполированными на ка-
ждом цикле обзора координатами. Пример
пространственного строба ABCD для двух-
мерного пространства (m = 2) показан на
рис. 3.5, где точки О
оу
, О
цэ
и О
ци
соответст-
вуют носителю БРЛС, результатам экстрапо-
ляции и измерений положения цели; АД и
Δφ
Γ
- размеры строба по дальности и борто-
вому пеленгу в горизонтальной плоскости.
Смысл сопоставления в стробах отожде-
ствления состоит в том, что все полученные
от одной цели измерения Zi
,поочередно сравниваются с анало-
Рис. 3.5
гичными координатами всех N
u
экстраполируемых траек-
торий в пределах допусков AXJ. Если хотя бы для одной фазовой координаты j-
й цели не выполняется условие
(3.10)
то данная траектория исключается из дальнейшей процедуры принятия решения.
Порядок перебора всех N
u
экстраполируемых целей может быть как безприори-
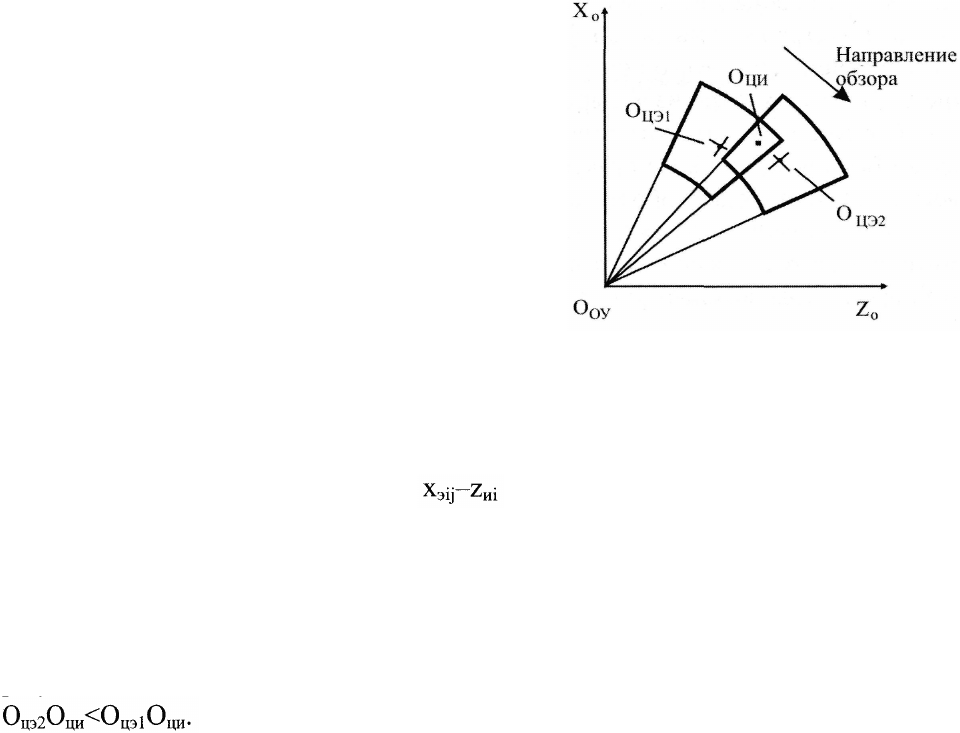
Рис. 3.6
тетным, так и приоритетным. В последнем случае очередность сопоставления
определяется приоритетом (важностью) одной цели перед другими.
Процедура принятия решения о соответствии измерений z
Hi
той или иной
из экстраполированных целей, удовлетворяющих условию (3.10), также может
быть различной. Наиболее простым является
правило принятия решения по первому вы-
полнению условия (3.10). Такой алгоритм
принятия решения пригоден лишь для доста-
точно разнесенных в пространстве целей. Ес-
ли же сопровождаемые цели расположены
достаточно близко, то принятое решение мо-
жет оказаться недостоверным, так как усло-
вию (3.10) могут удовлетворять результаты
экстраполяциии другой цели. Пример такой
ситуации показан на рис. 3.6, где точками О
ЦЭ
1
и 0
Ц
э2 показано расположение целей 1 и 2 по
результатам экстраполяции их траекторий,
точка О
ци
соответствует положению цели по результатам измерений.
