Решетов С.А. Электроснабжение воздушных судов Учебник для вузов
Подождите немного. Документ загружается.

элементом
(РЭ). В
остальном функциональные схемы одинаковы.
На
вход суммирующего усилителя
СУ
поступают сигналы <У
ВХ
,
U„ „ и
<7
lt
.
3
.
Выходной сигнал
СУ
подается
на
МДИ, который преобразует
сигнал <7,..
у
в
последовательность импульсов, следующих
с
постоянной
частотой. Длительность импульсов
У
ы
пропорциональна
(7
С
а частота выбирается
на
порядок ниже частоты питания
ЭД.
Сигнал
^м.д.и поступает
на
предварительный усилитель
ПУ,
который
в за-
висимости
от
знака суммарного сигнала
U
z
•--
<7
ВХ
- - U
n
„ — U
K ;i
на входе
СУ
обеспечивает срабатывание силовых переключателей
СП1
или СП2. При
вращении ротора
ЭД
перемещается
и
движок
од-
ного
из ПП.
Движение продолжается, пока <У
Г
ф 0. При
изменении
знака
£/v
переключают СП,
а
обмотки
ЭД
меняются местами
по
отношению
к
конденсатору
С, что
приводит
к
изменению направления
вращения.
При релейном управлении
(с
заменой МДИ
на РЭ) СП! или СП2
включаются, когда
\U
C
ср
где
(7,
ср
сигнал срабатывания
РЭ.
Выходной сигнал
РЭ
поступает
на ПУ,
который
в
зависимости
от
знака <У
с
.
у
включает
СП1 или СП2.
Релейные следящие приводы (РСП) нашли широкое применение,
в
том
числе
в
электрогидравлических системах управления закрылка-
ми,
в
рулевых приводах автопилота,
в
дистанционных системах управ-
ления агрегатами АД.
РСП
являются наиболее рациональными
с
точ-
ки зрения простоты, габаритных размеров, массы
и к. п. д.
Если
в ка-
честве исполнительного
ЭД
использовать асинхронный двигатель,
то
одновременно повышается ресурс
и
надежность привода. Поэтому при-
менение
РСП с
исполнительными
ЭД
переменного тока особенно пер-
спективно. Современные быстродействующие бесконтактные пере-
ключающие устройства обеспечивают получение малых амплитуд авто-
колебаний (доли градуса),
а
следовательно, высокую точность воспро-
изведения медленно изменяющихся входных сигналов. Быстродействие
релейных приводов обеспечивается тем,
что
при отработке рассогласо-
вания
к
приводу может быть подведено полное напряжение питания.
Рис.
7.12. Схема следящей системы с дискретным управлением
118
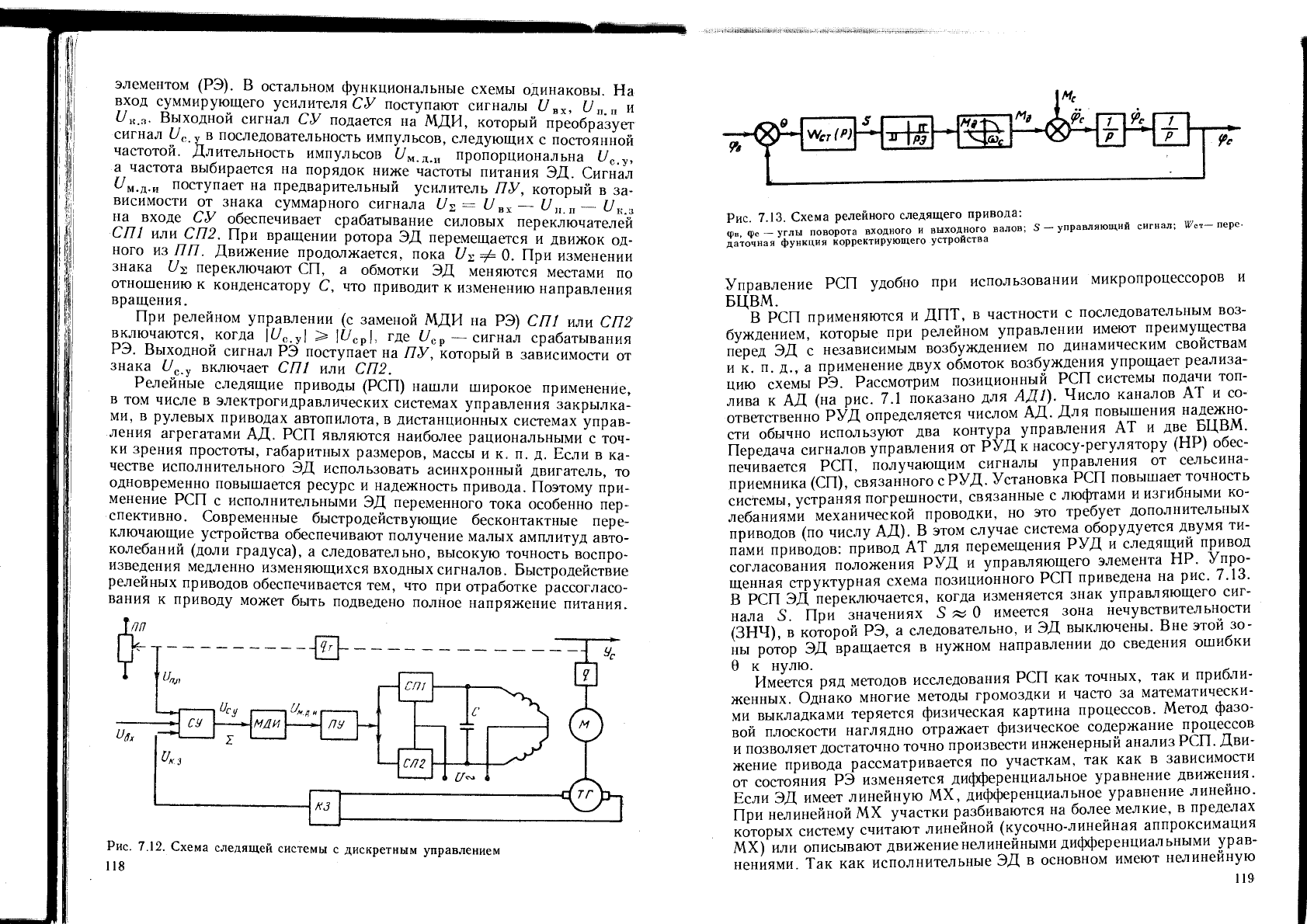
Рис 7 13 Схема релейного следящего привода:
ш„
фс -
углы поворота входного
и
выходного валов;
S -
управляющий сигнал;
Vt/ст-
перс
даточная функция корректирующего устройства
Управление
РСП
удобно
при
использовании микропроцессоров
и
БЦВМ.
В
РСП
применяются
и
ДПТ,
в
частности
с
последовательным воз-
буждением, которые
при
релейном управлении имеют преимущества
перед
ЭД с
независимым возбуждением
по
динамическим свойствам
и
к п д а
применение двух обмоток возбуждения упрощает реализа-
цию схемы
РЭ.
Рассмотрим позиционный
РСП
системы подачи топ-
лива
к АД (на рис. 7.1
показано
для АД1).
Число каналов
АТ и со-
ответственно РУД определяется числом АД.
Для
повышения надежно-
сти обычно используют
два
контура управления
AI и две
ЬЦИМ.
Передача сигналов управления
от
РУД
к
насосу-регулятору
(HP)
обес-
печивается
РСП,
получающим сигналы управления
от
сельсина-
приемника (СП), связанного с РУД. Установка РСП повышает точность
системы устраняя погрешности, связанные
с
люфтами
и
изгибными
ко-
лебаниями механической проводки,
но это
требует дополнительных
приводов (по числу АД).
В
этом случае система оборудуется двумя
ти-
пами приводов: привод АТ
для
перемещения
РУД и
следящий привод
согласования положения
РУД и
управляющего элемента
HP.
Упро-
щенная структурная схема позиционного РСП приведена
на
рис.
IЛ6.
8
РСП
ЭД
переключается, когда изменяется знак управляющего сиг-
нала
5 При
значениях
S « 0
имеется зона нечувствительности
(ЗНЧ)
в
которой РЭ,
а
следовательно,
и ЭД
выключены. Вне этой
зо-
ны ротор
ЭД
вращается
в
нужном направлении
до
сведения ошибки
9
к
нулю.
л
,
Имеется
ряд
методов исследования РСП
как
точных,
так и
прибли-
женных Однако многие методы громоздки
и
часто
за
математически-
ми выкладками теряется физическая картина процессов. Метод фазо-
вой плоскости наглядно отражает физическое содержание процессов
и позволяет достаточно точно произвести инженерный анализ PCI
1.
Дви-
жение привода рассматривается
по
участкам,
так как в
зависимости
от состояния
РЭ
изменяется дифференциальное уравнение движения.
Если
ЭД
имеет линейную MX, дифференциальное уравнение линейно.
При нелинейной MX участки разбиваются
на
более мелкие,
в
пределах
которых систему считают линейной (кусочно-линейная аппроксимация
MX)
или
описывают движение нелинейными дифференциальными урав-
нениями.
Так как
исполнительные
ЭД в
основном имеют нелинейную
119
MX,
которая не может быть заменена небольшим числом прямых ис-
пользуют графический метод построения по участкам.
