Растригин Л.А. Адаптация сложных систем
Подождите немного. Документ загружается.

Из (4.3.51), переходя к равенствам, легко получить выражение для
максимально допустимого отклонения δ
*
, которое является
характеристикой надежности данного ПЛЭ:
(4.3.53)
где . Величина порога τ определяется из
выражения:
(4.3.54)
Таким образом, данный ПЛЭ правильно вычисляет заданную
булеву функцию, если выполнено условие
δ≤δ
*
. (4.3.55)
В случае МПЛЭ ‹U, Т, α› имеем:
где δ
*
i
(i = 1, ..., k) — характеристики надежности соответствующих
пороговых интервалов, вычисленные по формуле (4.3.53).
Величина δ
*
соответствует минимально допустимому отклонению
параметров данного МПЛЭ от их номинальных значений, при котором
этот МПЛЭ надежно функционирует. Естественно, что МПЛЭ
максимальной надежности должен иметь минимально возможное (для
заданной булевой функции) число порогов, поскольку диапазон
изменения взвешенного сигнала l(Х) ограничен (действительно, из
условия |U|=l сле-
дует, что ). Эксперименты на ЭВМ подтвердили это
соображение. На рис. 4.3.7 показана характерная экспериментальная
зависимость величины δ для МПЛЭ с разным числом порогов,
реализующего одну и ту же функцию.
Отсюда следует трудность технической реализации МПЛЭ с
большим числом порогов ввиду жестких требований, предъявляемых к
