Решетов С.А. Электроснабжение воздушных судов Учебник для вузов
Подождите немного. Документ загружается.

работающим
в ЭП,
управляют
по
произвольной
или
заранее заданной
программе, производя нужные операции: пуски, торможения, останов-
вы,
реверсирование, изменения частоты вращения
и т.д.
Электродви-
гатель
в
зависимости
от
назначения
ЭП
должен отвечать соответствую-"
щим требованиям
по
быстродействию, стабильности работы
на
задан-
ном режиме, простоте управления
и т.д. В
установившемся режиме
электромагнитный момент уравновешивается суммой статических
мо-
ментов нагрузки, напряжение сети — суммой падений напряжения
на
п
активных сопротивлениях участков цепи якоря:
М —
2jM
cl
-
= 0; (7=
i
=
1
п
= .S
f
ar
a
i.
Электропривод находится
в
состоянии механического
и
электрического равновесия.
При
нарушении равновесия статически
устройчивый
ЭП
перейдет
в
новое установившееся состояние, харак-
теризующееся другими значениями механических, электрических
и
тепловых величин.
Переходным процессом
в ЭП
является совокупность электрических,
механических
и
тепловых процессов, протекающих
при его
переходе
в
новое установившееся состояние. Переходный процесс
(ПП)
возникает
из-за изменения управляющего воздействия (напряжения, тока воз-
буждения), момента нагрузки
ЛТ
С
,
параметров электродвигателя
(£?а.
Ф).
Изменение электромагнитного
или
нагрузочного моментов
обусловливает механические
ПП
(изменение частоты вращения),
а из-
менение токов
в
цепи
ЭД
определяет электромагнитные
ПП и
изменя-
ет
его
нагрев.
Для протекания каждого вида
ПП
требуется время, зависящее
от
электромагнитной
(L),
механической
(J, т) и
тепловой
(С, А)
инерци-
онности электрических цепей
и
механических звеньев
ЭП.
Переходные
процессы удлиняют время работы
ЭП,
броски тока
в
цепи якоря
ЭД
создают потери электроэнергии, многократно превосходящие потери
в
установившихся режимах
и
составляющие
до 80%
всех потерь.
Им-
пульсные значения электромагнитного момента создают значительные
угловые ускорения
da/dt = MIJ и
соответствующие динамические
нагрузки, требующие необходимого запаса прочности звеньев системы
передачи момента.
Изучение
ПП с
учетом взаимного влияния всех видов процессов
весьма сложно,
а в
ряде случаев
и не
нужно.
Для
упрощения пренебре-
гают явлениями, которые
на
данный процесс практически
не
влияют.
В частности, изучая механические
ПП,
пренебрегают влиянием элект-
ромагнитных вследствие
их
быстротечности (единицы миллисекунд)
и
тепловыми из-за
их
большой длительности (десятки минут); время про-
текания механических
ПП
десятки
—
сотни миллисекунд. Электро-
магнитные
ПП
заканчиваются значительно раньше механических,
а
тепловые
за
время механического
ПП не
успевают развиться. Следо-
вательно, основные
ПП в
электроприводе механические.
78
Для оценки
ПП и
факторов, влияющих
на них,
необходимо знать
закон изменения частоты вращения ротора
ЭД во
времени
со (t) или ис-
полнительного механизма со
и-м
(t),
тока якоря
/
а
(i),
иногда тока воз-
буждения
/„ (t),
момент
на
валу двигателя
М (t), М
с
(t) или
исполни-
тельного механизма
М
и
.
м
(t),
мощность двигателя
Р
г
(t),
углы поворота
вала двигателя
а (t) или
исполнительного механизма
а
и-м
(/). Эти за-
висимости называют нагрузочными характеристиками. Характеристики
/
а
(t), М (t), Р
г
(t)
позволяют судить
о
нагреве
ЭД, а
характеристи-
ки
со (t),
со
и
.
м
(/), а (t), а
и
,
м
(t) — о
быстродействии
ЭП. Их
получают,
решая дифференциальное уравнение
ЭП,
который, строго говоря,
яв-
ляется нелинейной системой из-за нелинейностей
ЭД и
элементов сис-
темы управления.
Для
ДПТ
независимого возбуждения можно пренебречь нелиней-
ностями характеристики намагничивания, моментной характеристики
М
= / (/
а
),
зависимостью потока машины
от
тока якоря
Ф = / (/
а
).
В этом случае
ПП
можно описать линейными дифференциальными
уравнениями, которые решают
в
общем виде.
С
определенными допу-
щениями можно линеаризовать характеристики двухфазных асин-
хронных двигателей. Характеристики
ДПТ
последовательного
и
сме-
шанного возбуждения
и
трехфазных асинхронных двигателей
в
диапа-
зоне
(при s„ < 1)
изменения частоты вращения
от со„ до 0
линеаризо-
вать невозможно. Решение нелинейных дифференциальных уравне-
ний
в
общем виде сложно. Обычно такие уравнения решают численными
методами, чаще всего
с
использованием
ЭВМ. Это
позволяет решать
уравнения практически любой сложности
с
любыми нелинейностями
и необходимой точностью. Программа расчета
в
этом случае явля-
ется общим решением
для
ряда
ЭП
разной мощности,
но
одного
типа.
6.2.
УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА
С
ЭЛЕКТРОДВИГАТЕЛЕМ
ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
При выводе уравнения движения
ЭП
принималось,
что
магнитный
поток
Ф не
зависит оттока якоря
(Ф = const),
механические харак-
теристики электродвигателя
и
механизма линейны, реакция якоря
на
работу
ЭД не
влияет.
Дифференциальное уравнение движения
ЭП
получают, используя
уравнения:
равновесия моментов
M—M
C
= J (rfco/dO + (co
2
/2) (d J
(a)/da),
(6.1)
или
M
— M
c
--J
(d(o/dt);
электрического равновесия якорной цепи
ЭД
{/
=
СФсв+/
а
Яа +
*<а
(dljdt);
(6,2)
79
моментной характеристики, связывающее механические и элект-
рические величины,
М
= СФ/
а
. (6.3)
Полный момент инерции У=/
дв
+ /„.
M
/i
2
может зависеть от уг-
ла поворота вала двигателя а, когда в зависимости от а изменяется
передаточное отношение i = i (а) (например, в шатуНно-кривошипных
и кулисных механизмах).
Дифференциальное уравнение движения ЭП получают, выражая
электромагнитный момент ЭД и момент нагрузки через ток якоря. Для
этого используют уранения (6.1) и
(6.3):
/
а
=(.//СФ)
(йо>/<И) +
Л*с/СФ=(У/СФ)
{dm,'dt)
+ I
c
, (6.4)
где
/
с
= М
С
/СФ — составляющая тока якоря, обусловленная моментом нагруз-
ки
М
с
; (J/СФ) (du>/dt)— составляющая тока якоря, создающая ускорение при-
п
вода
(динамическая составляющая); / =/
дв
+ — приведенный к валу
ЭД
момент инерции.
Производная тока по времени
d
I
a
/dt=(J/CO)
(с*
2
со/Л
2
) + (1/СФ) (dM
c
/dt). (6.5)
При подстановке выражений для тока якоря из (6.4) и его произ-
водной из (6.5) в уравнение (6.2) связываются между собой электри-
ческие и механические величины, характеризующие процесс в ЭП:
и={1
а
ЛСФ) (d
2
ы/Л
2
) + (УЛа/СФ)
(rfft>/df)
+
+
С Фсо-Ь (LJC Ф) (d M
c
/dt) + Мс R
a
/C Ф.
Все члены равенства делят на СФ, а коэффициент при
d
2
a/dt
2
умножа-
ют на
R
a
/R
a
.
Выделив все члены, содержащие to и ее производные, по-
лучают
(L
a
/R
a
)
(//?
а
/С2ф2) (d*io/dP) +
(JR
a
/C*Os)
(dco/rfO + co
=
=
(7/СФ —
(L
a
/R
a
)
(Я
а
/С
2
Ф
2
) (d M
c
/dt)—R
a
M
c
/C*0*, (6.6)
где L
a
lR
a
T
a
—электромагнитная постоянная времени якорной цепи ЭД;
У/?
а
/(С
2
Ф
2
)
— Т
ы
— электромеханическая постоянная времени привода; 1//СФ~
=
со
0
— угловая скорость при идеальном холостом ходе ЭД; /?
а
/(СФ)
2
= Ь —
передаточный
коэффициент по моменту нагрузки.
С учетом принятых обозначений дифференциальное уравнение дви-
жения ЭП записывают в виде
T
a
T
u
(с*
2
со/Л
2
) + 7'
м
(da>/d() +
b>
=
KJJ—b
[7'
а
{d MJdt)+М
С
], (6.7)
где
АГ
т
=1/СФ.
По уравнению (6.7) находят закон движения ЭП при любом характе-
ре управляющего воздействия U (t) и нагрузки М
с
(t).
Иногда для решения уравнения движения удобно применять пре-
образование Лапласа, позволяющее получить решение при типовых
80
законах изменения управляющего воздействия U (t) и нагрузки М
с
(/).
Преобразуя по Лапласу уравнение
(6.7),
находят
«>{р)
= [К
а
и (p)-b(T
aP
+\) ш(0) + Г
а
Г
и
ш' (0)-
-ЬТ
а
М
с
(0)]/(Т
а
Т
ыР
Ч-Т
м
р+\),
(6.8)
где
М
с
(0) и со (0)-—начальные значения соответственно приведенного момента
нагрузки
и частоты вращения (при t — 0); со' (0) — начальное угловое ускоре-
ние
ЭП (при / = 0).
Первый член выражения (6.8) характеризует влияние на ПП управ-
ляющего воздействия U (р), второй — нагрузки М
с
(р), третий — на-
чальных условий.
Обычно электромагнитные процессы в цепи якоря заканчиваются
значительно быстрее механических, поэтому ими можно пренебречь и
считать индуктивность якорной цепи ЭД равной нулю, тогда и Т
а
«0.
Обычно постоянная времени Т
а
на порядок меньше Т
ш
и неучет Т
а
в
уравнении практически не сказывается на точности расчетов. Уравне-
ние движения привода при Т
а
= 0 будет первого порядка
Т
к
(dm/dt)+e>
=
K
w
U-b
М
с
. (6.9)
Если U =
const,
М
с
=
const,
то К
ы
U = со
0
, ЬМ
С
= Асо
с
, со„—
— Асо
с
= со
с
— установившаяся угловая скорость. Тогда уравнение
(6.9) имеет вид
r
M
(dco/<tt)
+
w
= co
c
. (6.10)
Решив уравнение
(6.10),
получим
ш
= й)
с
+(со
1
—сос) ехр
(—-t/T
M
),
ИЛИ
ш=и
с
(1—ехр ( —//Г
м
)+со
1
ехр
(—f/T
M
),
где
со, щ и со
с
—текущее, начальное и установившееся значения частоты враще-
ния
соответственно.
Зависимость тока якоря от времени при ПП получают из уравнения
равновесия моментов, используя уравнение MX со = со
0
— ЬМ. Диф-
ференцируя его, находят
da>/dt=—b(dM/dt).
