Sandau R. Digital Airborne Camera: Introduction and Technology
Подождите немного. Документ загружается.

2.10 Sensor Orientation 111
the image geometry. We may have a radial symmetric distortion and also tangen-
tial distortion caused by lenses that are not centric. The imaging system may be
influenced by air pressure, temperature changes and temperature gradients within
the optics. Analogue cameras in particular have different conditions for each photo
flight. The systematic deviation of the real image geometry from the perspective
model is named systematic image error, even if it is caused by an imprecise math-
ematical model. Such systematic image errors can be estimated, at least partially,
from bundle adjustment with self-calibration by additional parameters. By a com-
bination of additional parameters nearly any type of deviation from the perspective
model, except local ones, can be adjusted based on over-determination of the block
adjustment.
Different sets of additional parameters are in use. The Ebner parameters
(Gotthard, 1975) are based on systematic image errors in a grid of nine points by
polynomials. This leads to the following set of formulae:
x = P1 ·y
+P2 ·x
·y
+P3 ·y
2
+P4 ·x
2
·y
+P5 ·x
·y
2
y = P6 · y
+P7 ·x
2
+P8 ·x
·y
+P9 ·x
2
·y
+P10 ·x
·y
2
(2.10-6)
Pn are the unknown coefficients of the additional parameters. A similar parameter
set for a grid of 25 image points has been developed by Grün (1978). Such poly-
nomials are not easy to analyse. For example, the often dominant radial symmetric
distortion has to be compensated by a group of parameters. Furthermore, the param-
eters are correlated if the image points are not exactly located at the raster positions
used for the formulae. Jacobsen (1982) developed a set of parameters describing
the most important physical influences directly. This set also requires s ome general
parameters, to compensate effects not covered by the physically justified ones:
x = P1 · y
+P2 ·x
+P3 ·x
·cos 2β + P4 · x
·sin 2β + P5 · x
·cos β
+P6 · x ·sin β − P7 · y
·r · cos β −P8 ·y
·r · sin β +P9 · x
(r −C1)
+P10 · x
·sin (r ·C2) + P11 · x
·sin (r ·C3) + P12 · x
·sin 4β
y = P1 · x
−P2 ·y
+P3 ·y
·cos 2β + P4 ·y
sin 2β +P5 ·y
·cos β
+P6 · y · sin β −P7 ·x
·r · cos β −P8 ·x
·r · sin β +P9 · y
(r −C1)
+P10 · y
·sin (r ·C2) + P11 · y
·sin (r ·C3) + P12 · y
·sin 4β
(2.10-7)
β describes the angle of the image vector with respect to the x
-axis. C1 − C3
are constant values depending upon the sensor size. P1 expresses the angular affin-
ity, P2 the affine deformation, P7 and P8 the tangential distortion, and P9–P11
the radial symmetric distortion. Both sets of additional parameters can be used for
area sensors, but must be changed for line sensors, which require different addi-
tional parameters. The most important parameter for the radial symmetric distortion
is based on the third power of the image radius. For line sensors it is reduced to:
112 2 Foundations and Definitions
x = P9 ·
(x
−C)
3
. The constant value C describes the zero crossing of the
distortion, which is required to avoid a correlation with the focal length. The param-
eter P1 in (2.10-7) describes the deviation of the line with respect to the direction
perpendicular to the flight direction, while P2 in (2.10-7) is a scale factor for speed
and time. It is also possible to include special parameters for images based on a con-
nection of sub-scenes (Jacobsen, 1998) or other special geometric sensor problems.
An alternative set of physically justified parameters has been developed by Brown
(1971) for close-range images.
Self-calibration with additional parameters leads to considerable improvements
of the image orientation and takes into consideration the real sensor geometry.
Digital sensors have more stable inner geometry than film sensors, making a sys-
tem calibration over a test field simpler and allowing the use of calibration results
for a priori improvement of other blocks.