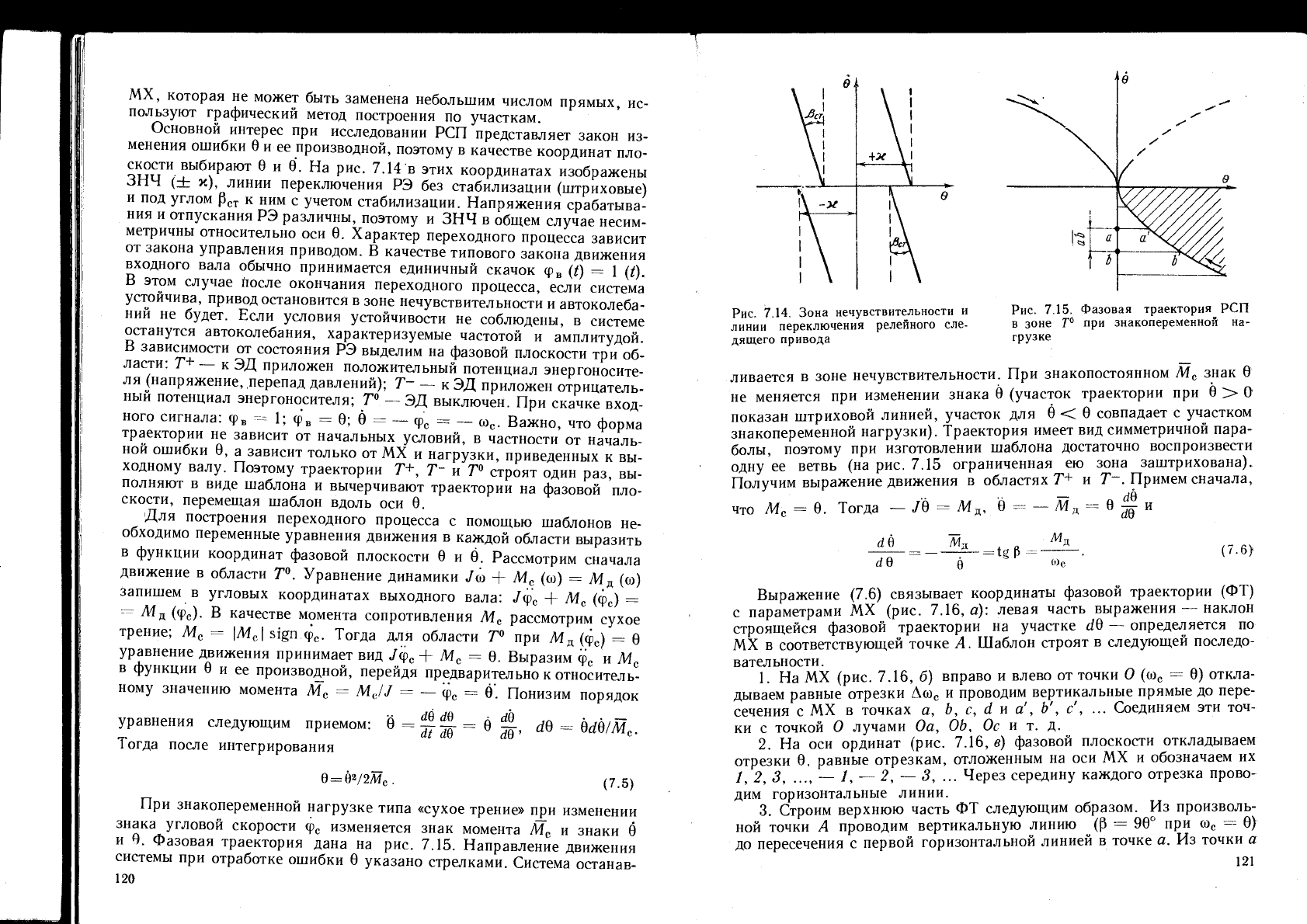
Основной интерес при исследовании РСП представляет закон из-
менения ошибки 0 и ее производной, поэтому в качестве координат пло-
скости выбирают 0 и 0. На рис. 7.14 в этих координатах изображены
с$НЧ
(± х), линии переключения РЭ без стабилизации (штриховые)
и под углом р
ст
к ним с учетом стабилизации. Напряжения срабатыва-
ния и отпускания РЭ различны, поэтому и ЗНЧ в общем случае несим-
метричны относительно оси 0. Характер переходного процесса зависит
от закона управления приводом. В качестве типового закона движения
входного вала обычно принимается единичный скачок ср
в
(/) = 1 (г)
В этом случае После окончания переходного процесса, если система
устойчива, привод остановится в зоне нечувствительности и автоколеба-
нии не будет. Если условия устойчивости не соблюдены, в системе
останутся автоколебания, характеризуемые частотой и амплитудой
зависимости от состояния РЭ выделим на фазовой плоскости три об-
ласти: Т+ — к ЭД приложен положительный потенциал энергоносите-
ля (напряжение, перепад давлений); Т~ — к ЭД приложен отрицатель-
ный потенциал энергоносителя; 7° — ЭД выключен. При скачке вход-
ного сигнала:
Фв
= 1; ф
в
= 0; в = -
Фс
= - со
с
. Важно, что форма
траектории не зависит от начальных условий, в частности от началь-
ной ошибки 0, а зависит только от MX и нагрузки, приведенных к вы-
ходному валу. Поэтому траектории Т+, Т~ и Т° строят один раз, вы-
полняют в виде шаблона и вычерчивают траектории на фазовой пло-
скости, перемещая шаблон вдоль оси 0.
Для построения переходного процесса с помощью шаблонов не-
обходимо переменные уравнения движения в каждой области выразить
в функции координат фазовой плоскости 0 и 0. Рассмотрим сначала
движение в области 7°. Уравнение динамики Усо + М
с
(со) = М
д
(со)
запишем в угловых координатах выходного вала: /ф
с
+ М
с
(ср
с
) =
=
Ж
д
(ф
с
).
В качестве момента сопротивления М
с
рассмотрим сухое
трение; М
с
= \М
С
\
sign
Фс
. Тогда для области Г° при М
л
(ср
с
) = 0
уравнение движения принимает вид Уср
с
+ М
с
= 0. Выразим
Фс
и М
с
в функции 0 и ее производной, перейдя предварительно к относитель-
ному значению момента М
с
= MJJ = — ф
с
= в'. Понизим порядок
уравнения следующим приемом: 0 =^-~ = 0 ^ d0 == Ш/М
dt dv dB '
с
*
1огда после интегрирования
в
= 6»/2Л?
с
.
(
7.5)
При знакопеременной нагрузке типа «сухое трение» при изменении
знака угловой скорости ф
с
изменяется знак момента АГ
С
и знаки 0
и 0. Фазовая траектория дана на рис. 7.15. Направление движения
системы при отработке ошибки 0 указано стрелками. Система останав-
120
\ I 1
+АГ
\
1
\ I 1
К в
!\
К в
Рис.
7.14. Зона нечувствительности и
линии переключения релейного сле-
дящего привода
Рис.
7.15. Фазовая траектория РСП
в зоне Г° при знакопеременной на-
грузке
ливается в зоне нечувствительности. При знакопостоянном М
с
знак 0
не меняется при изменении знака Э (участок траектории при 0 > О
показан штриховой линией, участок для 0 < 0 совпадает с участком
знакопеременной нагрузки). Траектория имеет вид симметричной пара-
болы, поэтому при изготовлении шаблона достаточно воспроизвести
одну ее ветвь (на рис. 7.15 ограниченная ею зона заштрихована).
Получим выражение движения в областях Т+ и Т~. Примем сначала,
п
db
что
М
с
= 0. Тогда — /0 = М
}
da
dQ
Ми
=
tgp
/И,
dQ
(7.6)
Выражение (7.6) связывает координаты фазовой траектории (ФТ)
с параметрами MX (рис. 7.16, а): левая часть выражения —- наклон
строящейся фазовой траектории на участке dQ — определяется по
MX
в соответствующей точке А. Шаблон строят в следующей последо-
вательности.
1.
На MX (рис. 7.16, б) вправо и влево от точки О (со
с
= 0) откла-
дываем равные отрезки Асо
с
и проводим вертикальные прямые до пере-
сечения с MX в точках а, Ь, с, d и а', Ь', с', ... Соединяем эти точ-
ки с точкой О лучами Оа, Ob, Ос и т. д.
2. На оси ординат (рис. 7.16, с?) фазовой плоскости откладываем
отрезки 0, равные отрезкам, отложенным на оси MX и обозначаем их
1, 2, 3, .... — 1,-2, — 3, ... Через середину каждого отрезка прово-
дим горизонтальные линии.
3. Строим верхнюю часть ФТ следующим образом. Из произволь-
ной точки А проводим вертикальную линию (6 = 90° при со
с
= 0)
до пересечения с первой горизонтальной линией в точке а. Из точки а
121
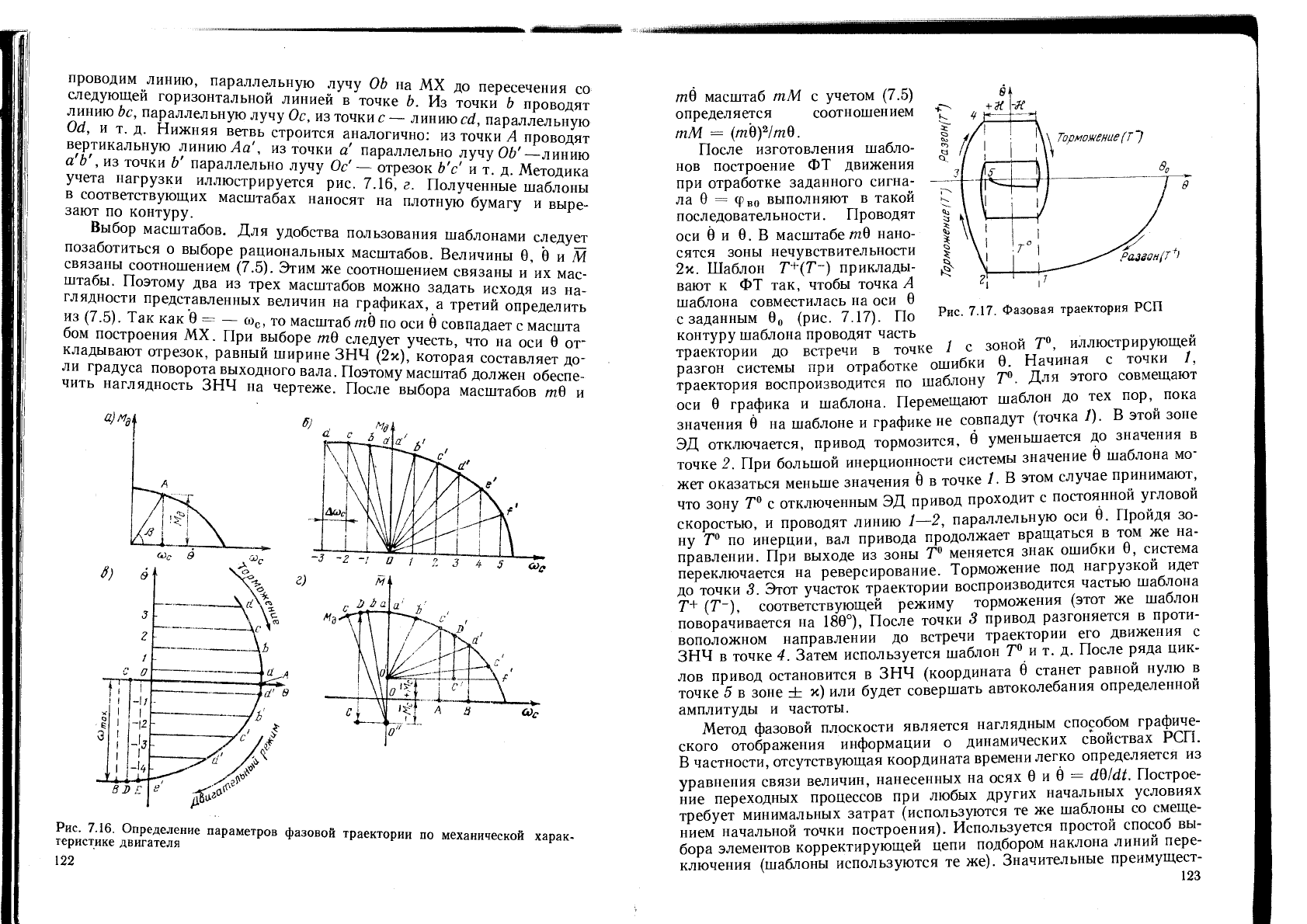
проводим линию, параллельную лучу Ob на MX до пересечения со
следующей горизонтальной линией в точке Ъ. Из точки Ь проводят
линию be, параллельную лучу Ос, из точки с - линию ей, параллельную
Ш, и т. д. Нижняя ветвь строится аналогично: из точки А проводят
вертикальную линию А а', из точки а' параллельно лучу Об'-линию
a b , из точки b параллельно лучу Ос' - отрезок Ь'с' и т. д Методика
учета нагрузки иллюстрируется рис. 7.16, г. Полученные шаблоны
в соответствующих масштабах наносят на плотную бумагу и выре-
зают по контуру.
v
Выбор масштабов. Для удобства пользования шаблонами следует
позаботиться о выборе рациональных масштабов. Величины 0 0 и М
связаны соотношением
(7.5).
