Seely F.B. Analytical Mechanics for Engineers
Подождите немного. Документ загружается.

BALANCING
OF
ROTATING
MASSES
371
to
exert
forces
on the
bearings
which
in
turn
are transmitted
to
the
machine
frame.
The
reactions
at
the
bearings may
be elim-
inated
by
balancing
the
rotating
mass.
This
may
be done
by
the
addition
of
a
single
mass
M
2
diametrically opposite
to
MI
(Fig.
3846),
the center
of
gravity
of
M
2
being
at
a
distance
r
2
from
the
axis of
rotation,
such
that,
TFi._ ,
W2
9
But,
since
--
is
a common
factor,
the
conditions
for
running
or
dynamic
balance
may
be
expressed by
the
equation
nf our o
"
1 o
'K
2
Mirior
=
M
2
r
2
ur
or
rior=
-If
a
shaft
carries
Now,
as
is evident
from
Fig.
384(6),
this
equation
expresses
the
condition
for
standing
balance
also.
Thus,
a
shop
method of
obtaining
approximate
running
balance
with
a
rotating
member,
in
which
the
material is
substantially
in
a
plane
of rotation
such as
a
disc,
a
pulley,
or
a
flywheel,
consists
in
drilling
out
material on the
heavy
side or
adding
material on the
light
side until
standing
bal-
ance
is obtained.
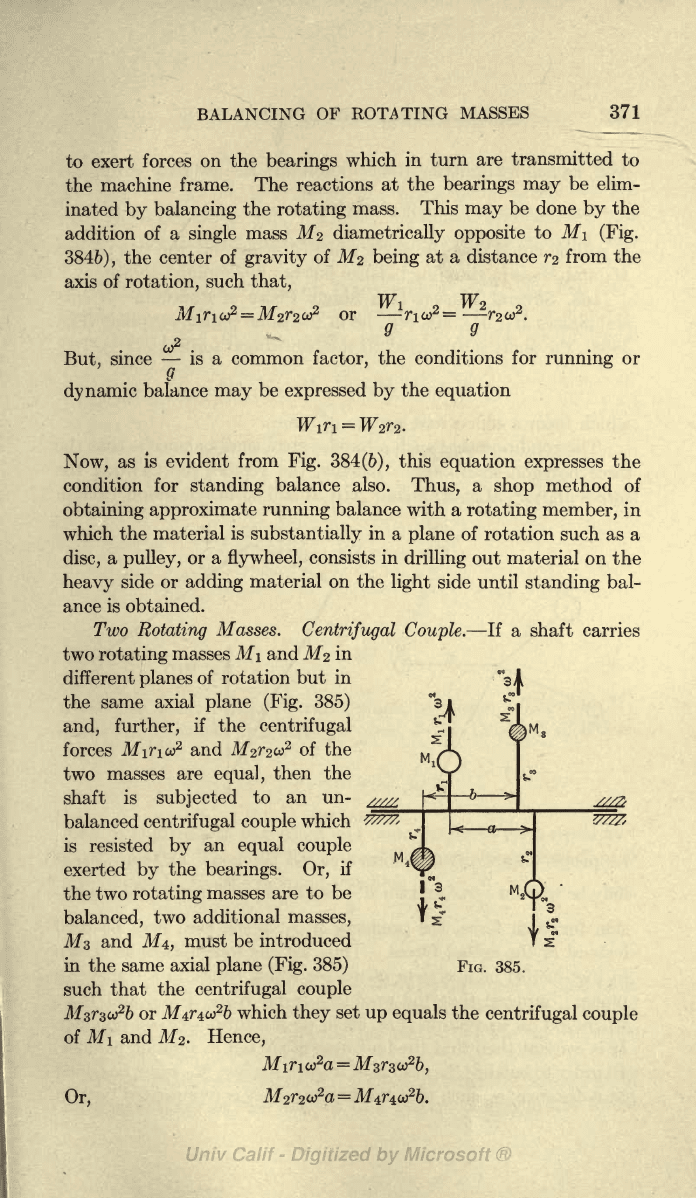
Two
Rotating
Masses.
Centrifugal
Couple.-
two
rotating
masses
MI
and
M
2
in
different
planes
of
rotation but
in
the
same axial
plane (Fig.
385)
and, further,
if the
centrifugal
forces
Miriu
2
and
M
2
r
2
u>
2
of the
two
masses are
equal,
then
the
shaft
is
subjected
to an
un-
balanced
centrifugal couple
which
is
resisted
by
an
equal
couple
exerted
by
the
bearings.
Or,
if
the
two
rotating
masses
are to be
balanced,
two
additional
masses,
M
3
and
M,
must be
introduced
in
the
same
axial
plane (Fig.