его компонентам. Это обстоятельство заставляет реализовать сложные
функции сетью из МПЛЭ.
Здесь следует отметить, что для максимизации надежности МПЛЭ
можно незначительно варьировать значения порогов Т. Для этого,
однако, нужно знать статистические свойства вариаций весов δU, и
сигналов δХ.
Пусть P
U
(δU) — плотность распределения случайных отклонений

весов U, a p
X
(δX) — плотность распределения случайных
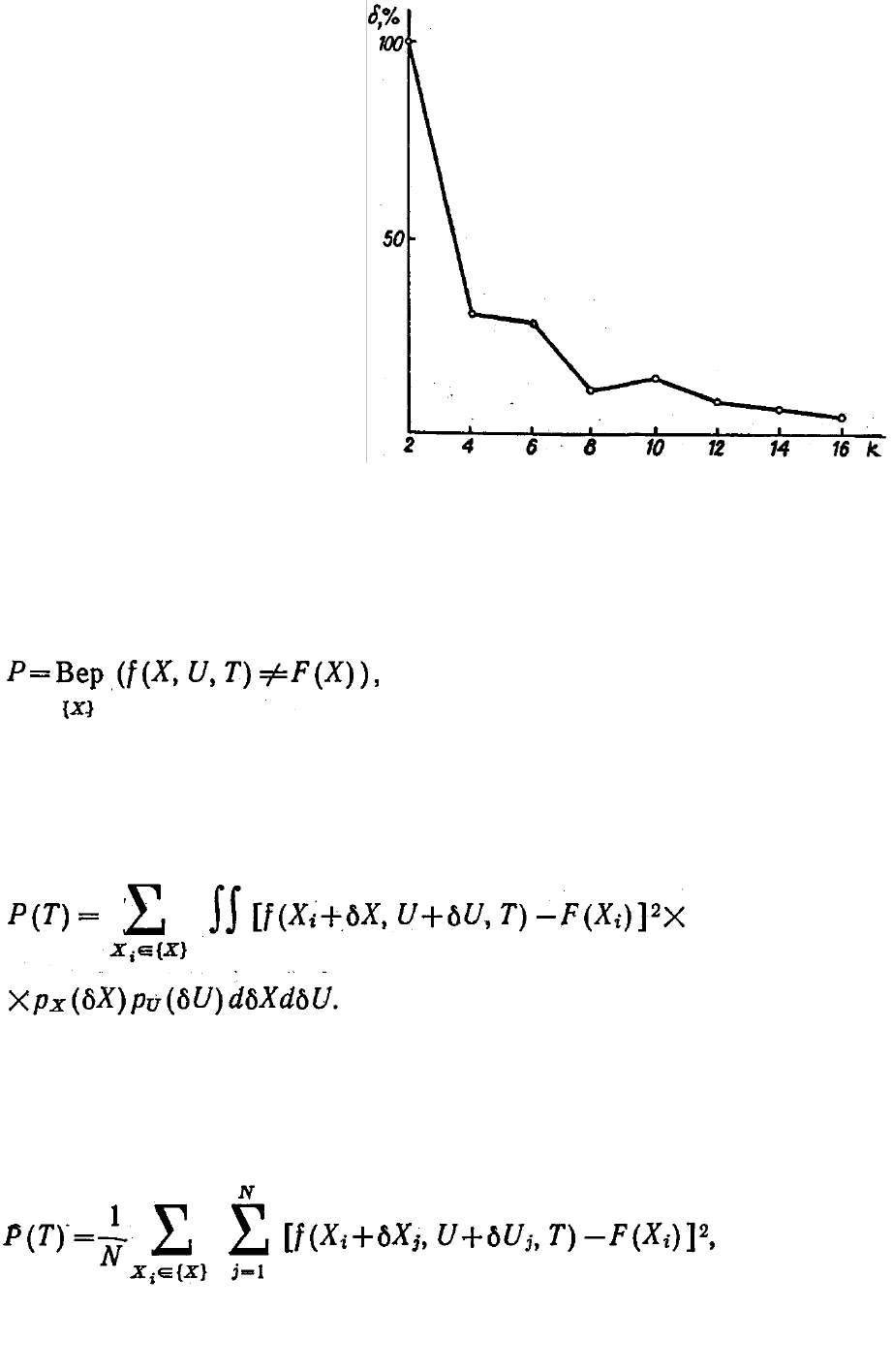
Рис. 4.3.7. Зависимость ха-
рактеристики надежности
МПЛЭ от числа порогов.
отклонений входных сигналов X. Обозначим буквой Р вероятность
ошибки при реализации всех входных сигналов {X}:
(4.3.56)
где F(X) — заданная логическая функция, a f(X,U,T) — функция,
реализованная данным МПЛЭ с весами U и порогами Т.
Вероятность Р зависит от порогов Т, и ее можно вычислить с
помощью интеграла:
(4.3.57)
Аналитическая оценка этого интеграла, очевидно, будет
представлять большие трудности. Поэтому удобно воспользоваться
методом Монте-Карло:
(4.3.58)
где N — база
оценки, а δX
j
и δU
j
— реализация случайных
отклонений сигналов и весов в соответствии с заданными плотностями
распределений р
X
(δХ) и p
U
(δU).
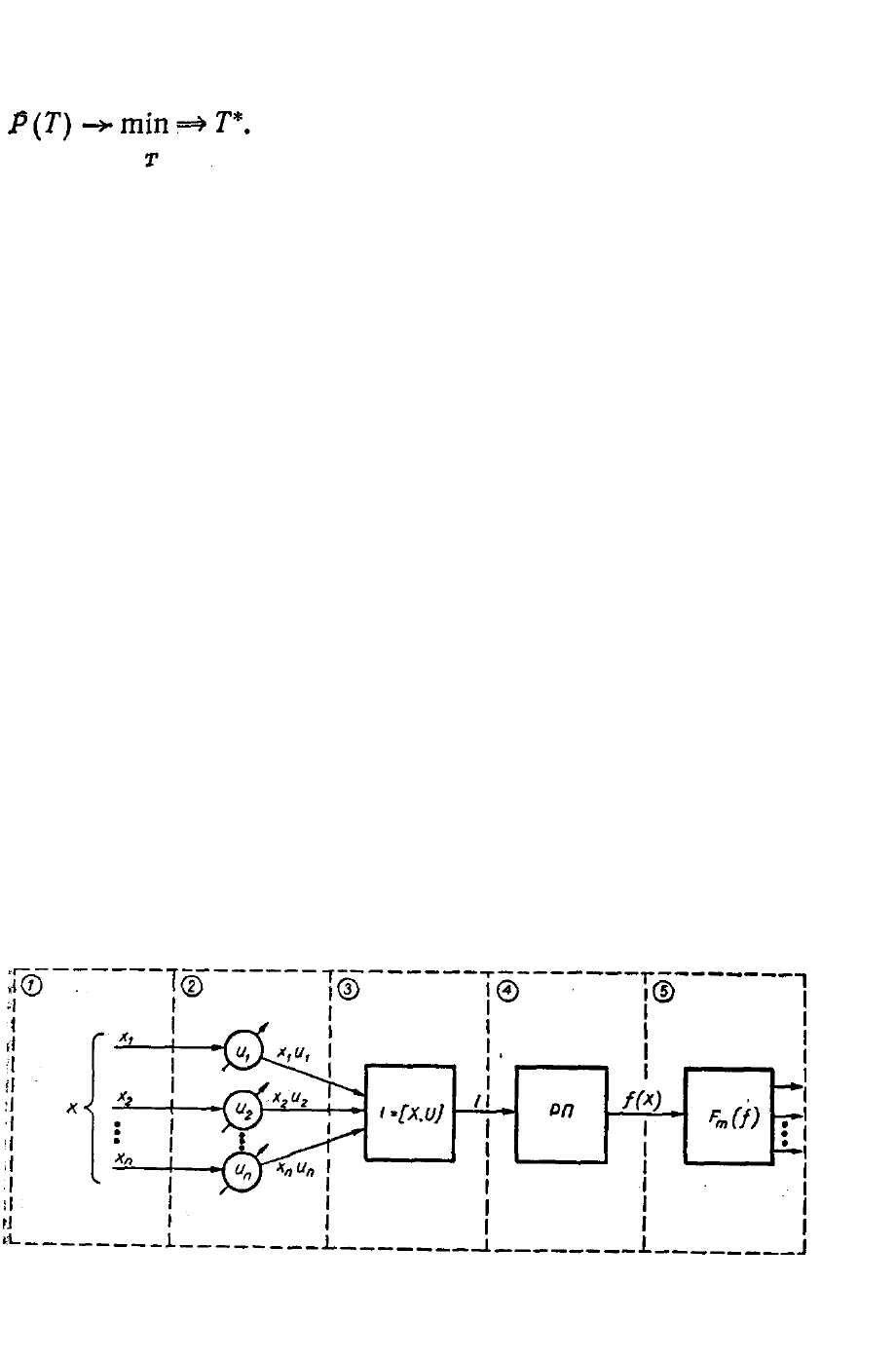
Теперь задача синтеза надежного МПЛЭ формулируется
следующим образом:
(4.3.59)