2.10.1.3 Indirect Georeferencing
Traditionally the image orientation of area sensors is determined indirectly. Using
ground control points (points with known object and image coordinates), sensor
orientation is computed by resection for single images and by bundle block adjust-
ment for more than one image. The mathematical model is perspective geometry
represented by the collinearity equation. For the 6 unknowns of a single image
(X
0
,Y
0
, Z
0
,ω,φ,κ) at least 3 control points are required – x’ and y’ of 3 image points
provide 6 observations, the required minimum for 6 unknowns. Usually we have a
block of images with endlap of 60% and sufficient sidelap, in which case the images
can be connected by tie points (object points with corresponding image coordinates
in at least 2 images). So by bundle block adjustment the image orientations and the
object coordinates of tie points can be estimated based on a minimum of ground
control points. To achieve an orientation accuracy of the same order as for single
models (combination of 2 images with at least 60% overlap), full control points
(with X, Y and Z object coordinates) are required in the boundary area of the block
spaced at every 4–6 base lengths. The base length b is the distance between two
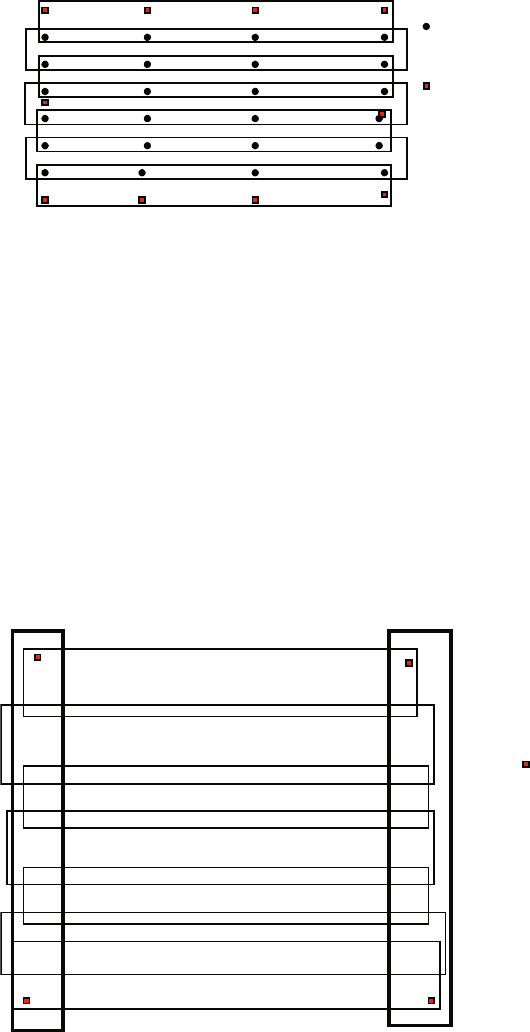
neighbouring projection centres in the same flight line. Additional vertical control
points (with known Z coordinates only) are required in sidelap areas approximately
every 4 base lengths (Fig. 2.10-4). A larger spacing between control points leads to
a lower absolute accuracy, but does not influence the relative accuracy.
An insufficiency and/or unfavourable distribution of vertical control points may
cause instability in the geometry of the block. Traditional bundle block adjustment
with ground control points is operational, but the determination of ground control
points, including the manual measurement of their locations in the images, is time
consuming. For this reason additional observations have made for a considerable
time in order to reduce the number of ground control points. But only with the
advent of relative kinematic GPS positioning did this become operational. The rel-
ative positions of the projection centre coordinates can be determined by GNSS,
usually as a GPS solution, with higher accuracy, allowing a drastic reduction in the
2.10 Sensor Orientation 113
vertical control point
full ground control point
← 4-
6b →
← ∼ 4 b →
Fig. 2.10-4 Required control point distribution for a usual block with 60% endlap and 20–40%
sidelap
number of control points required. The hybrid method of combined adjustment uses
GPS coordinates of the projection centres as additional observations to the image
coordinates and the few required ground control points.