385)
such that
the
centrifugal couple
Msraco
2
^ or
M^r^b
which
they
set
up
equals
the
centrifugal couple
of
MI
and
M
2
.
Hence,
Or,
FIG.
385.
M
2
r
2
a>
2
a
372
FORCE,
MASS,
AND
ACCELERATION
o
And,
as
before, omitting
the
common factor
we
may
write,
t/
Wiria
=
Wznb,
etc.
It will
be
noted
that the
shaft
when
carrying
only
the two masses
M
i
and
M^.
is
in
standing
balance
but not
in
running
balance.
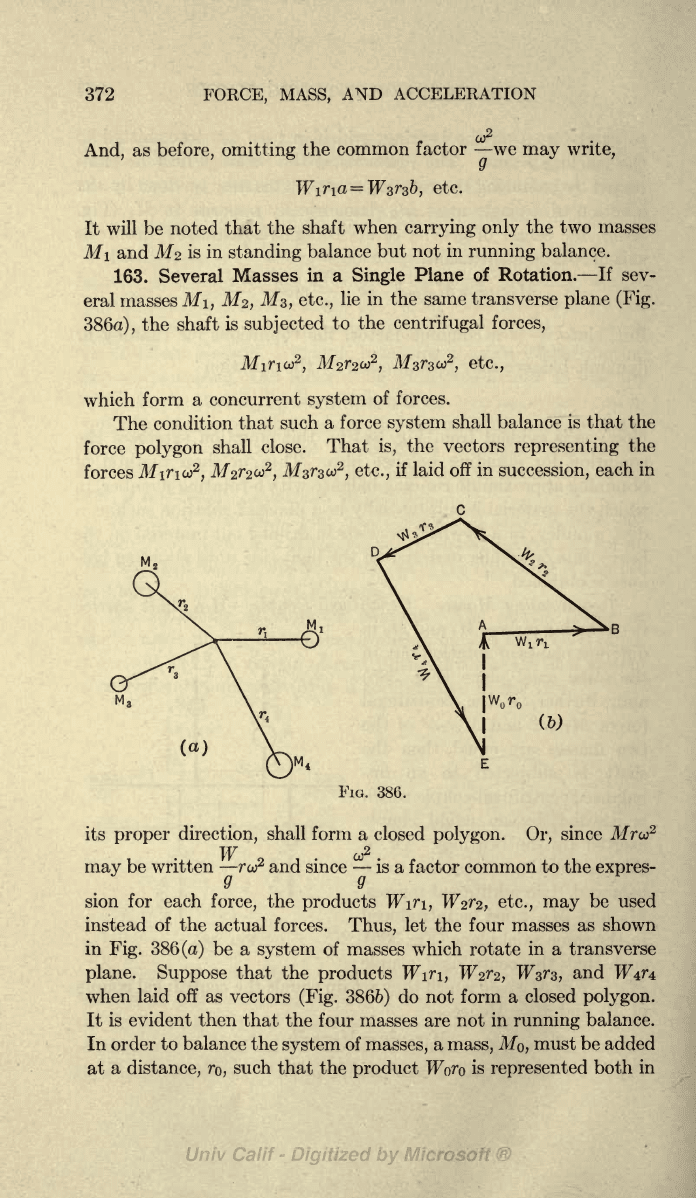
163. Several
Masses
in
a
Single
Plane
of Rotation.
If sev-
eral masses
MI,
M%,
Afa,
etc.,
lie
in
the same
transverse
plane
(Fig.
386a),
the
shaft
is
subjected
to
the
centrifugal
forces,
Mirico
2
,
.M^co
2
,
Tkfsrsco
2
,
etc.,
which
form a
concurrent
system
of forces.
The
condition
that
such a
force
system
shall balance is
that the
force
polygon
shall
close.
That
is,
the vectors
representing
the
,
M
2
r
2
w
2
,
M
3
r
3
co
2
, etc.,
if laid off in
succession,
each
in
its
proper
direction,
shall
form a
closed
polygon.
Or,
since
Mru
2
W
'
CO
2
may
be written
rco
2
and
since is a factor common
to the
expres-
sion
for
each
force,
the
products TFiri,
W2f2,
etc., may
be
used
instead
of
the
actual forces.
Thus,
let
the
four masses
as shown
in
Fig.
386
(a)
be a
system
of masses which rotate
in
a transverse
plane.
Suppose
that the
products
Win, Wir<y,,
Wsrs,
and Wr
when
laid off
as
vectors
(Fig.
3866)
do not
form a
closed
polygon.
It
is evident
then
that the four masses are not
in
running
balance.