Этим же соотношением связаны и их мас-
штабы. Поэтому два из трех масштабов можно задать исходя из на-
глядности представленных величин на графиках, а третий определить
£L
(7
'
5)
'
ТЗК КЗК
«лГ 7Г
№с
' ™
масштаб mQ
"о оси 0 совпадает с масшта
бом построения MX. При выборе тЬ следует учесть, что на оси 0 от-
кладывают отрезок, равный ширине ЗНЧ (2х), которая составляет до-
ли градуса поворота выходного вала. Поэтому масштаб должен обеспе-
чить наглядность ЗНЧ на чертеже. После выбора масштабов т0 и
теристике двигателя™
6 параметров
Ф
азовой
траектории по механической харак-
122
Разгон
р'^
Рис.
7.17. Фазовая траектория РСП
/л0 масштаб тМ с учетом (7.5)
определяется соотношением
тМ =
(m0)
2
/m0.
После изготовления шабло-
нов построение ФТ движения
при отработке заданного сигна-
ла 9 = фво выполняют в такой
последовательности. Проводят
оси 0 и 0. В масштабе/п0 нано-
сятся зоны нечувствительности
2х. Шаблон Т+(Т~) приклады-
вают к ФТ так, чтобы точка А
шаблона совместилась на оси 0
с заданным 0„ (рис.
7.17).
По
контуру шаблона проводят часть иллюстрирующей
ГзгоТ
Р
системы ТиТтра^Г ошибки" Начиная с
Р
ТО
Хи /,
т^ае^
Т
°-
ДЛЯ ЭТ0Г
°
С
°
ВМеЩаЮТ
оси 0 графика и шаблона. Перемещают шаблон до тех пор,_пока
значения 0 на шаблоне и графике не совпадут (точка /). В этой зоне
ЭД отключается, привод тормозится, 0 уменьшается до значения в
точке 2. При большой инерционности системы значение 0 шаблона мо-
жет оказаться меньше значения 0 в точке 1. В этом случае принимают,
что зону Т° с отключенным ЭД привод проходит с постоянной угловой
скоростью, и проводят линию 1-2, параллельную оси 0. Пройдя зо-
ну Г" по инерции, вал привода продолжает вращаться в том же на-
правлении. При выходе из зоны Г° меняется знак ошибки 0, система
переключается на реверсирование. Торможение под нагрузкой идет
до точки 3 Этот участок траектории воспроизводится частью шаблона
Т+ (Т-) соответствующей режиму торможения (этот же шаблон
поворачивается на 180°), После точки 3 привод разгоняется в проти-
воположном направлении до встречи траектории его движения с
ЗНЧ в точке 4. Затем используется шаблон Т° и т. д. После ряда цик-
лов привод остановится в ЗНЧ (координата 0 станет равной нулю в
точке 5 в зоне ± х) или будет совершать автоколебания определенной
амплитуды и частоты.
Метод фазовой плоскости является наглядным способом графиче-
ского отображения информации о динамических свойствах PU1.
В частности, отсутствующая координата времени легко определяется из
уравнения связи величин, нанесенных на осях 0 и 0 =
dQ/dt.
Построе-
ние переходных процессов при любых других начальных условиях
требует минимальных затрат (используются те же шаблоны со смеще-
нием начальной точки построения). Используется простои способ вы-
бора элементов корректирующей цепи подбором наклона линии пере-
ключения (шаблоны используются те же). Значительные преимущест-
123
ва метод также дает
и при
исследовании установившихся состояний,
выборе параметров системы, обеспечивающих минимальное время
переходного процесса
или
минимум расхода энергии.
Рассмотрим методику расчета времени переходного процесса
и
умень-
шения автоколебаний системы. Расчет связан
с
определением времени
перехода системы
из
одного состояния
(0^ 0J в
другое
(0
2
, 0
2
). Это
время зависит
от
динамического момента
и
рассчитывается по-разно-
му
для
различных участков
ФТ.
Один
из
универсальных методов рас-
чета основан
на
использовании соотношения
0 = dQ/dt,
откуда
/ =
9
.2
j_
=
j Q dQ.
Поэтому если построить зависимость
1/0 от 0, то
площадь
под кривой между любыми двумя Точками равна времени движения
на
этом интервале. Практически метод используется редко,
так как
тре-
бует дополнительного построения кривой
1/0 и
расчета площадей.
Кроме того,
в
точках
0 = 0
кривая
1/0
имеет разрыв,
что
создает
до-
полнительные трудности.
В общем случае используется графоаналитический метод, совме-
щающий расчет
с
построением шаблона
(см. рис. 7.16, г). Из
уравнения
движения непосредственно следует,
что At =
/Ао)/(М
д
— М
с
) или
в принятых относительных единицах:
At =
Асо/(ЛГ
д
— М
с
).
Выразим
At
через отрезки
А В и CD' на рис. 7.16, г: At =
(ABmQ)/{CDmQ).
Рассчитанные значения
At
наносят
на
контур шаблона
в
соответствую-
щих интервалах.
.При
увеличении
со
с
динамический момент (разность
м
я
— М
с
)
уменьшается^ расчет
At
затрудняется. Учитывая,
что при
малой разности
М
д
— М
с
угловая скорость
на
интервале практически
постоянна, время непосредственно определяется
из
соотношения
At =
dQIdQ
=
(BEmQ)/(CDmQ)
(см. рис. 7.16, в).
Для определения времени движения
в
зоне
7° ось 0 ФТ
делится
на
равные интервалы, например
об = ~ 0
тах
(см. рис. 7.15).
Через раз-
меченные точки проводят линии
аа', bb',
параллельные
оси 0, до пе-
ресечения
с
контуром
ФТ.
Времена отработки интервалов ошибки оди-
наковы
и
определяются
из
соотношения
М
с
= ёI = dQ/dt.
Переходя
к
приращениям
в
обозначениях
рис. 7.15,
получим
At (ah) = ^- =
_
М
с
—
abmQ/M
c
.
Интервалы
А^
наносятся
на
шаблон
в
точках пересечения
горизонтальных линий
аа, bb с
контуром шаблона. Расчет времени
при
0 = const
производится,
как и для
пологих областей
Т+ (Т~).
Время
переходного процесса определяется суммированием интервалов вре-
мени, нанесенных
на
контуре шаблонов. Если система устойчива, вре-
мя суммируется
до
пересечения
ФТ
линии
0
внутри области
Т°. Ес-
ли система имеет автоколебания,
то
определяется время цикла
/„ и
амплитуда автоколебаний
(по оси 0).
Частота автоколебаний
/
0
= XIt .
124
Ц
ZZ
1j>,
ФЧ8
<Р
-
WcM
-
РЭ
+
с
Кл
РЭ
\
РЭ
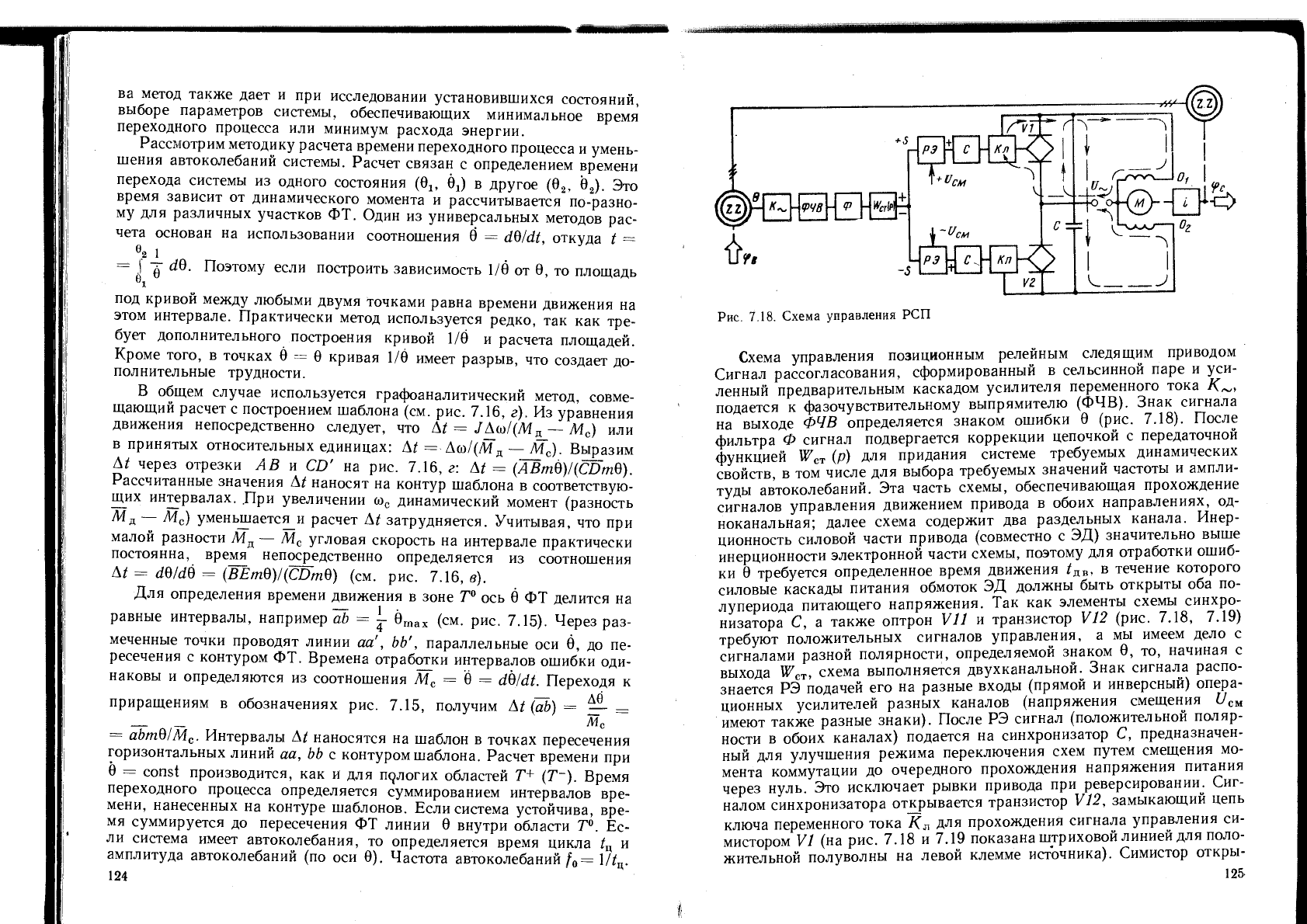
Рис.
7.18.
Схема управления
РСП
Схема управления позиционным релейным следящим приводом
Сигнал рассогласования, сформированный
в
сельсинной паре
и
уси-
ленный предварительным каскадом усилителя переменного тока
К„,
подается
к
фазочувствительному выпрямителю (ФЧВ). Знак сигнала
на выходе
ФЧВ
определяется знаком ошибки
0 (рис. 7.18).
