Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.


Lagrangian Mechanics
111
density of the bar; this force derives from the simple potential
′
−+
2
2
(/2)( sin)dkxμρ θ . Noting that
===
∫∫∫
2
d,d0, d
BBB
AAA
xM xx xxIμμμ,
we get
()
()
′′
=− + =− +
∫
2
22
22
sin d sin
22
B
A
kk
UxxMIρθμ ρ θ
.
(18.3.64')
One obtains, easily,
′
==− =−
12 23
0, , sin 2
2
k
QQkMQ Iρθ
.
(18.3.64'')
We are thus led to Lagrange’s equations
′′′
==− =−
12 2
0, , 2 sin 2kkρρ ρθ θ
.
(18.3.65)
The mass centre
C describes a sinusoid along the
′′
1
Ox -axis, its projection on this axis
having a uniform motion; the bar oscillates about the
′′
1
Ox -axis with a frequency equal
(in case of small oscillations with
≅sin θθ, hence ≅sin 2 2θθ) to the frequency of
the oscillations of the projection of the centre
C on the
′′
2
Ox -axis.
18.3.2.8 Double Pendulum
We return to the double pendulum, considered in Sect. 17.1.1.2. This mechanical
system has two degrees of freedom and we can choose as generalized co-ordinates the
angles made by
11
OC
and
22
OC
, respectively, with the descendent vertical
(
==
1122
,qqθθ
); we have denoted by
1
O
the suspension pole of the solid
1
S with the
mass centre
1
C
and by
2
O
the hinge between this solid and the solid
2
S , with the mass
centre
2
C
(see Fig. 17.1, a too). The kinetic energy of the mechanical system
≡
12
{, }SSS is given by
{
}
⎡⎤⎡⎤
′′′
=+ + +
⎣⎦⎣⎦
22
(2) (2)
22
11 2 22
12
11 1
22 2
TI M I
θρρ θ
,
(18.3.66)
where
1
I
is the moment of inertia of the rigid solid
1
S with respect to the
′′
1
Ox -axis,
while
2
I
is the moment of inertia of the rigid solid
2
S , of mass
2
M
, with respect to
the axis which passes through the centre
2
C
of co-ordinates
′′
(2) (2)
12
,ρρ and is parallel
to the axis
′′
13
Ox . We notice that
′′
=+ =+
(2) (2)
12 2 12 2
12
cos cos , sin sinll llρθθρθθ;
we obtain thus
MECHANICAL SYSTEMS, CLASSICAL MODELS
112
()()
′
=+ ++ + −
22 22
121 2222 2212 21
11
cos( )
22
TIMl IMl Mll
θθθθθθ
.
(18.3.66')
As well, the potential of the weight forces is
()
=+ +
11 1 2 1 2 2
cos cos cosUMgl Mgl lθθθ.
(18.3.67)
Lagrange’s equations read
()
() ()
()
()
() ()
++ −−−
⎡
⎤
⎣
⎦
=− +
++ −+−
⎡
⎤
⎣
⎦
=−
22
12122 212 212
11 2 1
22
222222 211 211
22 2
cos sin
sin ,
cos sin
sin .
IMl Mll
Ml Ml g
IMl Mll
Mlg
θθθθθθθ
θ
θθθθθθθ
θ
(18.3.68)
We find thus again (17.1.4), which have been studied and integrated by Bradistilov and
by Anca Zlătescu. The small oscillations of the double pendulum have been considered
in Sect. 17.1.1.2.