In order to balance the
system
of
masses,
a
mass,
MQ,
must be added
at
a
distance, ro,
such
that the
product
Woro
is
represented
both
in
MASSES
IN DIFFERENT TRANSVERSE PLANES 373
magnitude
and
direction
by
the
closing side, EA,
of
the vector
polygon. By assuming
a
convenient value
for
TO,
a value of
MQ
may
be found.
The
gap,
EA,
may
be
closed,
however,
by
two
or
more
vectors
from
which
two
or more masses
may
be
found that
will balance the
system.
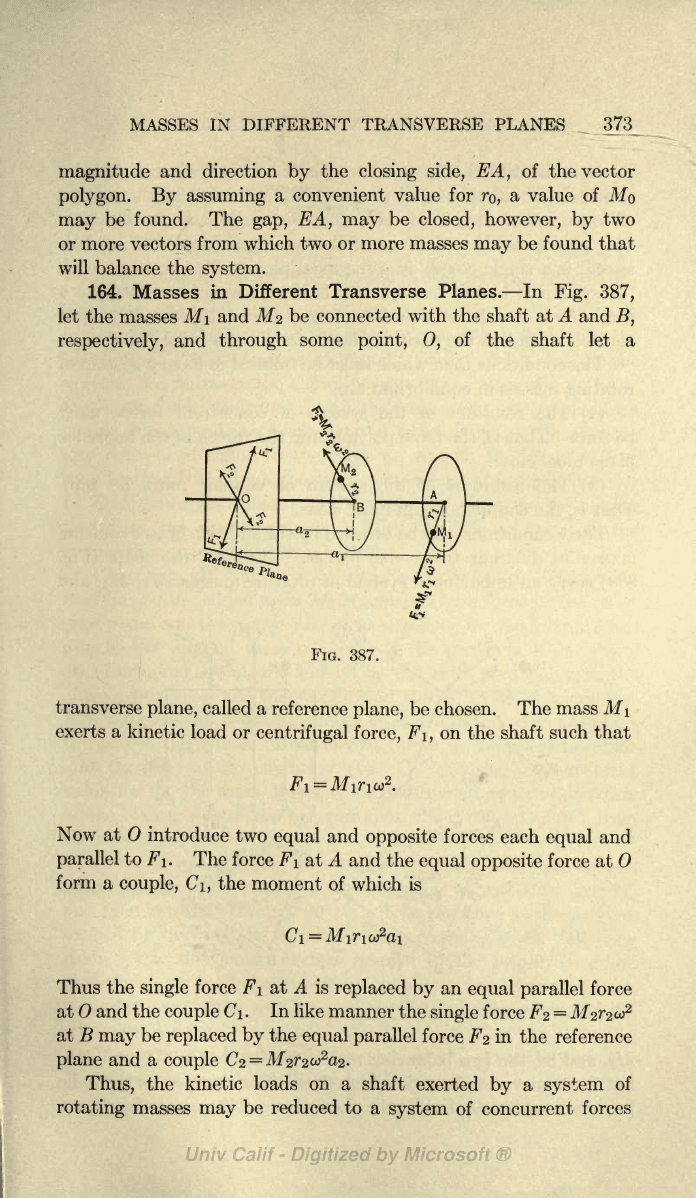
164.
Masses
in Different Transverse
Planes. In
Fig. 387,
let
the
masses
M
i
and
M<z
be connected
with
the
shaft at A
and
B,
respectively,
and
through
some
point,
0,
of
the
shaft let a
FIG.
387.
transverse
plane,
called
a
reference
plane,
be chosen.
The mass
MI
exerts a
kinetic
load
or
centrifugal force, F\,
on
the
shaft
such that
Now at
introduce
two
equal
and
opposite
forces each
equal
and
parallel
to
FI.
The
force
F\
at
A
and
the
equal opposite
force
at
form
a
couple, Ci,
the
moment of
which
is
Thus the
single
force
F\
at
A
is
replaced
by
an
equal parallel
force
at and
the
couple
C\
. In
like manner
the
single
force
%
=
M^r^^
at
B
may
be
replaced
by
the
equal
parallel
force
F%
in
the reference
plane
and a
couple
C
2
=
M
'
^r^a^.
Thus,
the
kinetic loads
on
a
shaft
exerted
by
a
system
of
rotating
masses
may
be reduced to
a
system
of concurrent
forces
374
FORCE,
MASS,
AND
ACCELERATION
in
an
arbitrarily
chosen
reference
plane
and a
system
of
couples
which he
in
different axial
planes.
The
resultant of
the
system
of
concurrent
forces,
if
not
balanced,
is a
single
force
in
the refer-
ence
plane,
and the resultant of the
system
of
couples,
if
not bal-
anced,
is a
single couple
in
some
axial
plane.
