Русаков В.С. и др. Механика. Методика решения задач
Подождите немного. Документ загружается.


Глава 1. Кинематика материальной точки и простейших систем
41
Ответ: N
u
N
+
=
′
υ
υ
.
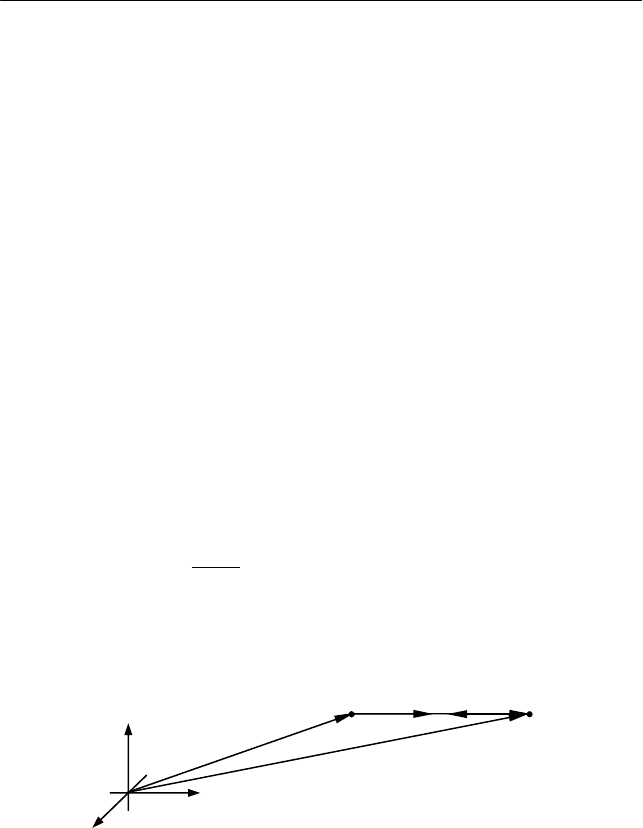
Задача 4
Два трактора, движущиеся со скоростями
1
υ
и
2
υ
, буксируют
с помощью тросов автомобиль (см. рис.).
Определить модуль и направление скорости
υ
автомобиля в
тот момент, когда тросы параллельны векторам
1
υ и
2
υ , а угол ме-
жду ними равен
α
.
Ответ:
α
αυυυυ
υ
sin
cos2
21
2
2
2
1
−+
= ,
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−+
=
αυυυυ
αυ
β
cos2
sin
arccos
21
2
2
2
1
1
1
, где
1
β
– угол между век-
торами
υ и
1
υ .
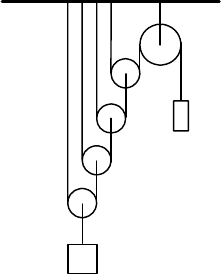
Задача 5
Тело А подвешено на нитях, перекинутых через блоки В и С
малого диаметра так, что АВ = ВС (см. рис.).
Концы нитей тянут с одинаковыми скоростями
υ
. Расстоя-
ние между блоками В и С равно
L. Найти модуль скорости
A
υ
тела
2
υ
1
υ
α
υ
υ
A
B C
L
H

МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
42
А в тот момент, когда оно находится на расстоянии H от прямой
ВС.
Ответ:
2
A
2
1
⎟
⎠
⎞
⎜
⎝
⎛
+=
H
L
υυ
.
Задача 6
Лодку подтягивают к пристани высотой
Н с помощью верев-
ки, наматываемой на вал лебедки. Радиус вала равен
R << H. Вал
вращается с постоянной угловой скоростью
ω
. Определить зависи-
мость модулей скорости и ускорения лодки от длины веревки
L > Н. Движение лодки считается поступательным.
Ответ:
22
HL
RL
−
=
ω
υ
,
()
23
22
2
)(
HL
rH
a
−
=
ω
.
Задача 7.
Найти уравнение кинематической
связи для ускорений тел, подвешенных на
нерастяжимых нитях (см. рис.).
Ответ:
02
321
=++ aaa
, где
1
a
,
2
a
и
3
a
–
проекции ускорений тел на вертикальную
ось декартовой системы координат.
Задача 8
Определить закон изменения модуля скорости материальной
точки, движущейся в плоскости, если ее движение описывается в
полярной системе координат следующим законом: )1()(
btatr −
=
,
bt
bt
t
−
=
1
)(
ϕ
, где a и b – положительные постоянные величины.
Ответ:
2
)1(
1
1
bt
ab
−
+=
υ
, при
b
t
1
< .
