Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

Lagrangian Mechanics
101
If the intersections of the surfaces
= const
j
q and = const
k
q taken two by two are
the curves
≠≠,
i
Ci j ≠≠ki, =,, 1,2,3ijk (Fig. 18.9), then the element of arc on
these curves is given by
()
==
1
dd!,1,2,3
2
iii
sAqi ,
(18.3.40)
so that
=
2
ddd
ii
sss.
(18.3.39'')
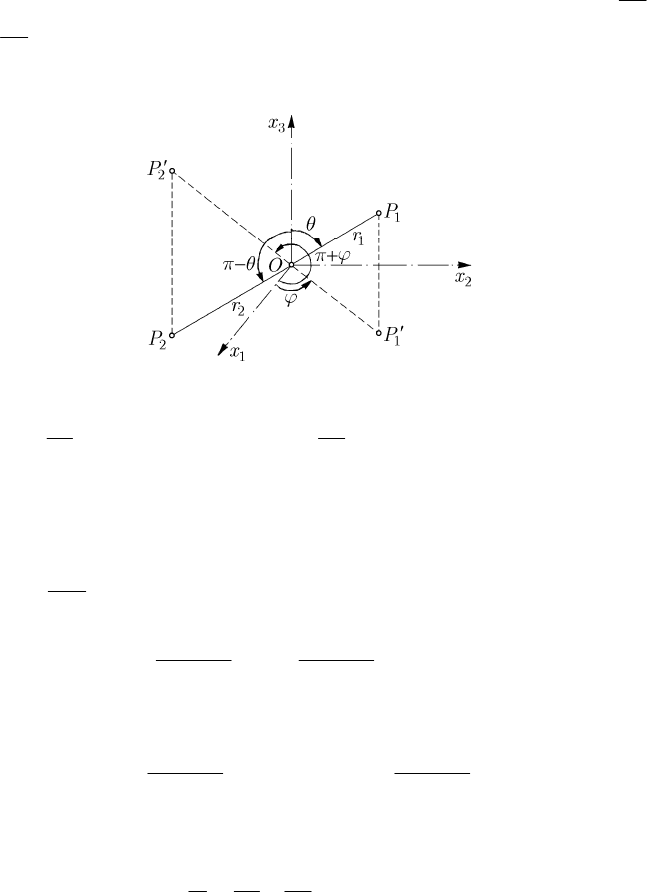
Fig. 18.9 Elliptic co-ordinates in
3
E
The kinetic energy is calculated in the form
()
()
==++
2
222
11 22 33
d
2d 8
ms m
T AqAqAq
t
,
(18.3.41)
allowing thus to obtain Lagrange’s equations. We decompose the given force
F along
the tangents to the curves
123
,,CCC
, hence let be
=++FF F F
123
; the
corresponding virtual work will be
⋅δ = δ = δFr
ii ii
Qq Fs. Taking into account
(18.3.40), it results
()
==
1
!, 1,2,3
2
iii
QFAi .
(18.3.42)
In case of a plane motion, we can use elliptic co-ordinates in the plane
12
Ox x
, the
corresponding formulae being obtained by particularization (we make
33
0, 0xq==)
from the above ones. The homofocal conics will be an ellipse and a hyperbola (Fig. 18.10).
If the given forces are conservative or quasi-conservative, then we can use the results
in Sect. 18.1.1.3 concerning natural systems.