Hence,
in
general,
the
system
of kinetic
loads,
if
not
balanced,
may
be reduced
to a
single
force and a
couple.
The
magnitude
of the
couple
will,
of
course, depend
on the
position
chosen
for
the reference
plane.
The
conditions then
which
must be
fulfilled to have a
system
of
rotating
masses
in
equilibrium are,
(1)
The resultant
of
the
system
of
concurrent
forces must
be zero.
That
is,
the force
polygon
for
the forces
in
the reference
plane
must close.
(2)
The resultant
of
the
system
of
couples
must be zero.
That
is,
the
couple
polygon
must close.
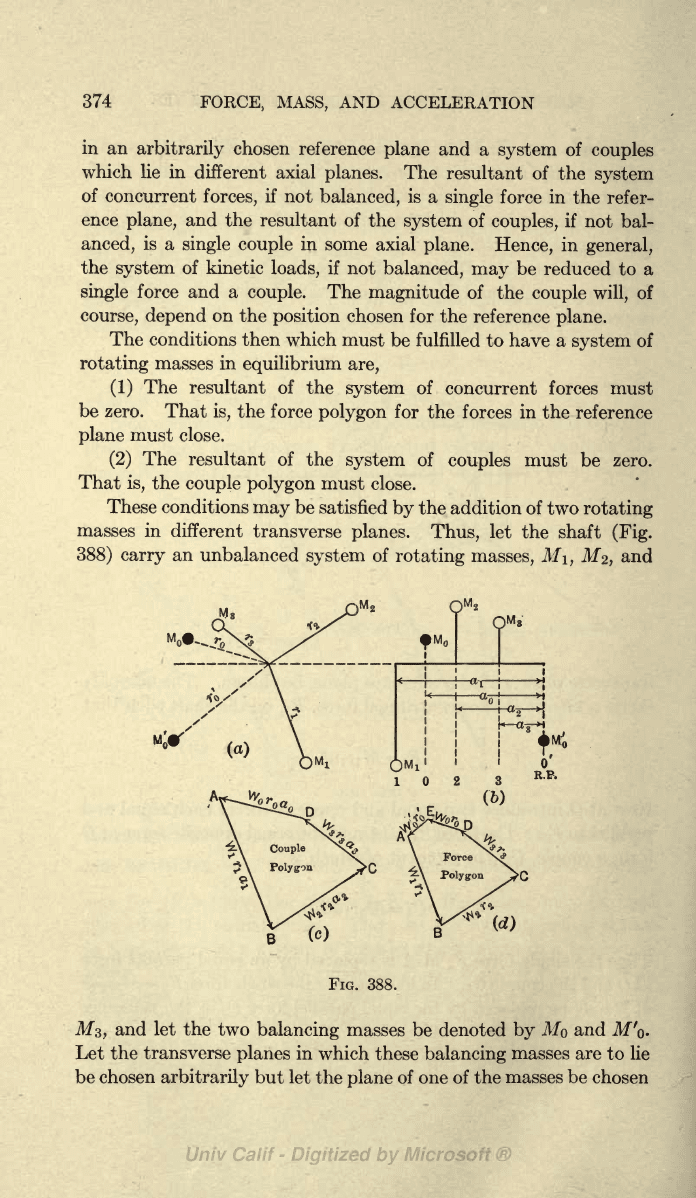
These conditions
may
be satisfied
by
the addition
of
two
rotating
masses in
different
transverse
planes. Thus,
let the shaft
(Fig.
388)
carry
an
unbalanced
system
of
rotating
masses,
MI,
M
2
,
and
:M 2
f)M
2
r
f
FIG.
388.
MS,
and let the
two
balancing
masses be denoted
by
MQ
and
M'Q.
Let the
transverse
planes
in
which these
balancing
masses
are to
lie
be chosen
arbitrarily
but let the
plane
of one of the
masses be
chosen
MASSES
IN
DIFFERENT
TRANSVERSE
PLANES
^
as
the
reference
plane.
The
plane
of
mass
M
'o
will
here be
selected
as
the reference
plane.
Let
OQ, i, &2,
and
as
denote the
respective
distances
of
the
masses
MQ,
MI,
M^
and
MS
from
the
reference
plane.
The
couples
W\r\ai
y Wtfiai,
etc.,
may
now
be
calcu-
O
lated
(the
common
factor
is omitted
in
each
term for
simplicity).
The
only
unknown
couple
is
TFoWo,
since the
couple
is zero
due
to the
fact that the reference
plane
was
chosen as the
plane
of
M'o,
which
makes
a'o
equal
to zero.