После
фильтра
Ф
сигнал подвергается коррекции цепочкой
с
передаточной
функцией
W
CT
(р) для
придания системе требуемых динамических
свойств,
в том
числе
для
выбора требуемых значений частоты
и
ампли-
туды автоколебаний.
Эта
часть схемы, обеспечивающая прохождение
сигналов управления движением привода
в
обоих направлениях,
од-
ноканальная; далее схема содержит
два
раздельных канала. Инер-
ционность силовой части привода (совместно
с ЭД)
значительно выше
инерционности электронной части схемы, поэтому
для
отработки ошиб-
ки
0
требуется определенное время движения
/
дв
, в
течение которого
силовые каскады питания обмоток
ЭД
должны быть открыты
оба по-
лупериода питающего напряжения.
Так как
элементы схемы синхро-
низатора
С, а
также оптрон
VII и
транзистор
VI2 (рис. 7.18, 7.19)
требуют положительных сигналов управления,
а мы
имеем дело
с
сигналами разной полярности, определяемой знаком
0, то,
начиная
с
выхода
W
CT
,
схема выполняется двухканальной. Знак сигнала распо-
знается
РЭ
подачей
его на
разные входы (прямой
и
инверсный) опера-
ционных усилителей разных каналов (напряжения смещения
U
cu
имеют также разные знаки). После
РЭ
сигнал (положительной поляр-
ности
в
обоих каналах) подается
на
синхронизатор
С,
предназначен-
ный
для
улучшения режима переключения схем путем смещения
мо-
мента коммутации
до
очередного прохождения напряжения питания
через нуль.
Это
исключает рывки привода
при
реверсировании. Сиг-
налом синхронизатора открывается транзистор
V12,
замыкающий цепь
ключа переменного тока
К
л
для
прохождения сигнала управления
си-
мистором
VI (на рис. 7.18 и 7.19
показана штриховой линией
для
поло-
жительной полуволны
на
левой клемме источника). Симистор откры-
125-
вается, подключая обмотку
О, ЭД к
источнику напрямую,
а О, — че-
рез фазосдвигающий конденсатор
С. Вал ЭД
отрабатывает рассогласо-
вание.
При
смене знака сигнала
S на
входе
РЭ
работает канал
// (с
симистором
V2),
обмотка
О
х
подключена через конденсатор
С, 0
2
—
напрямую;
ЭД
вращается
в
другую сторону.
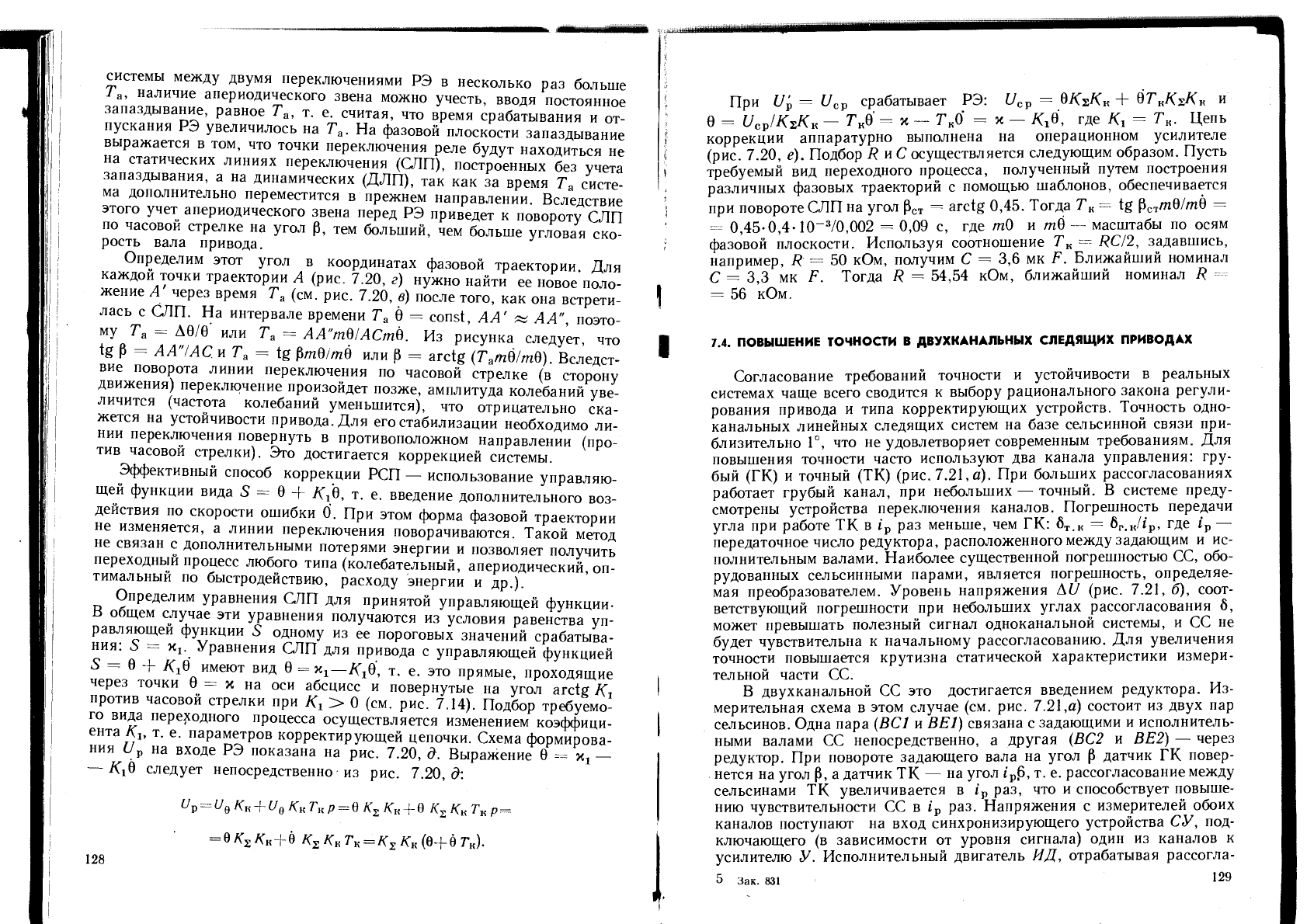
Ключ
Кл
работает следующим образом. Цепь управления сими-
стора
VI (V2) в оба
полупериода питающего напряжения замыкается
при открытии транзистора
V12.
Последний открывается выпрямителем
V7
... V10 при
открытии оптрона
VII (на рис. 7.19
путь тока показан
для положительной полуволны
на
левом выводе). Оптрон гальваниче-
ски развязывает цепи управления
и
силовые. Фиксированное открытие
V12 обеспечивается сигналом смещения
U
CM
.
пгтт
ТабИЛИЗаЦИЯ привода
-
В
общем случае вынужденные движения
РСП колебательные. Однако
при
отработке скачка угла
при
наличии
трения привод может остановиться
в ЗНЧ РЭ.
Автоколебания обычно
устраняют введением корректирующих цепей
в
контур управления.
Один
из
простейших способов стабилизации
—
механическое демп-
фирование путем увеличения нагрузки
на
выходном валу.
Это
достига-
ется введением демпферов
или
искусственным увеличением трения
в
ме-
ханизме.
Так как при
этом
для
гашения автоколебаний
из
системы
за-
бирается дополнительная энергия,
то
такой способ энергетически невы-
годен. Одним
из
распространенных способов стабилизации является
использование отрицательной обратной связи
по
частоте вращения
(см.
рис. 7.12),
реализуемой тахогенератором
(ТГ).
Однако наличие
ТГ увеличивает массу
и
уменьшает
к. п. д.
привода,
а его
сигнал недо-
статочно стабилен (например,
при
использовании постоянных магнитов
в качестве индуктора
—
вследствие зависимости параметров магнита
от температуры). Современные средства микроэлектронной техники
позволяют устранить автоколебания
СС
введением корректирующих
связей.
Эффективно введение
в
прямую цепь контура управления сигна-
ла
по
производной ошибке
6. Это
упреждает переключения
РЭ, что
Рис.
7.19.
Схема ключа переменного тока
126
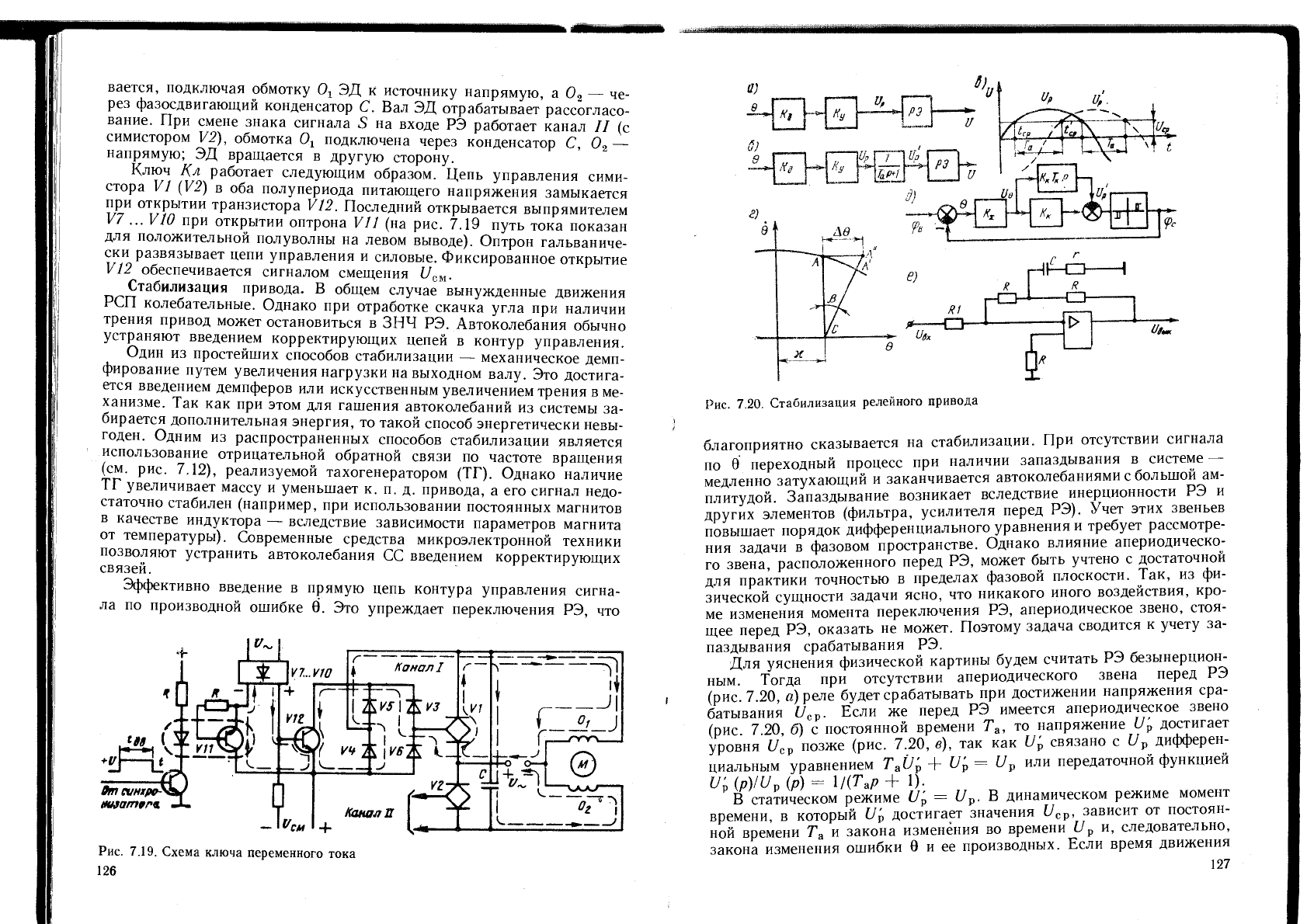
Рис.
