Sha W., Malinov S. Titanium Alloys: Modelling of Microstructure, Properties and Applications
Подождите немного. Документ загружается.

Neural network models and applications 361
The neural network has been used to study the influence of different alloying
elements on transformation kinetics in titanium alloys. It has been shown
that:
• aluminium shifts the C-curve to higher temperatures and shorter times;
• vanadium shifts the C-curve to lower temperatures and longer times;
• molybdenum has a dual influence on the transformation kinetics;
• small increases in the oxygen level induce significant shifts of the C-
curve to higher temperatures and shorter times.
Using the model, TTT diagrams for a number of commercial titanium alloys
have been predicted. The predictions of the model are consistent with what
might be expected from a knowledge of titanium alloys and phase
transformation theory.
A graphical user interface for use of the model has been created. The
program and the model can be used for:
• simulation of TTT diagrams for titanium alloys as a function of chemical
composition;
• investigation of the influence of different alloying elements on the β to
α transformation kinetics in titanium alloys;
• optimisation of the chemical composition;
• significant reduction of the experimental work for measurement of TTT
diagrams for titanium alloys.
In the chapter, we have stressed the consistence between neural network
predictions and a knowledge for the phase transformations in titanium alloys,
especially in sections 14.2.2 and 14.2.3.
14.3 An example of MatLab program code
for neural network training
The following example is for one particular combination of NN parameters,
including training algorithm, transfer function and NN architecture (number
of neurons in the hidden layer). During the development of the models, these
parameters were changed in order to find the best combination of training
algorithm, transfer function and NN architecture.
%This program is a part of NN for prediction of %properties
in Ti alloys
%Rm
%Training
%the following reads data file and put it into matrix M
load tb_Rm.txt;
Titanium alloys: modelling of microstructure362
M = tb_Rm;
%Dimensions
sz = size(M);
rws = sz(1);
cls = sz(2);
%Generates random
rnd1 = rand(rws);
rnd = rnd1(:,1);
M_r = M;
M_r(:,16) = rnd;
M_r = sortrows(M_r,16);
M = M_r(:,1:15);
%The next divide the data into train and test groups
M_all = M(1:rws,:);
M_tr = M(1:471,:);
M_val = M(471:rws,:);
%inputs
PP_all = M_all(:,2:14);
PP_tr = M_tr(:,2:14);
PP_val = M_val(:,2:14);
%outputs
TT_all = M_all(:,15);
TT_tr = M_tr(:,15);
TT_val = M_val(:,15);
p_all = PP_all’;
p_tr = PP_tr’;
p_val = PP_val’;
t_all = TT_all’;
t_tr = TT_tr’;
t_val = TT_val’;
%normalization
[pn_tr,minp_Rm,maxp_Rm,tn_tr,mint_Rm,maxt_Rm] =
premnmx(p_tr,t_tr);
Neural network models and applications 363
%min and max of the input
PR = [min(pn_tr’); max(pn_tr’)]’;
%creating a network
net_Rm=newff(PR, [13,1], {‘tansig’, ’purelin’}, ’trainbr’);
%training parameters
net_Rm.trainParam.show = 5;
net_Rm.trainParam.lr = 0.01;
net_Rm.trainParam.epochs = 250;
net_Rm.trainParam.goal = 0.00000001;
%training
net_Rm=train(net_Rm,pn_tr,tn_tr);
%post training analyses
an = sim(net_Rm,pn_tr);
a = postmnmx(an,mint_Rm,maxt_Rm);
figure(1)
[m(1),b(1),r(1)] = postreg(a(1,:),t_tr(1,:));
p_val_n = tramnmx(p_val,minp_Rm,maxp_Rm);
a_val_n = sim(net_Rm,p_val_n);
a_val = postmnmx(a_val_n,mint_Rm,maxt_Rm);
figure(2)
[m(2),b(2),r(2)] = postreg(a_val(1,:),t_val(1,:));
p_all_n = tramnmx(p_all,minp_Rm,maxp_Rm);
a_all_n = sim(net_Rm,p_all_n);
a_all = postmnmx(a_all_n,mint_Rm,maxt_Rm);
figure(3)
[m(3),b(3),r(3)] = postreg(a_all(1,:),t_all(1,:));
%save(’tr_Rm1’,’net_Rm’,’minp_Rm’,’maxp_Rm’,’mint_Rm’,’maxt_Rm’)
14.4 References
Cristianini N and Shawe-Taylor J (2000), An Introduction to Support Vector Machines
and Other Kernel-based Learning Methods, Cambridge: Cambridge University Press.