Как видно, это задача оптимизации в обстановке случай-дых
помех, генерируемых монте-карловской оценкой. Как отмечено в § 3.2,
дисперсия этой помехи уменьшается с ростом базы оценки N как 1/N,
что позволяет управлять уровнем помехи в процессе оптимизации.
Решать эту k-мерную оптимизационную задачу следует одяим из
методов параметрической адаптации, рассмотренных в § 4.1, что дает
возможность определить оптимальные пороги Т*.
Таким образом, применение методов параметрической адаптации
позволяет синтезировать оптимальные МПЛЭ по различным
критериям: числу порогов (4.3.14) и надежности (4.3.59). В обоих
случаях случайный поиск является эффективным инструментом
синтеза: минимизируемые функции всегда достаточно сложны, что
создает наиболее благоприятную ситуацию для использования
случайного поиска.
4.3.8. Многозначные
многопороговые логические элементы*
Многозначные логические элементы отличаются более чем двумя
выходными уровнями, т. е. являются небулевыми элементами. На рис.
4.3.8 показана пятиэлементная модель многозначного МПЛЭ с
функционально неполными операторами l и F
m
(смысл их будет
раскрыт ниже) и многозначным структурным алфавитом [22]. Эта
модель имеет:
Рис. 4.3.8. Блок-схема многозначного МПЛЭ.
* Этот подраздел по просьбе автора написан А. Т. Бахаревым.