7.20.
Стабилизация релейного привода
благоприятно сказывается
на
стабилизации.
При
отсутствии сигнала
по
9
переходный процесс
при
наличии запаздывания
в
системе
—
медленно затухающий
и
заканчивается автоколебаниями
с
большой
ам-
плитудой. Запаздывание возникает вследствие инерционности
РЭ и
других элементов (фильтра, усилителя перед
РЭ).
Учет этих звеньев
повышает порядок дифференциального уравнения
и
требует рассмотре-
ния задачи
в
фазовом пространстве. Однако влияние апериодическо-
го звена, расположенного перед
РЭ,
может быть учтено
с
достаточной
для практики точностью
в
пределах фазовой плоскости.
Так, из фи-
зической сущности задачи ясно,
что
никакого иного воздействия, кро-
ме изменения момента переключения
РЭ,
апериодическое звено, стоя-
щее перед
РЭ,
оказать
не
может. Поэтому задача сводится
к
учету
за-
паздывания срабатывания
РЭ.
Для уяснения физической картины будем считать
РЭ
безынерцион-
ным Тогда
при
отсутствии апериодического звена перед
РЭ
(рис
7 20 а)
реле будет срабатывать
при
достижении напряжения сра-
батывания <У
ср
. Если
же
перед
РЭ
имеется апериодическое звено
(рис
7 20 б) с
постоянной времени
Т
а
, то
напряжение
<У
Р
достигает
уровня <У
ср
позже
(рис. 7.20, в), так как (У
р
связано
с U
p
дифферен-
циальным уравнением Т
а
(7
р
+ <У
Р
= U
p
или
передаточной функцией
V' (р)Ш
р
(р) - 1/(Т
аР
+ 1).
В статическом режиме
<У
Р
= U
p
. В
динамическом режиме момент
времени
в
который
<У
р
достигает значения <У
ср
, зависит
от
постоян-
ной времени
Т
а
и
закона изменения
во
времени
<У
Р
и,
следовательно,
закона изменения ошибки
6 и ее
производных. Если время движения
127
системы между двумя переключениями
РЭ в
несколько
раз
больше
1
а
, наличие апериодического звена можно учесть, вводя постоянное
запаздывание, равное
Т
а
, т. е.
считая,
что
время срабатывания
и от-
пускания
РЭ
увеличилось
на Т
а
. На
фазовой плоскости запаздывание
выражается
в том, что
точки переключения реле будут находиться
не
на статических линиях переключения (СЛП), построенных
без
учета
запаздывания,
а на
динамических (ДЛП),
так как за
время
Т
а
систе-
ма дополнительно переместится
в
прежнем направлении. Вследствие
этого учет апериодического звена перед
РЭ
приведет
к
повороту
СЛП
по часовой стрелке
на
угол
В, тем
больший,
чем
больше угловая ско-
рость вала привода.
Определим этот угол
в
координатах фазовой траектории
Для
каждой точки траектории
А (рис. 7.20, г)
нужно найти
ее
новое поло-
жение
А
через время
Т
а
(см. рис. 7.20, в)
после того,
как она
встрети-
лась
с СЛП. На
интервале времени
Т
а
6 = const, АА' « АА",
поэто-
му
Т
а
= АО/О или Т
а
=
АА"шв/АСтв.
Из
рисунка следует,
что
tg В
=
А А"/АС.
и Т
а
= tg
Втв//пё
или
В
= arctg
(Т
а
гпв/тв). Вследст-
вие поворота линии переключения
по
часовой стрелке
(в
сторону
движения) переключение произойдет позже, амплитуда колебаний уве-
личится (частота колебаний уменьшится),
что
отрицательно ска-
жется
на
устойчивости привода.
Для
его стабилизации необходимо
ли-
нии переключения повернуть
в
противоположном направлении (про-
тив часовой стрелки).
Это
достигается коррекцией системы.
Эффективный способ коррекции
РСП —
использование управляю-
щей функции вида
S = 9 + ^в, т. е.
введение дополнительного воз-
действия
по
скорости ошибки
0. При
этом форма фазовой траектории
не изменяется,
а
линии переключения поворачиваются. Такой метод
не связан
с
дополнительными потерями энергии
и
позволяет получить
переходный процесс любого типа (колебательный, апериодический
оп-
тимальный
по
быстродействию, расходу энергии
и др.).
Определим уравнения
СЛП для
принятой управляющей функции-
а общем случае
эти
уравнения получаются
из
условия равенства
уп-
равляющей функции
5
одному
из ее
пороговых значений срабатыва-
ния:
6 - щ.
Уравнения
СЛП для
привода
с
управляющей функцией
S
=
Q
+ К
г
9
имеют
вид 9 =
Xl
—/С
г
8",
т. е. это
прямые, проходящие
через точки
9 = х на оси
абсцисс
и
повернутые
на
угол
arctg К
л
против часовой стрелки
при К
г
> 0 (см. рис. 7.14).
Подбор требуемо-
го вида переходного процесса осуществляется изменением коэффици-
ента
К
ь
т. е.
параметров корректирующей цепочки. Схема формирова-
ния
<У
р
на
входе
РЭ
показана
на рис. 7.20, д.
Выражение
9 = х
г
—
~
KiQ
следует непосредственно
из рис. 7.20, д:
=е/г
а
/г
К
+6
*
г
*
к
г„=*
г
Ме+бг
к
).
128
При
Up =
<У
ср
срабатывает
РЭ:
<У
ср
=
QKzK
K
+
ВТ
к
КхК«
и
9 =
U
cp
/KzK
K
— T
K
Q = х — Г
к
0 = х — /Схв, где Ki = Т
к
.
Цепь
коррекции аппаратурно выполнена
на
операционном усилителе
(рис.
7.20, е).
Подбор
R и С
осуществляется следующим образом. Пусть
требуемый
вид
переходного процесса, полученный путем построения
различных фазовых траекторий
с
помощью шаблонов, обеспечивается
при повороте СЛП
на
угол
р
ст
= arctg 0,45.
Тогда
Т
к
= tg B
CT
m9/m9 =
=
0,45-0,4-10""
3
/0,002 = 0,09 с, где т0 и тб
—- масштабы
по
осям
фазовой плоскости. Используя соотношение
Т
к
— RC/2,
задавшись,
например,
R = 50 кОм,
получим
С = 3,6 мк F.
Ближайший номинал
С
= 3,3 мк F.
Тогда
R = 54,54 кОм,
ближайший номинал
R
:
=
56 кОм.
7.4.
ПОВЫШЕНИЕ ТОЧНОСТИ
В
ДВУХКАНАЛЬНЫХ СЛЕДЯЩИХ ПРИВОДАХ
Согласование требований точности
и
устойчивости
в
реальных
системах чаще всего сводится
к
выбору рационального закона регули-
рования привода
и
типа корректирующих устройств. Точность одно-
канальных линейных следящих систем
на
базе сельсинной связи при-
близительно
Г, что не
удовлетворяет современным требованиям.
Для
повышения точности часто используют
два
канала управления: гру-
бый
(ГК) и
точный
(ТК)
(рис.
7.21, а). При
больших рассогласованиях
работает грубый канал,
при
небольших
—
точный.
В
системе преду-
смотрены устройства переключения каналов. Погрешность передачи
угла
при
работе
ТК в t'
p
раз
меньше,
чем ГК: б
т
.к =
<V
K
/i
p
,
где /
р
—
передаточное число редуктора, расположенного между задающим
и ис-
полнительным валами. Наиболее существенной погрешностью
СС,
обо-
рудованных сельсинными парами, является погрешность, определяе-
мая преобразователем. Уровень напряжения
А(7 (рис. 7.21, б),
соот-
ветствующий погрешности
при
небольших углах рассогласования
б,
может превышать полезный сигнал одноканальной системы,
и СС не
будет чувствительна
к
начальному рассогласованию.
Для
увеличения
точности повышается крутизна статической характеристики измери-
тельной части
СС.
В двухканальной
СС это
достигается введением редуктора.
Из-
мерительная схема
в
этом случае
(см. рис.
7.21,а) состоит
из
двух
пар
сельсинов. Одна пара
(ВС1 и ВЕ1)
связана
с
задающими
и
исполнитель-
ными валами
СС
непосредственно,
а
другая
(ВС2 и ВЕ2) —
через
редуктор.
При
повороте задающего вала
на
угол
В
датчик
ГК
повер-
нется
на
угол В,
а
датчик
ТК — на
угол
i'
p
6, т. е.
рассогласование между
сельсинами
ТК
увеличивается
в /
р
раз, что и
способствует повыше-
нию чувствительности
СС в t
p
раз.
Напряжения
с
измерителей обоих
каналов поступают
на
вход синхронизирующего устройства
СУ,
под-
ключающего
(в
зависимости
от
уровня сигнала) один
из
каналов
к
усилителю
У.
