Руководство по программированию токарного станка с системой ЧПУ MELDAS серии 60 Meldasmagic 64
Подождите немного. Документ загружается.

12. Функции смещения резца
12.1 Смещение резца
12.1.2 Расширенный метод пускового смещения резца
Функция и назначение
При настройке параметра "#1100 Tmove" производится выбор операции смещения при
задании команды Т, будет ли она выполняться при выполнении команды Т или она будет
выполняться с наложением на команду движения.
В дополнение к данным двум методам с помощью данного параметра можно выбирать
тип коррекции только уровня износа при выполнении команды Т и коррекции длины резца
с наложением на команду движения.
Подробное описание
Для выбора типа коррекции только уровня износа при выполнении команды Т и коррекции
длины резца с наложением на команду движения, следует задать значение 2 для "#1100
Tmove"
Если задано значение 2, смещение по длине будет соответствовать настройке 1 (с
наложением на команду движения), а смещение по износу будет соответствовать
настройке 0 (движение при задании команды Т).
Операция смещения для каждой настройки "#1100 Tmove" приведена ниже.
При уровне смещения по длине: 7.000мм уровне смещения по износу: 0.500мм
Пример программы
обработки
Значение станка
#1100 Tmove = 0 #1100 Tmove = 1 #1100 Tmove = 2
G28 X. ;
G0 T116. ;
G0 X100. ;
0.000
7.500
107.500
0.000
0.000
107.500
0.000
0.500
107.500
(Примечание 1) Если следующие G команды заданы в одном блоке с командой T,
коррекция по износу будет производиться только в данном блоке.
Ожидание коррекции того же блока: G04, G10, G11, G65, G92
Уровень износа будет скорректирован только в блоке, в котором заданы другие G
команды. (Все оси)
(Примечание 2) После временной отмены уровня смещения уровень смещения
возвратится для каждой оси команды движения. В данный момент времени