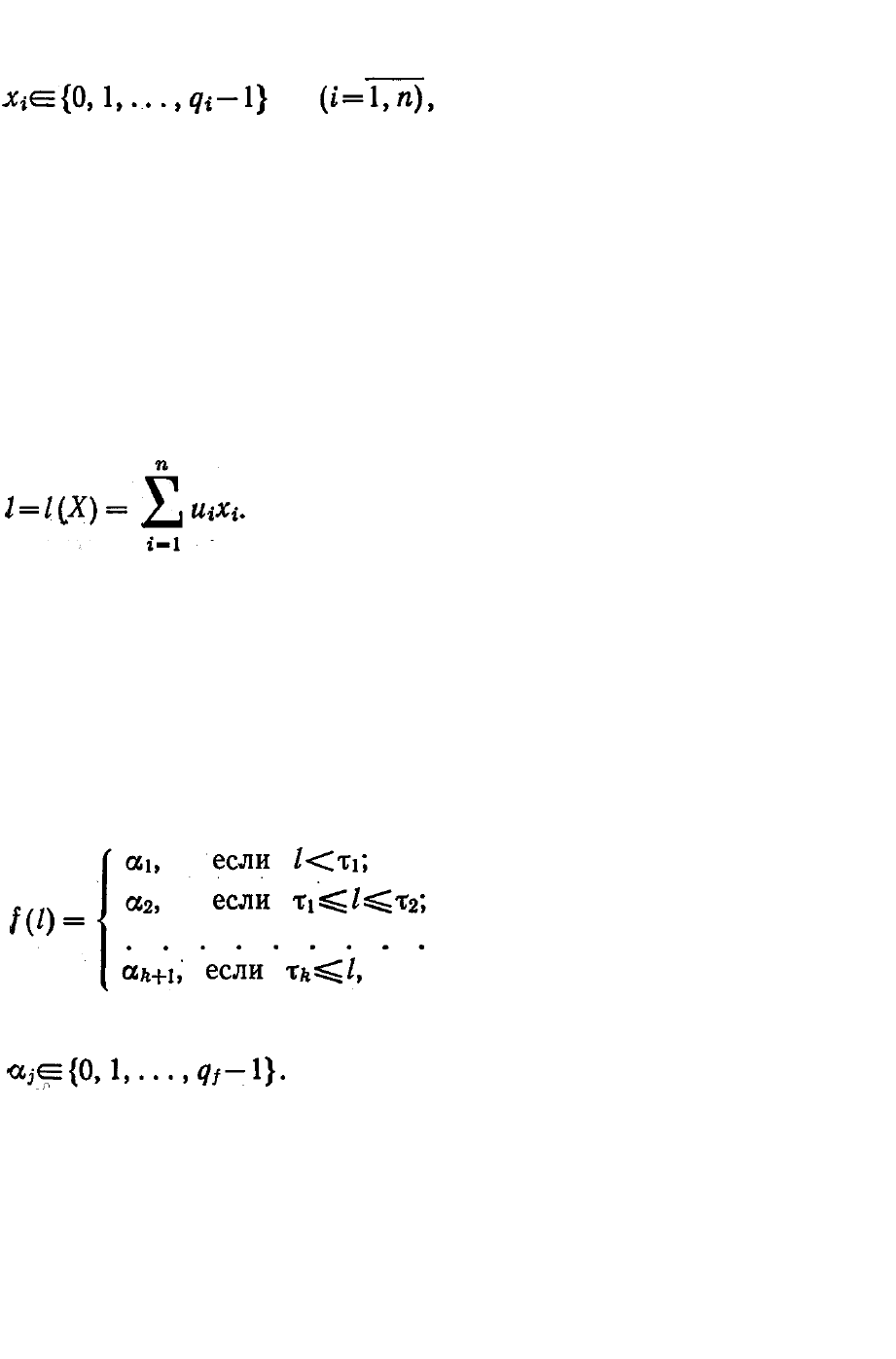
1. Входной элемент из n входов, вообще говоря, разной знач
ности:
(4.3.60)
образующих входной вектор
X = (x1, ..., x
n
). (4.3.61)
2. Элемент усиления входных сигналов x
i
с коэффициен
тами u
i
, образующими вектор весов входов
U = (u
1
, ..., u
n
), (4.3.62)
где в общем случае u
i
— действительные числа.
3. Элемент формирования входной композиции — свертки
(4.3.63)
4. Элемент решающего правила
характеризуется настраиваемым вектором порогов
T = (τ
1
, ..., τ
k
). (4.3.64)
Здесь τ
1
< ... < τ
k
. Этот вектор реализует логическое преобразование
l → f = f (l) (4.3.65)
в виде
(4.3.66)
(4.3.67)
На рис. 4.3.9 показан характерный вид функции
f.