Kinematic GPS positioning may be influenced by ambiguity problems, causing
systematic positional errors, mainly shifts, and sometimes also time-dependent drift
problems. These systematic errors may be different for the individual flight lines,
caused by cycle slips during the turn from one flight line to the next. Additional
shifts, and sometimes also drift parameters, have to be added to the combined
block adjustment, requiring additional crossing flight lines, called cross strips
(Fig. 2.10-5), or lines of control points at the ends of the flight lines. With cross
strips, control points are required only in the corners of the block if the length of
full ground
control point
Fig. 2.10-5 Required number and distribution of control points for combined block adjustment
with GPS coordinates of the projection centres, supported by crossing flight lines (cross strips)
114 2 Foundations and Definitions
the flight lines does not exceed 30 images. Of course, under operational conditions
and for reasons of reliability, double control points (located close together), rather
than single control points, should be used in the corners. For very long flight lines
control points every 30 base lengths are required at the block boundaries. With such
a configuration the cost of control point determination is minimized.
2.10.1.4 Orientation of Line-Scanner Images
Each perspective image has a unique geometry for the whole area it covers, whereas
line scanners have a different exterior orientation for every line. But the exterior ori-
entation does not change suddenly: it changes continuously and is differentiable. In
the extreme case of satellite images, we have no change of the attitudes in relation-
ship to the orbit. For aerial applications, neighbouring lines at least can be grouped
together, allowing a functional model for the change of the orientation parameters.
If the sensor orientation is determined by a combination of kinematic GPS posi-
tioning with inertial data, the exterior orientation for any line is given and in theory
no block adjustment is required. If stereo line-scanner images are used for manual
measurement, y-parallaxes may be present, disturbing the stereoscopic impression
(Gervaix, 2002). This problem can be solved by aerial triangulation of line-scanner
images.
Line-scanner images can also be oriented by means of bundle adjustment. Of
course it is not possible to determine the orientation of each line separately; they
have to be joined together in groups, requiring a functional model of the change of
the orientation. The orientation of the group centre line will be computed. These
centre lines are named orientation fixes (Müller, 1991). The adjustment of the line-
scanner images is different to the adjustment of perspective area images since the
effect of the roll and pitch angles with respect to the ground coordinate system is
different. The effect of approximations is negligible if they are determined by the
combination of GPS with inertial data and only a small improvement, especially for
the elimination of the y-parallaxes, is achieved. Two- and three-line sensors such as
the ADS40 or the HRSC enhance the stability of the orientation since the exterior
orientation is basically the same for all lines taken at the same instant.
Based on the orientation fixes, the exterior orientation of line-scanner images
can be determined by a modified bundle solution with tie and control points. The
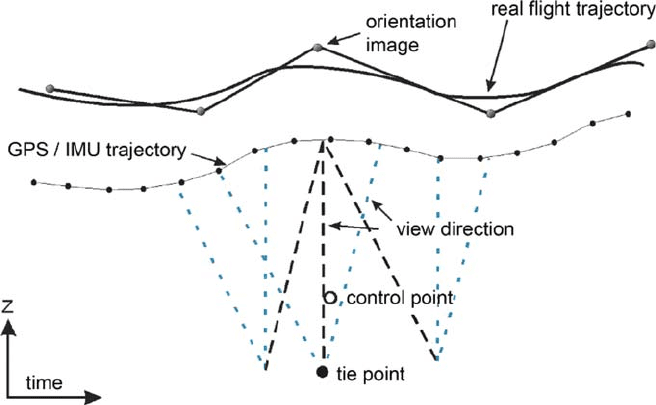
geometric relationship shown in Fig. 2.10-6 is valid for all orientation parame-
ters with the exception of the different view directions. Without control points the
datum (shift in X, Y, Z) and drift cannot be computed and the bundle block adjust-
ment is limited to a relative improvement, reducing the y-parallaxes and facilitating
manual, stereoscopic data acquisition with line-scanner images. Only a few appli-
cations require an absolute improvement of the orientation from combined GPS and
inertial data. Of course, control points are required if no GPS and inertial data are
available. In theory image orientation from three-line-scanners can be determined,
without additional orientation information, with an accuracy similar to perspective
area images. For single-line-scanner images, only approximations depending upon
2.10 Sensor Orientation 115
Fig. 2.10-6 Geometric situation for line- scanner bundle orientation
the changes of the exterior orientation can be computed. For ADS40 scenes gener-
ated by combined adjustment of the GPS and inertial information together with tie
and control points, an object point accuracy can be reached in the range of one to
two thirds of ground sampling distance for the horizontal component and around the
ground sampling distance for the vertical component.
