Растригин Л.А. Адаптация сложных систем
Подождите немного. Документ загружается.

тате его усложнения (увеличения числа входов) не является
неизбежным. Более того, при случайных входах надежность растет с
увеличением числа входов! Это объясняется малым числом «рабочих»
сверток (как и в случае слабоопределенных функций), что фактически
эквивалентно снижению размерности элемента — эффект
множественного объединения нескольких соседних индексных зон в
одну.
В реальных условиях может допускаться функционирование
порогового элемента с некоторой ошибкой σ, т. е. на σ произвольных
входных наборах выходная функция может отличаться от заданной.
Так возникает задача разбиения всех допустимых логических функций
на непересекающиеся классы эквивалентности и определения их
мощности [15]. В общем случае на каждом S-м входном наборе X
S
может иметь независимую (индивидуальную!) значность
. Тогда количество указанных классов равно
Q+1, а их мощность
(4.3.72)
где S
j
— подмножество индексов S длины
σ, т. е. количество классов зависит только от числа входных наборов, а
мощность каждого класса определяется еще и количеством
допустимых значений выходной функции [15]. Частными случаями
приведенной оценки мощности классов являются следующие:
а) если , т. е. выходная функция равно
значна на любом наборе, то
(4.3.73)
б) если q
F
=q
i
=q, т. е. выходная функция
равнозначна по
входам и выходу, то
(4.3.74)
в) если q
F
=q
i
=q=2, т. е. выходная функция
является бу
левой, то
(4.3.75)
Последняя формула показывает специфичность булева
базиса (его вырожденность в классе многозначных логических функ-
ций). На основе приведенных оценок можно построить алгоритм
аппроксимации многозначных выходных функций в базисе случайных
логических функций.
В заключение отметим, что аппарат индексных зон можно
применить к решению актуальной проблемы классификации
многозначных логических функций, сложность которой общеизвестна.
Так, в работе [254, с. 36] класс троичных функций двух переменных
(q
1
= q
2
= q
F
= 3) до сих пор считается необозримым. Ранее было
известно [258], что в этом классе имеется 1593 функции (из общего их
числа 19683) с пороговым порядком k≤2, т. е. любая из них может
быть реализована многопороговой моделью с числом порогов, не
большим двух. В работе [23] полным перебором индексных зон
показано, что весь этот класс функций имеет сложность k≤7, т. е.
разбивается на семь подклассов.
§ 4.4. Адаптивный синтез
оптимальных планов эксперимента для
регрессионной модели
4.4.1. Постановка задачи
Одна из задач планирования эксперимента [137, 223] связана с
нахождением параметров c
1
, ..., c
q
модели, структура которой
определена:
(4.4.1)
где φ
i
(X) (i = l, ..., q) — заданная система линейно-
независимых скалярных функций векторного аргумента:
Х = (x
1
, ..., x
n
). (4.4.2)
Например, для структуры (4.4.1), определяемой полной квадратичной
формой, имеем систему функций φ
i
(X) вида
φ
1
(X) = 1; φ
2
(X) = x
1
; φ
3
(X) = x
2
; (4.4.3)
φ
4
(X) = x
1
2
; φ
5
(X) = x
1
2
; φ
6
(X) = x
1
x
2
,
где q = 6.
Задача определения параметров С = (c
1
, ..., c
q
) по наблюдениям
состояния объекта y
j
в точках X
j
(j = 1, ..., N≥n), т. е. на основе
информации
I = ‹ Х
j
, y
j
(j = 1, ..., N) ›, (4.4.4)
сводится, как известно, к решению стандартной задачи минимизации
функции суммарной невязки поведения модели (4.4.1) и объекта
(4.4.4):
(4.4.5)
где µ(٠) — функция,
обладающая естественными свойствами:
µ(٠) ≥ 0; µ(z) = µ( -z ); µ( 0 ) = 0, (4.4.6)
например,
µ(٠) = (٠)
2
; µ(٠) = | ٠ | (4.4.7)
и т. д. В задачах планирования эксперимента принята квадратичная
невязка, для которой, вычисляя частные производные и приравнивая
их к нулю:
(4.4.8)
получаем систему линейных
алгебраических уравнений вида
(4.4.9)
Матрицу этой системы
(4.4.10)
обычно называют матрицей Фишера
или информационной матрицей [137].