Исполнительный двигатель
ИД,
отрабатывая рассогла-
5 Зак. 831
129
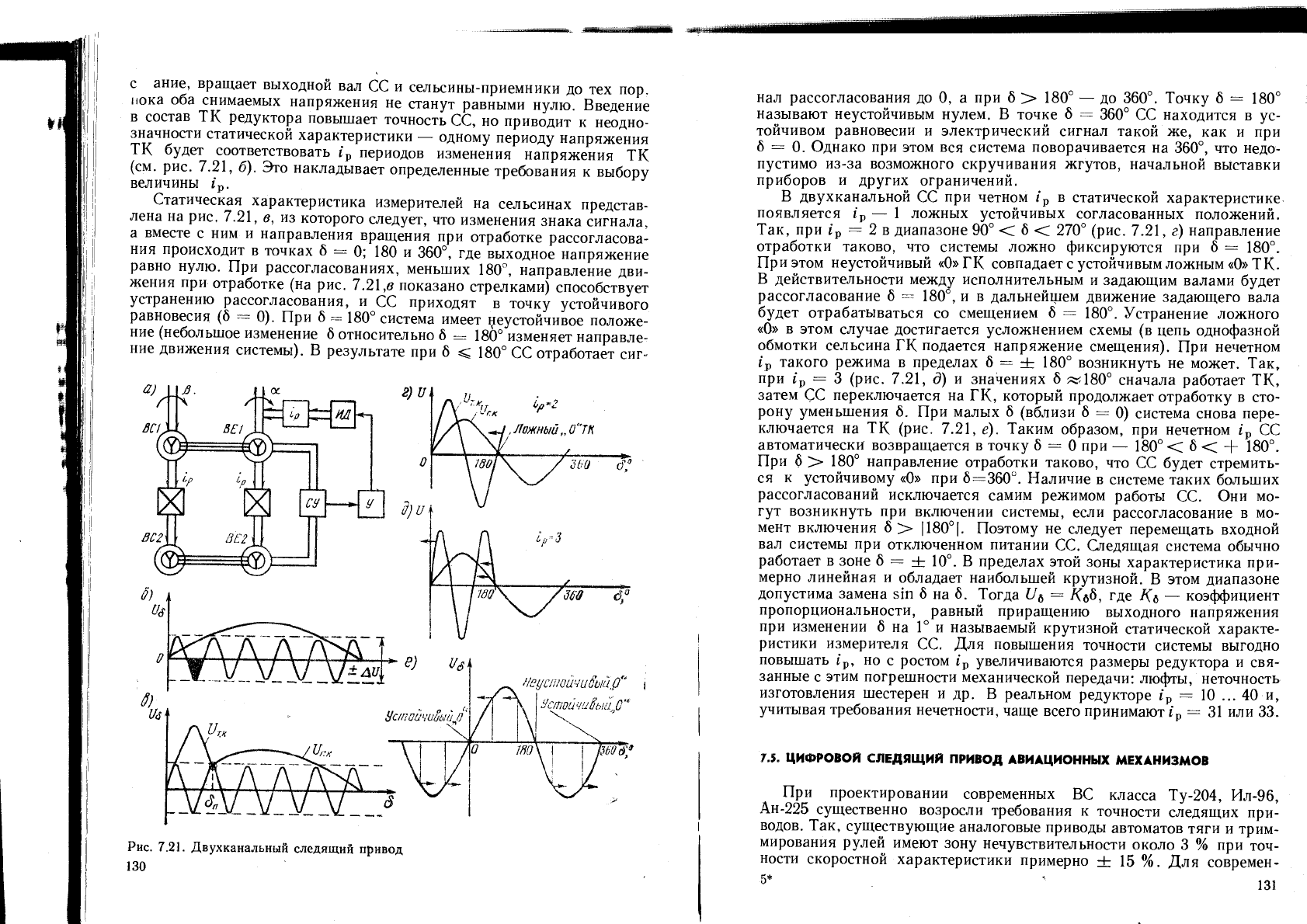
с ание, вращает выходной вал СС и сельсины-приемники до тех пор.
пока оба снимаемых напряжения не станут равными нулю. Введение
в состав ТК редуктора повышает точность СС, но приводит к неодно-
значности статической характеристики — одному периоду напряжения
ТК будет соответствовать i
p
периодов изменения напряжения ТК
(см.
рис. 7.21, б). Это накладывает определенные требования к выбору
величины г„.
Статическая характеристика измерителей на сельсинах представ-
лена на рис. 7.21, в, из которого следует, что изменения знака сигнала,
а вместе с ним и направления вращения при отработке рассогласова-
ния происходит в точках 6 = 0; 180 и 360°, где выходное напряжение
равно нулю. При рассогласованиях, меньших 180°, направление дви-
жения при отработке (на рис. 7.21,в показано стрелками) способствует
устранению рассогласования, и СС приходят в точку устойчивого
равновесия (6 = 0). При 6 = 180° система имеет неустойчивое положе-
ние (небольшое изменение 6 относительно 6 = 180° изменяет направле-
ние движения системы). В результате при 6 < 180° СС отработает сиг-
Рис.
7.21. Двухканальный следящий привод
130
нал рассогласования до 0, а при 6 > 180° — до 360°. Точку 6 = 180°
называют неустойчивым нулем. В точке 6 = 360° СС находится в ус-
тойчивом равновесии и электрический сигнал такой же, как и при
6 = 0. Однако при этом вся система поворачивается на 360°, что недо-
пустимо из-за возможного скручивания жгутов, начальной выставки
приборов и других ограничений.
В двухканальной СС при четном /
р
в статической характеристике
появляется i
p
— 1 ложных устойчивых согласованных положений.
Так, при г'
р
= 2 в диапазоне 90° < 6 < 270° (рис. 7.21, г) направление
отработки таково, что системы ложно фиксируются при 6 = 180°.
При этом неустойчивый «0» ГК совпадает с устойчивым ложным «0» ТК.
В действительности между исполнительным и задающим валами будет
рассогласование 6 == 180°, и в дальнейшем движение задающего вала
будет отрабатываться со смещением 6 = 180°. Устранение ложного
«О» в этом случае достигается усложнением схемы (в цепь однофазной
обмотки сельсина ГК подается напряжение смещения). При нечетном
i
p
такого режима в пределах 8 = ± 180° возникнуть не может. Так,
при ip = 3 (рис. 7.21, д) и значениях 6 «180° сначала работает ТК,
затем СС переключается на ГК, который продолжает отработку в сто-
рону уменьшения 6. При малых 6 (вблизи 6 = 0) система снова пере-
ключается на ТК (рис. 7.21, ё). Таким образом, при нечетном t'
p
СС
автоматически возвращается в точку 6 = 0 при — 180° < 6 <С + 180°.
При б > 180° направление отработки таково, что СС будет стремить-
ся к устойчивому «0» при 6=360°. Наличие в системе таких больших
рассогласований исключается самим режимом работы СС. Они мо-
гут возникнуть при включении системы, если рассогласование в мо-
мент включения 6 >- |180°|. Поэтому не следует перемещать входной
вал системы при отключенном питании СС. Следящая система обычно
работает в зоне 6 = ± 10°. В пределах этой зоны характеристика при-
мерно линейная и обладает наибольшей крутизной. В этом диапазоне
допустима замена sin 6 на 6. Тогда (7
6
= /С
б
8, где Кь — коэффициент
пропорциональности, равный приращению выходного напряжения
при изменении 6 на Г и называемый крутизной статической характе-
ристики измерителя СС. Для повышения точности системы выгодно
повышать
i
p
,
но с ростом i
p
увеличиваются размеры редуктора и свя-
занные с этим погрешности механической передачи: люфты, неточность
изготовления шестерен и др. В реальном редукторе i
p
= 10 ... 40 и,
учитывая требования нечетности, чаще всего принимают i
p
= 31 или 33.
7.5. ЦИФРОВОЙ СЛЕДЯЩИЙ ПРИВОД АВИАЦИОННЫХ МЕХАНИЗМОВ
При проектировании современных ВС класса Ту-204, Ил-96,
Ан-225 существенно возросли требования к точности следящих при-
водов. Так, существующие аналоговые приводы автоматов тяги и трим-
мирования рулей имеют зону нечувствительности около 3 % при точ-
ности скоростной характеристики примерно ± 15 %. Для современ-
ных ВС эти показатели должны быть не хуже 0,4 и 10 % соответствен-
но.
Выполнить эти требования на базе двухфазных ЭД серии ДГ не
представляется возможным вследствие нестабильности характеристик
асинхронных тахогенераторов и несоответствия самих ЭД этого типа
требованиям НЛГС. Один из способов решения данной задачи — при-
менение цифровых систем управления на базе бесконтактных ДПТ.
Возросшие требования к автоматизации процессов управления и,
как следствие, увеличение объема вычислительных операций оконча-
тельно выявили необходимость объединения всех вычислительных
операций на ВС в единый бортовой пилотажно-навигационный ком-
плекс (БПНК) на базе бортовых цифровых вычислительных машин.
Приводы с цифровым управлением входят в состав БПНК как органи-
ческие части.
Система обработки информации строится по иерархическому прин-
ципу. Основные вычислительные операции выполняются в централь-
ном БПНК, обладающем большими объемами памяти и высоким бы-
стродействием. Результаты вычислений передаются мультиплексно
(по очереди) через дискретные промежутки времени (кванты) цифро-
вым приводам, в которых производится окончательная обработка сиг-
налов управления и исполнение заданного закона управления приво-
дом.
Цифровая обработка сигналов имеет ряд преимуществ перед ана-
логовой: высокая точность, широкие функциональные возможности,
удобство стыковки с БЦВМ, отсутствие «дрейфа нуля», перерегулиро-
вания скорости и т. д.
Однако цифровой обработке присущи и характерные недостатки,
связанные со сбоем триггерных схем и временной потерей информации-
Последнее обусловлено тем, что в цифровых системах отработка и пере-
дача информации осуществляются не непрерывно, а дискретно, поэто-
му к исходу текущего кванта в памяти вычислительных средств хра-
нится информация, сформированная во время предыдущего кванта-
Эта потеря информации приводит к тому, что в течение кванта замкну-
тые системы по существу становятся разомкнутыми. Вследствие этого
для обеспечения устойчивости систем желательно увеличить частоту
квантования. Допустимые значения этой частоты сверху ограничены
быстродействием вычислительных средств, а снизу — условиями тео-
ремы Котельникова, теоретически обосновывающей возможность пере-
дачи непрерывных сигналов их дискретными значениями. В соответст-
вии с этой теоремой любую функцию времени / (t), характеризуемую
частотой сигнала от 0 до /
с
, можно передать с любой точностью при по-
мощи дискретных чисел, следующих друг за другом через интервалы
времени, не более At =
1/2/
с
.