(6.11)
Заменяя в уравнении равновесия моментов производную
dca/dt
ее
выражением из
(6.11)
— b (dM/dl), получаем дифференциальное урав-
нение, определяющее изменение электромагнитного момента от вре-
мени при ПП:
T
M
(da/dt)+M
= M
c
.
(6-12)
Решение этого уравнения аналогично уравнению для угловой ско-
рости:
М=М
С
+(М
1
-М
С
)
ехр (—г/Г^),
(6.13)
или
М = М
С
(1—ехр (-г/ТмН + Мхехр (-//Г
м
),
(6.14)
где
М — М (г) — текущее значение момента в ПП; М
с
— момент нагрузки.
81
Ток якоря при ПП определяют, используя решение дифференци-
ального уравнения моментов
(6.13)
или
(6.14).
Для двигателя незавн-
симого (параллельного) возбуждения М = СФ/, Ф =
const
Подста
находяг
ШеНИе
М
°
МеНТа
ЭД его вы
Р
аже
™е через ток якоря и поток,
М/) =
/с+(/,-/
с
)ехр(-*/г
м
),
(6.15)
Или
/а
(П = 1
С
(-ехр (-/'/Т
м
)) + /
1
ехр (-?/Г
м
),
(6.16)
процессе
( Р
~*
); а W
~
тек
У
щее
значение тока якоря в переходном
Из
(6.10),
(6.13)
и
(6.16)
видно, что ПП определяется электромеха-
нической постоянной времени Т
м
= У/?
а
/(сФ)«. Ее значение харак-
теризует быстродействие ЭП, с увеличением Т
м
быстродействие умень-
шается. Из выражения для Т
м
видно, что она зависит от электрических
и механических параметров двигателя: R
a
, Ф (машинной постоян-
ной с - pN/2л) и момента инерции. Если выражение для электроме-
ханической постоянной умножить и разделить на напряжение питания
Г
м
= «
а
/(СФ)==(«
а
/(Сф)
2
) (U/U) =
(JU/C4>)
{R
a
/UC<b)=J
щ
/м„,
где
(7/СФ=ш
0
.
В выражении Т
м
= /со
0
/УИ
п
все входящие в него величины меха-
нические. Однако две из них имеют электрическую природу так как
создаются взаимодействием электрических величин R
a
U и Ф Умень-
шение потока Ф и увеличение R
a
приводят к росту со
0
, уменьшению
момента М
в
и к возрастанию Т
м
.
Геометрически электромеханическая постоянная — подкасатель-
ная к кривой ПП в любой ее точке. Электромеханическую постоянную
также определяют как время разгона привода при пуске до установив-
шейся скорости под действием постоянного электромагнитного момента
равного пусковому. Электромеханическую постоянную можно оп-
ределить из рис. 6.1. Для этого нужно время достижения приводом vr-
w
B
°VW?™
^Т
0
'
95
^
Разделить на Зсо = со
с
[1 - ехр X
Х(—ЗГ
М
/Т
М
)1
= со
с
(1 — ехр (-3)) = со
с
(1—0,0498)
= 0,95со
с
.
6.3. ТИПОВЫЕ ПЕРЕХОДНЫЕ ПРОЦЕССЫ
К типовым переходным процессам (ПП) относятся пуск торможе-
ние и реверсирование.
Якорь ЭД подключают к сети, магнитный поток к моменту включе-
ния якоря уже установился (Ф =
const),
момент нагрузки постоянен
и равен УИ
С
, установившаяся угловая скорость равна со
с
При пуске
угловая скорость со
1=
0, М
х
= UCO/R
a
= М
п
(рис. 6.1 и 6 2) Уста-
новившиеся значения переменных в конце пуска следующие: со
г
= ©„-
-
b М
с
; М
с
=
const;
/
с
= М
с
/СФ (см. рис. 6.2).
82
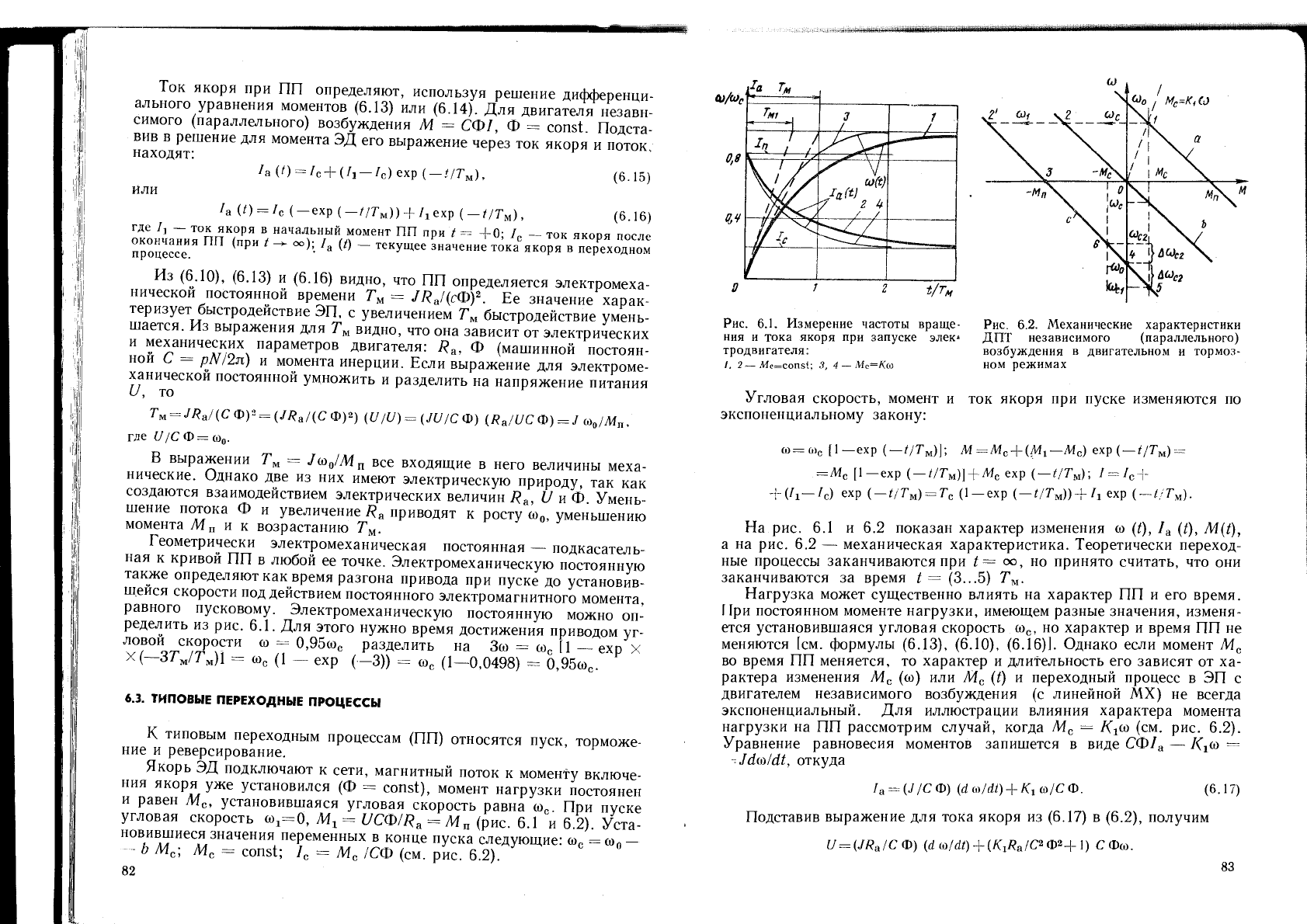
Рис.
6.1. Измерение частоты
враще-
ния
и тока якоря при запуске элек»
тродвигателя:
1,2
—
M
c
=const;
.?,
4
— Мс=К(а
Рис.
6.2. Механические характеристики
ДПТ
независимого (параллельного)
возбуждения
в двигательном и
тормоз-
ном
режимах
Угловая скорость, момент и ток якоря при пуске изменяются по
экспоненциальному закону:
ш
= 0)
с
[1—ехр
(—//Г
м
)];
М =М
С
+ (М
г
— М
с
) ехр ( — г/Г
м
) =
=
М
С
[1-ехр
(-//Г
м
)] + /И
с
ехр
(
— ЦТ
Л
);
/ /,.
+
(/! — /«.) ехр (-г/Т
м
) = Г
с
(1-ехр
(-
t
/T
M
))
+ I
1
ехр (-</Т„).
На рис. 6.1 и 6.2 показан характер изменения со (t), /
а
(t), M(t),
а на рис. 6.2 — механическая характеристика. Теоретически переход-
ные процессы заканчиваются при t = со, но принято считать, что они
заканчиваются за время t =
(3...5)
Т
ы
.
Нагрузка может существенно влиять на характер ПП и его время.
При постоянном моменте нагрузки, имеющем разные значения, изменя-
ется установившаяся угловая скорость со
с
, но характер и время ПП не
меняются [см. формулы
(6.13), (6.10),
(6.16)]. Однако если момент М
с
во время ПП меняется, то характер и длительность его зависят от ха-
рактера изменения М
с
(со) или М
с
(t) и переходный процесс в ЭП с
двигателем независимого возбуждения (с линейной MX) не всегда
экспоненциальный. Для иллюстрации влияния характера момента
нагрузки на ПП рассмотрим случай, когда М
с
— Л^со (см. рис. 6.2).
Уравнение равновесия моментов запишется в виде СФ/
а
— /<Г,со =
Jd<a/dt,
откуда
/
а
===
(J/С Ф) (d со/Л) +
К
г
<о/СФ.
(6.17)
Подставив выражение для тока якоря из
(6.17)
в
(6.2),
получим
£7 = (УЯ
а
/СФ) (dы|dt)A
r
{K
l
R
a
|C*Ф*+\) СФш.
83
Уравнение делим почленно на СФ (К+1), где
K=K,RJC
2
0
2
В ре-
зультате получим '
F
(JRa/0
+ K) С
2
Ф
2
)
(rfco/rf04~»
c
= c//(i + /<:) СФ,
или
Т
м1
(d (o/df) +
со
= со
с
,
(6.18)
где
Г
М1
=
Г
М
/(Н-/С);
ш
с
=
сУ/(1
+ Л') СФ.
Очевидно, что решение уравнения
(6.18)
имеет тот же вид что и при
постоянном моменте нагрузки, но электромеханическая постоянная в
F"
р3
?
меньше
(
см
- Р
ис
-
6
-
J
) вследствие того, что при М
с
=
/С,
со
избыточный момент, создающий ускорение
dw/dt
-= (М — М
с
) I J
при скоростях, меньших
со,,,
больше избыточного момента при М
с
===
—
const.
Понятие постоянной времени имеет смысл только для экс-
поненциального ПП, когда избыточный момент и угловое ускорение с
ростом скорости уменьшаются по линейному закону.
6.4.