Задача планирования эксперимента заключается в определении
таких точек N экспериментов
(4.4.11)
называемых планом эксперимента, чтобы их
реализация (4.4.4) в объекте дала возможность наилучшим образом
определить параметры модели (4.4.1).
Легко видеть, что выбор точек плана далеко не произволен.
Действительно, они могут быть расположены так, что ранг матрицы Φ
станет меньше q и параметры из такого эксперимента невозможно

будет определить.

Для формирования критерия оптимальности плана будем
рассматривать объекты, выход которых определяется следующим
образом:
y
j
= f (X
j
) + ε
j
, (4.4.12)
т. е. является суммой регулярной и случайной составляющих.
Регулярная часть f(X) зависит только от входа X объекта, а случайная ε
не зависит от входа X и является независимой реализацией
нормального закона распределения с нулевым математическим
ожиданием и дисперсией σ
2
, т. е.
Mε = 0; Mε
2
= σ
2
, (4.4.13)
где М — знак математического ожидания. Значение дисперсии σ
2
может быть априори неизвестным.
Тогда результат каждого эксперимента является случайной
величиной, что делает случайными и параметры С модели (4.4.1).
Свойства случайного вектора С определяются его математическим
ожиданием
МС = С* = (с*
1
, ..., c*
q
) (4.4.14)
с дисперсионной матрицей:
DС = || σ
2
||
q×q
, (4.4.15)
где
σ
ij
= М (c
i
- с*
i
) (с
j
- с*
j
) (i, j = 1,..., q). (4.4.16)
Эта дисперсионная матрица и определяет все точностные свойства
параметров. Действительно, их дисперсии расположены по диагонали
матрицы и равны
Dc
i
= σ
ii
2
(i = 1, ..., q), (4.4.17)
а коэффициент корреляции i-го и j-го параметров модели равен σ
ij
2
.
Очевидно, что все экстремальные требования к эксперименту,
связанные с точностью определения искомых параметров, можно
определить на дисперсионной матрице (4.4.15) в виде скалярной
функции
K = K (DC), (4.4.18)
минимум которой соответствует выполнению требований экс-
перимента.
Например, функцией К может быть обобщенная дисперсия, т. е.
определитель дисперсионной матрицы
K
(1)
= | DC |, (4.4.19)
минимум которого часто интересует экспериментатора. Другой
пример критерия — след дисперсионной матрицы:
(4.4.201
Наконец, максимальная дисперсия
(4.4.21)
тоже может быть примером такой функции,
минимума которой добивается экспериментатор.
В общем случае вид функции (4.4.18) задается исходя из
потребностей экспериментатора и может быть любым.
Связь этой функции с планом . осуществляется через матрицу
Фишера в виде [223]
DС = σ
2
Φ
-1
, (4.4.22>
т. е. дисперсионная матрица (4.4.15) с точностью до постоянной равна
обратной матрице Фишера (4.4.10), что позволяет легко вычислять
любой элемент дисперсионной матрицы по заданному плану . Это
означает, что план и система функций φ
i
(X) (i = 1, ..., q) модели
(4.4.1) однозначно определяют дисперсионную матрицу, а вслед за ней
и значение критерия
(4.4.23)
где ψ — алгоритм определения критерия по формулам
(4.4.18), (4.4.22), (4.4.10) и (4.4.11). Это и позволяет назвать критерии
К критерием эффективности плана .
Теперь задача синтеза оптимального плана формулируется как
задача минимизации:
(4.4.24)
где S — область планирования эксперимента,
определяющая пределы изменения элементов плана в пространстве
входов объекта {X}.