Lagrange’s equations can be written also in the vector form
MECHANICAL SYSTEMS, CLASSICAL MODELS
102
′′
∂∂
⎛⎞
−=
⎜⎟
∂∂
⎝⎠
F
vr
d
d
TT
t
,
(18.3.43)
with respect to a non-inertial frame of reference
R (the generalized co-ordinates are taken
with respect to this frame); in this case, the kinetic energy is given by
′′
=+++
vv r
2
(/2)( )
O
Tm ω . We notice that
′
v
2
O
is a known function of time and
can be expressed as the total derivative with respect to time of another function; hence,
this term can be omitted from calculation (Lagrange’s function – inclusive the kinetic
energy – is determined excepting the total derivative with respect to time of an arbitrary
function). On the other hand, we notice that
()
()
′
⋅
⎡
⎤
′′ ′
⋅+×= ⋅= −⋅
⎢
⎥
⎣
⎦
vr
r
vv r v ar
d
d
dd
O
OO O
mmm
tt
ω
;
Fig. 18.10 Elliptic co-ordinates in
2
E
the total derivative with respect to time can be, as well, neglected. Thus, we can use the
conventional kinetic energy
()
′
=+⋅×−⋅
vvrar
2
11
22
O
Tm m m
ω .
(18.3.44)
We can calculate
() ()
[]
′
=+×⋅− +×+××⋅
vrva v rrdd d
O
Tm m
ωωωω,
wherefrom
() ()
[]
∂∂
′
=+× =− +×+××
∂∂
vr a v r
vr
,
O
TT
mm
ωωωω.
(18.3.44')
The equation (18.3.43) leads thus to the equation of motion
()
[]
′
=− +×+× × − ×
v
Fa r r v
d
2
d
O
mm m
t
ωωω ω,
(18.3.45)
Lagrangian Mechanics
103
written with respect to the non-inertial frame of reference
R ; the transportation force
and the Coriolis force are thus put in evidence (see Sect. 10.2.1.1 too)
18.3.2.2 Case of a Particular Conservative Force
We consider the motion of a particle P acted upon by a conservative force which
derives from the simple potential
=++
222
() ()
(,, ) ()
sin
gh
Ur fr
rr
θϕ
θϕ
θ
,
(18.3.46)
expressed in spherical co-ordinates. Noting that
=∂ ∂/
r
QUr, =∂ ∂/QU
θ
θ and
=∂ ∂/QU
ϕ
ϕ , we obtain Lagrange’s equations in the form
()
⎡
⎤
′
−+ = − +
⎢
⎥
⎣
⎦
222
322
()
12
sin ( ) ( )
sin
h
rr fr g
m
mr r
ϕ
θθϕ θ
θ
,
()
⎡
⎤
′
−=−
⎢
⎥
⎣
⎦
22 2
224
d2sin2
2sin2 ()()
d
sin
rr g h
t
mr r
θ
θθϕ θϕ
θ
,
(18.3.47)
()
′
=
22
22
()
d
sin
d
sin
h
r
t
mr
ϕ
θϕ
θ
,
where we have denoted by “prime” the derivative of the functions
and , fg h with
respect to the corresponding variables.
The third equation (18.3.47) can be written also in the form
()
()
22 22 442
sin sin d sin ( ) d ( )d d ( ),
2
m
mr r r h t h hθϕ θϕ θϕ ϕ ϕ ϕ ϕ ϕ
′′
====
so that we obtain the first integral
[]
=+
442
1
2
sin ( )rhC
m
θϕ ϕ ,
(18.3.48)
where
1
C is an integration constant; as well, the second equation (18.3.47) reads
()
1
2442
22
24 4
2
d1 sin2 2 sin2
2()sin(),
d
sin sin
C
rg r h
tm
mr mr
r
θθ
θθ θϕϕ
θθ
⎡⎤
⎡⎤
′
−= −=
⎢⎥
⎢⎥
⎣⎦
⎣⎦
where we took into account the first integral previously found. Multiplying by
2
r θ
, one
obtains
() ( )
()
⎡
⎤
′
== +
⎢
⎥
⎣
⎦
⎡⎤
=−
⎢⎥
⎣⎦
22 42
1
4
1
2
2sincos
2d d ()d2 d
sin
21
() d ,
sin
rr r g tC t
m
gC
m
θθ
θθ θ θθ θ
θ
θ
θ
MECHANICAL SYSTEMS, CLASSICAL MODELS
104
resulting the first integral
⎡
⎤
=++
⎢
⎥
⎣
⎦
1
42
2
2
2
()
sin
C
rg C
m
θθ
θ
,
(18.3.48')
where
2
C is a new integration constant. Eliminating the terms
2
rθ
and
22
sinr θϕ
between the first equation (18.3.47) and the first integrals (18.3.48), (18.3.48'), we
obtain
′
−=
2
3
1
2()
C
rfr
m
mr
.