ВЛИЯНИЕ ЭЛЕКТРОМАГНИТНОЙ ПОСТОЯННОЙ
НА ПЕРЕХОДНЫЙ ПРОЦЕСС
Неучет электромагнитной постоянной якорной цепи электродви-
гателя Т
а
-=
L
a
IR
a
незначительно-влияет на результаты расчетов ПП
В
^
Л
о
КТ
,
Р
л
0
т
РИВ0
^
е
'
6СЛИ Та
«
Т
«-
0бычно Т
* = (2-3) мс, а Т
ч
=
(оО...
100)
мс. В этом случае характер и время ПП в реальном электро-
приводе близки к процессам, полученным при учете только электро-
механической постоянной Т
м
. Однако увеличение Т
а
, начиная с неко-
торых значений, заметно влияет на характер и время ПП и для их рас-
чета нужно учитывать обе постоянных времени. При U =
const
и .И,.
-=
const
дифференциальные уравнения для угловой скорости и тока
якоря ЭД имеют вид:
Т
ы
Т
а
(d
2
ш/Л
2
) + Г
м
(d m/dt) + (o = K
a
U — bM
c
;
(6.19)
T
M
T
a
(d4
a
/dP)+T
w
(dI
a
/dt)
+ l
a
= I
c
.
(6.20)
Эти уравнения пригодны для анализа всех режимов работы электро-
привода с ЭД независимого (параллельного) возбуждения при Ф =
const
и М
Р
=
const.
Особенность реального ЭП состоит в том что
при подключении якоря к сети нарастание тока в нем определяется
электромагнитной постоянной Г.,, и пуск распадается на два этапа. На
первом этапе якорь неподвижен, ток нарастает до значения тока трога-
ния /
тр
—/
с
= М
С
/СФ, время нарастания определяется постоянной Т
а
процесс описывается дифференциальным уравнением
U=-UR
a
+
L&(dI
a
ldt),
(6.21)
и носит экспоненциальный характер:
U
=
(U/R
a
)
(1-ехр (-//Г
а
))=/
П
(1_ехр(-//Г
а
)).
(6.22)
84
m
Время трогания f
Tp
равно времени нарастания тока якоря до тока
трогания /
тр
- Т
а
In
(/„/(/„-Л
,.))-
Токтрогания больше /,, /
тр
>
>
/
с
= ;И
С
/СФ и соответственно время трогания несколько больше
времени нарастания тока до значения /
а
= /
с
- Это вызвано уменьше-
нием потока ЭД вследствие возникновения реакции якоря и демпфиро-
вания потока вихревыми токами, наводимыми в участках магнитной
цепи и, как следствие, отставанием электромагнитного момента от на-
растания тока якоря. По достижении током якоря значения /
тр
якорь
начинает вращаться, электромеханические и электромагнитные про-
цессы протекают одновременно. Для их анализа используют уравне-
ния
(6.19)
и
(6.20).
Оба уравнения аналогичны, следовательно, одина-
ковы и соответствующие им характеристические уравнения р
2
+
+
р/Т
а
+
1/Т
а
Т
м
= 0, корни которых
р
2
,
, = -
1
/2 Г
а
±
V^Tl-\/T
a
fZ
=
=
_ К/2 Т
м
± (1 /2
T
x
)Vh-4K,
(6-23)
где
К
Т
У
,Т
!{
.
Уравнения для угловой скорости и тока якоря имеют вид:
м(<)
= ^1 ехр
(p
2
t)i-A
2
ехр
(p
3
t)+<i>
c
;
(6.24)
!
а
(i) = B
1
ехр
(p
2
t)+B
%
ехр (p
3
t) + l
c
-
(
6
-25)
Постоянные интегрирования А
л
, Л
2
, В
г
, В
2
для каждого режима
находят отдельно по начальным значениям переменных со (0), /
а
(0) и
их производным
d<a/dt\
t=0
и
dl
a
/dt\
t=0
.
Для решения удобно применять преобразование Лапласа, упроща-
ющее нахождение постоянных интегрирования, которые определяются
при использовании начальных условий. По Лапласу уравнения для
частоты вращения и тока якоря при U —
const
и М
с
=
const
имеют
вид:
w
(р) =
(К
ю
и-ВМ
с
)/Т
а
Т
ы
р
{р* + р/Т
а
+
1/Т
а
Т
ы
);
(6.26)
/а
(р) =
/с/Га7>
№ + рШ+
1
/Г
а
Г
и
).
(6.27)
Третий корень выражений со (р) и /
а
(р) появился в результате
преобразований по Лапласу напряжения U (/) ЕП U и момен-
та нагрузки М
с
(0=[1Ш
С
,
которые при включении ЭД и начале дви-
жения возникают скачком L
\
U (t)]=U/p и L \М
С
(*)]= MJp. При
значениях
TJT
a
> 4 корни характеристического уравнения отрица-
тельные, вещественные, разные, переходный процесс апериодиче-
ский.
В процессе пуска
со
(/) = со
с
— А
х
ехр (р
2
/) +
Л
2
ехр
(p
2
t);
-А, Л, - и.,..
(6.28)
Для
Т
м
/Т
а
= 4 корни характеристического уравнения вещественные,
Рг.з =
—2/Т
м
,
ПП апериодический, устанавливающийся при
со
= со
с
.
Его характер описывается выражением
ш
(^)=(о
с
—
A
x
t ехр (р
г
{) — А
г
ехр
{p
3
t);
Л
2
= со
с
; р
2
= р
3
.
(6.29)
85
О
0,1 ,?.z t,c
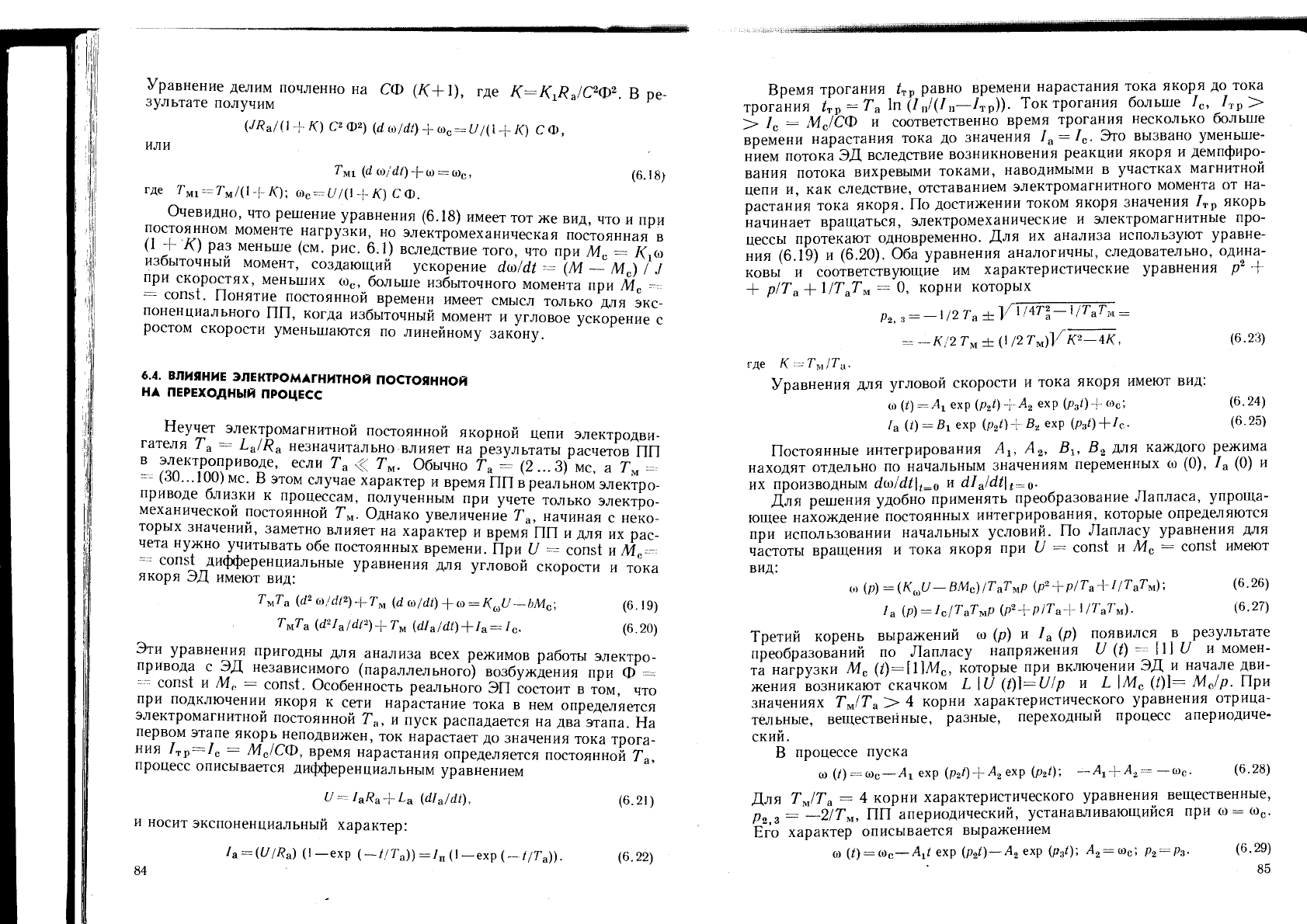
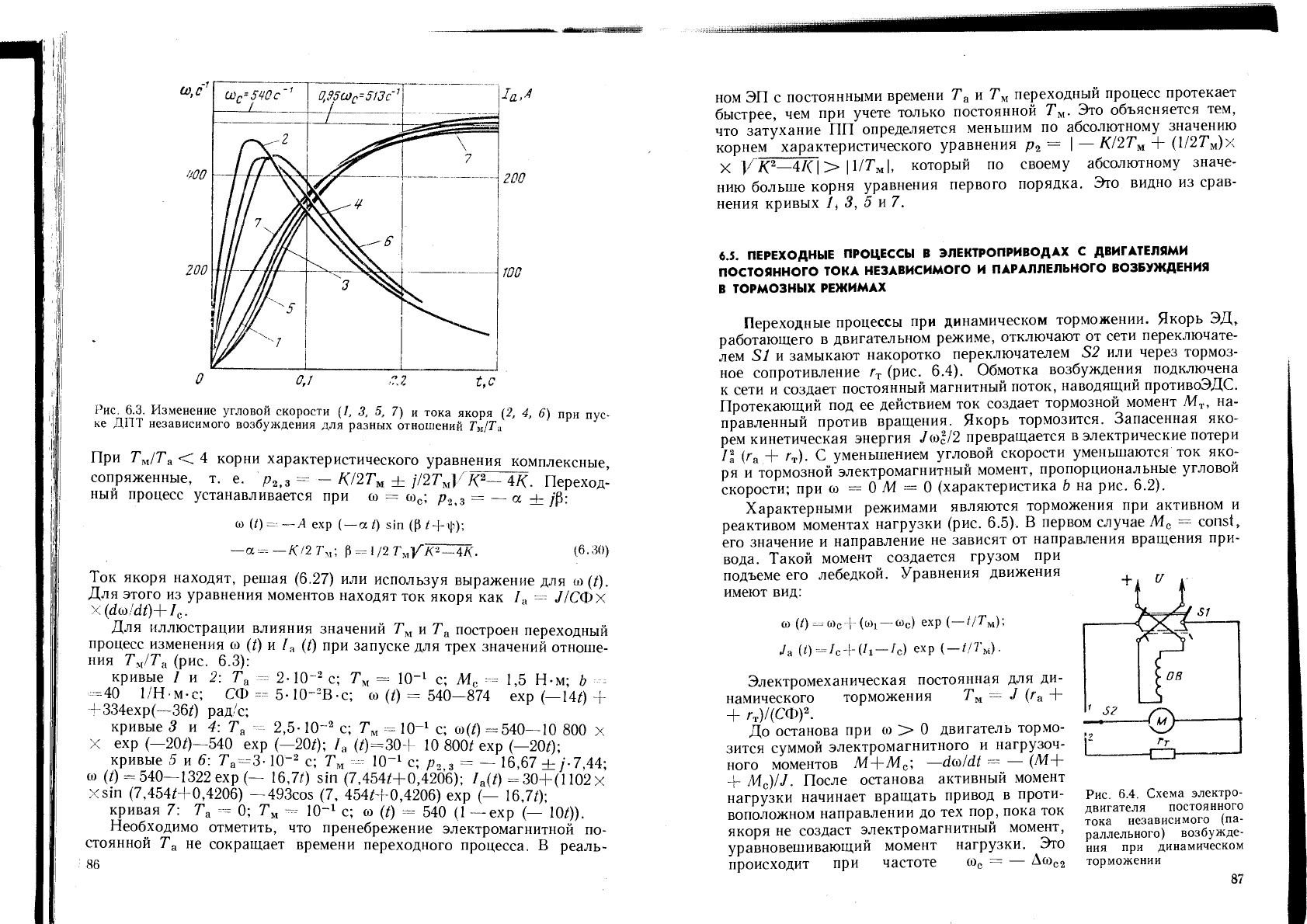
Рис.