движение будет соответствовать параметру "#1101 Tabsmv" как для смещения
по длине, так и для смещения по износу.
G команда временной отмены: G28, G30, G53
(1) Соотношение с параметром "#1101 Tabsmv" (наложение уровня смещения
резца для абсолютной команды)
Если для "#1100 Tmove" задано значение 2, операция смещения будет
соответствовать настройке "#1101 Tabsmv".
202
12. Функции смещения резца
12.1 Смещение резца
(2) Параметры
#
Э
лемен
т
Подробное описание
Диапазон
настройки
1100
Tmove
Определение времени на выполнение смещения по
длине резца и смещения по износу.
0: Коррекция при выполнении команды T.
1 : Наложение и коррекция с командой движения в блоке,
в котором обнаружена команда T. Если в том же блоке
отсутствует команда движения, коррекция будет
выполняться после наложения команды движения в
следующем блоке команды движения.
2: Коррекция уровня износа при выполнении команды Т.
Наложение и коррекция уровня смещения по длине резца с
командой движения в том же блоке. Если в том же блоке
отсутствует команда движения, коррекция будет
выполняться после наложения команды движения в
следующем блоке команды движения.
0 - 2
1101
Tabsmv Задание типа команды движения, наложенной при
задании для #1100 Tmove значений 1 или 2.
0: Коррекция независимо от типа команды движения.
1 : Коррекция только для команды движения с
использованием команды абсолютного значения.
0,1
203
12. Функции смещения резца
12.2 Смещение по длине резца
12.2 Смещение по длине резца
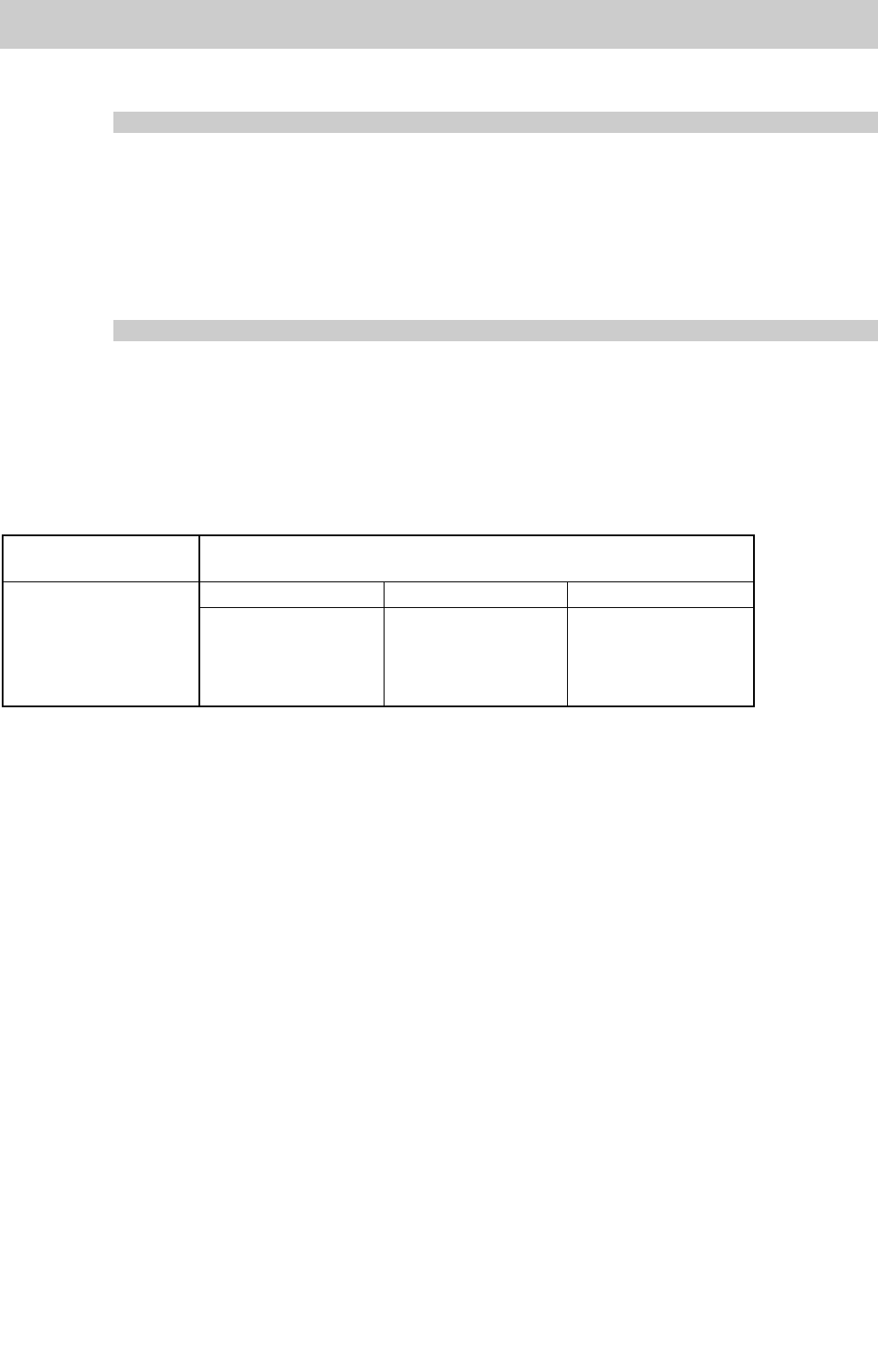
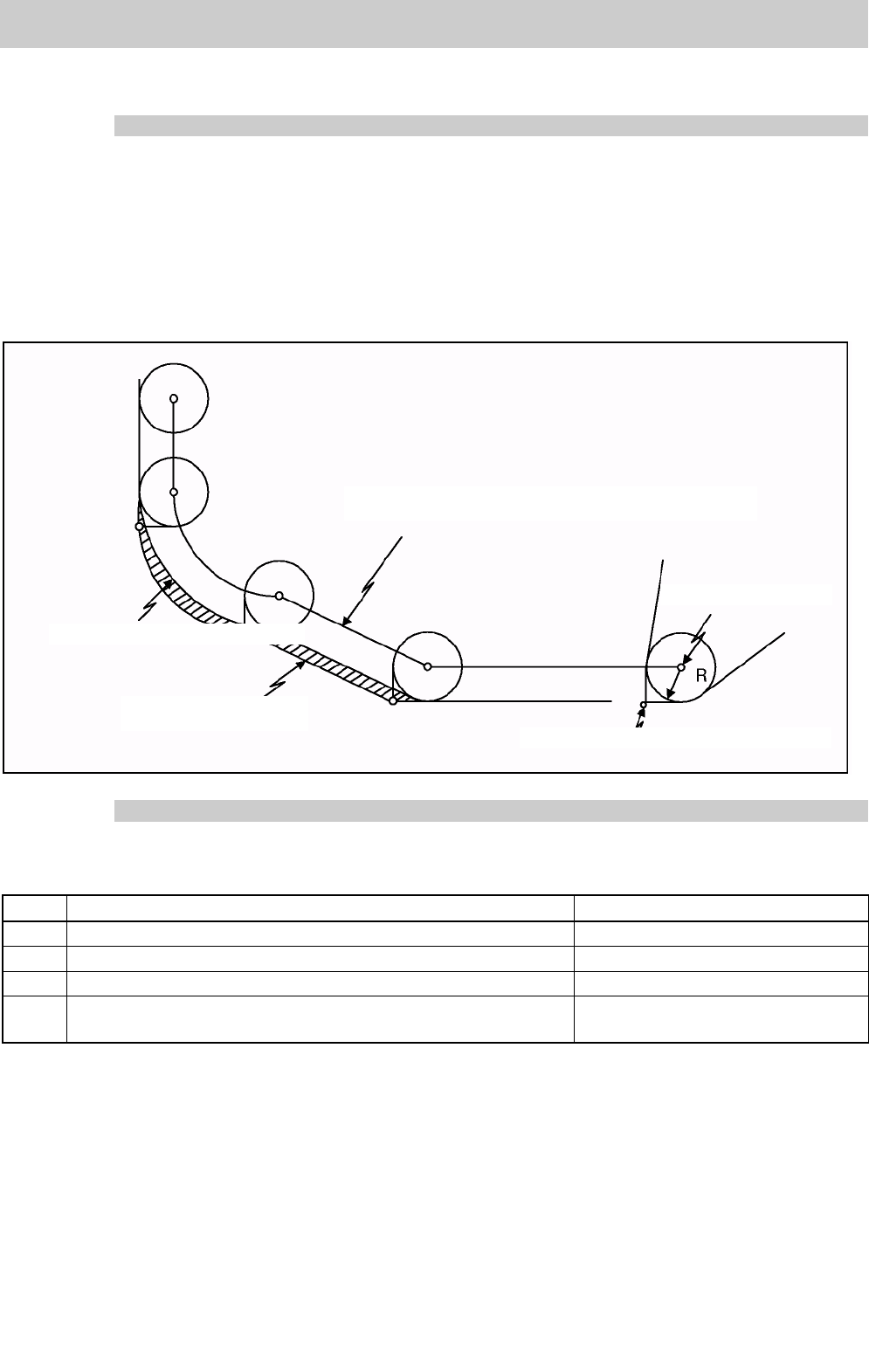
Настройка уровня смещения по длине резца
Данная функция производит смещение по длине резца в соответствии с
запрограммированной основной позицией. В качестве данной позиции, как правило,
задается центральная позиция револьверной головки либо позиция головки основного
резца.