Multiplying by
drt and integrating, we get the third first integral
[]
+= +
2
2
3
2
1
22()
C
rfrC
m
mr
,
(18.3.48'')
where
3
C
is a new integration constant. As a matter of fact, one can obtain this result
starting from the first integral of the mechanical energy and taking into account the first
integrals previously obtained.
The first integral (18.3.48'') contains only one space variable, so that
⎡
⎤
=± = − +
⎢
⎥
⎣
⎦
2
11 3
2
d1
(), () 2() 2
d
C
r
fr fr fr C
tm
r
,
(18.3.49)
wherefrom, by a quadrature, one gets
t as a functions of r and then = ()rrt,
introducing the fourth integral constant
4
C . Analogously, the first integral (18.3.48')
leads to
⎡
⎤
=± = − +
⎢
⎥
⎣
⎦
1
12
2
2
11
dd 2
,() ()
sin
() ()
C
r
gg C
m
rfr g
θ
θθ
θ
θ
.
(18.3.49')
By two quadratures, we obtain
= ()rθθ and then = ()tθθ, a new integration
constant
5
C being introduced. Finally, the first integral (18.3.48) allows to write
[]
=± = +
11
2
11
dd 2
,() ()
() sin ()
hhC
m
hg
ϕθ
ϕϕ
ϕθθ
,
(18.3.49'')
where we have used the previous result; hence, one obtains
= ()ϕϕθ and then one
gets
= ()tϕϕ , appearing the integration constant
6
C .
The integration constants
=, 1,2,...,6
k
Ck , are then determined by means of the
initial conditions.
The case of loading of a particle
P , considered above, is useful in many particular
cases of great interest.
Lagrangian Mechanics
105
18.3.2.3 Problem of Two Particles
Let be two particles
1
P and
2
P of masses
1
m and
2
m , ≥
12
mm, respectively; the
mass centre
O is on the segment of a line
12
PP , so that ==
1
11 22 1
,mr mr r OP ,
=≤
2
212
,rOPrr (Fig. 18.11). In spherical co-ordinates, we have
11
(,,)Prθϕ ,
−+
22
(, , )Prπθπϕ, and the kinetic energy can be expressed in the form
Fig. 18.11 Problem of two particles
()()
=++ +++
12
222222 222222
11 1 22 2
sin sin
22
mm
Trrr rrrθθϕ θθϕ
.
We introduce the notations
+= +=
222222
11 22 11 22
,mr mr mr mr mr mr, with
+=
12
rr r
,
(18.3.50)
where
=
12
rPP; we get
==
++
21
12
12 12
,
mm
rrrr
mm mm
,
so that
+= +=
++
12 12
22 222 2
11 22 11 22
12 12
,
mm mm
mr mr r mr mr r
mm mm
.
Comparing with the notations which have been introduced, we must have
=+
12
111
mm m
.
(18.3.50')
Thus, the motion of relation about the mass centre
O is specified by the generalized co-
ordinates
===
123
,,qrq qθϕ, corresponding to three degrees of freedom. The
kinetic energy will be thus given by
MECHANICAL SYSTEMS, CLASSICAL MODELS
106
()
=++
222222
1
sin
2
Tmrr r
θθϕ
.
(18.3.51)
Assuming that the two particles are acted upon only by forces of Newtonian
attraction, the potential function being
=
12
mm
Uf
r
,
(18.3.51')
we obtain the case considered in the preceding section, with
=
12
() /fr fmm r and
==() ( ) 0ghθϕ; the problem is thus reduced to quadratures.