6.3.
Изменение угловой скорости
(/, 3, 5, 7) и
тока якоря
(2, 4, 6) при
пус-
ке
ДПТ
независимого возбуждения
для
разных отношений
Т
Ж
1Т-
Л
При
Т
м
/Т
я
< 4
корни характеристического уравнения комплексные,
сопряженные,
т. е.
>
2>3
= -
Д72Г
М
±
j^T^W^K.
Переход-
ный процесс устанавливается
при со = со
с
; р
гъ
= — а ± /р
1
:
со
(/) = —Л ехр
(
—
a t) sin (р
1
<
+
ф);
-а=-К/2Г„;
I /2 7\,у~К- 4Л\ (6.30)
Ток якоря находят, решая
(6.27) или
используя выражение
для со(0-
Для этого
из
уравнения моментов находят
ток
якоря
как /., -
J/СФх
X(du/dt)+/
c
.
Для иллюстрации влияния значений
Т
м
и Т
а
построен переходный
процесс изменения
со (t) и 1
Л
(/) при
запуске
для
трех значений отноше-
ния
TJT
a
(рис. 6.3):
кривые
/ и 2: Т
а
-•= 2-Ю~
2
с; Т
м
= Ю"
1
с; М
0
= =
1,5 Н-м; Ъ -
-40 1/Н-м-с; СФ ==
5-10-
2
В-с;
со (t) = 540—874 ехр (—140 +
+
334ехр(—36/) рад/с;
кривые
3 и 4: Т
я
----
2,5-10~
2
с; Т
м
= 10"
1
с; ©(/) =540—10 800 х
X
ехр (—200—540 ехр (—200; h (0=30+ 10 800/ ехр (—200;
кривые
5 и 6:
Т
а
=3-Ю"
2
с; Г
м
- 10"
1
с; /?,
3
= — 16,67 ± /-7,44;
со
(0 = 540—1322 ехр (— 16,70 sin (7,454<+0,4206); /
а
(0 = 30+(1102
X
xsin
(7.454/+0.4206)
—
493cos
(7,
454Н-0.4206)
ехр
(—
16,70;
кривая
7: Т
а
== 0; Т
ы
10"
1
с; со (0 = 540 (1 -ехр (— 100).
Необходимо отметить,
что
пренебрежение электромагнитной
по-
стоянной
Т
а
не
сокращает времени переходного процесса.
В
реаль-
86
ном
ЭП с
постоянными времени
Т
а
и Т
м
переходный процесс протекает
быстрее,
чем при
учете только постоянной
Г
м
. Это
объясняется
тем,
что затухание
ПП
определяется меньшим
по
абсолютному значению
корнем характеристического уравнения
р
2
—
I
— К/2Т
М
+
(1/2Г
м
)х
X
VК
2
—4/CI
>
I
I/T'MI,
который
по
своему абсолютному значе-
нию больше корня уравнения первого порядка.
Это
видно
из
срав-
нения кривых
U 3, 5 и 7.
6.5.
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
В
ЭЛЕКТРОПРИВОДАХ
С
ДВИГАТЕЛЯМИ
ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО
И
ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ
В ТОРМОЗНЫХ РЕЖИМАХ
Переходные процессы
при
динамическом торможении. Якорь
ЭД,
работающего
в
двигательном режиме, отключают
от
сети переключате-
лем
S1 и
замыкают накоротко переключателем
S2 или
через тормоз-
ное сопротивление
г
т
(рис. 6.4).
Обмотка возбуждения подключена
к сети
и
создает постоянный магнитный поток, наводящий противоЭДС.
Протекающий
под ее
действием
ток
создает тормозной момент
М
г
, на-
правленный против вращения. Якорь тормозится. Запасенная яко-
рем кинетическая энергия J&Z/2 превращается
в
электрические потери
/а
(/а +
г
т)-
С
уменьшением угловой скорости уменьшаются
ток
яко-
ря
и
тормозной электромагнитный момент, пропорциональные угловой
скорости;
при со = 0М = 0
(характеристика
Ь на рис. 6.2).
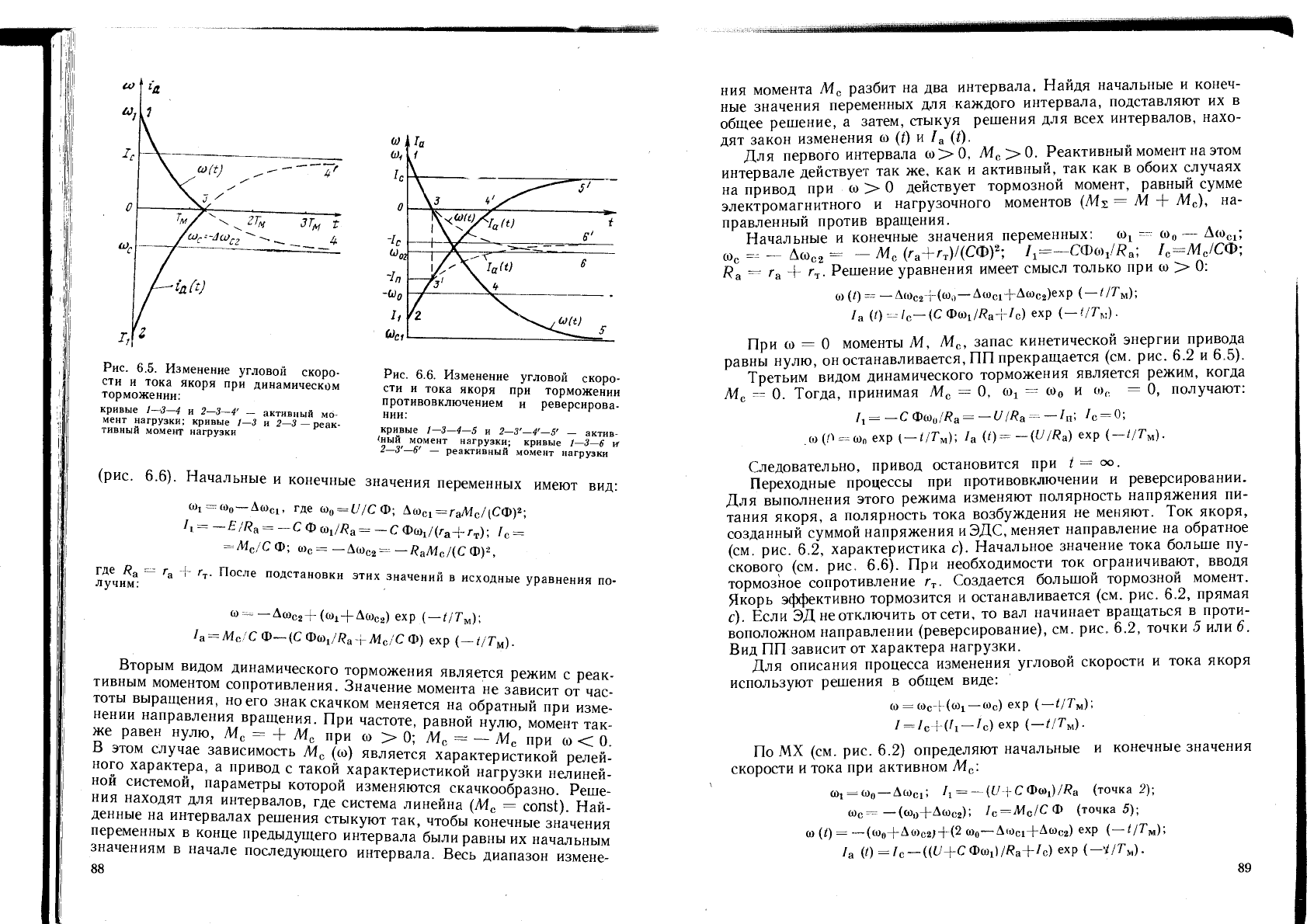
Характерными режимами являются торможения
при
активном
и
реактивом моментах нагрузки
(рис. 6.5). В
первом случае
М
с
= const,
его значение
и
направление
не
зависят
от
направления вращения при-
вода. Такой момент создается грузом
при
подъеме
его
лебедкой. Уравнения движения
имеют
вид:
со
(/) —
Wc+tco!—•
со
с
) ехр
(
—
f/7"
M
);
(0='c+(/i
— fc) ехр
{
—
t/T
№
).
Электромеханическая постоянная
для ди-
намического торможения
Т
ы
= J (г
а
+
+
г
т
)/(СФ)
2
.
До останова
при со > 0
двигатель тормо-
зится суммой электромагнитного
и
нагрузоч-
ного моментов
М+М
с
; —da/dt = — (М+
+
M
c
)/J.
После останова активный момент
нагрузки начинает вращать привод
в
проти-
воположном направлении
до тех
пор, пока
ток
якоря
не
создаст электромагнитный момент,
уравновешивающий момент нагрузки.