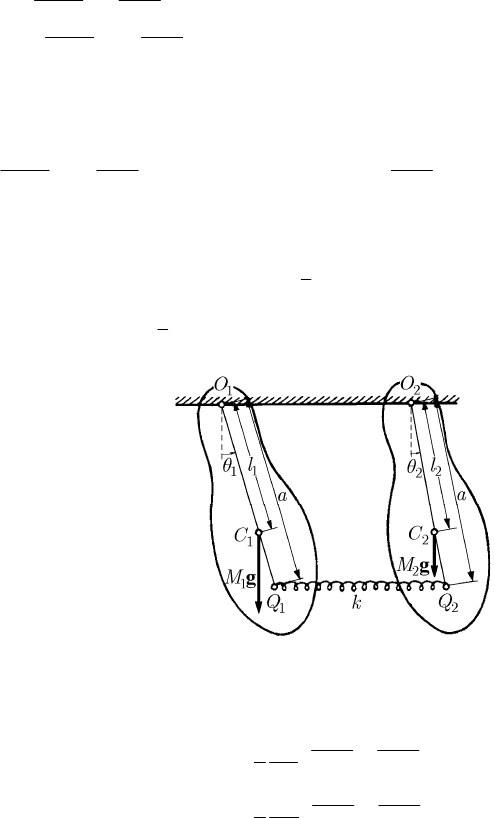
18.3.2.9 Sympathetic Pendulums
The sympathetic pendulum has been considered directly with the aid of Newton’s
equations in Sect. 17.1.1.3. We take again the problem in case of the two physical
pendulums of masses
1
M and
2
M , the gravity forces being applied at the mass centres
1
C and
2
C , respectively; we denote ==
11 1 22 2
,OC l OC l , where
1
O and
2
O are the
poles through which pass the axes of suspension. The two pendulums are connected by
an elastic spring
12
QQ , so that the point
1
Q is on the straight line
11
OC , while the point
2
Q is on the straight line
22
OC , with ==
11 22
OQ OQ a (Fig. 18.13). The spring
12
QQ is characterized by the elastic constant k , so that the magnitude of the force
which arises in the spring is given by
−
12 12
||kOO QQ
, where = constk (unlike the
case considered in Sect. 17.1.1.3, where the elastic constant depends on the mass of the
physical pendulum upon which acts the spring, the position of the points
1
Q and
2
Q
playing no one rôle).
The position of this mechanical system is specified by the generalized co-ordinates
and==
11 22
qqθθ, these ones being the angles made by
11
OC and
22
OC ,
respectively, with the vertical line. The kinetic energy is given by
()
=+
22
11 22
1
2
TIIθθ
,
(18.3.69)
where
1
I and
2
I are the moments of inertia of each pendulum with respect to the
corresponding axis of suspension. The potential
U
is expressed in the form
()
=+−−
2
11 1 22 2 1 2 1 2
(cos cos)
2
k
UgMl Ml OOQQθθ .
Lagrangian Mechanics
113
But
()
[
]
() ()
[]
=+ − + −
=+ −+− −
2
22
2
12 12 2 1 2 1
2
2
12 12 2 1 2 1
sin sin (cos cos )
2sinsin21cos .
QQ OO a a
OO aOO a
θθ θθ
θθ θθ
In the case of small oscillations, we have
≅
11
sin θθ
,
≅
22
sin θθ
, ≅−
2
11
cos 1 /2θθ,
≅−
2
22
cos 1 /2θθ, so that
()() ()
[
]
+−+−=+−
2
2
2
2
12 12 2 1 2 1 12 2 1
2QQ aOO a OO aθθ θθ θθ .
Hence, in case of small oscillations, it results
()
()
()
=+− +
−++
22
11 22 1 1 1
22 2
22 2 12
1
2
1
.
2
UgMl Ml Mgl ka
Mgl ka ka
θ
θθθ
(18.3.69')
Fig. 18.13 Sympathetic pendulums
Lagrange’s equations read (
=+TUL )
()
()
∂
++−=
∂
∂
++−=
∂
2
11 1 1 1 1 2 1 2
1
2
22 2 2 2 1 2 1 2
2
sin 0,
2
sin 0 .
2
k
I M gl OO QQ
k
IMgl OOQQ
θθ
θ
θθ
θ
(18.3.70)
In case of small oscillations, we get
()
()
++−=
++−=
2
11 1 11 1 2
2
22 2 22 1 2
0,
0.