В зависимости от выбора критерия K полученный оптимальный
план называют по-разному. При минимизации критерия
(4.4.19) получают D-оптимальный план , для критерия (4.4.20) —
A-оптимальный и для критерия (4.4.21) —
E-оптимальный . Заметим, что, согласно выражению
(4.4.22), минимизация |DC| эквивалентна максимизации определителя
матрицы Фишера Φ. Это значительно упрощает задачу, так как
отпадает необходимость в обращении матрицы. Указанным
обстоятельством пользуются при синтезе D-oп-тимального плана:
(4.4.25)
Задача (4.4.24) имеет в общем случае nN
искомых переменных и является многоэкстремальной задачей
нелинейного программирования. Воспользуемся для ее решения
методами параметрической адаптации и, в частности, случайным
поиском.
4.4.2. Последовательный синтез плана
Задача (4.4.24) обычно имеет очень большую размерность.
Естественно упростить ее путем декомпозиции на более простые
задачи, для чего используется прием сведения задачи (4.4.24) к
последовательности задач:
(4.4.26)
Эти задачи имеют лишь п
переменных, и результатом их решения является точка (q+z+1)-го
эксперимента. Добавляя ее к предыдущему плану эксперимента
(назовем его опорным)
, получаем план и т. д. Однако
исходный план должен быть задан или получен путем решения
задачи (4.4.24) при N = q. Такое последовательное наращивание плана
позволяет задачу оптимизации с nN переменными свести к
последовательности задач с п переменными (при заданном исходном
плане ).
Проанализируем задачи (4.4.26), получаемые таким после-
довательным синтезом [32]. Для этого построим рельеф мини-
мизируемой функции (4.4.26) в пространстве варьируемой точки X