Это
происходит
при
частоте
со
с
= —
Асо
с2
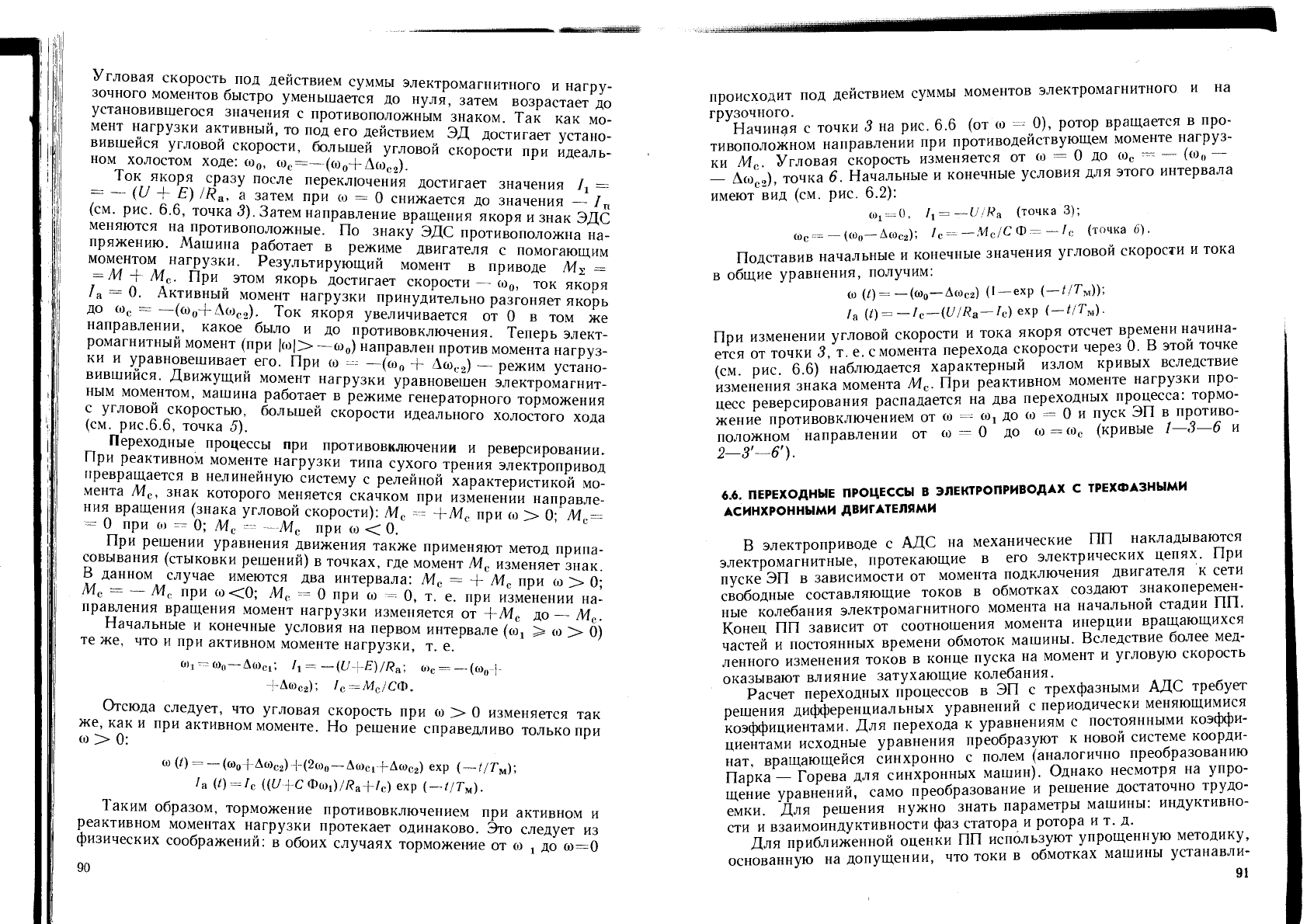
Рис.
6.4.
Схема электро-
двигателя постоянного
тока независимого
(па-
раллельного) возбужде-
ния
при
динамическом
торможении
87
л»,
Ч
7
v o>(t)
и
г
1
Рис.
6.5. Изменение угловой скоро-
сти и тока якоря при динамическом
торможении:
кривые
1-4-4 и
2-3-4'
-
активный
мо-
мент нагрузки; кривые
1—3 и 2—3 —
реак-
тивный момент нагрузки
W
h
•in
-U
о
h
„Та
1
if
1 V -
\/-\ 1„Ш
4 \.
Рис.
6.6. Изменение угловой скоро-
сти и тока якоря при торможении
противовключением и реверсирова-
нии:
кривые
1—3—4—5
и
2—3'—4'—5'
—
актив-
ный момент нагрузки; кривые
1—3—6
к
2—3'—6'
—
реактивный момент нагрузки
(рис.
6.6). Начальные и конечные значения переменных имеют вид:
Wi=:to
0
—
Дсо
С1
,
где со
0
=
(7/СФ;
Дсо
С1
=г
а
М
с
/(СФ)2;
/j
=
-£//?,
= - С ф
Й1
Д
а
= - С ©(^/(rg
+
fj;
/
с =
=
М
С
/С Ф; о)
с
= — Дсо
С2
=,— /?
а
М
с
/(СФ)*,
а + г
т
. После подстановки этих значений в исходные уравнения по-
где R
a
лучим:
со^
—
Лшсг+К
+ Лысз) ехр ( — г/Г
м
);
/а=/И
с
/СФ~(СФй)
1
//?а + Л1
с
/СФ) ехр (-г/Т
м
).
Вторым видом динамического торможения является режим с реак-
тивным моментом сопротивления. Значение момента не зависит от час-
тоты выращения, но его знак скачком меняется на обратный при изме-
нении направления вращения. При частоте, равной нулю, момент так-
же равен нулю, М
с
= + М
с
при со > 0; М
с
= ~М
С
при со < О
В этом случае зависимость М
с
(со) является характеристикой релей-
ного характера, а привод с такой характеристикой нагрузки нелиней-
ной системой, параметры которой изменяются скачкообразно Реше-
ния находят для интервалов, где система линейна (М
с
=
const)
Най-
денные на интервалах решения стыкуют так, чтобы конечные значения
переменных в конце предыдущего интервала были равны их начальным
значениям в начале последующего интервала. Весь диапазон измене-
88
ния момента М
с
разбит на два интервала. Найдя начальные и конеч-
ные значения переменных для каждого интервала, подставляют их в
общее решение, а затем, стыкуя решения для всех интервалов, нахо-
дят закон изменения со (г) и /
а
(О-
Для первого интервала со>0, М
с
>0. Реактивный момент на этом
интервале действует так же, как и активный, так как в обоих случаях
на привод при со > 0 действует тормозной момент, равный сумме
электромагнитного и нагрузочного моментов (M
z
= М + М
с
), на-
правленный против вращения.
Начальные и конечные значения переменных: со
х
•
со
0
— А<о
с1
;
со
с
=-- - Дсо
с2
= - М
с
(г
а
+г
т
)/(СФ)
2
; /
С
=М
С
/СФ;
Ra =
г
&
+
г
т Решение уравнения имеет смысл только при со > 0:
о) (/) — —
A(o
C2
-f
(со
0
— Д<о
с1
+Дсо
С2
)ехр (
—//Т
м
);
/а
(0---'с
— (СФан/ЛаЧ /с) ехр ( — (/Т
ь:
).
При со = 0 моменты М, М
с
, запас кинетической энергии привода
равны нулю, он останавливается, ПП прекращается (см. рис. 6.2 и 6.5).
Третьим видом динамического торможения является режим, когда
М
с
= 0. Тогда, принимая М
с
= 0, щ = со
0
и co
f
, = 0, получают:
/, = — С Фсо„//?
а
= —
UIRa
-In- /с = 0;
(о
п
ехр ( — t/T
K
); /
а
(г)=-(<7/Яа)
ехр (-//Г
м
).
Следовательно, привод остановится при t =
оо.
Переходные процессы при противовключении и реверсировании.
Для выполнения этого режима изменяют полярность напряжения пи-
тания якоря, а полярность тока возбуждения не меняют. Ток якоря,
созданный суммой напряжения и ЭДС, меняет направление на обратное
(см.
рис. 6.2, характеристика с). Начальное значение тока больше пу-
скового (см. рис. 6.6). При необходимости ток ограничивают, вводя
тормозное сопротивление г
т
. Создается большой тормозной момент.
Якорь эффективно тормозится и останавливается (см. рис. 6.2, прямая
с).
Если ЭД не отключить от сети, то вал начинает вращаться в проти-
воположном направлении (реверсирование), см. рис. 6.2, точки 5 или 6.
Вид ПП зависит от характера нагрузки.
Для описания процесса изменения угловой скорости и тока якоря
используют решения в общем виде:
co = co
c
-f (он — со
с
) ехр (—t/T
M
);
/ = /
c
+(7i—/с) ехр ( —г/Г
м
).
По MX (см. рис. 6.2) определяют начальные и конечные значения
скорости и тока при активном М
с
:
Й>,=СО
0
—Дсо
С1
; /i = — (сЧ-СФа>1)//?
а
(точка 2);
со
с
= — Оо+Дсосг); /
С
=ЛТ
0
/СФ (точка 5);
ш (t) = --(со
0
+До)
с2
И (
2 ш
о~Д<о
С
1+Дсо
С2
) ехр ( — t/T
M
);
/
а
(/)=/
с
_(((7+СФш
1
)/Я
а
+/с)
ехр (—
Ч1Т
Ы
).
89
Угловая скорость
под
действием суммы электромагнитного
и
нагру-
зочного моментов быстро уменьшается
до
нуля, затем возрастает
до
установившегося значения
с
противоположным знаком.
Так как мо-
мент нагрузки активный,
то под его
действием
ЭД
достигает устано-
вившейся угловой скорости, большей угловой скорости
при
идеаль-
ном холостом ходе:
со
0
,
со
с
=- (со
0
+
Асо
с
,).
Р
-
T
°n,*l
0p
Jl
/п
РЗЗу
"
0СЛе пе
Р
екЛ1
°ченйя достигает значения
L =
/7„ \} ак'
Ra
' 1
затем
"Р
и (0
=
0
снижается
до
значения
— /
п
(см.
рис. о.о,
точка
3).
Затем направление вращения якоря
и
знак
ЭДС
меняются
на
противоположные.
По
знаку
ЭДС
противоположна
на-
пряжению. Машина работает
в
режиме двигателя
с
помогающим
М
°^
Н
1
ОМ
л/
аГ
г?
уЗКИ
-
Рез
У
л
ьтирующий момент
в
приводе
М
2
=
М
+ М При
этом якорь достигает скорости
— со
0
, ток
якоря
/
а
-
Активный момент нагрузки принудительно разгоняет якорь
до
со
с
(CO
0
+AGJ
C2
).
Ток
якоря увеличивается
от 0 в том же
направлении, какое было
и до
противовключения. Теперь элект-
ромагнитный момент
(при |со|>
-
й,
0
) направлен против момента нагруз-
ки
и
уравновешивает
его. При со - ~(
щ
+
Дй)
) _
режим уст
^
0
.
вившийся. Движущий момент нагрузки уравновешен электромагнит-
ным моментом, машина работает
в
режиме генераторного торможения
с угловой скоростью, большей скорости идеального холостого хода
(см.