By
laying
off
the
vectors
that
represent
the known
couples
as
the sides
of
a
polygon,
the
closing
side
determines both
the
magnitude
of
the
unknown
couple
Woroao
and the
axial
plane
in
which it
lies.
By assigning
any
convenient
value
to the moment
arm
OQ,
the
product
Woro
may
be
found,
and
by
assuming
a
convenient value for
ro,
Wo
may
be determined
and
placed
in
the
plane
indicated
by
the
closing
vector of the
couple
polygon.
Thus,
by
the addition of
the
couple
WoToOo
condition
(2)
is satisfied.
Condition
(1)
may
now be satisfied as
follows: The kinetic
load due to
the added mass
MO
is
replaced
by
a
force
in
the refer-
ence
plane
and the
couple
Moroao
as
was done
for the
kinetic loads
due to the
original
masses.
Now,
if
the
products
W\ri,
Wtfi,
etc.
(including
Woro)
are
laid off as
the sides of a
polygon,
the
closing
side
gives
the
magnitude
and
the direction
of a
product
TP
V'o
for a
body
W'o
which must be
added
in
the
reference
plane
to balance the
system
of concurrent forces in
the
reference
plane
and
thereby satisfy
condition
(1).
By
choosing
a
convenient
value
for
r'o,
the mass
M'o
may
be
determined
and
the
direction
of the
closing
side of the
polygon gives
the
direction
of
M'Q
from
the
axis of the shaft.
If
the
couple polygon
is
formed
by
drawing
the
couple
vectors
perpendicular
to
the
planes
of the
couples,
as
explained
in
Art.
17,
and then
is
turned
through
90,
it will
be
the
same
as
the
polygon
formed
by drawing
the
couple
vectors
according
to
the
following
rule:
Draw the
couple
vectors
parallel
to