IMglka
I M gl ka
θθθθ
θθθθ
(18.3.70')
In the particular case of two identical physical pendulums (
==
12
MMM
,
==
12
lll, ==
12
III), we may write
MECHANICAL SYSTEMS, CLASSICAL MODELS
114
()() ()()
∂∂
++ += −+ −=
∂∂
22
22
0
12 12 12 12
22
0, 0
tt
θθ ωθθ θθ ωθθ
,
where we have introduced the pulsations (
′
l
is the length of the synchronous
mechanical pendulum)
()
== = + =+
′
2
22 22
00
12
,2
2
Mgl g ka
Mgl ka
Il I
ωω ω.
(18.3.71)
Hence, we obtain
() ()
[]
() ()
=+ +−
⎡⎤
++ +−
⎢⎥
⎣⎦
00 00
0
112 12
00 00
0
12 12
0
1
() cos cos
2
11 1
sin sin .
2
ttt
tt
θθθωθθω
θθ ω θθ ω
ωω
(18.3.72)
() ()
[]
() ()
=+ −−
⎡⎤
−+ −−
⎢⎥
⎣⎦
00 00
0
212 12
00 00
0
12 12
0
1
() cos cos
2
11 1
sin sin ,
2
ttt
tt
θθθωθθω
θθ ω θθ ω
ωω
where
=
0
(0)
kk
θθ
, ==
0
(0), 1,2
kk
kθθ , corresponding to the initial moment = 0t .
If ====
0000
0
1212
,0, 0θθθ θθ
, then we get
()
()
()
()
()
()
−+
=+=
−+
=−=
000
00
1
000
00
2
( ) cos cos cos cos ,
222
() cos cos sin sin ,
222
tt
ttt
tt
ttt
θωωωω
θωωθ
θωωωω
θωωθ
(18.3.72')
These results correspond to those in Sect. 17.1.1.3, excepting to the different
definition of the elastic constant
k
.
Chapter 19
Hamiltonian Mechanics
The motion of the representative point
∈
s
P Λ is governed by a system of s differential
equations of second order (Lagrange’s equations) in Lagrangian mechanics. In 1834,
W. R. Hamilton had the idea to use a representative space with
2s dimensions, the motion
of a representative point in this space being specified by a system of
2s linear differential
equations (Hamilton’s equations); The new formulation (in the frame of Hamiltonian
mechanics) is equivalent to the Lagrangian formulation for discrete mechanical systems
with holonomic, ideal constraints, being put a restrictive condition: these systems must be
natural (as a matter of fact, the considered systems must admit a Lagrangian). These
equations have remarkable analytical properties, leading to a rigorous and elegant
mathematical formulation of the quantic model of mechanics. Especially, the Hamilton–
Jacobi partial differential equation allows to pass from the matric quantum mechanics to the
undulatory mechanics.
In this order of ideas, after a study of Hamilton’s equations, we will consider in detail the
Hamilton–Jacobi method (Arnold, V.I., 1976; Dobronravov, V.V., 1976; Goldstein, H.,
1956; Lurie, A.I., 2002; Routh, E.J., 1892, 1898; Ter Haar, D., 1964).
19.1 Hamilton’s Equations
After establishing some results with a general character, including Hamilton’s equations,
we make a study of several expressions which play a special rôle: Lagrange’s brackets and
Poisson’s brackets; these results will be illustrated by some applications to particular
mechanical systems.
19.1.1 General Results
To pass from the space of configurations to the phase space, one introduces the canonical
co-ordinates and one obtains Hamilton’s canonical equations; after putting in evidence
some properties of the latter ones, one considers Routh’s equations, as well as other
equivalent equations.
19.1.1.1 Canonical Co-ordinates. Phase Space. Associate Expressions
To study a natural discrete mechanical system
S of n particles, subjected to
holonomic ideal constraints, we consider Lagrange’s equations (18.2.38) (where we have
introduced the kinetic potential
=+TUL ), which describe the motion of the
representative point
12
( , ,..., )
s
Pq q q in the space of considerations
s
Λ
. To pass from this
115
P.P. Teodorescu, Mechanical Systems, Classical Models,
© Springer Science+Business Media B.V. 2009

MECHANICAL SYSTEMS, CLASSICAL MODELS
116
system of equations of second order to a system of equations of first order, one has an
infinity of possibilities to proceed (e.g., as in Sect. 18.2.3.8).