(1) Центральная позиция револьверной головки
(2) Позиция головки основного резца
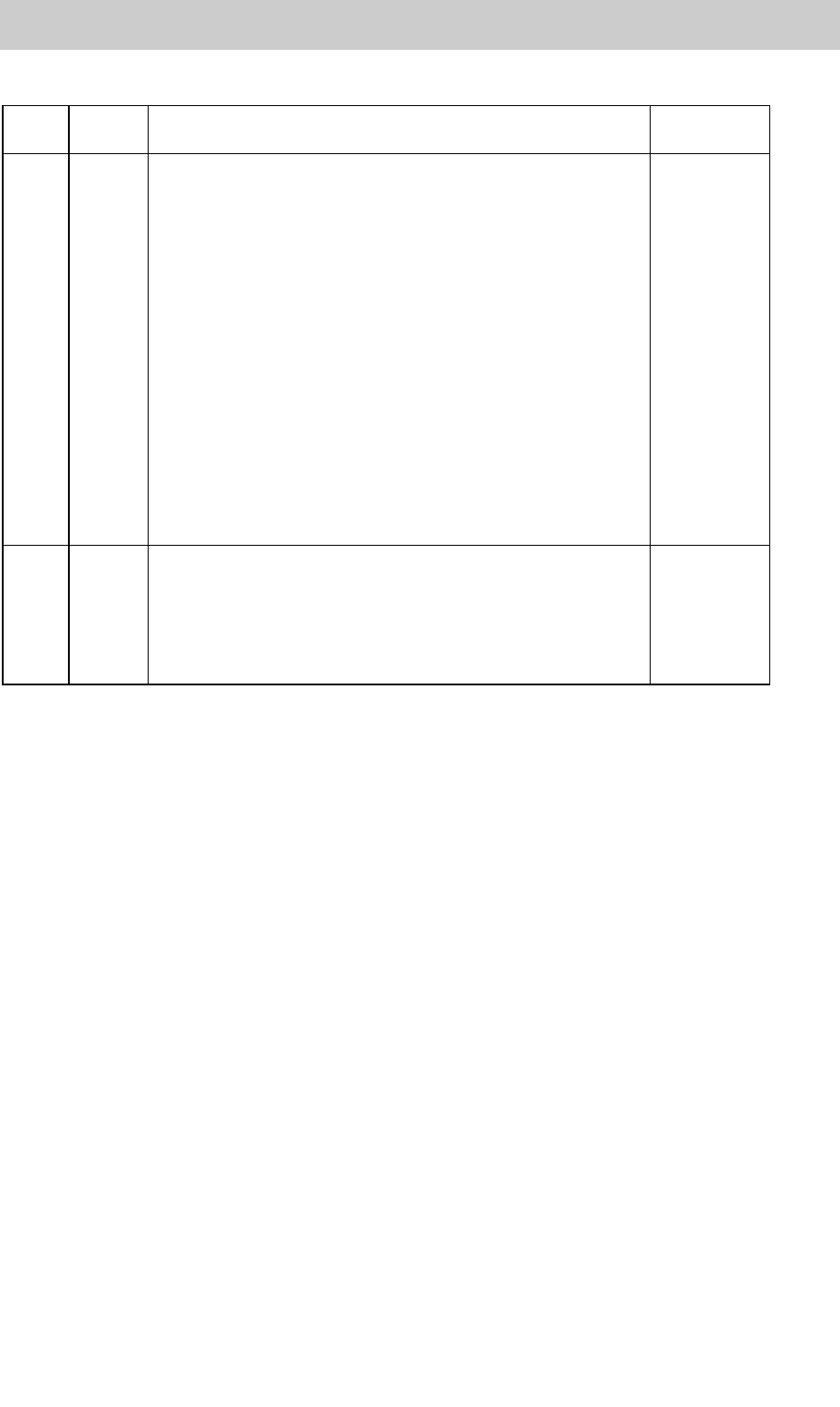
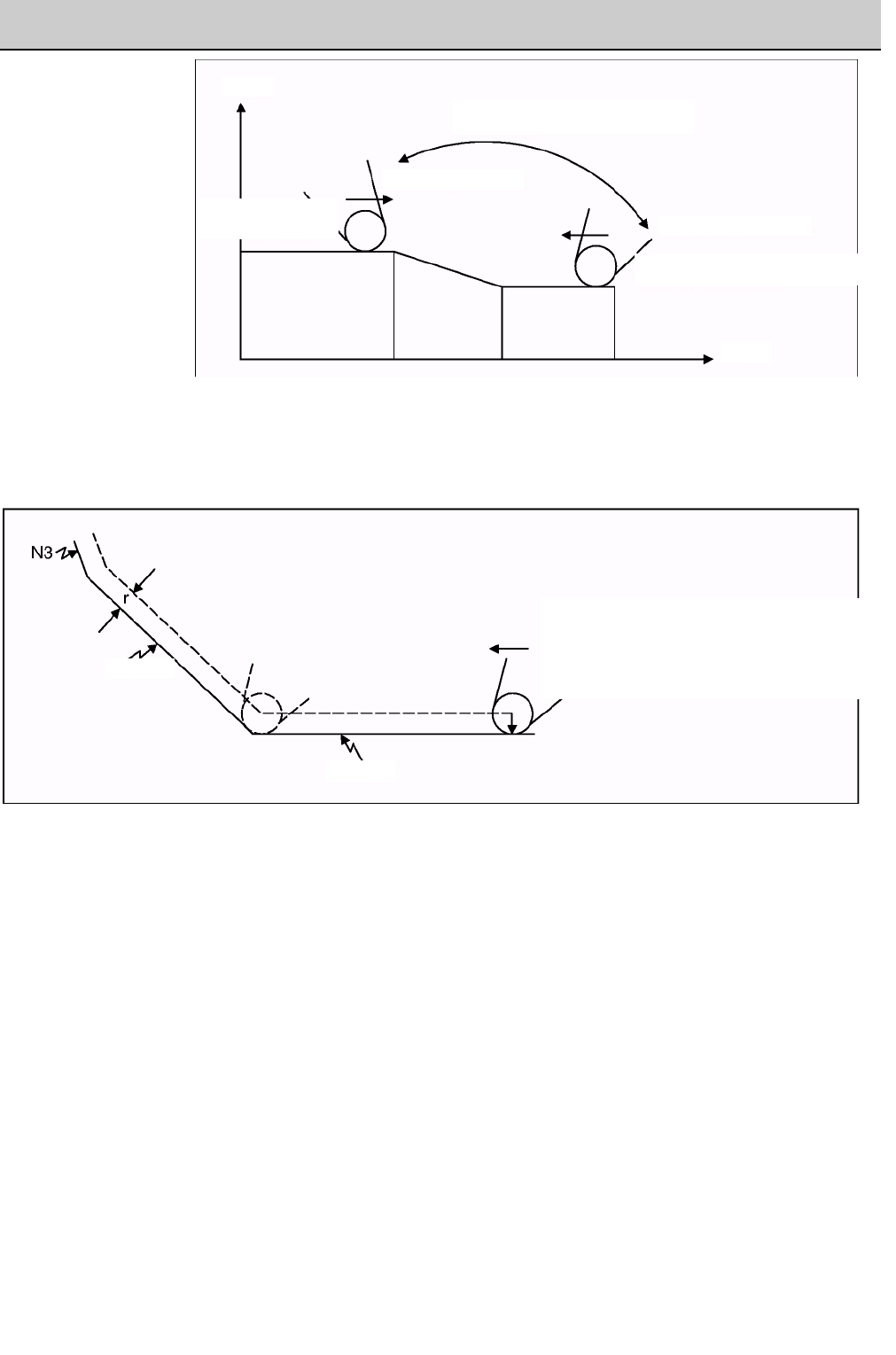
Изменение номера смещения по длине резца
При изменении номеров резца смещение по длине резца, соответствующее новым номерам
резца, добавляется к значениям уровня движения, заданным в программе обработки.