рис.6.6, точка
5).
Переходные процессы
при
противовключении
и
реверсировании
11ри
реактивном моменте нагрузки типа сухого трения электропривод
превращается
в
нелинейную систему
с
релейной характеристикой
мо-
мента
М
с
,
знак которого меняется скачком
при
изменении направле-
ния вращения (знака угловой скорости):
М
с
==
+М
Р
при
со
>
О
М =-
=
0 при о - 0; М
с
= —М
с
при
со
< 0. '
с
При решении уравнения движения также применяют метод припа-
совывания (стыковки решений)
в
точках,
где
момент
М
с
изменяет знак
В данном случае имеются
два
интервала:
М
с
= + М
с
при
со
> О"
М
с
М
с
при
со<0;
М,, = 0 при со •= 0, т. е. при
изменении
на-
правления вращения момент нагрузки изменяется
от +М
С
до — М
с
.
Начальные
и
конечные условия
на
первом интервале
(со, >
со
> 0)
те
же, что и при
активном моменте нагрузки,
т. е.
о>,-=м„
—Дш
С1
;
/, =
—((/+£)//?
а
;
о)
с
= —
(м
0
-|-
+Асо
С2
);
/
С
=Л}
С
/СФ.
Отсюда следует,
что
угловая скорость
при
со
> 0
изменяется
так
же
как и при
активном моменте.
Но
решение справедливо только
при
со
> 0:
1
со(0 = —
К+До)
С2
)+(2со
0
—
Дш
С1
+А«
С2
)
ехр
(~-г/Г
м
);
/а
(0 = 'с
(((/+СФш,)//?
а
+ /
с
) ехр ( — i/T
M
).
Таким образом, торможение противовключением
при
активном
и
реактивном моментах нагрузки протекает одинаково.
Это
следует
из
физических соображений:
в
обоих случаях торможен-ие
от со , до о=0
90
происходит
под
действием суммы моментов электромагнитного
и на
ГРУ
ШчТная с
точки
3 на рис. 6.6 (от со =- 0),
ротор вращается
в про-
тивоположном направлении
при
противодействующем
моменте
нагруз-
ки
М,
Угловая скорость изменяется
от со — 0 до со
с
— (со,,
—
Лсо
с2
), точка
6.
Начальные
и
конечные условия
для
этого интервала
имеют
вид (см. рис. 6.2):
сОх-0,
/,=
—1//Я
а
(точка 3);
сос==-(со
0
-Лсо
С2
);
/
с
=
-Мс/СФ=-/о (точка
б).
Подставив начальные
и
конечные значения угловой скорости
и
тока
в общие уравнения, получим:
со
(0=—К—Дсо
с2
)
(1—ехр
(—t/T
M
))\
/а
(*) = —/с
—(iV/#a
—'с) ехр
(
—
tlT
w
).
При изменении угловой скорости
и
тока якоря отсчет времени начина-
ется
от
точки
3, т. е. с
момента перехода скорости через
0. В
этой точке
(см
рис 6 6)
наблюдается характерный излом кривых вследствие
изменения знака момента
М
с
. При
реактивном моменте нагрузки про-
цесс реверсирования распадается
на два
переходных процесса: тормо-
жение противовключением
от со = со, до со - 0 и
пуск
ЭП в
противо-
положном направлении
от со = 0 до со = со
с
(кривые
l—J—Ь
и
2—3'—6').
6.6.
ПЕРЕХОДНЫЕ ПРОЦЕССЫ
В
ЭЛЕКТРОПРИВОДАХ
С
ТРЕХФАЗНЫМИ
АСИНХРОННЫМИ
ДВИГАТЕЛЯМИ
В электроприводе
с АДС на
механические
ПП
накладываются
электромагнитные, протекающие
в его
электрических цепях.
При
пуске
ЭП в
зависимости
от
момента подключения двигателя
к
сети
свободные составляющие токов
в
обмотках создают знакоперемен-
ные колебания электромагнитного момента
на
начальной стадии
ill.
Конец
ПП
зависит
от
соотношения момента инерции вращающихся
частей
и
постоянных времени обмоток машины. Вследствие более мед-
ленного изменения токов
в
конце пуска
на
момент
и
угловую скорость
оказывают влияние затухающие колебания.
паЛ
^
г
Расчет переходных процессов
в ЭП с
трехфазными
АДС
требуег
решения дифференциальных уравнений
с
периодически меняющимися
коэффициентами.
Для
перехода
к
уравнениям
с
постоянными коэффи-
циентами исходные уравнения преобразуют
к
новой системе коорди-
нат вращающейся синхронно
с
полем (аналогично преобразованию
Парка
—
Горева
для
синхронных машин). Однако несмотря
на
упро-
щение уравнений, само преобразование
и
решение достаточно трудо-
емки.
Для
решения нужно знать параметры машины: индуктивно-
сти
и
взаимоиндуктивности
фаз
статора
и
ротора
и т. д.
Для приближенной оценки
ПП
используют упрощенную методику,
основанную
на
допущении,
что
токи
в
обмотках машины устанавли-
91
ваются быстрее,
чем
протекают механические процессы,
а
электро-
мост
Н
ь
ИТН
м/^°
МеНТ ЗЗВИСИТ Т0ЛЬК
°
°
Т
уГЛ0В0Й СК
°Р°
С
™'
т. е
завиТи
ZnnvjZ}
}
ИМебТ
Т0Т Ж6
ВИД
'
ЧТО и
"Р"
этическом режиме. Такое
™«£
н
„
в
«
ПОЗВОЛяет
использовать
для
расчета механических
ПП
уравнение равновесия моментов
и
некоторые соотношения, характер-
ные
для
асинхронных машин.
F р
Для
вывода уравнения движения привода используют-
уравнение равновесия моментов
М—
M
C
= J
(dm/dt);
зависимость момента
от
скольжения (формулу Клосса)
M=r.2M
m
/(s
K
/s+s/s
K
);
(6
.
3!)
зависимость угловой скорости ротора
от
скольжения
<0
=
СОх
(1 —S)
.
(
6
_
321
нул5
ЛЯ
УПр
°
ЩеНИЯ
Вывода момент
сопротивления
М
с
считают равным
/с
^пользуя уравнение равновесия моментов, выражения
(6
31)
и
(о.32),
получают:
v ;
2M
m
/(s/s
K
+s
K
/s)
=
—J
(ds/dt)
или
dt
= —(J
coj/2M
m
)
(s/s
K
~\sJs)
ds =
=
—(7'м/2) (s/s
K
+s
K
/s)ds.
(6.33)
norfniST
J(
°
l/A
k
П
°
*°
pMe
аналогич
но электромеханической
том
ин
IT™'
°
НО
°"Р
еделяет
в
Р
емя
-
за
которое
ЭП
с
момен-
момента
М
Вп^Тпп™
бЫ Д
°
уГЛ
°
ВОЙ
СКорости
^
под
Действием
момента
М
т
.
Время
ПП
находят, интегрируя выражение
(6.33):
/=
-(Г
м
/2)
J
(s/s
K
+s
K
/s)
ds =
(Т
к
/2) ((s!~sl)/2s
K+
s
K
In (
Sl
/s
2
)). (6.34)
s
ско^ии
3
Кпи
т
°
T
ЗНаЧеНИЙ
Гм
'
S
«>
началь
ного
Sl
и
конечного
^ скольжении. Критическое скольжение,
при
котором время
ПП ми-
нимально, называют оптимальным скольжением.
Его
находят иссле-
дуя
на
экстремум выражение
(6.34):
"ходят, иссле
5
к,
0
=УИ-*1)/2
1п
(Vs,).
СКОЛЬХРИТГ™
6
°
бЩСе
ДЛЯ
ВСеХ
ПП
-
0п
™мальное критическое
ж?
нип
Т
Д
,
"
УСКа на
*°Д
ят
- подставляя пределы изменения сколь-
жения
от
s
x
= 1
до
s
2
=
0,05:
%,о=У(5?-«1)/2
1п
(S!/s
2
)
=
1/(1^-0,052)/2
In
(1/0,05)
=
=
V\I2
In 20
=
0,408.
92
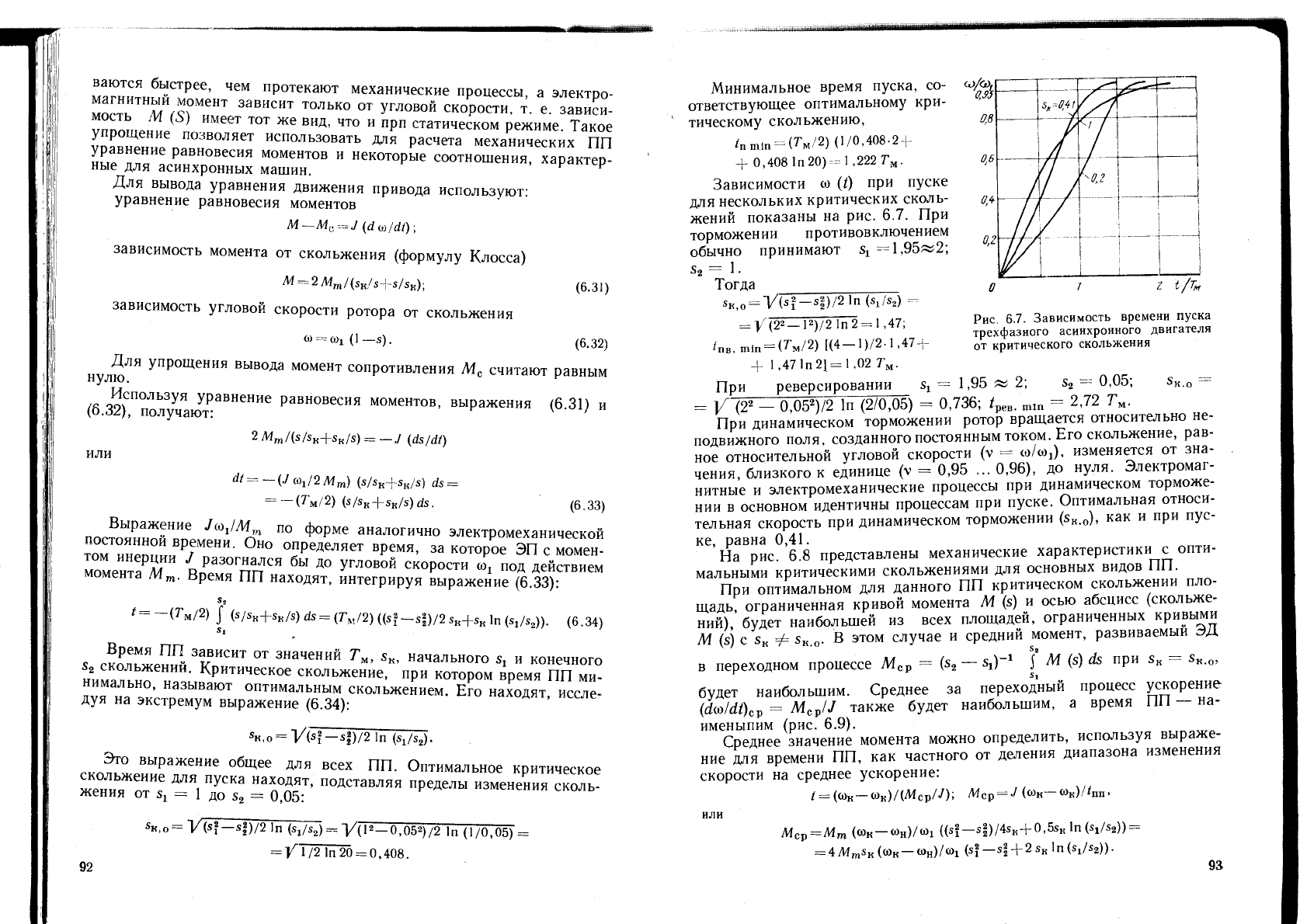
Минимальное время пуска,
со-
ответствующее оптимальному кри-
тическому скольжению,
*nmln
=
(7V2) (1/0,408-2
+
+
0,408
In 20)-1,222
Т
м
.