Более достоверна процедура принятия решения после дополнительной
обработки результатов сравнения для всех траекторий, удовлетворяю-
щих условию (3.10). В качестве меры окончательного соответствия измере-
ний z
Hi
той или иной j-й траектории с координатами x
3ij
может использоваться
расстояние между точками О
ц
^ и точкой О
ци
, соответствующей полученным
измерениям. Та траектория, для которой это расстояние будет наименьшим, и
будет считаться идентифицированной. Для случая, приведенного на рис. 3.6,
результатам измерений соответствует вторая траектория О
ЦЭ
2, поскольку
Размеры стробов отождествления должны одновременно удовлетворять
двум условиям. С одной стороны, они должны обеспечить попадание результа-
тов измерений от соответствующей цели внутрь строба при любых реальных
законах движения сопровождаемого объекта. С другой стороны, число попада-
ний мешающих сигналов внутрь строба должно быть минимальным. Суть од-
ной из самых простых методик выбора размеров стробов состоит в следующем.
Если в результате идентификации выяснится, что полученные измерения
не соответствуют ни одной из экстраполируемых траекторий, то принимается
предварительное решение о наличии новой цели (завязка траектории). По-
скольку процесс обнаружения случаен, то принятое предварительное решение
нуждается в дополнительном подтверждении, суть которого состоит в том, что
по результатам первого измерения прогнозируется положение цели для сле-
дующего цикла. Относительно прогнозируемого положения формируется строб
отождествления, называемый также корреляционным, в котором и ищется от-
раженный сигнал на следующем цикле измерений. Затем процедура повторяет-
ся для следующего цикла измерений. Если в m последовательных циклах цель
обнаруживается k < m раз, то принимается окончательное решение о наличии в
зоне обзора БРЛС новой цели. После этого результаты последних измерений
заносятся в специальный файл БЦВС в качестве начальных условий для после-
дующей экстраполяции новой фазовой траектории. Для принятия окончатель-
ного решения чаще всего используется логика обнаружения два из двух, два из
трех, три из трех и три из четырех [19].
Следует отметить, что процедура реализации процесса завязки траектории
может быть различной. На практике обычно применяется процедура так называе-
мого скользящего окна либо процедура последовательных испытаний Вальда [19].
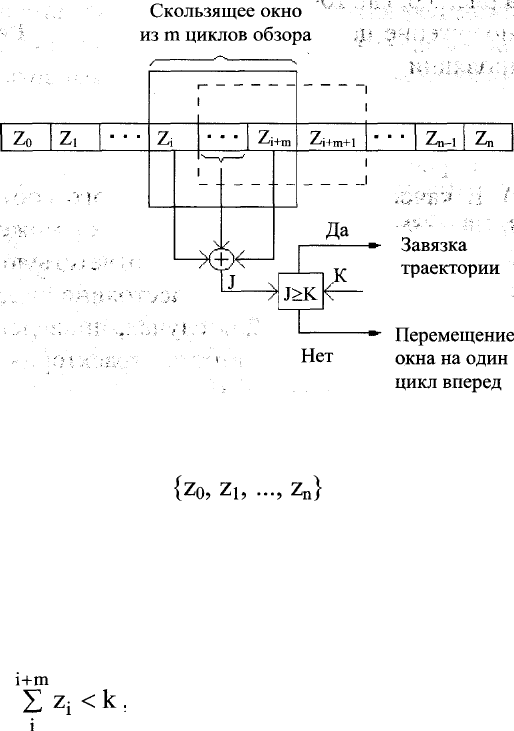
При процедуре скользящего окна результаты предварительных решений
обрабатываются в нескольких последовательных циклах обзора БРЛС. Смысл
этой процедуры поясняет рис. 3.7.
Рис. 3.7
Пусть последовательность представляет результаты предвари-
тельного анализа отраженных сигналов во всех циклах измерений. При попада-
нии результатов измерений i-ro цикла в строб отождествления считается, что
Zi=l, в противном случае Zj=0. Если в окне из m последовательных циклов обзора
число обнаружений цели в стробах отождествления достигнет определенного
значения к, то принимается окончательное решение о завязке новой траектории.
В ситуации, когда , окно из m обзоров смещается на один цикл в сторо-
ну увеличения. На рис. 3.7 новое положение окна показано штриховой линией.
Качество функционирования алгоритмов принятия решения о наличии но-
вых целей характеризуется достоверностью и скоростью завязки траекторий.
Количественно достоверность завязки оценивается вероятностью принятия