В данном примере длина резца смещается с номером резца, а смещение происходит в
блоке с командой движения.
204
Основная позиция
(
базовая точка
)
Уровень смещения по
дл
ин
е
резца
п
о
ос
и Х
Уровень смещения по
длине резца по оси
Z
Основной резе
ц
Базовая точка
Резец, использ
у
емый при обработке
Уровень смещения по
д
лин
е
резца
п
о
ос
и Х
Уровень смещения по
дл
ин
е
резца
п
о
ос
и Z
Траектория смещенного резца
Уровень
смещения (новый)
У
р
овень смещения
(
ста
р
ый
)
Программная траектория обработки
12. Функции смещения резца
12.2 Смещение по длине резца
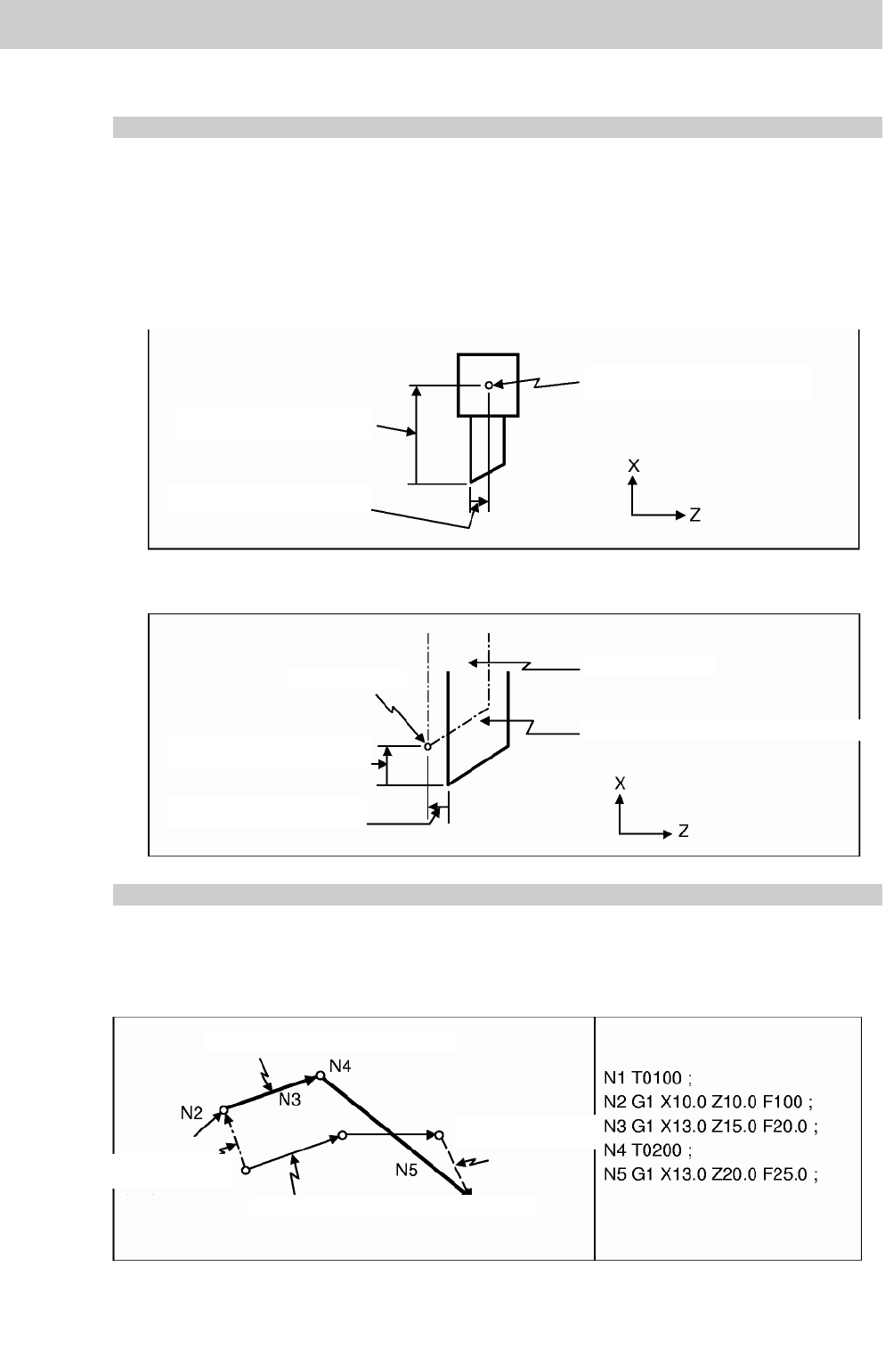
Отмена смещения по длине резца
(1) Если задано значение 0 в качестве номера смещения
Смещение отменяется, если командой Т в качестве номера смещения по длине
резца задано значение 0.