5. Выходной элемент формирует настраиваемые выходные
сигналы
F
m
= F
m
(f), m < q
f
(q
f
- 1)
k
, (4.3.68)
т. е. функции F являются производными от f (задающей функции) и
могут отличаться от нее лишь значениями α
j
на
где
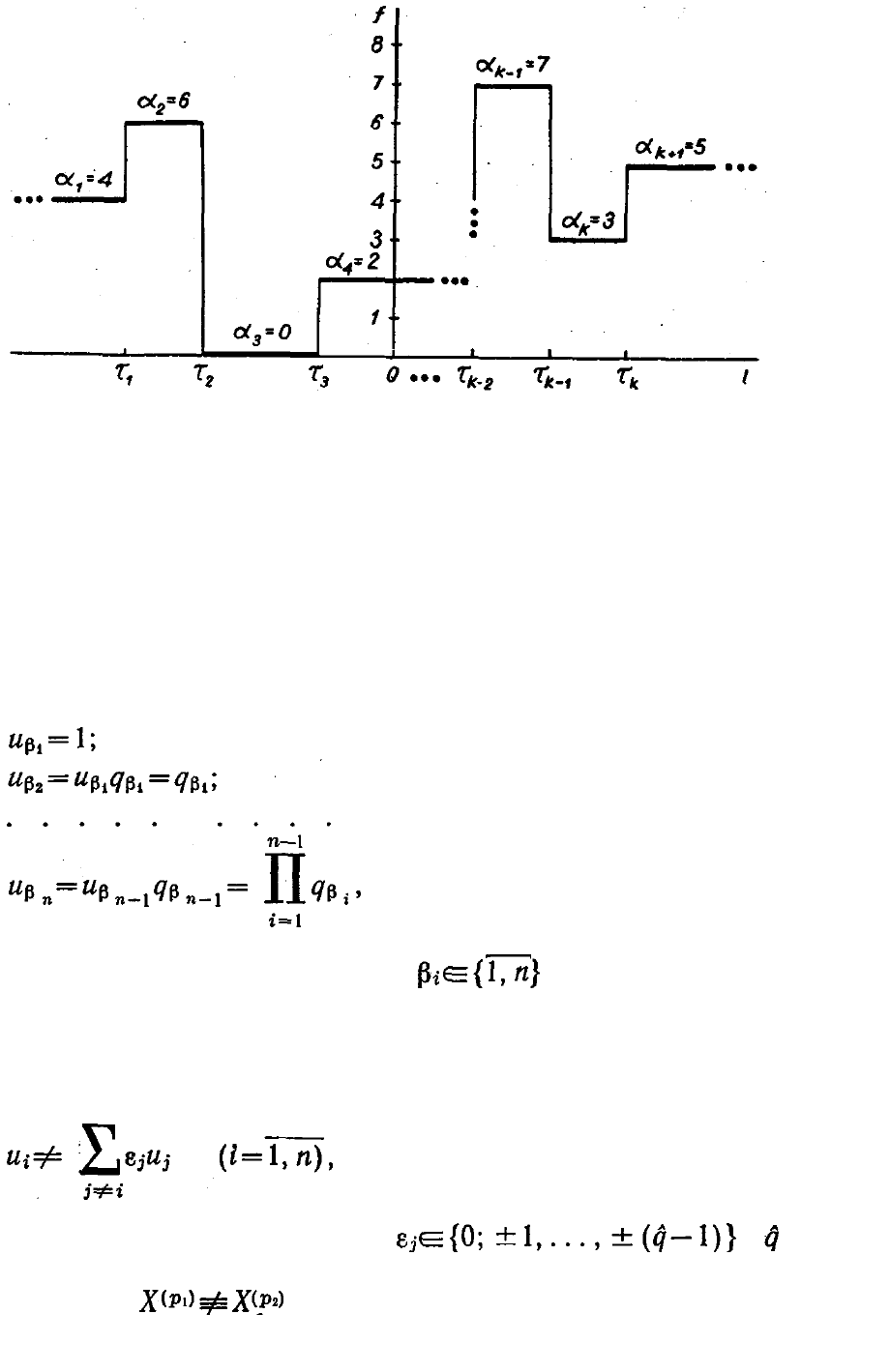
Рис. 4.3.9. Пример функции f многозначного МПЛЭ.