2.10.1.5 Direct Georeferencing
The trend in photogrammetric data acquisition from classical topographic mapping
to applications that are close to online requires a faster and more efficient orien-
tation process. Indirect georeferencing of sensor data has some limits for close
to online applications. The orientation process is a bottleneck in the whole pro-
cess chain, since it has to be completed before the next step can ensue. For time
critical applications, therefore, the time required for the indirect orientation is unac-
ceptable. Furthermore, for block adjustment a more or less regular location of the
images with sufficient overlap is required, causing problems for small and irregular
projects, especially if gaps between images cannot be avoided. Traditional orienta-
tion, moreover, cannot be used unchanged for non-imaging systems and new sensor
types such as line scanner, laser scanner or synthetic aperture radar. Such systems
require a direct determination of all orientation elements. An integrated system for
the determination of positions and attitudes is available with the combination of
GNSS and inertial sensors. This separates the orientation process from the data cap-
ture and enables the determination of the orientation elements for any instant. The
computation of the orientation based on GNSS and inertial systems is potentially
faster than the process of indirect georeferencing with control points. In addition,

116 2 Foundations and Definitions
no special block configuration is required, the procedure can be used for any type of
sensor and isolated areas can be covered.
2.10.2 Brief Review of GVP Concepts GPS
The NAVSTAR Global Positioning System (GPS) was originally developed by the
US Department of Defense as a worldwide satellite-based radio navigation system
for dual-use: to enhance the effectiveness of military forces and – rapidly growing –
for civilian applications. It is made up of a network of GPS satellites continuously
orbiting the Earth. The satellite receivers of all users define the user segment of the
system. Each receiver picks up the signals from the GPS satellites and processes the
results to determine three-dimensional information on current position, velocity and
(when using special multi-antenna GPS receivers or a set-up of several receivers)
attitude. All this is obtained with high absolute and consistent accuracy, anywhere
in the world,
1
day and night, in any weather conditions.
The completely installed GPS space segment, which has been fully operational
since July 1995, consists of 24 active satellites in six different orbit planes, with four
satellites in each. The actual number of satellites is variable, depending on the status
of individual systems. The radius of the almost circular orbits is about 26,500 km
from the centre of the Earth. The inclination of each orbit plane is 55
◦
. With a
revolution time of 12 h (sideral time) and the above inclination, between 6 and
11 satellites with an elevation angle above 5
◦
are typically visible and can be used
for navigation on Earth. Nonetheless, the system providers guarantee the availabil-
ity of only four satellites. The GPS satellites continuously transmit two low-power
radio signals in the L-band. These carrier frequencies are L1, 1,575.42 MHz, and
L2, 1,227.60 MHz. The frequencies are obtained as multiples of the fundamental
GPS clock rate of 10.23 MHz. Two different binary codes are superimposed on
the carrier, the less accurate C/A-code (on L1 band) and the precise P-code (L1
and L2 bands). The Y-code is used in place of the P-code whenever the antispoof-
ing (A/S) mode is activated. This prevents unauthorized users from accessing the
P/Y-code signal. In addition to A/S, so-called selective availability (S/A) is used by
the US Department of Defense to degrade real-time GPS navigation performance.