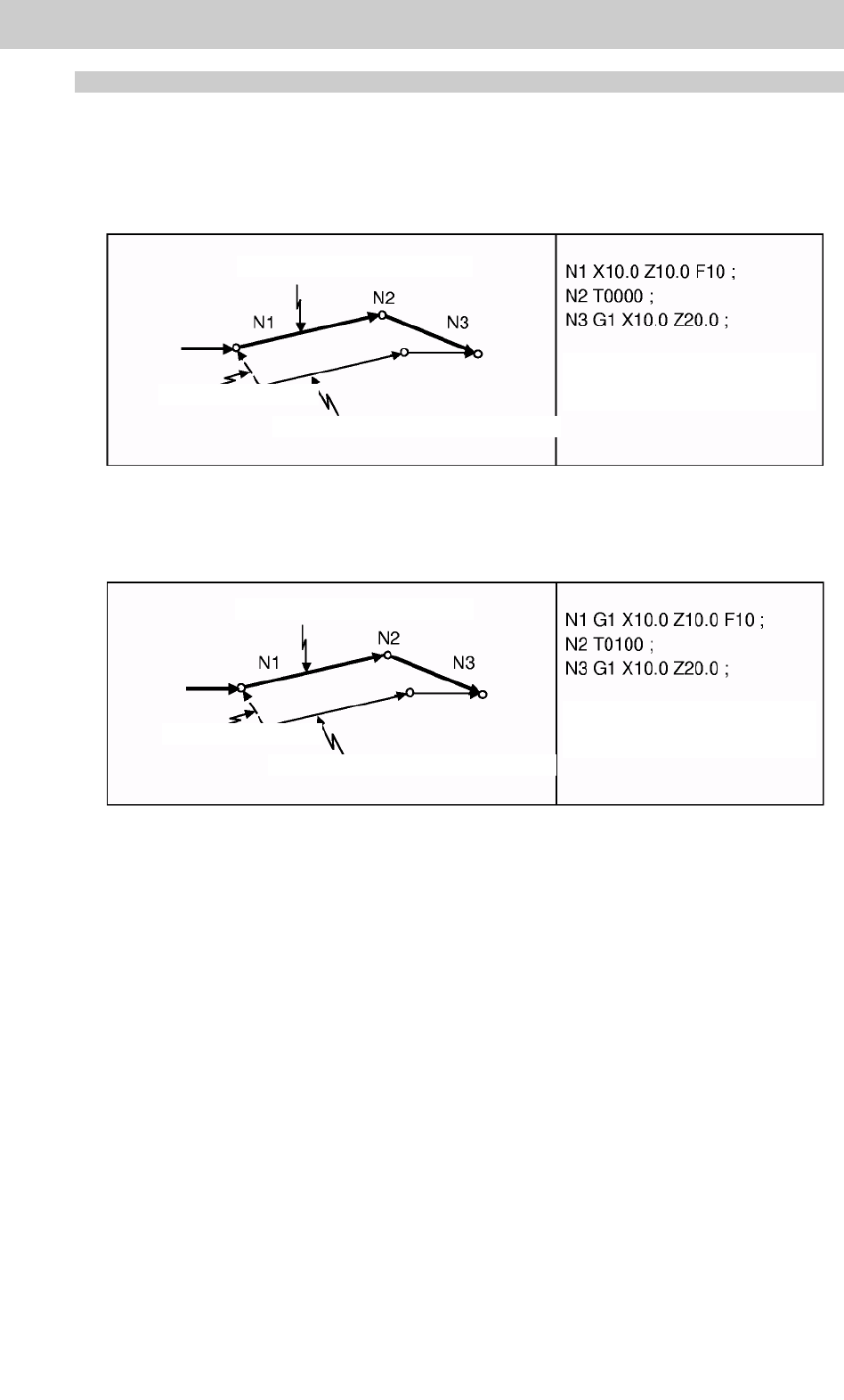
(2) Если задан уровень смещения 0
Смещение отменяется, если командой Т в качестве уровня смещения в номере
смещения по длине резца задано значение 0.
(Примечание 1) Если заданы команды G28, G29 или G30, происходит временная отмена
смещения. Таким образом, станок перемещается в позицию, в которой
произошла отмена смещения, после чего уровень смещения сохраняется в
модуле памяти. Это значит, что по следующей команде движения станок
переместится в позицию смещения.
(Примечание 2) Если в одном и том же блоке заданы команды G28, G29 или G30, а
также команда отмены смещения, станок перемещается в позицию, в которой
произошла отмена смещения, однако уровень смещения остается сохраненным
в блоке памяти. Это значит, что на дисплей могут быть выведены координаты
включая уровень смещения. Данная команда должна задаваться в отдельном
блоке, чтобы не нужно было сохранять уровень смещения в памяти.
(Примечание 3) Даже если текущий, выбранный при помощи MDI уровень смещения
номера смещения будет изменен во время автоматической операции,
измененный уровень смещения не будет действителен, если не будет
выполняться Т команда с тем же номером.
(Примечание 4) Значения смещения по длине резца и смещения по износу головки
резца удаляются при сбросе и при аварийной остановке. Они могут быть
сохранены при помощи параметра "#1099 Treset".
205
Траектория смещения резца
В
д
анном случае, смещение
производится в блоке с
коман
д
ой
д
вижения.
Уровень смещения
Программная траектория обработки
Траектория смещения резца
В
д
анном случае, смещение
производится в блоке с
коман
д
ой
д
вижения.
Уровень смещения
Программная траектория обработки

12. Функции смещения резца
12.3 Смещение по износу головки резца
12.3 Смещение по износу головки резца
Настройка уровня смещения по износу головки резца
Износ, которому подвергается используемый резец, может быть смещен.
Отмена смещения по износу головки резца
Смещение по износу головки резца может быть отменено, если в качестве номера
смещения задан 0.
(Примечание 1) Если заданы команды G28, G29 или G30, происходит временная отмена
смещения. Таким образом, станок перемещается в позицию, в которой произошла
отмена смещения, после чего уровень смещения сохраняется в модуле памяти. Это
значит, что по следующей команде движения станок переместится в позицию
смещения.
(Примечание 2) Если в одном и том же блоке заданы команды G28, G29 или G30, а также
команда отмены смещения, станок перемещается в позицию, в которой произошла
отмена смещения, однако уровень смещения остается сохраненным в блоке
памяти. Это значит, что на дисплей могут быть выведены координаты включая
уровень смещения. Данная команда должна задаваться в отдельном блоке, чтобы
не нужно было сохранять уровень смещения в памяти.
(Примечание 3) Даже если текущий, выбранный при помощи MDI уровень смещения
номера смещения будет изменен во время автоматической операции, измененный
уровень смещения не будет действителен, если не будет выполняться Т команда с
тем же номером.
(Примечание 4) Значения смещения по длине резца и смещения по износу головки резца
удаляются при сбросе и при аварийной остановке. Они могут быть сохранены при
помощи параметра "#1099 Treset ".
206
Головка резца
Уровень смещения по износу
г
оло
вки
резца
п
о
ос
и Х
Уровень смещения по износ
у
головки резца по оси Z
Траектория смещения резца
В
д
анном случае, смещение
производится в блоке с
коман
д
ой
д
вижения.
Уровень смещения
Программный п
у
ть обработки
12. Функции смещения резца
12.4 Коррекция на радиус вершины резца
12.4 Коррекция на радиус вершины резца; G40, G41, G42, G46
Функция и назначение
Головка резца, как правило, закругляется, поэтому гипотетическая точка вершины резца
рассматривается как головка резца в программных целях. В таком случае ошибка,
вызванная закруглением головки резца, увеличивается при конической или круговой резке
между фактически запрограммированной формой и формой резки. Коррекция на радиус
вершины резца является функцией для автоматического расчета и смещения ошибки
посредствам задания значения радиуса головки резца. Командные коды позволяют
фиксировать направление смещения либо производить его автоматическое определение.