18.3.2.4 Problem of Two Centres
Let be a particle subjected to the attraction of two fixed centres
1
C and
2
C , in an
inverse proportion to the squares of the distances
==,1,2
kk
rPCk , to these centres;
the potential of the corresponding forces is
=+
12
12
kk
U
rr
,
(18.3.52)
where
>
12
,0kk are positive constants. We can study this problem in spherical co-
ordinates too, by means of the results obtained in Sect. 18.3.2.2.
But we can study the problem also with the aid of the elliptical co-ordinates
introduced in Sect. 18.3.2.1. If, in this order of ideas, we denote
() ()
== + == −
112212
11
,
22
qrrqrr
λμ,
(18.3.53)
then the curves
= constλ represent ellipses, the semi-major axes of which are equal to
λ , and the curves = constμ are hyperbolae the semi-major axes of which are equal to
μ ; these curves are homofocal (they have common foci
1
C and
2
C ) and orthogonal
one to the other. Observing that
+= −= =
12 12 12
min( ) 2 , max 2 , 2rr c rr ccCC, it
results the relation of condition
≥≥cλμ; in this case, the equations of the families
of ellipses and hyperbolae will be
+=+=
−−
22 22
12 12
222 222
1, 1
xx xx
cc
λλ μ μ
.
(18.3.54)
By logarithmic differentiation, we can calculate the kinetic energy in the form
()()
⎛⎞
=+=− +
⎜⎟
−−
⎝⎠
2
2
22 22
12
22 2 2
22
mm
Txx
cc
μ
λ
λμ
λμ
.
(18.3.55)
Taking into account (18.3.53), we obtain the potential
Lagrangian Mechanics
107
()()
[]
=+−−
−
12 12
22
1
Ukkkk
λμ
λμ
,
(18.3.55')
observing thus that we have a system of Liouville type (see Sect. 18.3.1.2). Because
==−
=+ =−
22
11 22
11 1 2 22 1 2
() , () ,
() ( ), () ( ),
uq uq
Uq k k Uq k k
λμ
λμ
==−
−−
==
−−
11 22
22 22
12
22 2 2
() , () ,
d
d
d,d,
mm
Vq Vq
cc
Wm Wm
cc
λμ
μ
λ
λμ
=− = =−
22
12
,, ,u λμααα α
the system of equations (18.3.7) leads to
−=
−=+
∫∫
∫∫
1
22
2
d
d2
,
() ()
d
d2
(),
() ()
m
t
m
μ
λ
β
ϕλ ψμ
μ
λ
λμ β
ϕλ ψμ
(18.3.56)
with the notations
=− ++ +
=− +− +
22 2
12
22 2
12
() ( )[ ( ) ],
() ( )[ ( ) ],
ch k k
ch k k
ϕλ λ λ λ α
ψμ μ μ μ α
(18.3.56')
where
h is the constant of mechanical energy, while and
12
,αβ β are three other
integration constants.
We denote by
and
12 12
,,λλ μμ pairs of two simple roots, differing from ±c , of the
equations
=() 0ϕλ and =() 0ψμ , respectively, and let be the integrals
==
==
∫∫
∫∫
22
11
22
11
11 12
22
21 22
d
d
,,
() ()
d
d
,.
() ()
λμ
λμ
λμ
λμ
μ
λ
ωω
ϕλ ψμ
μ
λ
ωλ ω μ
ϕλ ψμ
(18.3.57)
We introduce also the quantities
and
12
νν by relation
+= +=+
11 1 12 2 1 21 1 22 2 2
,()tων ων πβ ων ων π β .