S/A is accomplished by manipulating the satellite message orbit data and/or the
GPS fundamental clock frequency (dither). The GPS clocks are overlaid with short-
and long-term modulations. This S/A signal degradation was stopped on May 1,
2000. The broadcast message, including information on the satellites’ health and
ephemerises, is modulated on the carrier waves as well.
The basic GPS observation types are pseudo ranges and carrier phase mea-
surements. The corresponding observation equations are well known and given in
(2.10-8) and (2.10-9), following, for example, Hofmann-Wellenhof et al. (2001) and
Wells (1987):
1
Due to the satellites’ inclination, problems with satellite coverage can occur in the polar regions
of the Earth.
2.10 Sensor Orientation 117
p
S
R
= ρ
S
R
+c ·(dt −dT) +d
ρ
+d
ion
+d
trop
+ε
p
(2.10-8)
S
R
= ρ
S
R
+c ·(dt −dT) +λN +d
ρ
+d
ion
+d
trop
+ε
(2.10-9)
The distance p
S
R
from the receiver R to the satellite S is obtained from the mea-
surement of the transmission time of code signals. It is calculated from the product
p
S
R
= c · (t
R
i
− T
S
i
) , computed from the speed of light c, the satellite clock T
S
i
and
the receiver clock t
R
i
. As can be seen from this equation, the difference between the
receiver time (receiving of signal) and satellite time (sending of signal) is essential
for the determination of the travel distance. Both clocks (mainly the receiver clock)
are influenced by errors and the travel time of the signal is not truly identical with the
speed of light in a vacuum. Thus the obtained distance p
S
R
is called pseudo range. In
order to compensate for these clock errors one additional observation is necessary.
In summary four simultaneous pseudo range observations are necessary to solve for
the three-dimensional position of the user including the one additional receiver clock
offset. This so-called single receiver approach or navigation solution is mainly used
in real-time absolute positioning, where less accurate positions are accepted. The
positional degradation is due to uncompensated modelling errors in satellite posi-
tion d
ρ
, ionosphere and troposphere d
ion,
d
trop
and satellite and receiver clocks dt,
dT. In order to achieve better accuracy, these error sources have to be modelled cor-
rectly. Alternatively, differential approaches for the processing of observations are
possible, whereby the error sources mentioned above are reduced or even eliminated
significantly.
The second main observation besides pseudo range is the so called carrier phase
observation. This observation is obtained from the phase shift between received
satellite signal and the reference signal generated by the receiver. In practice, the
continuous carrier phase measurement consists of a measured fractional phase part,
an integer count of numbers of full cycles measured by the receiver from the initial
to the current epoch, and finally an unknown integer number of cycles at the first
measurement epoch. The unambiguous measurement of signal phase is only possi-
ble within one cycle of the wavelength (L1: λ
1
= 19.05 cm, L2: λ
2
= 24.45 cm).
This fraction of a cycle is measured with an accuracy of about 1–2 mm. The inte-
ger number of full cycles N between receiver and satellite at the initial epoch is
initially unknown and is named phase ambiguity or simply ambiguity. It is differ-
ent for each of the observed satellites but remains constant as long as the receiver
maintains continuous lock of signals throughout the whole measurement interval,
i.e. as long as no signal loss of lock or cycle slip occurs. As already discussed for
the pseudo range observations, different error sources affect the quality of phase
observations and have to be modelled or alternatively corrected by using differ-
ential processing approaches. Again, this will effectively increase the accuracy in
positioning. The correct determination of phase ambiguities is essential for the
final accuracy of positions based on phase observations. Different approaches to
solve for the correct ambiguities are available, which are outside the scope of this
publication. The estimation of ambiguities during motion has a large impact on
kinematic applications. If a so-called on the fly (OTF) algorithm is applied, static
118 2 Foundations and Definitions
initialisation periods before the survey become redundant. Static initialisation was
formerly necessary to solve for the correct ambiguity numbers. With the avail-
ability of OTF algorithms, kinematic GPS surveys are performed in a much more
efficient way.