Функции и форматы команд
Код Функция Формат команды
G40
Отмена режима коррекции на радиус вершины резца G40 (Xx/Uu Zz/Ww li Kk) ;
G41
Режим левой коррекции на радиус вершины резца включен G41 (Xx/Uu Zz/Ww) ;
G42
Режим правой коррекции на радиус вершины резца включен G42 (Xx/Uu Zz/Ww) ;
G46
Режим автоматического определения направления
коррекции на радиус вершины резца включен
G46 (Xx/Uu Zz/Ww) ;
(Примечание 1) Посредством предварительно заданной гипотетической точки вершины
резца и команд движения в программе обработки функция коррекции на радиус
вершины резца G46 автоматически определяет направление коррекции и
производит коррекцию на радиус вершины резца.
(Примечание 2) G40 служит для отмены режима коррекции на радиус вершины резца.
207
Траектория центра головки резца в заданной
программной форме обработки
Центр головки резца
Фактическая форма обработки
Форма обработки,
заданная в п
р
ог
р
амме
Гипотетическая точка вершины резца
12. Функции смещения резца
12.4 Коррекция на радиус вершины резца
(Примечание 3) Коррекция на радиус вершины резца производит предварительное
считывание данных двух последующих блоков команд движения (максимум 5
блоков, если команды движения отсутствуют) и контролирует траекторию центра
радиуса вершины резца при помощи метода расчета точки пересечения, так что
смещение от запрограммированной траектории происходит на значение,
эквивалентное радиусу вершины резца.
(Примечание 4) На приведенном выше рисунке "r" является уровнем коррекции на радиус
вершины резца (радиус вершины резца).
(Примечание 5) Уровень коррекции на радиус вершины резца соответствует значению
длины резца и предварительно задается вместе с точкой вершины резца.
(Примечание 6) Если в 4 и более блоках отсутствуют значения команд движения из 5
непрерывно следующих блоков, в результате образуется эффект недостаточной или
избыточной резки.
Блоки, в которых действует функция опционального пропуска блока, игнорируются.
(Примечание 7) Коррекция на радиус вершины резца действует также для фиксированных
циклов (G77 ~ G79) и циклов грубой резки (G70, G71, G72, G73).
Тем не менее в циклах грубой резки окончательная форма с применением коррекции на
радиус вершины резца будет вырезаться с отменой коррекции, а после завершения
резки операция автоматически вернется в режим коррекции.
(Примечание 8) Команды нарезания резьбы приводят к временной отмене коррекции за
один блок до начала выполнения команд.
(Примечание 9) Команда коррекции на радиус вершины резца (G41 или G42) может
задаваться во время коррекции на радиус вершины резца (G46). Нет необходимости отменять
коррекцию данных G40.
(Примечание 10) Плоскость коррекции, оси движения и следующий вектор направления
движения соответствуют команде выбора плоскости, задаваемой при помощи G17, G18 или
G19.
G17 X-Y плоскость X, Y, I, J
G18 Z-X плоскость Z, X, K, I
G19 Y-Z плоскость Y, Z, J, K
208
Ось X
А
втоматическое
оп
р
е
д
еление в
р
ежиме G46
Левая коррекция
Левая компенсация,
фиксированная в
р
ежиме
,
G41
Правая коррекция
Правая коррекция,
ф
ик
с
и
ро
в
а
нн
а
я в
ре
жим
е
G
42
Ось Z
Перед выполнением блока N1
следующий блок команды движения
предварительно считывается, после
чего производится расчет координаты
точки пересечения.
Блок N2
Блок N1
12. Функции смещения резца
12.4 Коррекция на радиус вершины резца
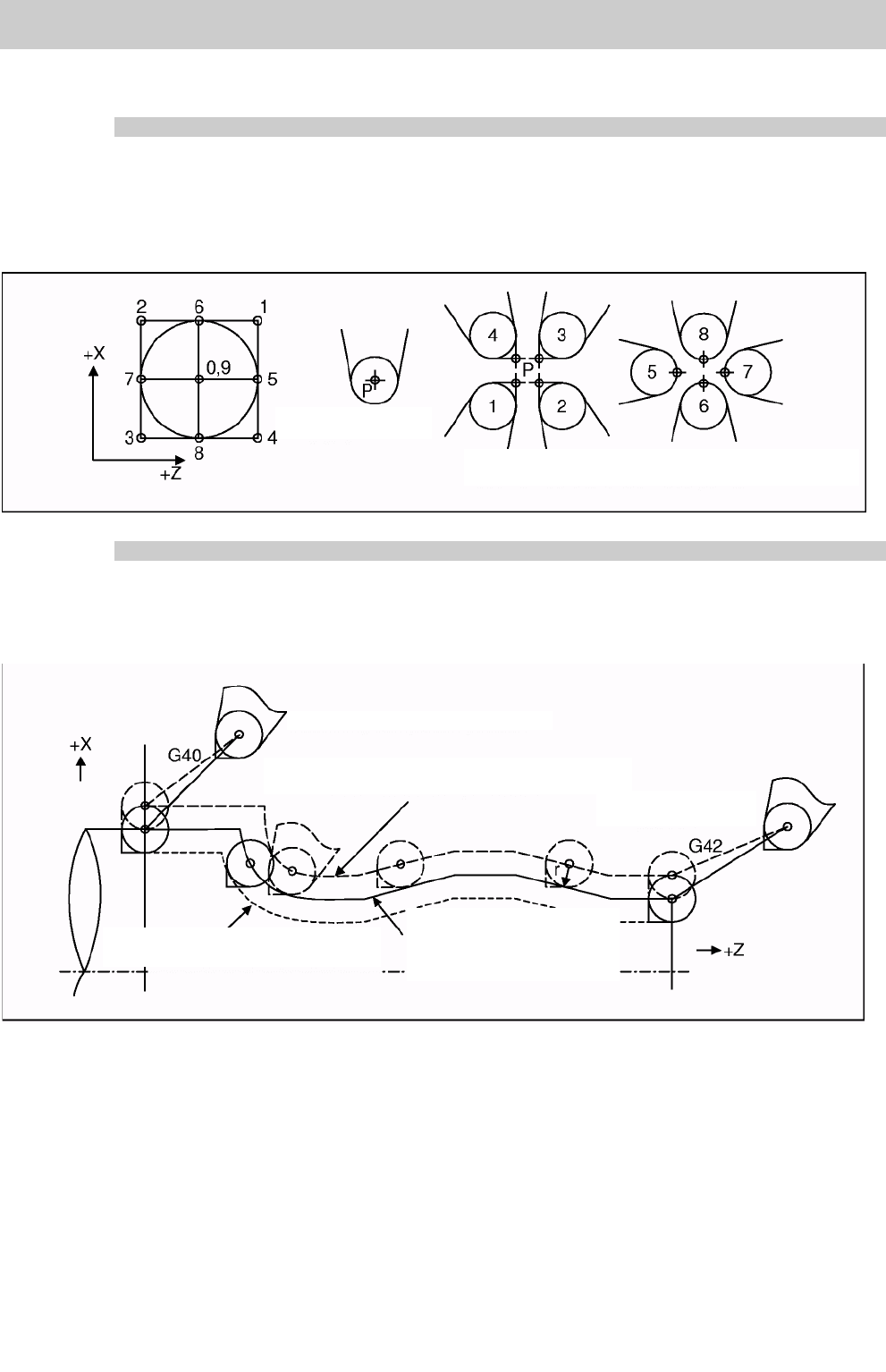
12.4.1 Направления коррекции и точки головки резца
Точка вершины резца
Так как, как правило, происходит закругление вершины резца, запрограммированная позиция
вершины резца совмещается с точкой Р, показанной в примерах на рисунках ниже.