плана
4.4.27) т. е. исследуем поведение
функции
(4.4.28)
Именно в этой ситуации решается задача
минимизации

(4.4.26). .
Рассмотрим в качестве критерия
оптимизации плана D-критерии
(4.4.19), т. е. будем решать задачу
максимизации определителя инфор-
мационной матрицы (4.4.25):
(4.4.29)
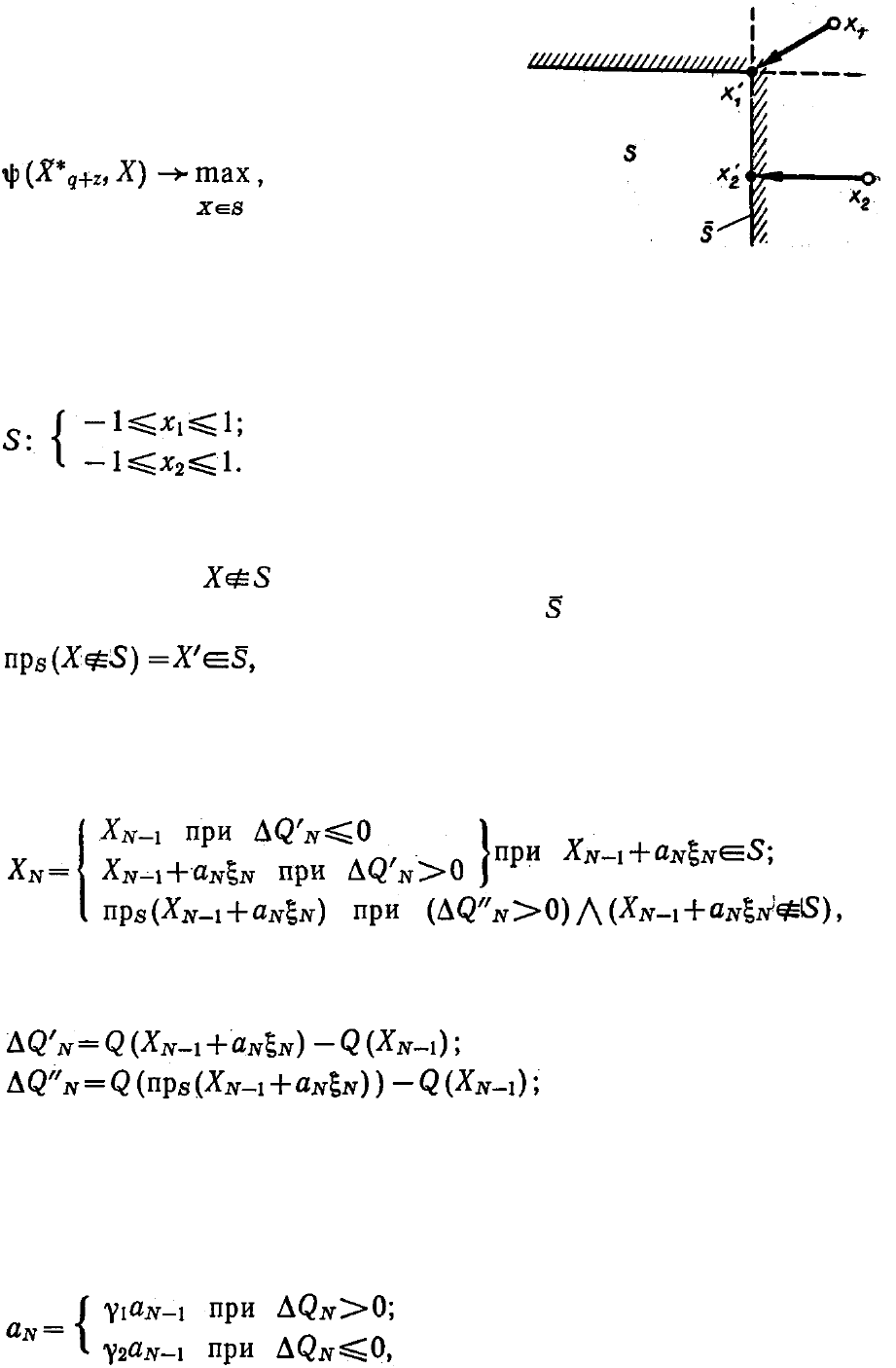
. Для решения задачи (4.4.29) естественно использовать локальный
случайный поиск с оператором проецирования точек на область
поиска при . В этом случае применялась процедура
ортогонального проецирования на границу области S:
(4.4.31)
работа которой проиллюстрирована на рис. 4.4.1.
Алгоритм поиска имел следующий вид (напомним, что рас-
сматривалась задача максимизации):
(4.4.32)
(4.4.33)
ξ
N
— N-я реализация
нормального случайного вектора с нулевым математическим
ожиданием и единичной дисперсией по всем направлениям {X}.
Параметр величины случайного шага a
N
адаптировался
стандартным образом (см. § 3.5):
(4.4.34).
Р
ис. 4.4.1. Работа процедуры
ортогонального проецирования
для прямоугольной области
планирования.
где ψ в данном случае есть алгоритм
вычисления определителя матрицы
Фишера на плане (4.4.27).
Область планирования S выберем
простейшую — квадрат (n = 2):
(4.4.30)
где
где ∆Q вычислялась по одной из формул (4.4.33) в зависимости от
сложившейся ситуации, параметр γ
2
=1,2, a γ
1
был выбран в
соответствии с указанными в § 3.5 рекомендациями. Рассмотрим
сначала линии равного уровня максимизируемого критерия (4.4.29)
для квадратичной формы (q = 5) вида
y = c
1
+ c
2
x
1
+ c
3
x
3
+ c
4
x
1
2
+ c
5
x
2
2
(4.4.35)
лри различном числе точек опорного плана .