Большинство авиационных следящих приводов выполнено скорост-
ными, т. е. пропорционально входному сигналу изменяется скорость
выходного вала (приводы автоматов тяги, рулевых поверхностей, сле-
дящие приводы управления АД). Возможность реализации статическо-
132
—~
АЦП
-НХ>*
с
ч
шим
КОд
Т
т
ДПР
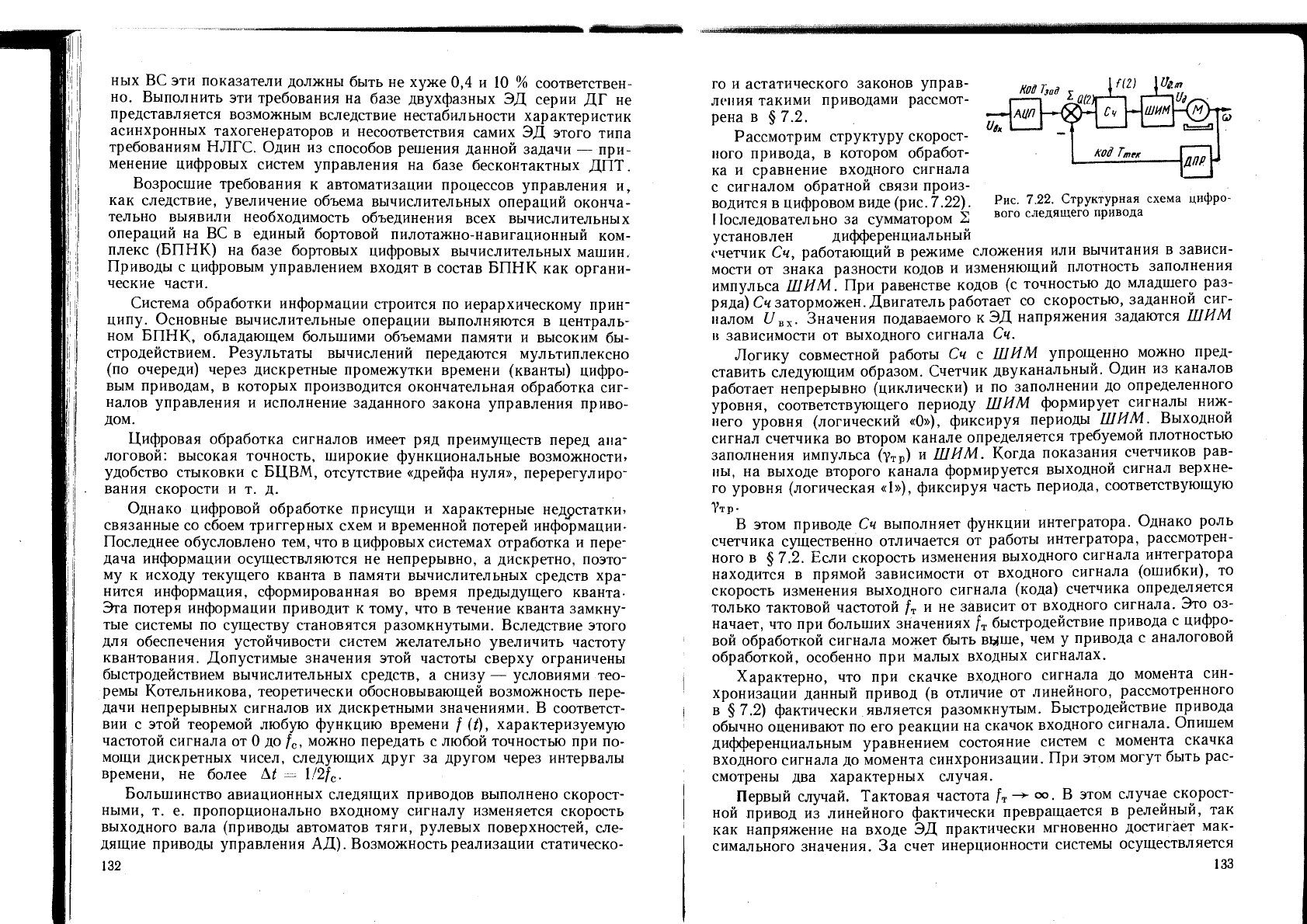
Рис.
7.22. Структурная схема цифро-
вого следящего привода
го и астатического законов управ-
ления такими приводами рассмот-
рена в § 7.2.
Рассмотрим структуру скорост-
ного привода, в котором обработ-
ка и сравнение входного сигнала
с сигналом обратной связи произ-
водится в цифровом виде (рис.
7.22).
Последовательно за сумматором 2
установлен дифференциальный
счетчик Сч, работающий в режиме сложения или вычитания в зависи-
мости от знака разности кодов и изменяющий плотность заполнения
импульса ШИМ. При равенстве кодов (с точностью до младшего раз-
ряда) Сч заторможен. Двигатель работает со скоростью,заданной сиг-
налом U
BX
. Значения подаваемого к ЭД напряжения задаются ШИМ
в зависимости от выходного сигнала Сч.
Логику совместной работы Сч с ШИМ упрощенно можно пред-
ставить следующим образом. Счетчик двуканальный. Один из каналов
работает непрерывно (циклически) и по заполнении до определенного
уровня, соответствующего периоду ШИМ формирует сигналы ниж-
него уровня (логический «0»), фиксируя периоды ШИМ. Выходной
сигнал счетчика во втором канале определяется требуемой плотностью
заполнения импульса (у
тр
) и ШИМ. Когда показания счетчиков рав-
ны,
на выходе второго канала формируется выходной сигнал верхне-
го уровня (логическая «1»), фиксируя часть периода, соответствующую
Утр-
В этом приводе Сч выполняет функции интегратора. Однако роль
счетчика существенно отличается от работы интегратора, рассмотрен-
ного в § 7.2. Если скорость изменения выходного сигнала интегратора
находится в прямой зависимости от входного сигнала (ошибки), то
скорость изменения выходного сигнала (кода) счетчика определяется
только тактовой частотой /
т
и не зависит от входного сигнала. Это оз-
начает, что при больших значениях /
т
быстродействие привода с цифро-
вой обработкой сигнала может быть выше, чем у привода с аналоговой
обработкой, особенно при малых входных сигналах.
Характерно, что при скачке входного сигнала до момента син-
хронизации данный привод (в отличие от линейного, рассмотренного
в §7.2) фактически является разомкнутым. Быстродействие привода
обычно оценивают по его реакции на скачок входного сигнала. Опишем
дифференциальным уравнением состояние систем с момента скачка
входного сигнала до момента синхронизации. При этом могут быть рас-
смотрены два характерных случая.
Первый случай. Тактовая частота f
T
оо. В этом случае скорост-
ной привод из линейного фактически превращается в релейный, так
как напряжение на входе ЭД практически мгновенно достигает мак-
симального значения. За счет инерционности системы осуществляется
133
приводГ
аЦИЯ ПрИВ0Да
"
Рассмот
Р
им
процессы, протекающие в таком
Для упрощения введем следующие допущения: потери в стали дви-
гателя равны нулю, регулировочная характеристика
и>
= f (у) _ ли-
нейная функция во всем диапазоне регулирования, механические ха-
рактеристики двигателя линейные, к. п. д. редуктора принимается рав-
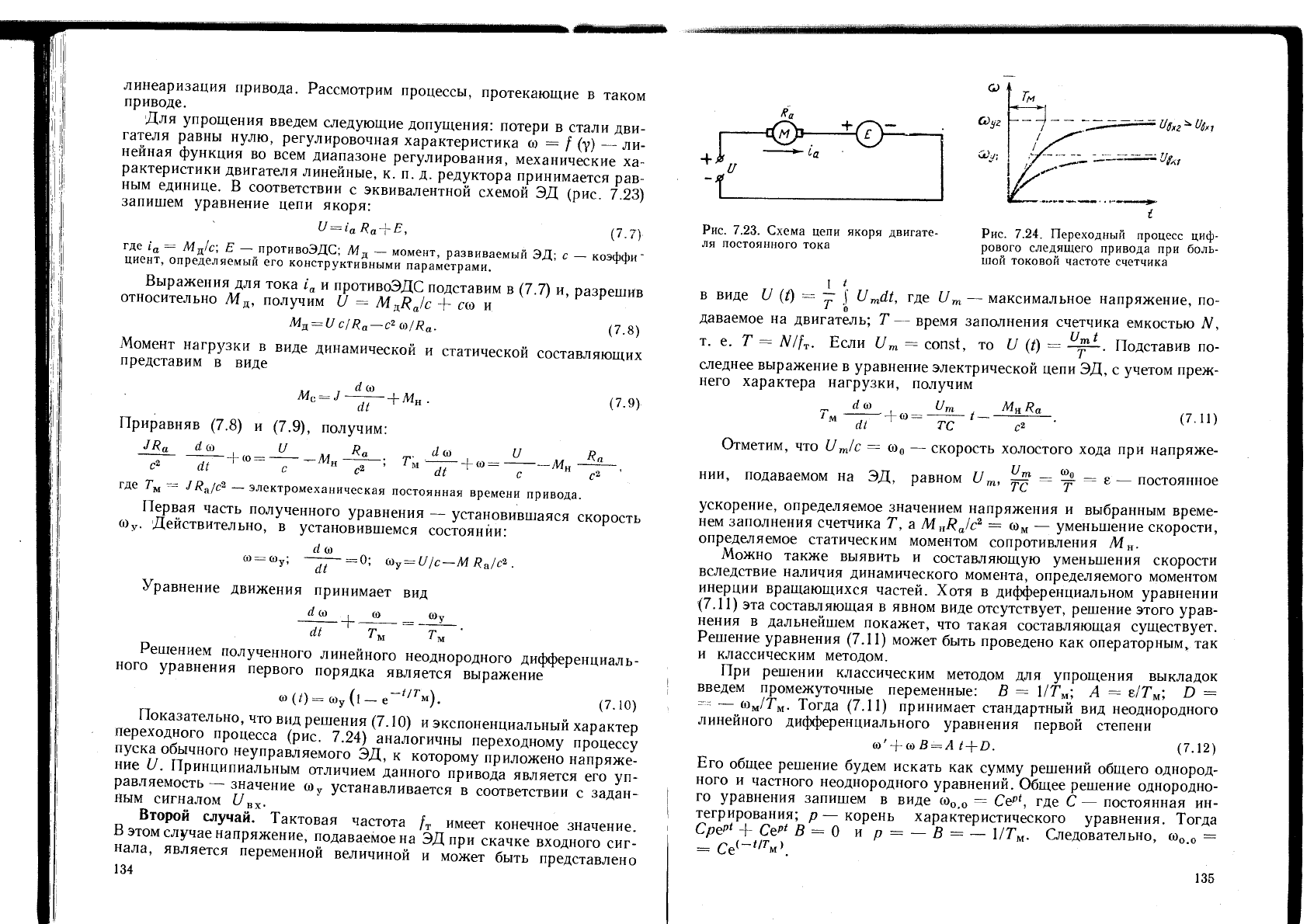
ным единице. В соответствии с эквивалентной схемой ЭД (рис 7 23)
запишем уравнение цепи якоря:
;
U
=
i
a
R
a
-\-E,
(7 jy
п
Д
„
6
Л
= Мд/с; Е
-„противоЭДС; М
я
- момент, развиваемый ЭД- с - коэсМш -
циент, определяемый его конструктивными параметрами.
ФФ
Выражения для тока i
a
и противоЭДС подставим в (7.7) и разрешив
относительно М
д
, получим U =
M
n
RJc
+ ш и Р
аз
Решив
M
a
= Uc/R
a
-
c
2m/R
a
.
(7 8)
п^вим ТГиде
ВИДе Д
™
аМИЧеСК0Й И
этической составляющих
кя 1 d со
Mc =
J
~aTT
+
(7.9).
Приравняв (7.8) и
(7.9),
получим:
-1__
+ <0
L_ „ __о_. _. с/со (7 ^
где Г
м
= У/?
а
/
с
а — электромеханическая постоянная времени привода.
Первая часть полученного уравнения - установившаяся скорость
©у. Действительно, в установившемся состоянйи:
d
со
(о = со
у
; —— =0;
Ыу
= и/с~М
RJc*
.
Уравнение движения принимает вид
d
со , to coy
ногоТпавн^
и
ТГ
еННОГ
°
линейного
неоднородного дифференциаль-
ного уравнения первого порядка является выражение
со(0=соу (l — e~
t/T
™). (
7
щ
nepe^HoTZ;
4
™ Т
РеШ
^
(?
-
Ю) И
экспоненциальный характер
п^ЛТ к процесса (рис. 7.24 аналогичны переходному процессу
н11и
ПпиГ
Не
У
п
Р
авляемо
™ ЭД, к которому приложено на^ряже*
ние U. Принципиальным отличием данного привода является его уп-
Р
ш:^ой
3
^Г
е
У
™ » со
Д
ответствии
СЯ
с
е
з^н-
ВэтоГг^ия^
4
^'
Тактовая частота
fr имеет конечное значение,
нала явГя^Г
РЯЖеНИе
'
п
°Д
аваем
°ена ЭД при скачке входного сиг-
нала, является переменной величиной и может быть представлено
134
1
U
-<5>—Ч£>
*-
£д
Рис.