Зависимости
со
(t) при
пуске
для нескольких критических сколь-
жений показаны
на
рис. 6.7.
При
торможении противовключением
обычно принимают
s
x
=1,95«2;
s
2
=
1
•
Тогда
SKi0
=
V(
S
2_s|)/2
In
(
Sl
/s
2
)
-
=
У(22_12)/2
1п2
= 1,47;
;n
B
,min
=
(^M/2)
[(4-1)/2.1,47
+
+
1,47
In 2]
=
1,02
Г
м
.
При реверсировании
s
x
0,6
'
i
1
0.2
j
/
I t/T„
Рис.
6.7.
Зависимость времени пуска
трехфазного асинхронного двигателя
от критического скольжения
0,05;
=
1,95 « 2; s
2
_
У(2
2
—
0,05
2
)/2Тп
(2/0,05)
=
0,736; /
рев
.
mln
=
2,72
Т
ы
.
При динамическом торможении ротор вращается относительно
не-
подвижного поля, созданного постоянным током.
Его
скольжение, рав-
ное относительной угловой скорости
(v
==
со/со.), изменяется
от
зна-
чения, близкого
к
единице
(v =
0,95
...
0,96),
до
нуля. Электромаг-
нитные
и
электромеханические процессы
при
динамическом торможе-
нии
в
основном идентичны процессам
при
пуске. Оптимальная относи-
тельная скорость
при
динамическом торможении
(s
K
.
0
), как
и
при
пус-
ке,
равна
0,41.
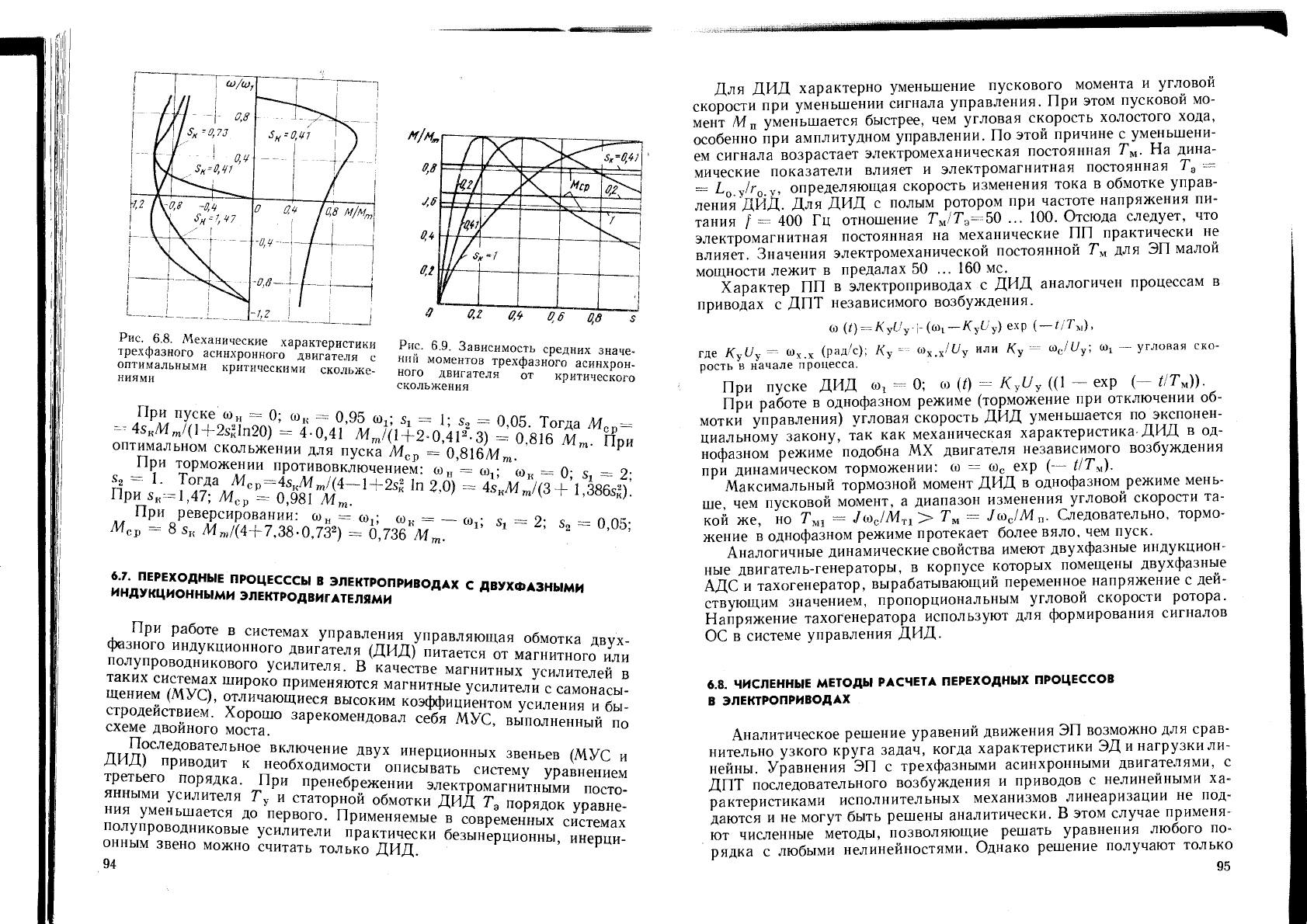
На
рис.
6.8
представлены механические характеристики
с
опти-
мальными критическими скольжениями
для
основных видов
ПП.
При оптимальном
для
данного
ПП
критическом скольжении пло-
щадь, ограниченная кривой момента
М (s) и
осью абсцисс (скольже-
ний),
будет наибольшей
из
всех площадей, ограниченных кривыми
М
(s)
с s
K
ф s
K
.
0
. В
этом случае
и
средний момент, развиваемый
в переходном процессе
M
cv
= (s
2
- s^"
1
? М
(s) ds
при s
K
=
s„.
0
,
будет наибольшим. Среднее
за
переходный процесс ускорение
время
ПП
на-
(dco/dOcp
=
M
<=v
/J
также б
УД
ет
наибольшим,
а
именыпим
(рис. 6.9).
tI
„
0
w
0
Среднее значение момента можно определить, используя выраже-
ние
для
времени
ПП,
как
частного
от
деления диапазона изменения
скорости
на
среднее ускорение:
*
=
(со„
—
со„)/(М
ср
//);
M
CV
= J
(сок—со„)/г
пп
,
или
М
ср
= М
т
(шк-сон)/©!
((sf-sl)/4s
K
+
0,5
S
„ln(s
1
/s
2
))
=
=
4
M
m
s
K
(ш
к
-ы
н
)/щ
(s? -sl + 2 s
K
In
(sjs
2
)).
93.
оптимальном скольжении
для
пуска
М
ср
=
О
816М
Р
При торможении противовключением: со
н
'= со,-""©
п- ч - 9-
6.7.
ПЕРЕХОДНЫЕ ПРОЦЕСССЫ
В
ЭЛЕКТРОПРИВОДАХ
С
ДВУХФАЗНЫМИ
ИНДУКЦИОННЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ ДВУХФАЗНЫМИ
А™,"
РЗбОТе
В
системах
Управления управляющая
обмотка
двух-
фазного индукционного двигателя
(ДИД)
питается от магнитного или
полупроводникового
усилителя.
В
качестве
магнитныГ^ил^лей
в
ZZum7n
п
ИР0К
°
Пр
™
еНЯЮТСЯ
ма
™™ьге
усилит^Гс'
мшасы
с^ооде^т^иСм'
°
х
Т
^
чаЮЩИеСЯ
ВЫСОКИМ
коэффициентом усиления и
бы-
сТеГдвГнГго мо°с
Р
тТ
0
3ареКОМеН
*
овал
«**
МУС,
выполненный по
ЛИт
СЛ
ппГ
ательное
включение двух инерционных звеньев
(МУС и
ДИД)
приводит
к
необходимости описывать систему уравнением
7шы1\?Т
№а
-
Т
ПРИ
пренеб
Р<^нии
электромагнитньГипос
ТО
янными усилителя
Г
у
и статорной обмотки
ДИД
Г
э
порядок уоавне
ния
уменьшается до
первого.
Применяемые
в
совре^ыГси^ах
полупроводниковые
усилители практически
безынерционны иГепци
онным
звено
можно
считать только
ДИД
'«ерционны, инерци-
94
Для
ДИД
характерно уменьшение пускового момента
и
угловой
скорости
при
уменьшении сигнала управления.
При
этом пусковой
мо-
мент
М
п
уменьшается быстрее,
чем
угловая скорость холостого хода,
особенно
при
амплитудном управлении.
По
этой причине
с
уменьшени-
ем сигнала возрастает электромеханическая постоянная
Т
ы
. На
дина-
мические показатели влияет
и
электромагнитная постоянная
Т
э
=
=
L
0 y
/r
0 у
,
определяющая скорость изменения тока
в
обмотке управ-
ления
ДЙД
Для
ДИД
с
полым ротором
при
частоте напряжения
пи-
тания
/ 400 Гц
отношение TJT
a
=50
... 100.
Отсюда следует,
что
электромагнитная постоянная
на
механические
ПП
практически
не
влияет. Значения электромеханической постоянной
Г
м
для
ЭП
малой
мощности лежит
в
предалах
50 ... 160
мс.
Характер
ПП в
электроприводах
с ДИД
аналогичен процессам
в
приводах
с
ДПТ
независимого возбуждения.
со
(t) =
KyUy
r
(щ —
К
у
и
у
)
ехр
(
—г/Т
5|
),
где
КуНу
-
шх.х
(РЯД/с);
/С
у
w
x
.
x
/tfy
или
*У
= ^
Ш
У'
ш
^ ~
У
ГЛОВаЯ
СК0_
рость в начале
процесса.
При пуске
ДИД со
г
- 0; to (t) =
K
y
U
y
((1
— ехр (—
t!T
M
))
При работе
в
однофазном режиме (торможение
при
отключении
об-
мотки управления) угловая скорость
ДИД
уменьшается
по
экспонен-
циальному закону,
так как
механическая характеристика
ДИД в од-
нофазном режиме подобна
MX
двигателя независимого возбуждения
при динамическом торможении:
со = со
с
ехр (
t/T
M
).