3
2
1

Глава 1. Кинематика материальной точки и простейших систем
43
Задача 9
Четыре тела подвешены на нерастя-
жимых нитях (см. рис.). Найти ускорение
тела 4, если известны ускорения остальных
трех тел.
Ответ:
()
42
3214
aaaa
+
+−= , где
1
a ,
2
a ,
3
a и
4
a – проекции ускорений тел на верти-
кальную ось декартовой системы координат.
Задача 10
Найти уравнение кинематической связи для ускорений тел,
подвешенных на нерастяжимых нитях так, как показано на рисун-
ке.
Ответ:
0
2
1
2
1
2
54321
=
⎟
⎠
⎞
⎜
⎝
⎛
+++
+
+ aaa
R
r
a
R
rR
a
,
где
1
a ,
2
a ,
3
a ,
4
a и
5
a – проекции ускорений тел на вертикальную
ось декартовой системы координат.
4
3
1 2
1
2
3
r
R
4
5
МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
44
Задача 11
Два тела подвешены на нерастя-
жимых нитях, как показано на рисунке.
Определить ускорение тела 2, если из-
вестно ускорение тела 1.
Ответ:
12
16aa −= , где
1
a и
2
a – про-
екции ускорений тел на вертикальную
ось декартовой системы координат.
2
1

Глава 2. Динамика материальной точки и простейших систем
45
ГЛАВА 2
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ И
ПРОСТЕЙШИХ СИСТЕМ
2.1. Теоретический материал
2.1.1. Законы Ньютона
Первый закон Ньютона. Существуют такие системы отсче-
та, относительно которых изолированная материальная точка (на
которую не действуют силы) движется равномерно и прямолиней-
но или покоится. Такие системы отсчета называются инерциаль-
ными.
Второй закон Ньютона. В инерциальной системе
отсчета
произведение массы материальной точки на ее ускорение равно
сумме всех сил, действующих на эту материальную точку со сто-
роны других тел:
∑
=
i
i
m Fa . (2.1)
Третий закон Ньютона. Силы взаимодействия двух матери-
альных точек:
1) парные и приложены к разным материальным точкам,
2) одной природы,
3) равны по модулю,
4) противоположны по направлению,
5) направлены вдоль прямой, соединяющей материальные
точки.
Уравнение движения – второй закон Ньютона, записанный в
векторной форме или в проекциях на оси инерциальной системы
отсчета:
∑
=
i
i
m Fa или
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
=
=
=
∑
∑
∑
i
izz
i
iyy
i
ixx
Fma
Fma
Fma
.
,
,
(2.2)
Заметим, что уравнение движения можно записать в проек-
циях на любую
, в том числе и произвольно движущуюся относи-
тельно инерциальной системы отсчета, ось. Для этого достаточно
МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
46
умножить скалярно левую и правую части векторного уравнения
движения (2) на единичный вектор (орт), задающий направление
этой оси. Например, на направление скорости
τ
и на направление,
перпендикулярное скорости
n :
,
,
∑
∑
=
=
i
i
i
inn
Fma
Fma
ττ
(2.3)
где
)()()( ttat
nn
na
=
и
)()()( ttat τa
ττ
=
– нормальная и тангенци-
альная составляющие ускорения материальной точки.
Законы динамики – это законы Ньютона и законы, описы-
вающие индивидуальные свойства сил.
2.1.2. Законы, описывающие индивидуальные свойства сил
А. Гравитационные силы
Закон всемирного тяготения.
Материальные точки притя-
гиваются друг к другу с силами
21
F и
12
F (см. рис. 2.1), модули
которых пропорциональны произведению их масс и обратно про-
порциональны квадрату расстояния между ними:
12
3
12
21
1221
rFF
r
mm
G=−= . (2.4)
Здесь
G = 6,673⋅10
−11
Н⋅м
2
/кг
2
– гравитационная постоянная,
1212
rrr −= .
Силы гравитационного взаимодействия сферически симмет-
ричных тел, как нетрудно показать, определяются выражением
Рис. 2.1. Ориентация сил гравитационного взаимодействия
дв
у
х мате
р
иальных точек
m
1
1
r
S
m
2
2
r
12
r
21
F
12
F

Глава 2. Динамика материальной точки и простейших систем
47
(2.4), в котором
12
r – радиус-вектор центра второго тела относи-
тельно центра первого тела.
Сила тяжести, действующая на материальную точку, –
сумма силы гравитационного притяжения Земли (или любого дру-
гого космического объекта) и центробежной силы инерции (см.
Главу 4), действующей на материальную точку в системе отсчета,
связанной с Землей.
Сила тяжести, действующая на тело, – сумма сил тяжести,
действующих на материальные точки этого тела.