the
respective
crank
directions;
outwards for masses on
one
side of
the
reference
plane;
inwards
towards the axis for
masses
on
the
opposite
side of the
reference
plane.
The vectors
of
the force
polygon
are
drawn,
of
course,
from
the
axis
outwards
parallel
to the radii
to
the
masses,
376
FORCE,
MASS,
AND
ACCELERATION
ILLUSTRATIVE
PROBLEM
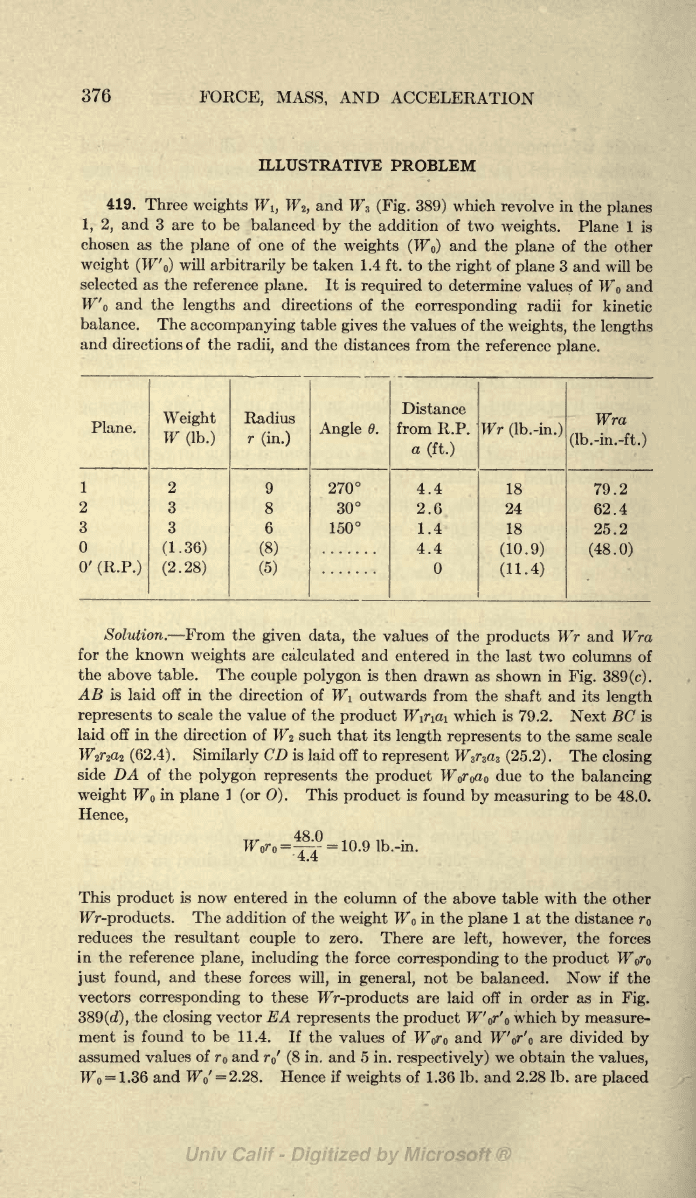
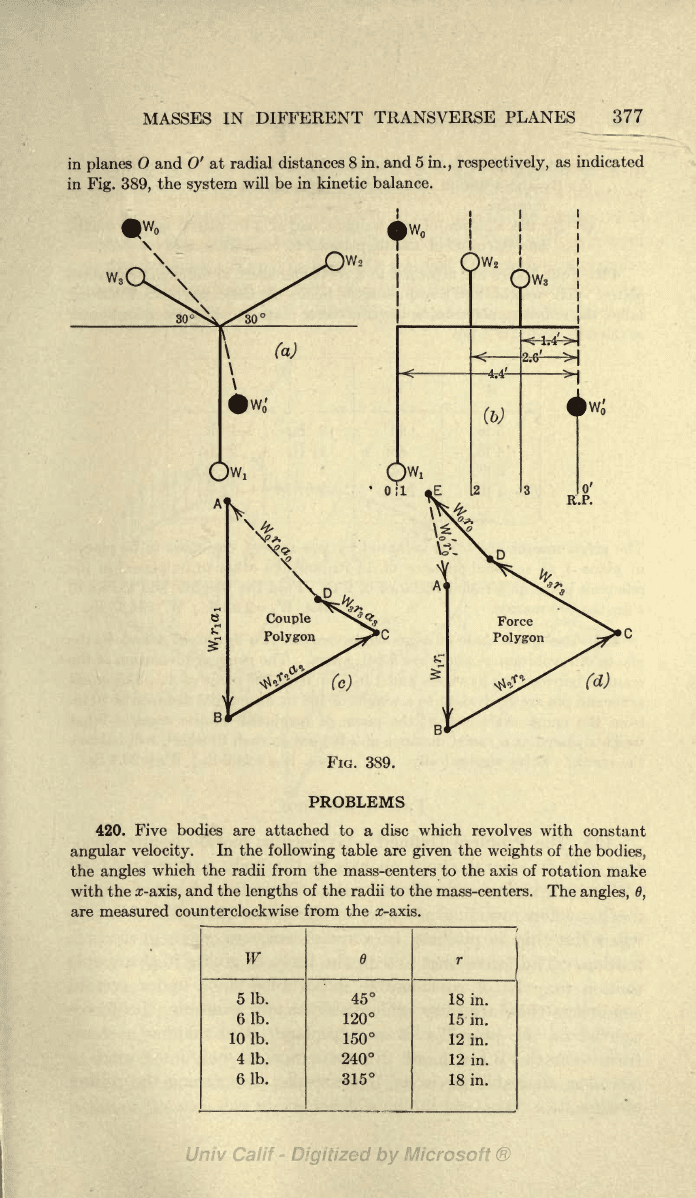
419.
Three
weights
W
1}
W
2
,
and
W
(Fig.
389)
which
revolve in
the
planes
1,
2,
and
3
are
to be
balanced
by
the addition of
two
weights.
Plane 1
is
chosen
as the
plane
of
one of
the
weights (W
)
and
the
plane
of
the
other
weight
(W'o)
will
arbitrarily
be taken
1.4
ft. to the
right
of
plane
3 and will
be
selected
as the
reference
plane.
It is
required
to
determine values
of W
and
W'
Q
and the
lengths
and
directions of
the
corresponding
radii for
kinetic
balance. The
accompanying
table
gives
the
values of the
weights,
the
lengths
and
directions
of
the
radii,
and the
distances
from the
reference
plane.
Plane.
MASSES
IN
DIFFERENT
TRANSVERSE
PLANES 377
in
planes
and
O'
at
radial
distances
8 in.
and 5
in.,
respectively,
as indicated
in
Fig.
389,
the
system
will be
in kinetic
balance.
378
FORCE,
MASS,
AND
ACCELERATION
Determine
sufficient
data for
kinetic
balance of
the
system
of
bodies:
(a)
By
the
addition of
a
single
weight
placed
2
ft.
from
the
axis of
rotation.
(6) By
the addition
of two
weights,
one of 2
Ib.
placed
on
the
?/-axis,
and
the other of
2.25 Ib.
placed
2
ft.
from
the
axis
of
rotation.