(18.3.58)
The relations (18.3.56) define thus
andλμ as double periodical (elliptic) functions of
1
β
and
+
2
t β or (with the relations (18.3.58)) of and
12
νν. If a relation of the form
MECHANICAL SYSTEMS, CLASSICAL MODELS
108
+= ∈
111 212 1 2
0, ,nn nnωω ` , takes place, hence if and
11 12
ωω are commensurable
quantities, then the motion is strictly periodic with the period
=+
121 222
22( )Tn nωω. If
the roots
and
12 12
,,λλ μμ, respectively, are double, then we have so called motions of
libration (called periodical conditioned motions too), important in the classical quantum
theory.
18.3.2.5 Motion of an Electrized Particle in an Electromagnetic Field
Let be an electrized particle P of electric charge q (eventually, an electron), which
is in motion with the velocity
v in an electromagnetic field EB{, }, where E is the
intensity of the electric field and
B is the magnetic induction (see Sect. 18.1.1.4).
Lorentz’s generalized force (18.1.36) derives from the generalized quasi-potential
(18.2.37'). We obtain thus Lagrange’s kinetic potential
=+⋅−vAv
2
0
1
()
2
mq A
L
,
(18.3.59)
where
=AA
123
(,, ;)xxxt is the vector magnetic quasi-potential, while the scalar one
is
=
00
123
(,, ;)AAxxxt. If one observes that =+ =d/d , 1,2,3
iii
vmvqAiL ,
then Lagrange’s equations (18.3.38) read
()
()
+= − ==
,0,
d
0, 1,2, 3
d
ii jji i
mv qA q v A A i
t
.
We assume that the velocities do not depend on the point but only on the time.
Calculating the total derivative
=∂ ∂ +d/d ( / )
iijji
At AxvA, Lagrange’s
equations become
()
=−−−=
⎡⎤
⎣⎦
,, 0,
d
,1,2,3
d
i
ji ij j i i
v
mqAAvAAi
t
.
(18.3.60)
The relations (18.1.36') and (18.1.36'') can be scalarly written in the form
=∈ = − + =
0,
,
,( ),1,2,3
iiii
ijk k j
BAEAAi
.
It is seen that the equations (18.3.60) represent, in fact, the projections on the three
axes of co-ordinates of Newton’s equation of motion
()
=+×
v
EvB
d
d
mq
t
,
(18.3.60')
where we have Lorentz’s generalized force (18.1.36); for this, one takes into account
the above relations and the relation
()
()
()
×=∈ =∈ ∈
=− =−
vB
,
,,
,
.
jj
ijk k ijk klm m li
j
mim j ji ijj
il jl m l
vB v A
vA A A v
δδ δ δ

Lagrangian Mechanics
109
To take into account the relativistic aspect of the problem, one must introduce the
mass
=−
2
0
1(/)mm vc, where
0
m is the mass at rest, while c is the velocity of
propagation of light in vacuum.
18.3.2.6 Motion of the Rigid Solid
A free rigid solid S has six degrees of freedom and we can use, e.g., the
generalized co-ordinates
′
==,1,2,3
i
Oi
qxi , =
4
q ψ , =
5
q θ , =
6
q ϕ , where
′
Oi
x
are the co-ordinates of a point
O of it with respect to an inertial frame of reference
′
R , while ψ , θ and ϕ are Euler’s angles, which specify the rotation about the point
O . If a certain point
0
P of the solid is compelled to slide (without friction) on a given
surface, then it will have only two degrees of freedom, appearing thus a holonomic
constraint relation; analogously, if the point
0
P is compelled to stay on a given curve,
then there result two holonomic constraint relations. Especially, if to the point
0
P is
imposed a given motion, then the rigid solid is subjected to three holonomic constraints;
in particular, the point
0
P (taken – in this case – as a pole O of a non-inertial frame
R ) can be fixed. In each of these cases, one searches convenient generalized co-
ordinates, by eliminating the respective constraints; thus, in case of a rigid solid with a
fixed point, we can choose as generalized co-ordinates Euler’s angles, the kinetic
energy being of the form (15.1.13), where
123
,,III are the principal moments of
inertia with respect to the fixed point. We notice that
ψ is a hidden co-ordinate, so that
′
∂
⎛⎞
=
⎜⎟
∂
⎝⎠
d
d
T
Q
t
ψ
ψ
.