В однородном поле силы тяжести вблизи поверхности Земли
сила тяжести
т
F равна произведению массы тела m на ускорение
центра масс тела при свободном падении (
ускорение свободного
падения
)
g
относительно Земли: gF m
=
т
.
Вес тела – сила, с которой тело, находящееся в поле сил тя-
жести, действует на неподвижную относительно него опору или
подвес, препятствующие свободному падению тела.
Б. Упругие силы
Если после прекращения внешнего воздействия деформиро-
ванное тело восстанавливает свою форму и размеры, то деформа-
ция называется упругой.
Закон Гука. При малых упругих деформациях величина де-
формации пропорциональна величине вызывающей ее силы.
В частности, при деформации растяжения (сжатия) упругого
стержня (пружины, резинового шнура) деформация стержня про-
порциональна величине вызывающей ее силы, действующей вдоль
стержня:
F
k
l
1
Δ = . (2.5)
Здесь k –
коэффициент жесткости (упругости) стержня,
0
Δ lll −=
– удлинение стержня, l и l
0
– длина стержня в деформированном и
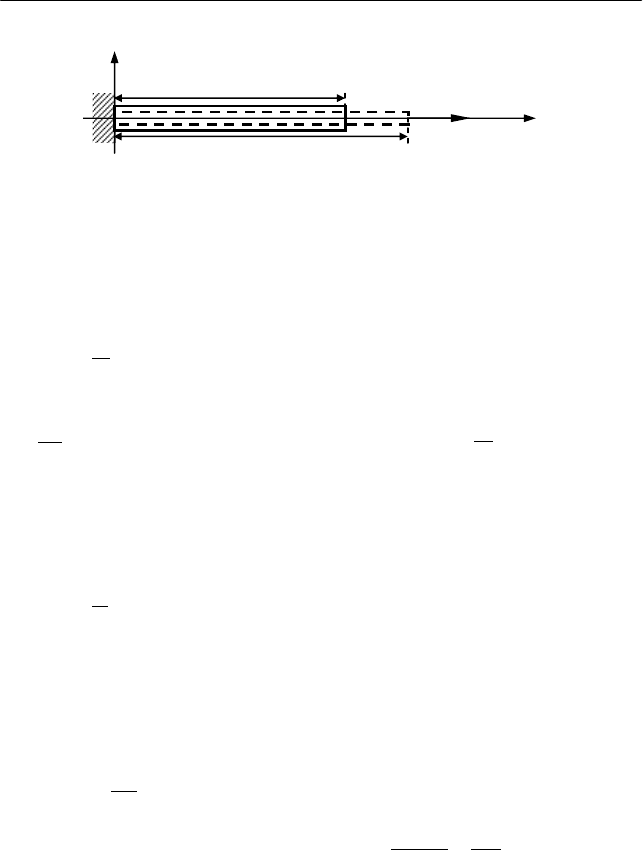
недеформированном состояниях (см. рис. 2.2).
Если сила, действующая на стержень, направлена противопо-
ложно указанному на рис. 2 направлению, то упругий стержень ис-
пытывает сжатие. При этом
0Δ
<
l и F в формуле (2.5) следует счи-
тать проекцией силы
F
на ось X системы координат, изображен-
ной на рис. 2.2.
МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
48
При деформации растяжения (сжатия) однородного упругого
стержня с постоянным вдоль стержня сечением относительное уд-
линение стержня
ε
пропорционально нормальному напряжению
σ
:
σε
E
1
=
. (2.6)
Здесь E –
модуль Юнга материала, из которого сделан стержень,
0
Δ
l
l
=
ε
– относительное удлинение стержня,
S
F
=
σ
– нормальное
напряжение
, S – площадь поперечного сечения стержня.
Заметим, что для однородного упругого стержня с постоян-
ным вдоль стержня сечением коэффициент жесткости (упругости)
этого стержня связан с модулем Юнга соотношением:
E
L
S
k =
. (2.7)
В случае растяжения (сжатия) стержня уменьшаются (увели-
чиваются) его поперечные размеры. При этом отношение относи-
тельного поперечного сжатия стержня к его относительному удли-
нению зависит только от материала стержня и называется коэффи-
циентом Пуассона:
ε
ε
μ
⊥
−= . (2.8)
Здесь
μ
– коэффициент Пуассона,
00
0
Δ
d
d
d
dd
=
−
=
⊥
ε
– относитель-
ное изменение поперечных размеров стержня, d и d
0
– поперечный
линейный размер стержня в деформированном и недеформирован-
ном состояниях (см. рис. 2.2).