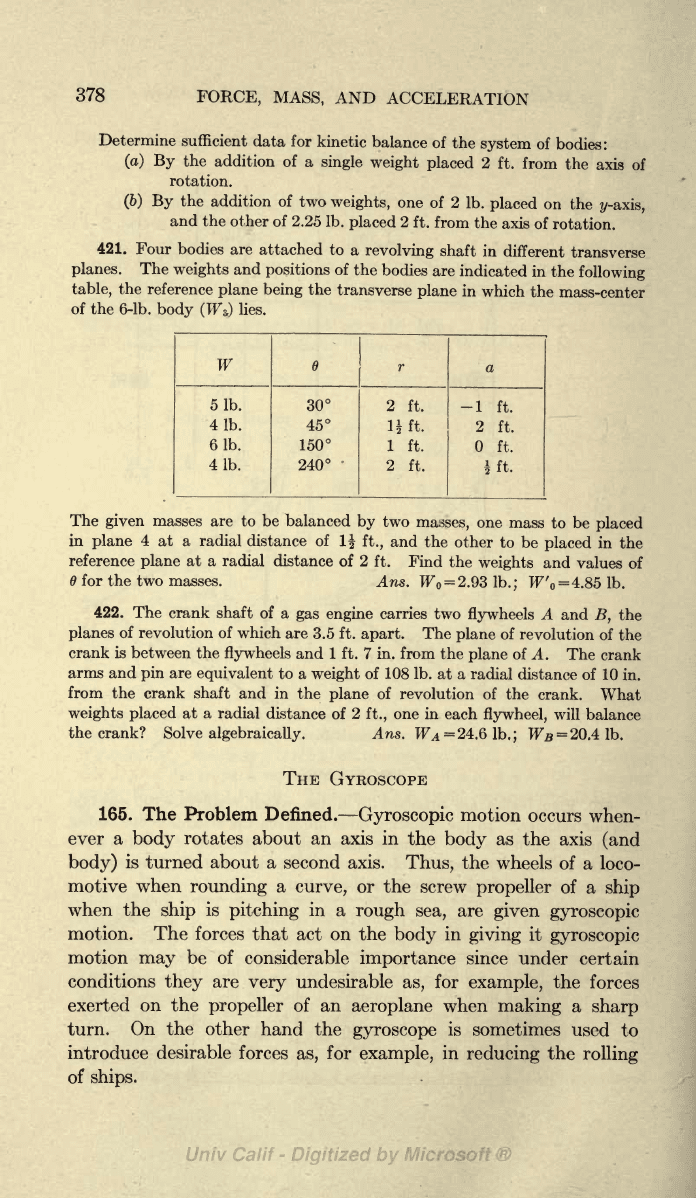
421.
Four bodies
are
attached
to
a
revolving
shaft
in
different
transverse
planes.
The
weights
and
positions
of
the
bodies
are
indicated in
the
following
table,
the
reference
plane being
the
transverse
plane
in
which
the
mass-center
of
the 6-lb.
body
(W
lies.
w
FORCES IN
THE GYROSCOPE
379
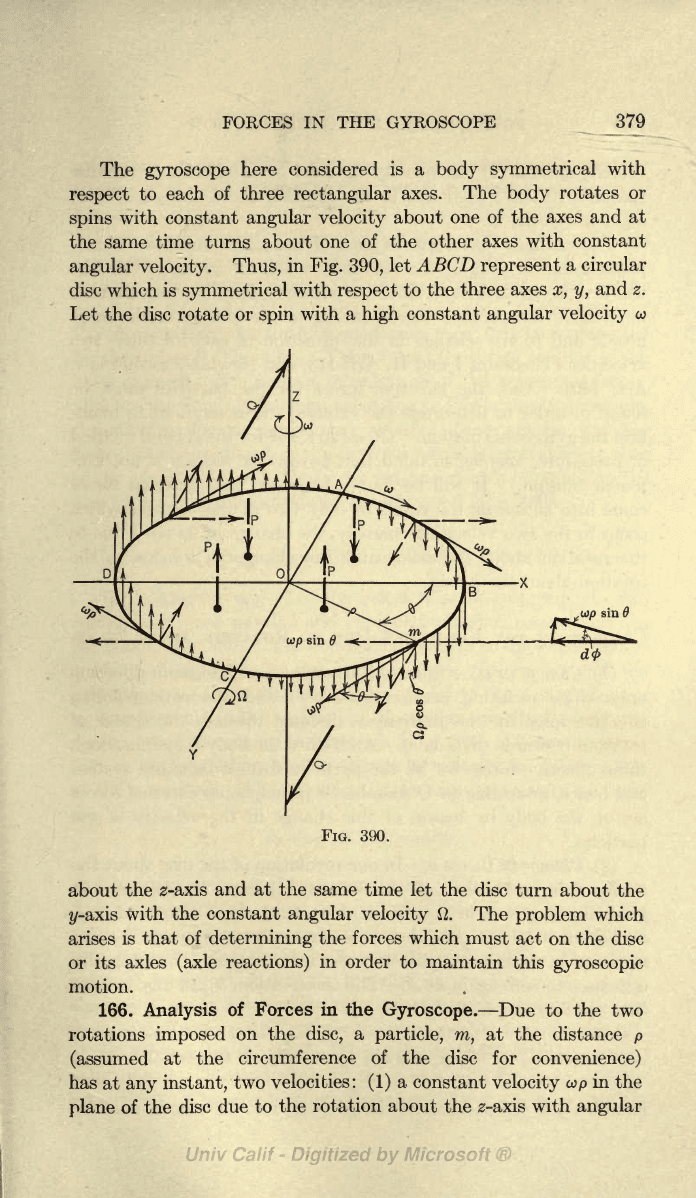
The
gyroscope
here considered
is a
body
symmetrical
with
respect
to
each of
three
rectangular
axes.