Titanium alloys: modelling of microstructure364
Guo Z and Sha W (2000), ‘Modelling of beta transus temperature in titanium alloys using
thermodynamic calculation and neural networks’, in: Gorynin I V and Ushkov S S
(eds), Titanium’99: Science and Technology, Proceedings of the Ninth World Conference
on Titanium, St. Petersburg, Russia: Central Research Institute of Structural Materials,
61–68.
Guo Z and Sha W (2004), ‘Modelling the correlation between processing parameters and
properties of maraging steels using artificial neural network’, Comput Mater Sci, 29
(1), 12–28.
Hu Y H and Hwang J N (eds) (2001), Handbook of Neural Network Signal Processing,
Boca Raton, FL: CRC Press.
Malinov S, Sha W and Guo Z (2000), ‘Application of artificial neural network for prediction
of time–temperature–transformation diagrams in titanium alloys’, Mater Sci Eng A,
283A (1–2), 1–10.

365
15
Neural network models and applications
in property studies
Abstract: A model is described in detail for the prediction of properties of
titanium alloys at different temperatures as functions of processing
parameters and heat treatment cycles. The chapter also discusses how to use
the model for the optimisation of processing and heat treatment parameters.
It continues with introducing a separate model, developed for prediction of
fatigue stress life S-N diagrams for Ti-6Al-4V alloy under various
conditions, again using an artificial neural network. The third part of the
chapter shows a model for the prediction of the correlation between alloy
composition and microstructure and tensile properties in γ-based titanium
aluminide alloys using ANN.
Key words: neural network, mechanical properties, fatigue, microstructure-
property correlations, tensile properties.
15.1 Correlation between processing parameters
and mechanical properties
We will present a systematic account of the artificial neural network models
for the analysis and the prediction of the mechanical properties of titanium
alloys as functions of the processing (heat treatment) parameters and alloy
composition. The work is motivated by the desire to create a tool for
optimisation of the processing parameters and the alloy composition.
15.1.1 Model description
A most general scheme of the model is given in Fig. 13.1b. The input parameters
of the neural network are alloy composition, heat treatment parameters and
work (test) temperature. The composition includes the most commonly used
alloying elements in titanium alloys, namely Al, Mo, Sn, Zr, V, Cr, Fe, Cu,
Bi, Si, Nb, Ta, Mn, and O. Typical heat treatments of titanium alloys are
taken into account: (i) annealing in α, α + β and β regions; (ii) solution
treatment in β and α + β regions followed by ageing at different temperatures;
(iii) duplex annealing. Since the titanium alloys are considered as desirable
and sometimes essential for many structural applications at high temperatures,
the test/work temperature is included as an input in the model. In this way,
the model is extended to trace the correlation ‘processing parameters – working
conditions (temperature) – mechanical properties’.
The outputs of the neural network model are the nine most important
mechanical properties, namely ultimate tensile strength, tensile yield strength,
Titanium alloys: modelling of microstructure366
elongation, reduction of area, impact strength, hardness, modulus of elasticity,
fatigue strength and fracture toughness.
Data set and input/output parameters
The database was constructed by collecting available data on mechanical
properties for titanium alloys with different heat treatment conditions and
working temperatures. In total, 764 input/output data pairs were collected
(see Appendix at the end of this chapter for list of the alloys used).
The selection of the input parameters is a very important aspect of neural
network modelling. Before training, the number of input parameters should
be restricted by ignoring the dependent input parameters. In this model the
following were used as input parameters.