(18.3.61)
For instance, in case of the motion of a heavy homogenous rigid solid of revolution
of mass
M , which slides frictionless on a fixed horizontal plane (see Sect. 17.1.2.4),
the kinetic energy reads
[]
{
}
22 2 2 22
12 3
1
()() sin(cos),
2
TM Mf JJ I
ρρ θ θ ψ θ ϕψθ
′′′′
=++++ ++
(18.3.62)
where
′′
12
,ρρ and
′
=
3
()fρθ are the co-ordinates of the mass centre
C
with respect to the
inertial frame of reference
′
R and where
==
12
JI I
; the potential of its weight is
=− ()UMgfθ .
(18.3.62')
We can use thus the generalized co-ordinates
′′
=====
5
11223 4
,,,,qqqqqρρϕψθ.
The first four equations of Lagrange are written in the form (
and
′′
12
,,ρρψ ϕ are hidden
and ignorable co-ordinates)
′ ′′′
∂ ∂∂∂
⎛⎞
⎛⎞ ⎛⎞
⎛⎞
= ===
⎜⎟
⎜⎟ ⎜⎟
⎜⎟
′′
∂∂∂
⎝⎠ ∂
⎝⎠ ⎝⎠
⎝⎠
12
d ddd
0, 0, 0, 0
d ddd
T TTT
t ttt
ρρϕ
ψ
,
MECHANICAL SYSTEMS, CLASSICAL MODELS
110
being thus led to the first integrals
′′′′
==+=
′
++ =
12
3
00 0
12 3
2
3
,,cos,
sin ( cos )cos ,
CC
C
JI K
ρνρνϕψθω
ψθ ϕψθθ
(18.3.63)
where we have used the notations in Sect. 17.1.2.4. Instead of the fifth equation of
Lagrange, we can use the first integral of mechanical energy, the problem being thus
entirely formulated.
An important case is that of the rigid solid for which three non-collinear points have
a given motion in a fixed (or mobile) plane; the problem is thus reduced to the motion
of a mechanical system in a plane (or of a plane solid rigid), which has only three
degrees of freedom, corresponding to the translation of a point (two degrees of
freedom) and to the rotation about this point (one degrees of freedom).
In the case of a system of rigid solids, one must keep in mind the connections
between them. E.g., a hinge between two rigid solids involves the introduction of three
holonomic constraints (we can imagine a free rigid solid, the second one having a point
with a given motion).
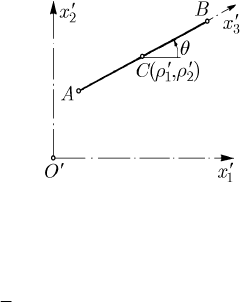
18.3.2.7 Plane Motion of a Rigid Straight Bar
Let be a rigid straight bar AB which moves frictionless in the plane
′′′
12
Oxx , being
acted upon by forces in direct proportion to the mass and to the distance to the
′′
1
Ox -axis (we have chosen a system of particular forces, to fix the ideas). The position
of the bar is specified by the co-ordinates
′
1
ρ and
′
2
ρ of the mass centre C and by the
angle
θ
made with the fixed axis
′′
1
Ox (Fig. 18.12); we can thus choose the
generalized co-ordinates
′′
===
11223
,,qqqρρθ.
Fig. 18.12 Plane motion of a straight rigid bar
Using Koenig’s theorem, we can write the kinetic energy in the form
()
′′′
=++
⎡
⎤
⎣
⎦
22 2
12
1
2
TM I
ρρ θ
,
(18.3.64)
where
M is the mass of the bar and I is its moment of inertia with respect to the
centre of mass
C .
Let us consider a bar element
dx along the Cx -axis, which is attracted by the
′′
1
Ox -axis by the force
2
(sin)d, constkxxkμρ θ
′
−+ =
, where μ is the linear