Рис. 2.2. Удлинение стержня под действием
продольной силы
l
0
F
l
d
0
d
X
Y
Глава 2. Динамика материальной точки и простейших систем
49
При деформации стержня возникают внутренние упругие си-
лы
упр
F , действующие между его частями, которые стремятся вер-
нуть стержень в недеформированное состояние. Напряжение упру-
гих сил равно
S
F
упр
упр
=
σ
. (2.9)
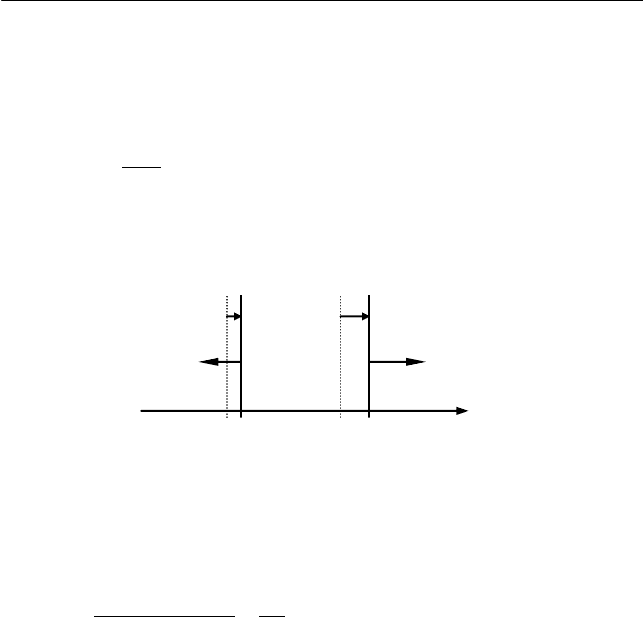
Рассмотрим слой стержня с координатами границ
x
и
xx d+
вдоль стержня (см. рис. 2.3).
В результате действия внутренних упругих сил возникает
смещение левой
ξ
(x) и правой
ξ
(x+dx) границ выделенного слоя.
Тогда
относительная продольная деформация
ε
этого слоя равна
'
d
)()d(
x
xx
xxx
ξ
ξξξ
ε
=
∂
∂
=
−+
= . (2.10)
Закон Гука в этом случае принимает вид
'
упр
)(
x
EEx
ξεσ
== . (2.11)
В случае деформации слоя изменяются его поперечные раз-
меры. При этом отношение поперечной к продольной деформации
определяется коэффициентом Пуассона в соответствии с (2.8).
При ускоренном движении стержня под действием внешней
силы, вызывающей его деформацию, возникают неоднородные
вдоль стержня напряжения упругих сил. В этом случае возникаю-
щие неоднородные деформации по-прежнему определяются
выра-
жениями (2.11), (2.8).
Рис. 2.3. Смещение границ выделенного
слоя сте
р
жня
x x+dx
ξ
(x+dx)
ξ
(x)
σ
(x)
σ
(x+dx)
X

МЕХАНИКА. МЕТОДИКА РЕШЕНИЯ ЗАДАЧ
50
В. Силы трения
Сила трения
– составляющая силы непосредственного взаи-
модействия тел при соприкосновении вдоль плоскости соприкос-
новения.
Сила нормального давления (реакции опоры) – состав-
ляющая силы взаимодействия тел при непосредственном сопри-
косновении вдоль направления нормали к плоскости соприкосно-
вения.
Силы вязкого (внутреннего) трения
в
F – силы трения, воз-
никающие при движении тела в вязкой (жидкой или газообразной)
среде.
При малой величине скорости
υ движения тела относительно
среды
υF
η
−
=
в
, (2.12)
где
η
– коэффициент вязкого (внутреннего) трения.
Сила вязкого трения покоя равна нулю: 0
вп
=
F .
Силы сухого трения
c
F – силы трения, возникающие при
непосредственном соприкосновении твердых тел.
Силы трения покоя
п
F
– силы сухого трения, возникающие
в отсутствие относительного движения взаимодействующих тел.
Сила трения скольжения
cк
F – сила сухого трения, возни-
кающая при относительном движении взаимодействующих тел.
Закон Амонтона – Кулона – эмпирический закон, описы-
вающий свойства сил сухого трения:
1) модуль силы сухого трения покоя может принимать значе-
ния от нуля до некоторого своего максимального значения:
maxп
0 FF ≤≤ ;
2) модуль силы сухого трения скольжения равен максималь-
ному значению модуля силы сухого трения покоя:
maxcк
FF
=
;
3) модуль силы сухого трения скольжения пропорционален
модулю силы нормального давления:
NF
μ
=
cк
, (2.13)
где
μ
– коэффициент (силы сухого) трения, не зависящий от силы
нормального давления, а только от вещества и состояния поверхно-
стей трущихся тел;