7.23. Схема цепи якоря двигате-
ля постоянного тока
Рис.
7.24. Переходный процесс циф-
рового следящего привода при боль-
шой токовой частоте счетчика
в виде U (г) = —
U
m
dt,
где U
m
— максимальное напряжение, по-
даваемое на двигатель; Г — время заполнения счетчика емкостью N,
т. е. Т = N/f
T
. Если U
m
=
const,
то U (г) = Подставив по-
следнее выражение в уравнение электрической цепи ЭД, с учетом преж-
него характера нагрузки, получим
d
со
М
п
R
a
НИИ
- dt тг-'—* •
(7Л1)
Отметим, что U
m
/c = w
0
— скорость холостого хода при напряже-
подаваемом на ЭД, равном U
m
, ^ = 52а =
8
— постоянное
ускорение, определяемое значением напряжения и выбранным време-
нем заполнения счетчика Т, aM„RJc
2
= со
м
— уменьшение скорости,
определяемое статическим моментом сопротивления М
я
.
Можно также выявить и составляющую уменьшения скорости
вследствие наличия динамического момента, определяемого моментом
инерции вращающихся частей. Хотя в дифференциальном уравнении
{7.11) эта составляющая в явном виде отсутствует, решение этого урав-
нения в дальнейшем покажет, что такая составляющая существует.
Решение уравнения
(7.11)
может быть проведено как операторным, так
и классическим методом.
При решении классическим методом для упрощения выкладок
введем промежуточные переменные: В = \1Т
М
; А = е/Т
м
; D =
=
„
й)
м/7
,
м
.
Тогда
(7.11)
принимает стандартный вид неоднородного
линейного дифференциального уравнения первой степени
co'-fco
В
=
А /
+ £>.
(7.12)
Его общее решение будем искать как сумму решений общего однород-
ного и частного неоднородного уравнений. Общее решение однородно-
го уравнения запишем в виде со
0
.
0
= Се?', где С — постоянная ин-
тегрирования; /?—корень характеристического уравнения. Тогда
Ре
,t,,9\
В = 0 и
/> = — В = - 1/Т
м
. Следовательно, со
0 0
=
=
Се
(
' м>
135
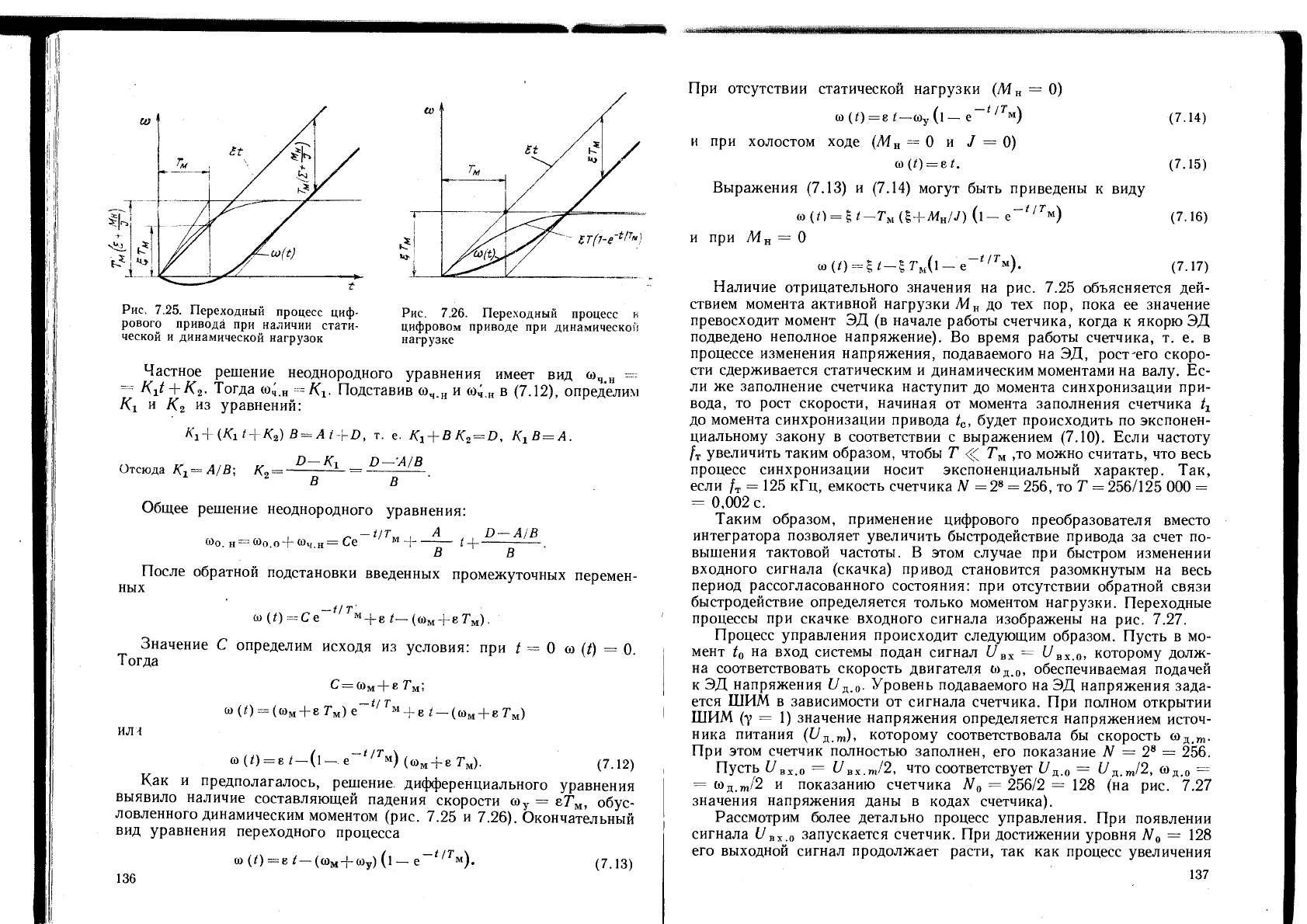
Рис.
7.25.
Переходный процесс
циф-
рового
привода
при
наличии стати-
ческой
и
динамической нагрузок
Рис.
7.26.
Переходный процесс
ь
цифровом
приводе
при
динамической
нагрузке
Частное решение неоднородного уравнения имеет
вид
со
ЧЛ1
•
Kit + К
2
-
Тогда С0ц.„
=К
г
.
Подставив
со
ч
.
н
и
©ч,
н
в
(7.12),
определим
К
г
и К2 из
уравнений:
Ki+(Kit
+ Ki) В = А i + D, т. е. Ki +
BKt^D,
^В = Л.
м
ь- л. а
D—Кг
D
—
A/B
Отсюда
/С
2
=
Л/В;
К
2
—
—
—
—
В
В
Общее решение неоднородного уравнения:
(0
о
.
H
=
w
0
.o
+
tt>
4
.H=
Се
В
В
ных
После обратной подстановки введенных промежуточных перемен-
-t/T'
u,(t)=Ce
«-f е t—
(сом
+
еГм).
Значение
С
определим исходя
из
условия:
при / =
О со
(/) = 0.
Тогда
С
=
со
м
+
е
Г
м
;
ш(/)
=
(ш
м
+
8Г
м
)е'
'
+
^-(ш
м
+
еГ
м
)
илч
co(0=8f-(l-e
'
/Гм
)(со
м
+
8
Г
м
).
(7.12)
Как
и
предполагалось, решение дифференциального уравнения
выявило наличие составляющей падения скорости
со
у
=
ЕТ
М
,
обус-
ловленного динамическим моментом (рис.
7.25 и
7.26).
Окончательный
вид уравнения переходного процесса
со
(0
=е
/-(ft>M
+
w
y
)
(l
—
е~'
/7
м).
136
(7.13)
При отсутствии статической нагрузки
(М
Н
= 0)
ш(0=ег
—
w
y
(l—
е
-
'
/Гм
)
(7.14)
и
при
холостом ходе (7И„ ==
0 и / = 0)
a>(t)
= et.
(7.15)
Выражения
(7.13)
и
(7.14)
могут быть приведены
к
виду
a(t) = tt-T
H
(l
+
M
B
/J)
(l- е~"
Т
™)
(7.16)
и
при М
П
= 0
to(0 = £t-Sr
M
(l-e^
/r
*').
(7.17)
Наличие отрицательного значения
на рис. 7.25
объясняется дей-
ствием момента активной нагрузки
М
Н
до тех пор,
пока
ее
значение
превосходит момент
ЭД (в
начале работы счетчика, когда
к
якорю ЭД
подведено неполное напряжение).
Во
время работы счетчика,
т. е. в
процессе изменения напряжения, подаваемого
на
ЭД, рост-его скоро-
сти сдерживается статическим
и
динамическим моментами на валу.
Ес-
ли
же
заполнение счетчика наступит
до
момента синхронизации при-
вода,
то
рост скорости, начиная
от
момента заполнения счетчика
/
2
до момента синхронизации привода
/
с
,
будет происходить по экспонен-
циальному закону
в
соответствии
с
выражением
(7.10).
Если частоту
/т увеличить таким образом, чтобы
Т
<^
Т
М
,то можно считать, что весь
процесс синхронизации носит экспоненциальный характер.
Так,
если
U =
125 кГц, емкость счетчика
N = 2
8
=
256, то
Т =
256/125
ООО
=
=
0,002
с.
Таким образом, применение цифрового преобразователя вместо
интегратора позволяет увеличить быстродействие привода
за
счет
по-
вышения тактовой частоты.
В
этом случае
при
быстром изменении
входного сигнала (скачка) привод становится разомкнутым
на
весь
период рассогласованного состояния:
при
отсутствии обратной связи
быстродействие определяется только моментом нагрузки. Переходные
процессы
при
скачке входного сигнала изображены
на
рис.
7.27.
Процесс управления происходит следующим образом. Пусть
в
мо-
мент
t
0
на
вход системы подан сигнал
V
вх
=
(7
вх-0
,
которому долж-
на соответствовать скорость двигателя <л>
д
.
0
, обеспечиваемая подачей
к ЭД напряжения £/
д
.
0
. Уровень подаваемого на ЭД напряжения зада-
ется ШИМ
в
зависимости
от
сигнала счетчика. При полном открытии
ШИМ
(у = 1)
значение напряжения определяется напряжением источ-
ника питания (с/д.
т
), которому соответствовала
бы
скорость
со
д-т
.
При этом счетчик полностью заполнен,
его
показание
N = 2
8
= 256.
Пусть {У
вх
.
0
= (У
вх
J2,
что соответствует (7
Д
.
0
=
<У
д
.
т
/2,
со
д
.
0
=
•=
(о
д
.
т
/2
и
показанию счетчика
N
0
=
256/2
= 128 (на рис. 7.27
значения напряжения даны
в
кодах счетчика).
Рассмотрим более детально процесс управления.
При
появлении
сигнала
(7
ВХ
.
0
запускается счетчик. При достижении уровня
N
Q
= 128
его выходной сигнал продолжает расти,
так как
процесс увеличения
137