Thus, in Sect. 18.2.3.6 there have been introduced the generalized momenta by means of
relations (18.2.80). Taking into account (18.2.81) and (18.2.15), (18.2.15'), and (18.2.15''),
we can write
=++=, 1,2,...,
jjj
jk k
pgqgUj s .
(19.1.1)
Introducing the normalized algebraic complement
jk
g of the element
jk
g of the deter-
minant
=≠det[ ] 0
jk
gg
, which verify the relations (18.2.44), we obtain, easily,
=− + =( ), 1,2,...,
j
kjk
j
kkk
qgpggUj s .
(19.1.1')
Let
′
2s
Λ be the space of the points
12 12
( , ,..., , , ,..., )
ss
Pq q q q q q ; let us introduce also the
representative space
2s
Γ of the representative points
12 1 2
( , ,..., , , ,..., )
ss
Pq q q p p p . We
notice that the formulae (19.1.1), (19.1.1') establish a one-to-one correspondence between
the two spaces. A state of the considered discrete system
S is represented, as we have
shown in the preceding chapter, by a representative point in the space
s
Λ , hence by a point
in the space
′
2s
Λ , and this one is represented, in a one-to-one mode, by a representative
point in the space
2s
Γ . The representative space
2s
Γ is called the phase space (or the
Gibbs’s space).
The co-ordinates
12 1 2
, ,..., , , ,...,
ss
qq qpp p of the corresponding representative point
P (the set of generalized co-ordinates and the set of generalized momenta) are called
canonical co-ordinates (Hamiltonian co-ordinates); the generalized momenta
j
p are co-
ordinates conjugate to the generalized co-ordinates
j
q . We replace thus the study of the
motion of the mechanical system
S in
3
E by the study of the motion of the representative
point
P in the space
2s
Γ . Having to do only with holonomic constraints, which are
eliminated by passing to generalized co-ordinates, the representative point
∈
2s
P Γ is a
free point.
To study the motion of the point
P , we will express the quantities of energetical nature
used in the space
s
Λ by means of the canonical co-ordinates in the space
2s
Γ ; by passing
to canonical co-ordinates, a function
(,;)
jj
Fq q t
becomes a new function (, ;)
jj
Fq p t
,
called the associate expression of the function
F , so that
=(,;) (, ;)
jj j j
Fq q t Fq p t
. The
quantities (18.2.15'), (18.2.15'') read
=−++++
=− +
11 1
() ()(),
22 2
(),
jk jk jk
jjjj jj
jk k k k k k
jk jk
jj j j
kkk
gqq gpp gg Up gg Ug U
gq g gp g g g U
where we took into account the relations (18.2.44). The kinetic energy will take the
form
Hamiltonian Mechanics
117
=++
0
21
TT TT
,
(19.1.2)
where we have put in evidence a quadratic form, a linear form and a constant with
respect to the generalized momenta, given by (we notice that
≠=,0,1,2
kk
TTk
)
==−=−−+
00
21
11
,,()
22
jk jk jk
jj jj
kk kk
TgppTgUpT gggUUg.
(19.1.2')
We get thus the associate expression of the kinetic energy by means of the canonical co-
ordinates. If the generalized forces derive from a simple quasi-potential, then we have
==0, 1,2,...,
j
Uj s, so that =
1
0T ; as well, if the mechanical system is scleronomic,
then it results
==0, 1,2,...,
j
gj s, and =
0
0g , so that
=
0
(1/2)
j
k
j
k
TgUU
. If both
conditions are fulfilled (the mechanical system is scleronomic and the generalized forces
derive from a simple quasi-potential), then we obtain
==
0
1
0TT , so that =
2
TT
. In
this case, the relations (19.1.1) read
=
j
j
kk
pgq ,
(19.1.1'')
the generalized momenta vanishing together with the generalized velocities. This
property does no more take place if the mentioned conditions are not fulfilled.