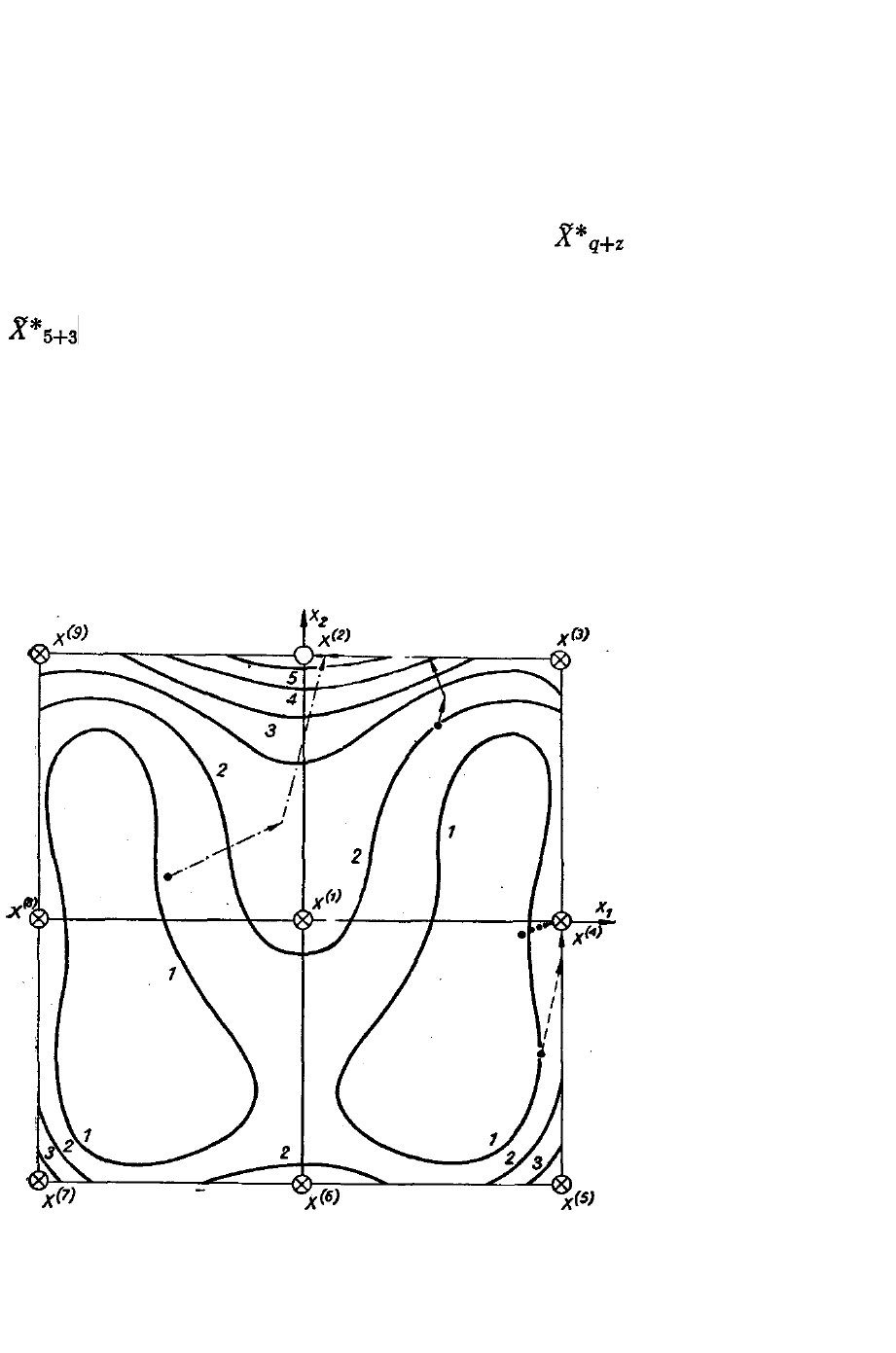
На рис. 4.4.2 изображены линии равного уровня значения
определителя матрицы Фишера при z=3. Здесь точки опорного плана
обозначены крестиками. Хорошо видно, что задача имеет
многоэкстремальный характер. Локальные экстремумы расположены в
точках i = 2, 4, 5, 6, 7, 8, а глобальный экстремум — в точке X
(2)
. Здесь
же показаны четыре траектории случайного поиска (4.4.32) со
случайными начальными точками. Две из этих траекторий сошлись к
глобальному экстремуму X
(2)
.
Рельеф для той же модели (4.4.35), но при другом опорном плане (i
= 2, 3, 4, 5, 6, 7, 8, 9) показан на рис. 4.4.3 (кружочки
Рис. 4.4.2. Линии равного уровня определителя ин-
формационной матрицы для полинома (4.4.35), со-
ответствующие следующим значениям: 1 — 3450, 2 —
3750, 3 — 4050, 4 — 4400, 5 — 4700. Максимум (5000) в
точке X
(2)
.