As already mentioned, the use of differential GPS techniques (DGPS), i.e. the
step from absolute to relative positioning, increases the accuracy even without exact
modelling of the observational errors. This is based on the fact that errors are of
similar size and influence on two neighbouring GPS stations. Through linear combi-
nations of the observations at both receiver stations, the effect of unmodelled errors
can be almost eliminated. Nevertheless, two prerequisites have to be fulfilled: one
of the two receivers must be installed on a point with known coordinates (so-called
reference receiver); and this receiver and the other (so-called rover) receiver must
observe simultaneously. With the known position of the reference receiver, the effect
of unmodelled errors is estimated from the difference between the results derived
from the GPS observations and the known coordinates. The differences are then
used to correct for the remaining modelling errors at the rover. Now the roving sta-
tion is positioned relative to the reference station, and not absolutely, as was the case
for the earlier single point solution.
Within differential GPS approaches, no raw pseudo range or phase observations
are processed. The concepts are based on the use of linear combinations of the orig-
inal fundamental L1 and L2 observations. Such combinations are possible between
satellites, between receivers and between epochs. Depending on the number of dif-
ferences formed, one has to distinguish between single and multiple differences. For
a pair of stations (rover and reference station) simultaneously observing the same
satellite, the between-receivers single difference is obtained. This difference elimi-
nates the influence of satellite clock errors dt and removes to a great extent the effect
of orbit errors and atmospheric effects, but only if the baseline distance between both
receivers is sufficiently short. The receiver satellite double difference, i.e. the differ-
ence of two single differences with two different satellites, additionally eliminates
the receiver clock error dT. However, some terms remain within the observation
equations describing minor and uneliminated effects of atmosphere. The influence
of these effects is dependent on the effective baseline length between the two
receivers. Assuming identical atmospheric conditions at both receiver stations, all
atmospheric effects will be cancelled. The double-differenced phase observation is
the main observation for high accuracy GPS applications.
Relative GPS positioning relies on the availability of a certain number of ref-
erence stations. In the ideal case, these stations should be part of a permanent
network built up from reference stations almost evenly distributed in a certain
area. The data from GPS reference stations is then used for the differential cor-
rection of the individual rover stations. For example, the Working Committee
of the Surveying Authorities of the States of the Federal Republic of Germany
(Arbeitsgemeinschaft deutscher Vermessungsverwaltungen) has installed an area-
wide, stationary permanent GPS reference station network, which covers the
whole of Germany. This service is called SAPOS [Satellite positioning service
2.10 Sensor Orientation 119
of German Land Survey (SAPOS, 2004)]. The permanent stations continuously
provide differential corrections, which are transferred to the users via real-time
radio communication or data transfer f or later post-processing. As mentioned above,
the accuracy of differential corrections is dependent on the baseline length, i.e. the
distance to the roving station to be positioned. In order to minimize these distance-
dependent effects, a set of several permanent reference stations can be used to form
a combined differential correction which is optimized for the rover station itself.
Such approaches, relying on multiple reference stations to obtain optimal differ-
ential corrections are named virtual reference station or area-weighted correction
polynomials. This enables positioning accuracy within the cm range even for base-
line lengths >30 km. Similar permanent network station concepts are available in
many other countries.
In addition to such land-based permanent networks, satellite-based correction
services are available and in use. Within so called satellite-based augmentation
systems (SBAS), GPS differential corrections are provided to the users on Earth
via satellite. Based on a network of monitor stations, the signals of GPS satellites
are permanently monitored and analysed. From this, corrections on orbit and clock
errors and the influence of ionosphere are obtained. These corrections are uploaded
to geostationary satellites, which then transmit this information to the users. Since
the transmitted correction signal is of a similar structure to the original GPS signals,
the geostationary satellites may also serve as additional GPS satellites. Currently
three different SBAS systems are in use or under development. The WAAS wide
area augmentation system for North America, the European geostationary navi-
gation overlay system EGNOS, its European counterpart, and the multi-functional
satellite augmentation system MSAS, which is designed mainly for the use in Japan
and the rest of Asia. Since all these satellite-based augmentation systems provide
their information in a form compatible with the GPS signals, no additional radio
receiver equipment is necessary to use this service.