After a partial differentiation of (18.2.15) with respect to
j
q , we multiply by
j
q and
sum for all the values of the index
j
; it results
∂∂
∂
∂
=++=+
∂∂∂∂
210
21
2
jjjj
jjjj
TT
T
T
qqqq TT
qqqq
,
where we used Euler’s theorem concerning the homogeneous functions. Adding
+
0
1
2TT to both members of this relation and using the relation (18.2.81) and the
notations (18.2.15''), (18.2.15'''), we may write
=+−+
0
11
()
22
jj j j j
Tqp gUqg,
(19.1.3)
obtaining thus a new remarkable expression for the kinetic energy.
By an analogous calculation, the associate expression of the generalized quasi-
potential (18.2.22) will be of the form
=+ = =− + +
00 0
11
,, ()
j
kjk
j
kkk
UU UU gpU gUg U U
,
(19.1.4)
hence a sum of a linear form and a constant with respect to the generalized momenta. In
case of a simple quasi-potential (
= 0
j
U ), we have ==
00
UU U
.
Observing that
+=
11
0TU , the associate expression of the kinetic potential
(18.2.34) is given by
MECHANICAL SYSTEMS, CLASSICAL MODELS
118
=+ = =− + + ++
00 00
222
1
,, ()()
2
jk
jj
kk
TggUgUgU
LLLL L
,
(19.1.5)
hence it will be a sum a quadratic form and a constant with respect to the generalized
momenta. In case of a scleronomic mechanical system and of forces which derive from
a simple quasi-potential we have
=
00
UL , while
2
L is a positive definite form in the
generalized momenta.
We notice that one can make the transformation (18.2.80) in case of a non-natural
mechanical system too, if the condition (18.2.34''') is fulfilled. Indeed, in this case the
Jacobian of the functions
∂∂
j
qL is the Hessian of the kinetic potential; thus, the
theorem of implicit functions allows to calculate
=
12 1 2
( , ,..., , , ,..., ; )
ss
jj
qqqq qpp pt ,
= 1,2,...,
j
s
. Obviously, these relations are linear with respect to the generalized
momenta, so that the most important results previously obtained remain valid.
19.1.1.2 Donkin’s Theorem. Legendre’s Transformation
Let be a function
=
12
( , ,..., )
s
XXxx x of class
2
C
, for which the Hessian is
non-zero
∂
⎡⎤
≠
⎢⎥
∂∂
⎣⎦
2
det 0
j
k
X
xx
.
(19.1.6)
Let us consider a transformation of variables generated by the function
X in the form
∂
==
∂
, 1,2,...,
j
j
X
yjs
x
.
(19.1.7)
We can state
Theorem 19.1.1 (Donkin). A transformation (19.1.7) for which the condition (19.1.6) is
fulfilled being given, there exists a transformation, inverse to this one, generated by a
function
=
12
( , ,..., )
s
YYyy y of class
1
C , by means of the relations
∂
==
∂
,1,2,...,
j
j
Y
xjs
y
.
(19.1.7')
The two functions are linked by the relation (we assume that the variables
i
x are
expressed with the aid of the variables
j
y ; as well, the function Y too)
+=
j
j
XY xy.
(19.1.8)
If
=
12 1 2
( , ,..., ; , ,..., )
sm
XXxx xαα α , where =, 1,2,...,
k
kmα , are given parame-
ters, then we have
=
12 1 2
( , ,..., ; , ,..., )
sm
YYyy yαα α too, so that

Hamiltonian Mechanics
119
∂∂
=− =
∂∂
, 1,2,...,
kk
YX
km
αα
.
(19.1.9)
Indeed, the Hessian of the function
X coincides with the Jacobian of the functions
in the second member of the relations (19.1.7); on the basis of the condition (19.1.6),
the theorem of implicit functions shows that, using the mentioned relations, we can
obtain
==
12
( , ,..., ), 1,2,...,
s
jj
xxyy yj s. Calculating the function Y from the
relation (19.1.8) and expressing it by means of the variables
=, 1,2,...,
j
yj s, we
obtain
()
∂∂
∂∂ ∂
=−=+−
∂∂ ∂ ∂∂
kk
j
kk k
j
jjj
k
xx
YX
xy X y x
yy y xy
.