соответствующих пороговых интервалах. Эта модель и ее частные
случаи рассмотрены в работах [14, 15, 22—24]. Модель является
функционально полной и обладает свойствами многоустойчивых и
многофункциональных моделей. Алгоритм синтеза такой модели для
реализации произвольной логической функции почти полностью
аналогичен рассмотренному выше для двузначных (булевых) функций,
достаточно лишь в качестве компонент канонического вектора U взять
следующие числа:
(4.3.69)
где , т. е. нумерация компонент
произвольна (количе-
ство всех возможных перенумераций равно n!). В общем случае
компоненты вектора U должны удовлетворять условию линейной
независимости
(4.3.70)
где , = max
(q
1
, ..., q
n
). Тогда l
p1
≠
≠ l
p2
, если , т. е. свертка отображает множество всех
возможных векторов X
(S)
на строго различные точки на числовой оси
Основное свойство этого
алгоритма заключается в том, что
он позволяет сразу решить задачу
синтеза логического элемента для
произвольной логической
функции, хотя и не обеспечивает
минимальность числа порогов, т.
е. минимальную размерность
вектора Т (4.3.64). Кроме того,
процедура синтеза стандартна (не
зависит от специфики реализуе-
мой функции), проста и удобна
для программирования на ЭВМ.
Минимизация числа порогов
здесь производится аналогично
изложенному в подразделе 4.3.2.
Задача оптимального синтеза
многозначных МПЛЭ .
формулируется, как рассмотрено
выше для МПЛЭ, в виде (4.3.14).
Проблема разбиения про-
странства весов входов на
индексные зоны в многозначном
случае значительно сложнее,
нежели в двузначном: количество
индексных зон с ростом п и q
i
быстро возрастает (практически
определить все индексные зоны для n≥6 невозможно даже на ЭВМ
независимо от значности q
i
≥2), а их геометрические размеры на
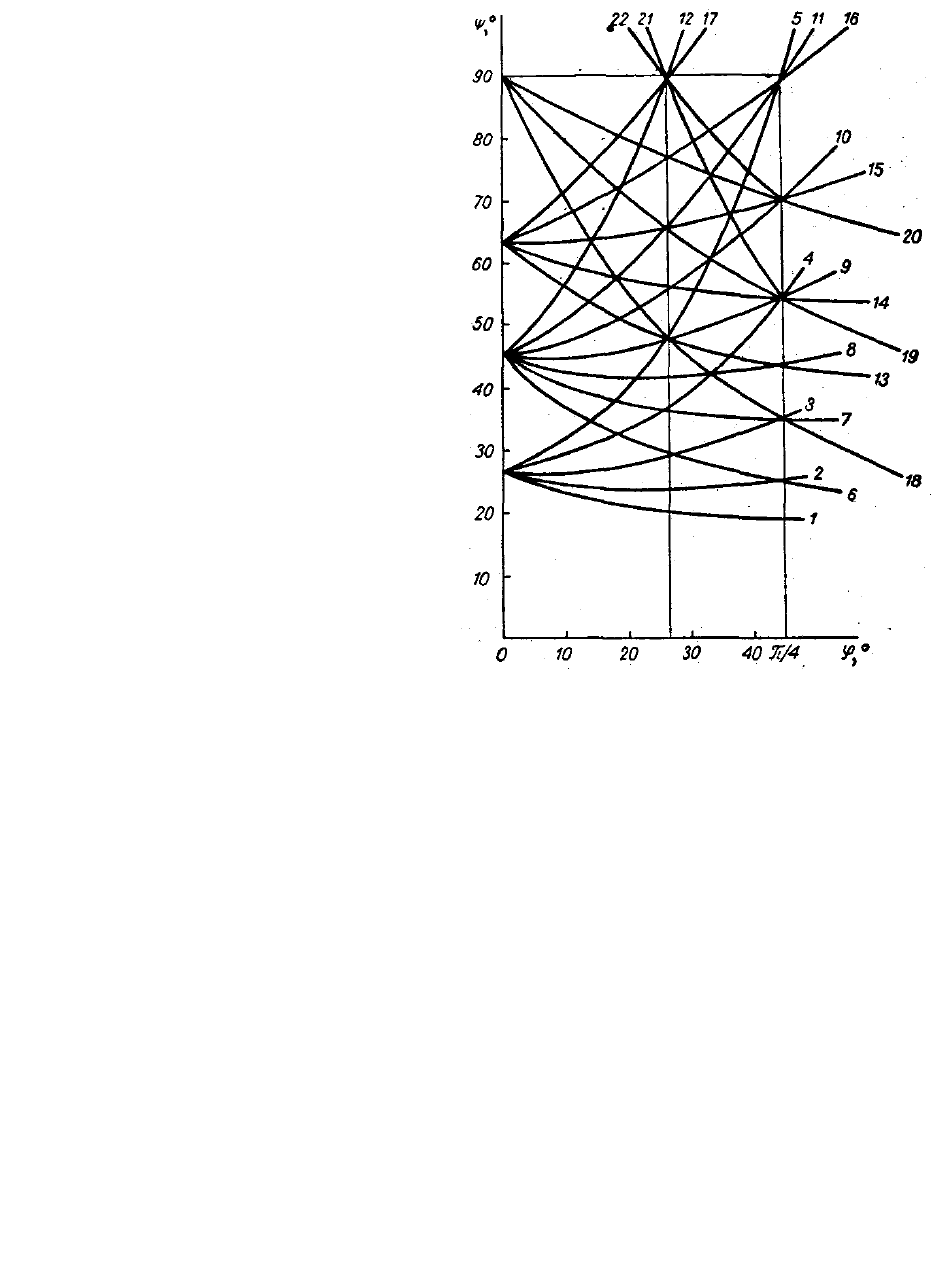
единичной гиперсфере, естественно, уменьшаются. На рис. 4.3.10
показаны все 78 индексных зон для случая q
1
=q
2
=q
3
=3 (n=3) в полосе
0≤φ≤π/4, 0≤ ≤ψ≤π/2 при записи компонент вектора U в сферических
координатах.
Уравнения некоторых разделяющих кривых имеют следующий вид
[14]:
1. 2 (sin φ + соs φ) = ctg ψ;
2. sin φ + 2 cos φ = ctg ψ;
. . . . . . . . . . . . . .
7. sin φ + cos φ = ctg ψ;
. . . . . . . . . . . . .
Р
ис. 4.3.10. Индексные зоны трех-
уровневого трехвходового элемента.