The accuracy of GPS positioning is dependent mainly on the processed
GPS observation type (pseudo range or phase observation) and the data pro-
cessing concept (absolute/differential, static/kinematic, real-time/post-processing).
Furthermore, the individual measurement set-up (baseline length for differential
processing) and the satellite configuration influence the positioning accuracy. This
includes multipath, receiver noise and variations of the antenna phase centre. In
land-based and airborne applications, cycle slips and signal loss of lock are possible
due to shading effects caused by buildings or the aircraft’s wings during turns. All
this has to be considered when GPS accuracy is discussed. Nevertheless, the accu-
racy numbers in Table 2.10-1 have to be construed to be for guidance only, and may
be different for individual measurement scenarios.
Thus far the explanation of global navigation satellite systems (GNSS) has cov-
ered only the US NAVSTAR GPS. Besides this, two alternative GNSS are already
available or in installation. The first one is the Russian GLONASS, which became
fully operational at the end of the 1990s. Its positioning accuracy is comparable
to GPS without S/A. In principle GLONASS and GPS are quite similar, but some
120 2 Foundations and Definitions
Table 2.10-1 Accuracy in GPS positioning
GPS observations and processing approach Accuracy
Single point GPS positioning/absolute positioning
Positioning accuracy C/A-Code (with S/A)
Positioning accuracy C/A-Code (no S/A)
Positioning accuracy Y-Code (military)
100 m
10 m
4m
Differential GPS/relative positioning
Positioning accuracy pseudo range observation
Positioning accuracy carrier phase observation
1–5 m
50 cm
differences are significant: most noticeable is that GLONASS has neither the degra-
dation of precision nor the encryption of GPS. The accuracy and availability of
GLONASS have declined due to lack of maintenance in the past. Nevertheless,
modernisation and replacement of failing satellites by next-generation GLONASS
satellites with longer life expectancies are in progress. So far, GLONASS has not
become accepted by civilian users, but after the modernisation process it should
also be offered as a commercial system. The main goal of Russian policy is to
make GLONASS performance comparable to GPS by 2010 and to bring it to the
mass-market.
The other GNSS is the European Galileo system, which is currently in its final
installation phase. While the Russian GLONASS was originally designed mainly as
a military system, similarly to GPS, the Galileo system is intended as a civilian sys-
tem under the leadership of the European Union EU and the European Space Agency
ESA. Thus the system is not under military control, which guarantees functionality
and accessibility independent of any military activities. Furthermore, Galileo offers
an additional integrity signal which provides information on the actual positioning
accuracy to the user. In principle the technical design of Galileo is very similar to
GPS. Nevertheless, owing to the use of a higher number of satellites (30 satellites
nominally in three different orbits with an inclination of 56
◦
) and four carrier waves
for signal propagation, higher positioning accuracies are expected. Until 2005 the
Galileo installation process was in its development and validation phase. The first
prototype Galileo satellite was launched in December 2005 and the launch of the
second was scheduled for early 2007. The system is expected to be able to offer an
operational service from 2008 onwards.
Spurred by the development of the new European Galileo GNSS, major mod-
ernisation and improvements are also planned for the GPS constellation, i.e. a new
civilian signal on L2 carrier wave and a new civil-only signal on a third carrier
wave L5 to be broadcast at 1,176.45 MHz. All this is being done to compete with
Galileo. Nevertheless, if all three GNSS are seen as complementary rather than
competing systems, all this modification and modernisation will finally lead to a
more consistent and accurate combined GNSS with higher integrity, reliability and
accessibility.