При коррекции на радиус вершины резца из всех показанных на рисунках ниже точек,
демонстрирующих позиционное соотношение, выбирается и предварительно задается одна
точка для каждого значения длины резца.
(Выбор из точек 1 по 8 в режиме G46 и 0 по 9 в режиме G41/G42.)
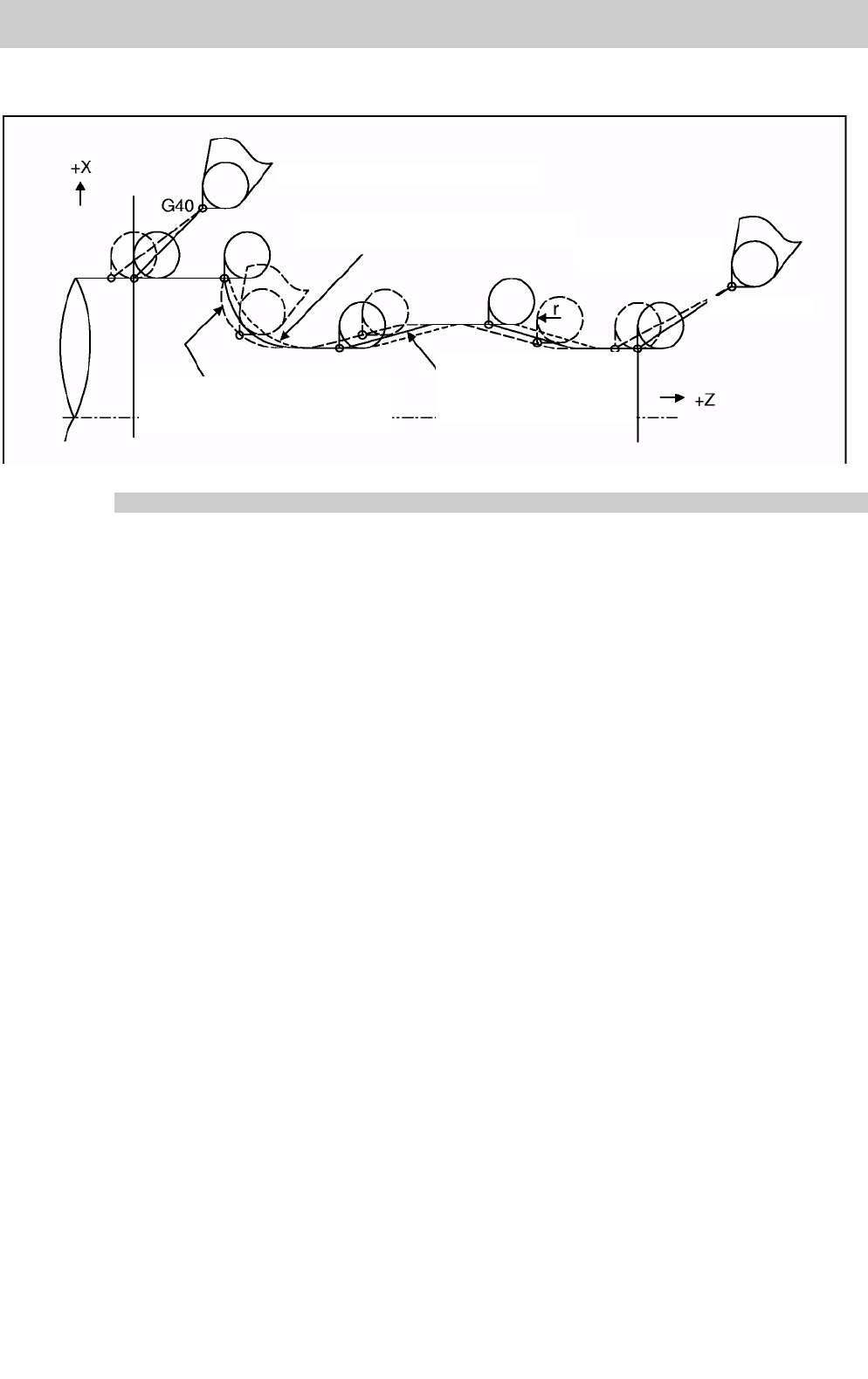
Точка вершины резца и операция коррекции
(1) Если центр вершины R совмещен с позицией начала обработки
209
Точка вершины
резца
0
и
л
и
9
Соотношение между значениями условной
вершины резца и точками вершины резца
Позиция завершения обработки
Траектория центра вершины R с коррекцией
на радиус вершины резца
Позиция начала
обработки
Программная траектория
или форма обработки с
коррекцией на радиус
вершины резца
Форма обработки без коррекции
на радиус вершины резца
12. Функции смещения резца
12.4 Коррекция на радиус вершины резца
(2) Если точка вершины резца совмещена с позицией начала обработки
Направления коррекции
(1) Направление коррекции команд G41/G42 определяется кодами G41/G42.
Направление в команде G46 автоматически определяется в соответствии со следующей
таблицей по соотношению между точками вершины резца и заданными векторами
движения.