Уравнения границ заданы формулами
(4.3.71).

9. cos φ = ctg ψ; (4.3.71)
. . . . . . . . . . . . . .
11. cos φ — sin φ = ctg ψ;
. . . . . . . . . . . . . .
19. sin φ = ctg ψ;
. . . . . . . . . . . . . .
21. 2 sin φ — cos φ = ctg ψ;
22. 2 sin φ — cos φ = 2 ctg ψ.
Отметим, что кривые 7, 9, 11 и 19 соответствуют рассмотренному
ранее случаю q
1
= q
2
= 2, n=3 на рис. 4.3.4. В ситуации, когда с ростом
размерности модели количество индексных зон быстро возрастает,
возникает задача исключения полного перебора всех индексных зон с
целью решения задачи оптимизации числа порогов модели.
Поисковые методы вообще и метод случайного поиска в частности
являются, вероятно, единственно возможным подходом к решению
этой задачи. Заметим, что точное определение значения
характеристики надежности δ, рассмотренной ранее, представляет
большую трудность даже для моделей малой размерности и
выполняется, как правило, только поисковыми методами.
Аппарат индексных зон позволяет интерпретировать специ-
фические свойства пороговых структур — функциональную ус-
тойчивость и адаптивность (свойственные биологическим фено-
менам). Предположим, что на вектор U действует некоторый
случайный дестабилизирующий фактор среды ∆U, изменяющий его, а
флюктуации компонент вектора Т несущественны либо сводятся к
фактору среды. Если фактор ∆U не выводит вектор U за пределы
фиксированной индексной зоны, то он .не может изменить выходную
характеристику f модели, что соответствует функциональной
устойчивости схемы. С другой стороны, если этот фактор выводит
вектор U в другую индексную зону, то выходная характеристика
логического элемента может существенно измениться.
Уменьшение функциональной устойчивости порогового элемента
с ростом его размерности эквивалентно известному в пороговой
логике факту малой надежности пороговых устройств с большим
числом входов [77], отмеченному выше. Этим, в частности, можно
объяснить многочисленные неудачи конструирования реальных
пороговых устройств с большим коэффициентом надежности,

который, как правило, принципиально недостижим. С другой стороны,
вероятностный подход к данной проблеме, заключающийся в учете
частот ошибок на всех входных наборах и частот, с которыми эти
наборы появляются, показал [125], что снижение надежности
порогового элемента в резуль-