Alloy composition
After pre-processing analysis, the 14 alloying elements initially chosen (see
above) were reduced to 11, namely Al, Mo, Sn, Zr, Cr, Fe, V, Si, Nb, Mn and
O. Cu, Bi and Ta were each contained in only one alloy, Ti-2.5Cu (IMI 230),
Ti-6Al-2Sn-1.5Zr-1Mo-0.35Bi-0.1Si and Ti-6Al-2Nb-1Ta-0.8Mo, respectively,
at different conditions and temperatures. The data pairs containing Cu and Bi
were excluded from the training database, while Ta, where present, was
converted to Nb equivalent. When the oxygen level of the alloy was unknown,
an amount of 0.15 wt.% was attributed. Modelling of the oxygen influence
on the mechanical properties was based on 61 data pairs with oxygen content
above 0.2 wt.% or below 0.1 wt.% (ELI alloys). For the remaining part of the
database, the oxygen content was in the range 0.1–0.2 wt.%. When iron was
not an alloying element in the titanium alloy, an amount of 0.15 wt.% was
attributed. Analysis of the database in terms of the alloy elements present is
given in Table 15.1.
Heat treatment
Nine classical heat treatment types for titanium alloys for which data in the
literature exist were taken into account in the neural network model. Since
neural networks operate with digits, the heat treatments are digitised by
means of attributing different digits to the different heat treatments. The
distribution of the heat treatments is presented in Table 15.2, showing the
number of data pairs corresponding to each type of heat treatment. Large
amounts of data are available for the two most popular heat treatments of
titanium alloys, namely annealing in the α + β field and solution treatment
in the α + β field followed by ageing.
Neural network models and applications in property studies 367
Table 15.1
Analysis of the chemical composition (concentration in wt. %) of the alloys used for training and test
Element Al Mo Sn Zr Cr Fe V Cu
(a)(d)
Bi
(b)(d)
Si Nb Ta
(c)(e)
Mn O
Number of data 699 467 247 275 163 175
(f)
272 3 7 150 105 39 21 61
(g)
pairs containing
this element
Minimum 0 0 0 0 0 0.15 0 2.5 0.35 0 0 1 0 0.05
Maximum 8 15 11 11 11 5 16 2.5 0.35 0.5 7 1 8 0.33
Mean 4.91 4.89 3.38 4.73 4.78 1.36 6.49 2.5 0.35 0.20 1.98 1 4.90 0.16
Standard deviation 1.69 4.70 2.08 2.78 3.63 0.92 4.32 0.0 0.00 0.11 0.89 0 3.33 0.09
(a) Only in one alloy (Ti-2.5Cu (IMI 230));
(b) Only in one alloy (Ti-6Al-2Sn-1.5Zr-1Mo-0.35Bi-0.1Si);
(c) Only in one alloy (Ti-6Al-2Nb-1Ta-0.8Mo);
(d) Excluded from the data set;
(e) Converted to niobium;
(f) Number of data pairs containing iron as an alloying element;
(g) Number of data pairs containing oxygen different from the usual.
Titanium alloys: modelling of microstructure368
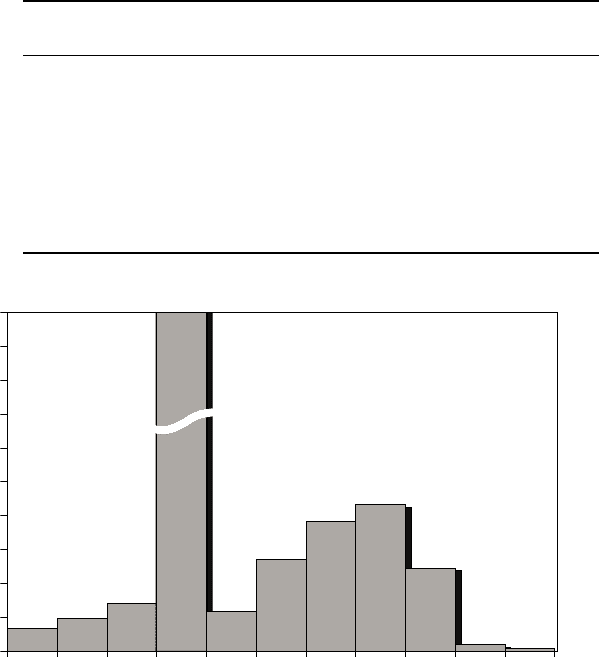
Temperature
Most of the data on the different mechanical properties are at room temperature
(see Fig. 15.1). However, there are many data at –193, –70, –62, 20, 100,
200, 300, 316, 350, 400, 427, 450, 480, 500, 538, 550 and 600 °C. Some data
for mechanical properties at very low (–253 °C) as well as at very high (800
°C) temperatures were collected. The analysis of the database distribution is
presented in Fig. 15.1, in a form of a histogram showing the number of data
pairs in each temperature interval. This analysis shows that the model can
work with sufficient accuracy within the temperature interval of –100 to
+600 °C.