Максимальный тормозной момент
ДИД
в
однофазном режиме мень-
ше
чем
пусковой момент,
а
диапазон изменения угловой скорости
та-
кой
же, но Т
ш
=
Усо
с
Ш
т1
>
Т
ы
=
/со
с
Ш
п
. Следовательно, тормо-
жение
в
однофазном режиме протекает более вяло,
чем
пуск.
Аналогичные динамические свойства имеют двухфазные индукцион-
ные двигатель-генераторы,
в
корпусе которых помещены двухфазные
АДС
и
тахогенератор, вырабатывающий переменное напряжение
с
дей-
ствующим значением, пропорциональным угловой скорости ротора.
Напряжение тахогенератора используют
для
формирования сигналов
ОС
в
системе управления
ДИД.
6.8.
ЧИСЛЕННЫЕ МЕТОДЫ РАСЧЕТА ПЕРЕХОДНЫХ ПРОЦЕССОВ
В ЭЛЕКТРОПРИВОДАХ
Аналитическое решение уравений движения
ЭП
возможно
для
срав-
нительно узкого круга задач, когда характеристики
ЭД и
нагрузки
ли-
нейны. Уравнения
ЭП с
трехфазными асинхронными двигателями,
с
ДПТ последовательного возбуждения
и
приводов
с
нелинейными
ха-
рактеристиками исполнительных механизмов линеаризации
не
под-
даются
и не
могут быть решены аналитически.
В
этом случае применя-
ют численные методы, позволяющие решать уравнения любого
по-
рядка
с
любыми нелинейностями. Однако решение получают только
95
для одной системы
с
конкретными значениями параметров.
Для
аналп
за работы привода удается рассмотреть большое число вариантов.
Все численные методы основаны
на
переходе
от
дифференциальных
уравнений
к
уравнениям
в
конечных приращениях. Решение находят
для каждого промежутка изменения независимой переменной, внут-
ри которого система считается линейной. Значения переменных
в
конце
предыдущего промежутка являются начальными значениями
для по-
следующего промежутка.
Для
получения полного решения припасо
вывают (сшивают) решения
на
отдельных промежутках.
Для расчета часто используют методы пропорций
и
последователь-
ных интервалов.
Метод пропорций применяют, когда момент нагрузки постоянен
или зависит
от
угловой скорости исполнительного механизма
\М
С
-
=
const;
М
с
=
/(&>)].
Для
построения переходного процесса нужно
знать механические характеристики двигателя
М (со),
исполнитель-
ного механизма
М
с
(со) и
момент инерции привода
J. При
выборе числа
и значений интервалов
Асо
;
, на
которые разбивают весь диапазон изме-
нения скорости, учитывают характер кривых
М (со) и М
с
(со).
Внутри
каждого интервала Асо
г
разность моментов считают постоянной
и
рав-
ной
ее
среднему значению
на
интервале АМ
/-ер
.
Среднее ускорение
на
интервале пропорционально среднему
мо-
менту,
а
время А^
=
У(Асо
г
/АМ
г
ср
); t
t
= + Atr,
со
г
=
(о
г
_
1
Ч
1
Асо
г
.
Суммируя приращения угловой скорости
и
времени, находят зависи-
мость
со (t).
При использовании метода пропорций задачу можно решать гра-
фически.
Для
этого исходя
из
диапазонов изменения переменных
и
размеров чертежа выбирают масштабы угловой скорости
р
ш
,
времени
ц
(
и
момента
ц
м
.
Тогда пропорцию АМ
г
.
ор
/У
=
Лсо
;
/А^- записывают
в
виде: (Асо
г
/и.
ш
): (A//ii
t
)=(AM
;
/p
M
):(A//p
7
)
и
1х
м
/р,
7
=р
ш
/р,. Откуда
масштаб момента инерции
р, = p;p
M
/|-W В
качестве примера
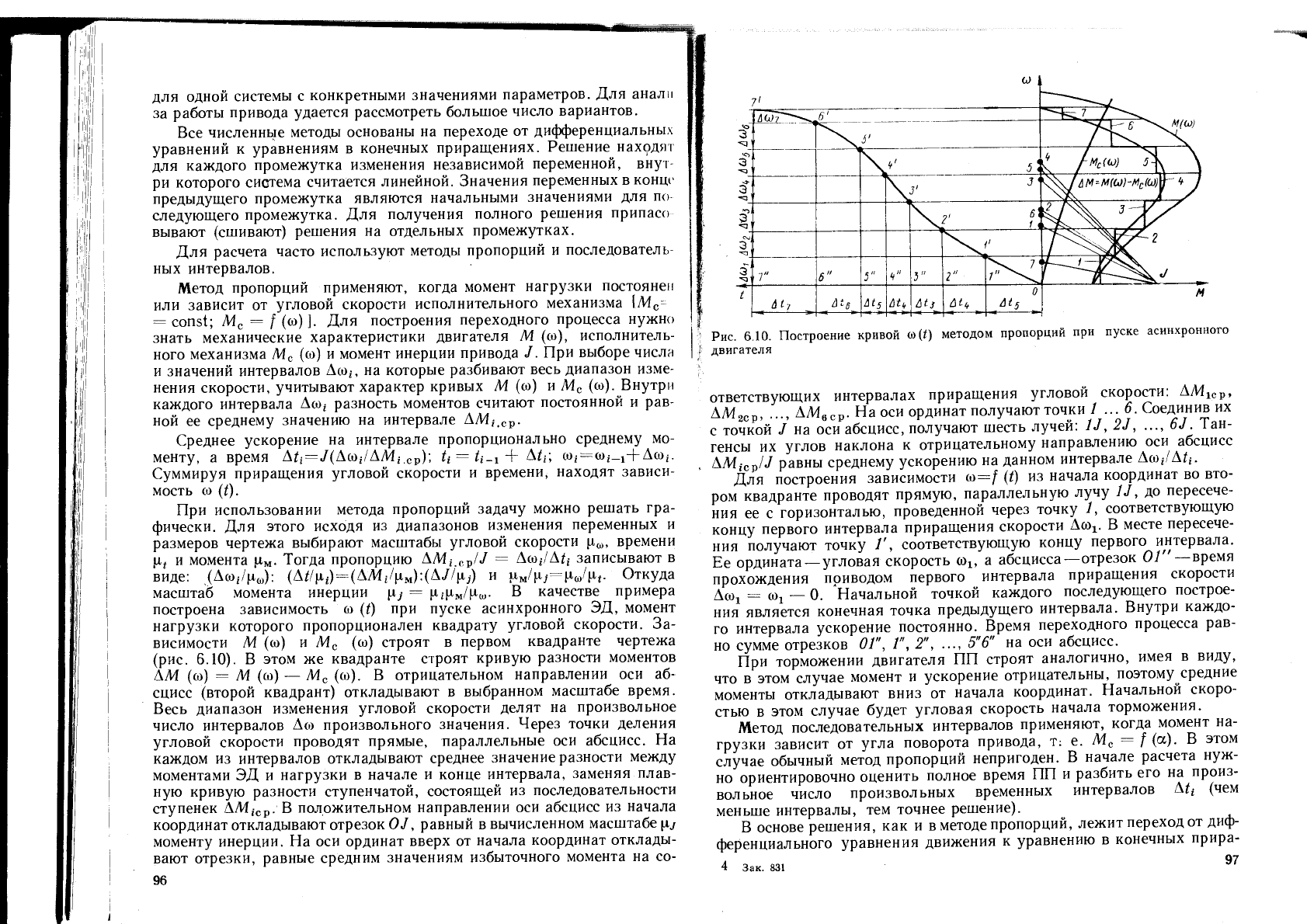
построена зависимость
со (t) при
пуске асинхронного
ЭД,
момент
нагрузки которого пропорционален квадрату угловой скорости.
За-
висимости
М (со) и М
с
(со)
строят
в
первом квадранте чертежа
(рис.
6.10). В
этом
же
квадранте строят кривую разности моментов
AM
(со) = М (со) — М
с
(со). В
отрицательном направлении
оси аб-
сцисс (второй квадрант) откладывают
в
выбранном масштабе время.
Весь диапазон изменения угловой скорости делят
на
произвольное
число интервалов
Ао>
произвольного значения. Через точки деления
угловой скорости проводят прямые, параллельные
оси
абсцисс.
На
каждом
из
интервалов откладывают среднее значение разности между
моментами
ЭД и
нагрузки
в
начале
и
конце интервала, заменяя плав-
ную кривую разности ступенчатой, состоящей
из
последовательности
ступенек
AM
icp
.
В
положительном направлении
оси
абсцисс
из
начала
координат откладывают отрезок ОУ, равный
в
вычисленном масштабе
[ij
моменту инерции.
На оси
ординат вверх
от
начала координат отклады-
вают отрезки, равные средним значениям избыточного момента
на со-
96
ответствующих интервалах приращения угловой скорости: АМ
1ср
,
АМ
2СР
, АМ
вср
.
На оси
ординат получают точки
/ ... 6.
Соединив
их
с точкой
J на оси
абсцисс, получают шесть лучей:
1J, 2J, 67.
Тан-
генсы
их
углов наклона
к
отрицательному направлению
оси
абсцисс
AM
ic
JJ
равны среднему ускорению
на
данном интервале Асо
г
/А^.
Для построения зависимости
со=/ (t) из
начала координат
во
вто-
ром квадранте проводят прямую, параллельную лучу
1J, до
пересече-
ния
ее с
горизонталью, проведенной через точку
1,
соответствующую
концу первого интервала приращения скорости
Ащ. В
месте пересече-
ния получают точку
Г,
соответствующую концу первого интервала.
Ее ордината—угловая скорость
щ, а
абсцисса
—
отрезок
01"
—-время
прохождения поиводом первого интервала приращения скорости
Асо
х
— со, — 0.
'Начальной точкой каждого последующего построе-
ния является конечная точка предыдущего интервала. Внутри каждо-
го интервала ускорение постоянно. Время переходного процесса рав-
но сумме отрезков
01", Г, 2", 5"6" на оси
абсцисс.
При торможении двигателя
ПП
строят аналогично, имея
в
виду,
что
в
этом случае момент
и
ускорение отрицательны, поэтому^средние
моменты откладывают вниз
от
начала координат. Начальной скоро-
стью
в
этом случае будет угловая скорость начала торможения.
Метод последовательных интервалов применяют, когда момент
на-
грузки зависит
от
угла поворота привода,
Т: е. М
с
= / (а). В
этом
случае обычный метод пропорций непригоден.
В
начале расчета нуж-
но ориентировочно оценить полное время
ПП и
разбить
его на
произ-
вольное число произвольных временных интервалов
At
t
(чем
меньше интервалы,
тем
точнее решение).
В основе решения,
как и в
методе пропорций, лежит переход
от
диф-
ференциального уравнения движения
к
уравнению
в
конечных прира-
97
4 Зак. 831