The
body
rotates or
spins
with
constant
angular
velocity
about
one
of the
axes
and
at
the same time
turns about
one of
the other
axes with
constant
angular velocity.
Thus,
in
Fig.
390,
let
A
BCD
represent
a circular
disc
which
is
symmetrical
with
respect
to the three
axes
x, y,
and
z.
Let
the disc rotate
or
spin
with
a
high
constant
angular
velocity
co
FIG.
390.
about
the
z-axis
and at the
same time let
the disc turn
about the
y-axis
with
the
constant
angular
velocity
12.
The
problem
which
arises
is that
of
determining
the forces
which
must act on
the disc
or
its
axles
(axle
reactions)
in
order
to maintain
this
gyroscopic
motion.
166.
Analysis
of Forces
in the
Gyroscope.
Due to
the
two
rotations
imposed
on
the
disc,
a
particle, m,
at the distance
p
(assumed
at
the
circumference
of
the
disc for
convenience)
has
at
any
instant,
two
velocities:
(1)
a
constant
velocity
wp
in
the
plane
of
the
disc
due
to
the rotation about
the
z-axis with
angular
380
FORCE, MASS,
AND
ACCELERATION
velocity co,
and
(2)
the
velocity
ftp
cos
6
perpendicular
to
the
disc
(parallel
to the
z-axis)
due to the
rotation
about the
2/-axis
with
angular
velocity
ft.
The
changes
that occur
in
each
of
these two
velocities of
any
particle
due to each of
the rotations
which
are
given
to
the disc
will
first
be
investigated,
since the
effective force for
any particle
must
have
components
corresponding
to the
change
in
the
mag-
nitude
and to the
change
in
the
direction of each of
these
two
velocities
(Theorems
I
and
II,
Art.
118,
and Newton's
second
law,
Art.
140).
And,
the
effective forces for
the
particles
must
be
found in
order to
determine
the external
forces
required
to main-
tain
the
gyroscopic
motion.
(Read
Art.
144
for the
general
method
of
procedure,
keeping
in
mind that
gyroscopic
motion
is
not
uni-
planar
motion.)
It
will
be
found,
however,
that
external
forces
come into action
as the
result of
only
two
of
the
changes
which
occur in
the two
velocities;
namely,
the
change
in
ftp
cos 6
due
to
the rotation
about the
z-axis
and the
change
in
cop
due to
the
rotation
about the
i/-axis.
CHANGES IN
THE
VELOCITIES DUE TO
ROTATION
ABOUT
Z-AXIS
(1)
Change
in
cop.
Since co is
constant,
cop
changes
in
direction
only.
The
resulting
acceleration
(co
2
p)
and the
corresponding
effective
force
for
the
particle,
is
directed
towards
the
center of
rotation
(towards
the
z-axis).
And,
since the
body
is
symmetrical,
these
effective forces for
all the
particles
form a
balanced
system
and
hence,
according
to
D'Alemberfc's
principle,
no
external
forces
act on
the
body by
reason of
this
change
in
the
velocity
of the
particles.
(2)
Change
in
ftp
cos
6. In
one
revolution of the
disc
about
the
z-axis,
this
component
of
the
velocity
changes,
as
follows: It
gradually
increases
in
magnitude
downwards from
zero
at
A
to a
maximum
at
B;
it then
decreases
gradually
to zero at
C;
then
increases
in
the
opposite
direction to a
maximum
at
D
;
and
finally
decreases to
zero
again
at
A.
The
acceleration,
a\
t
at
any
instant
then
is
(Theorem
I,
Art.
118),
d(ftp
cos
0)
.
-dB
ai=
-r
=
ftp
sin
Q-j-
=
ftp
sin 0co
=
cofti/,
in
which
y
is the
distance of the
particle
from the
z-axis,
and
the