Table 15.2
Heat treatments used in the database and their digitising
Heat treatment Number of Digitising
data pairs
Without heat treatment 16 0
Annealing (β)451
Annealing (α+β) 237 2
Annealing (α)293
Solution treatment (β)184
Solution treatment (α+β)135
Solution treatment (β) and ageing 29 6 + (1-
T
age
/
T
transus
)
Solution treatment (α+β) and ageing 247 7 + (1-
T
age
/
T
transus
)
Duplex annealing 130 8
Number of data pairs
200
180
160
140
120
100
80
60
40
20
0
–250 –150 –50 50 150 250 350 450 550 650 750
T
(°C)
408
13
19
28
23
54
77
87
49
4
2
15.1
Distribution in the database of mechanical properties of titanium
alloys versus test/working temperature.
Neural network models and applications in property studies 369
Different numbers of data pairs for the different mechanical properties
were collected (Table 15.3). Most of the data are for tensile test properties,
but there is also a sufficient amount of data for the other mechanical properties.
The ranges of variation of the properties, as well as the conditions at which
data with respect to the alloy composition, heat treatment and temperature
exist, are shown in Table 15.3.
Neural network training
The choice of transfer function is one of the decisions which must be made
by the user, although it is not usually a very critical factor. In their infancy,
neural networks were trained using a method known as backpropagation.
The method suffers from the drawback that the adjustments which reduce
the errors (improvement of error) on a given set of data, may increase the
errors on the other sets of data, so the process is constantly undoing the
improvements made so far.
A much better approach has turned out to be to use one of the many
methods of numerical optimisation which have been developed for solving
nonlinear sums-of-squares problems. The nonlinearity arises because the
relationships between outputs and weights of an artificial neural network are
nonlinear, although well defined. It is this nonlinearity which makes it necessary
to use iterative methods. The most efficient method in most cases is the
Gauss–Newton algorithm, but this method can suffer from numerical instability
unless the initial estimate of the weights is fairly accurate, so it is unreliable.
On the other hand, the method of steepest descent is reliable, but highly
inefficient. In fact, backpropagation becomes equivalent to steepest descent
when adjustments are made, not for each error separately, but to all at once
– so-called batch-backpropagation. The method used in this book is the
Levenberg–Marquardt algorithm, which can be regarded as a compromise
between Gauss–Newton and steepest descent, heavily favouring the former.
Typically, the use of Levenberg–Marquardt leads to a reduction of orders of
magnitude in the number of training iterations required compared with
backpropagation, and is highly reliable.
The general model of the neural network (Fig. 13.1b) consists of separate
neural network models for each output mechanical property. In the general case,
these models include 13 neurons in the input layer, 13 neurons in the hidden layer
and 1 neuron in the output layer. The most accurate predictions of the neural
networks are obtained with the hyperbolic tangent sigmoid transfer function.
Neural network test and performance
The predicted values from the trained neural network outputs track the targets
very well (see the performance example shown in Fig. 15.2). Acceptable
Titanium alloys: modelling of microstructure370
Table 15.3
Analysis of the output data for training and test of neural network for prediction of the mechanical properties of titanium
alloys
Output Number Min. Max. Mean Standard Temperature
of data deviation range (°C)
Tensile strength (MPa) 707 151 2250 975 282.65 –253 to 800
0.2% yield strength (MPa) 662 97 2050 859 282.89 –253 to 800
Elongation (%) 581 1 50 13 6.51 –253 to 800
Reduction of area (%) 421 4 92 38 17.80 –196 to 800
Charpy impact strength (J) 124 8 119 33 21.62 –196 to 500
Rockwell hardness (HRC) 98 24 57 36 5.56 –253 to 300
Modulus of elasticity (GPa) 259 57 140 105 13.37 –253 to 800
R
–1
fatigue strength (MPa)* 74 220 900 537 140.07 20 to 600
K
1C
fracture toughness (MPa-m
1/2
)** 69 24 176 78 34.44 –253 to 316
*No data for solution treatment (β).
**No data for manganese.