(2) Если начата коррекция на радиус вершины резца, а исходный вектор движения
(включая G0) соответствует отметке "x" в таблице, направление коррекции не может
быть определено, поэтому оно определяется следующим вектором движения. Если
направление не может быть определено после 5 предварительно считанных блоков,
выдается программная ошибка (P156).
(3) Если предпринята попытка обратить направление коррекции во время выполнения
коррекции на радиус вершины резца, выдается программная ошибка (P157), за
исключением тех случаев, когда обращение направления производится в блоке G00.
Даже если направления различаются до и после блоков G28, G30 или G53, ошибка не
будет наблюдаться, так как происходит временная отмена коррекции. При использовании
параметра (#8106 G46 избежание ошибки обратной оси), передвижение резца также
возможно без изменения с сохранением того же направления коррекции.
210
Позиция завершения обработки
Форма обработки без коррекции
на
р
а
д
и
у
с ве
р
шины
р
ез
ц
а
Позиция начала
обработки
G42 или G46
Программная траектория
или форма обработки с
коррекцией на радиус
вершины резца
Траектория точки вершины
резца R с коррекцией на
радиус вершины резца
12. Функции смещения резца
12.4 Коррекция на радиус вершины резца
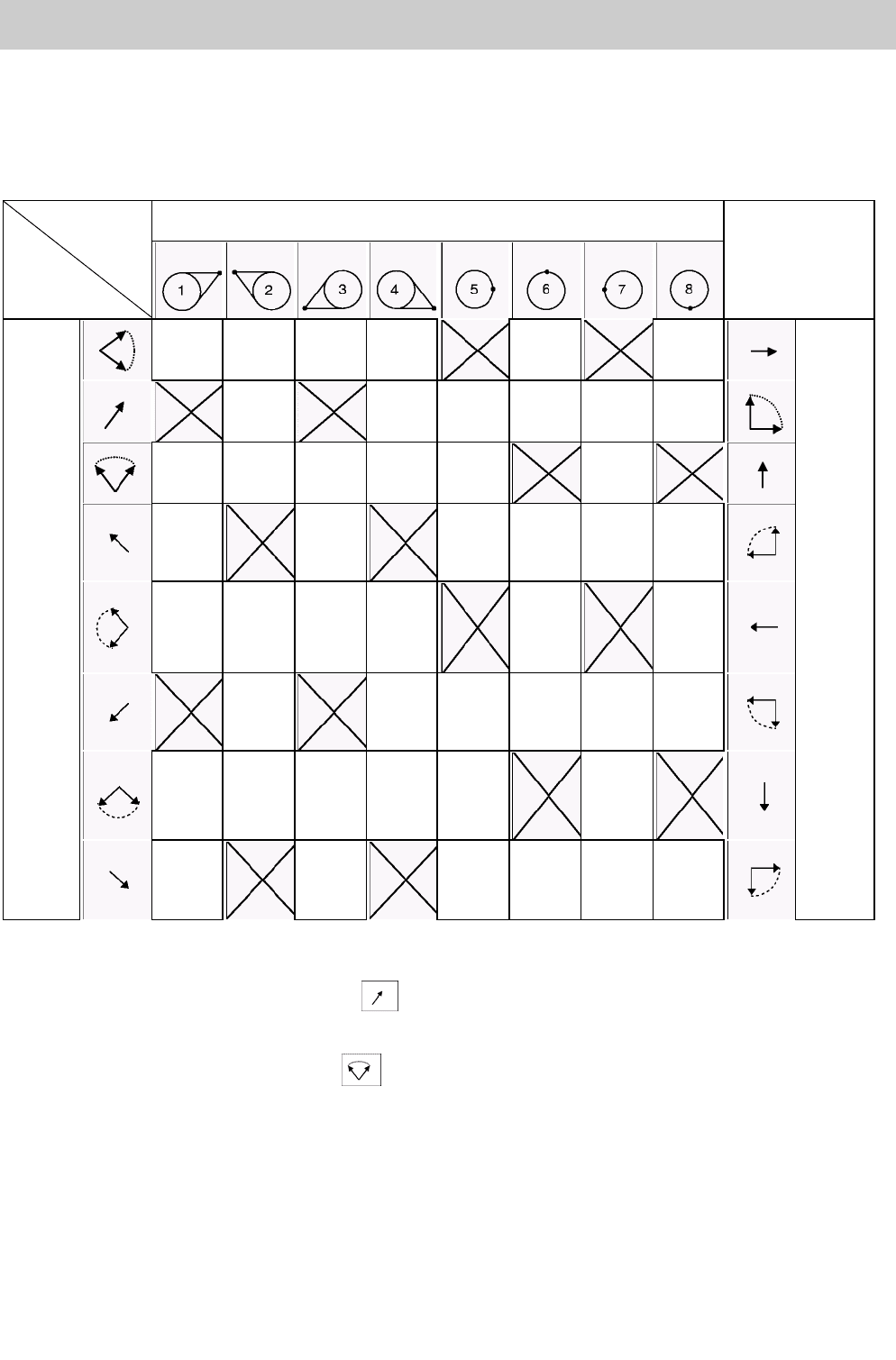
(4) Если направление коррекции в режиме коррекции на радиус вершины резца совпадает
с отметкой "x" в приведенной ниже таблице, направление соответствует предыдущему
направлению коррекции. Определение направления коррекции по векторам
вращения и точке вершины резца в команде G46
Точки вершины резца
Направление
коррекции
вершины резца
Направление
движения вершины
резца
Правое Правое Левое Левое Правое Левое
Правое Левое Левое Правое Правое Левое
Левое Правое Правое Левое Левое Правое
Левое Правое Левое Левое Правое Правое
Левое Левое Правое Правое Левое Правое
Вектор
движения
(точки
вершины
резца 1 -
4)
Левое Правое Правое Левое Левое Правое
Вектор
движения
(точки
вершины
резца 5 -
8)
Правое Левое Левое Правое Правое Левое
Левое Левое Правое Правое Левое Левое
(Примечание 1) Значение "x" в таблице указывает на то, что направление коррекции не
определено вектором движения (точками вершины резца).
(Примечание 2) Отметка '' " обозначает вектор движения в направлении под углом
45°. (Она также является основанием для определения остальных векторов
движения.)
(Примечание 3) Отметка ' " обозначает вектор движения в диапазоне от 45° и до 135°.
(Она также является основанием для определения остальных векторов
движения.)
211