Taking into account the relations (19.1.7), we get the relations (19.2.7'), which are
thus justified. If in the function
X intervene also the parameters
j
α , 1,2,...,jm= ,
then these ones intervene in the direct transformation (19.1.7) too; hence, we have
to do with
12 1 2
( , ,..., ; , ,..., )
sm
jj
xxyy yαα α= , 1,2,...,
j
s= , as well as with
=
12 1 2
( , ,..., ; , ,..., )
sm
YYyy yαα α . We can calculate
()
∂∂
∂∂ ∂ ∂ ∂
=−=−−=−
∂∂ ∂ ∂∂∂ ∂
kk
kk k
j
jjjjj
k
xx
YXXX
xy X y
x
αα α αα α
,
where we took into account (19.1.7). The theorem stated by Donkin in 1854 is thus
completely proved.
The passing from the variables
j
x
to the variables
j
y
, considered above, is known
as Legendre’s transformation.
For instance, in the mathematical modelling of thermodynamics, where
=XH is
the enthalpy,
−=YG is Gibbs’s function of state, = 1s , =
1
xS is the entropy,
while
=
1
yT is the absolute temperature, takes place the relation
−=HG ST, (19.1.10)
the product
ST being the bound energy; the relations
∂∂
==−
∂∂
,
HG
TS
ST
(19.1.10')
take place.
19.1.1.3 Canonical Equations
We will use Donkin’s theorem and Legendre’s transformation to establish the
equations of motion of the representative point
∈
2s
P Γ . We take thus =X L ,
=
j
j
xq , =
j
j
yp, ==, 1,2,...,
jj
qj sα , as well as =
m
tα , =+1ms ; because of
MECHANICAL SYSTEMS, CLASSICAL MODELS
120
the condition (18.2.34'''), the condition (19.1.6) is fulfilled. We introduce the function
=YH, called Hamilton’s function (Hamiltonian), in the form
=−
jj
Hpq L
.
(19.1.11)
If
=−
jj
Hpq
L , then it results =
12 1 2
( , ,..., , , ,..., ; )
ss
HHqq qpp pt. We may
write
∂∂
==
∂∂
,
jj
j
j
H
pq
qp
L
,
(19.1.12)
∂∂∂∂
=− =
∂∂∂∂
,
jj
HH
qqtt
LL
,
(19.1.12')
for
= 1,2,...,
j
s . If in Lagrange’s equations (18.2.38) we take into account the first
relations (19.1.12), then we can replace these relations by the equivalent system
∂∂
==−
∂∂
,
jj
j
j
pp
qq
LL
.
(19.1.13)
Using the first relations (19.1.12') and associating the last relations (19.1.12), there
result the equations of motion (given by Hamilton in 1834) of the representative point
P
in the space
2s
Γ
in the normal form
∂∂
==−=
∂∂
, , 1,2,...,
jj
jj
HH
qp js
pq
.
(19.1.14)
These equations are the canonical equations of Hamiltonian mechanics (Hamilton’s
equations) (Hamilton, W.R., 1890).
Using the relation of definition (19.1.11), we get
∂
∂∂∂
⎛⎞
⎛⎞
=− + − + −
⎜⎟
⎜⎟
∂∂∂∂
⎝⎠
⎝⎠
∂
∂∂
⎛⎞
=+ −
⎜⎟
∂∂∂
⎝⎠
,
.
k
jj
k
jjj
k
k
j
k
jj
k
q
H
pp p
pqqq
q
H
qp
pqp
LL
L
If the system (19.1.13) is verified, then one obtains Hamilton’s equations. On the other
hand, if the canonical equations are verified, then the second relations obtained above
lead to the first equations (19.1.13); indeed, one obtains a homogeneous system of
linear algebraic equations for which the determinant of the coefficients
∂∂det[ / ]
j
k
qp
is the inverse of the determinant
∂∂det[ / ]
j
k
pq
, which is thus the Hessian (18,2,34'''),
hence being non-zero (if
=+TUL , then this determinant is equal to 1/g ). Then,
the first above relations lead to the last equations (19.1.13). We can thus state that
Hamilton’s equations are equivalent to the equations (19.1.13), which – at their turn –
are equivalent to Lagrange’s equations.