Пьявченко Т.А., Финаев В.И. Автоматизированные информационно-управляющие системы
Подождите немного. Документ загружается.

151
имеет вид:
o
y
2
-pτ
рег o ид и
и oy μ
KK(TTp+Tp+1)
W(p) = e
Tp(T p+1)(Tp+1)
, (82)
запишем выражения для амплитудно-частотной А(ω) и фазочастотной
ϕ(ω) характеристик [65]:
22 22
рег o иид
22 22
и oy μ
KK Tω +(1-TTω )
A(ω)=
T ω (T ω + 1)(T ω +1)
, (83)
oy oy μ
π
j(ω)=- -ωτ -arctg(ω×T )-arctg(ωT)+
2
и
2
ид
T ω
+arctg
(1 - T T ω )
(84)
Используя выражения (83) и (84), решим поставленную задачу.
Определив значения постоянные времени регулятора как
Т
И
=Т
ОУ
, Т
Д
=τ
ОУ
, (85)
запишем выражение (84) для частоты среза ω
ср
в виде
cp cp oy cp oy
π
j(ω )=- -ωτ -arct
g
(ω T)-
2
oy cp
cp
2
oy oy cp
T ω
+arctg = -π +
γ
(1- T τω)
(86)
Представив уравнение (86) как
oy cp
cp oy cp μ
2
oy oy cp
T ω
-arctg(ω T)-arct
g
(ω T)+arct
g
=
(1 - T τω)
cp cp oy
π
=- +
γ
+ ωτ
2
(86.а)
или
32 2
cp μ cp oy oy oy oy μμoy
2224
oy oy oy cp oy oy μ cp
-ω T+ω (T τ + τ TT-TT)
arct
g
=
1+(T -T τ )ω +T τ T ω
cp cp oy
π
=- +
γ
+ ωτ
2
, (86.б)
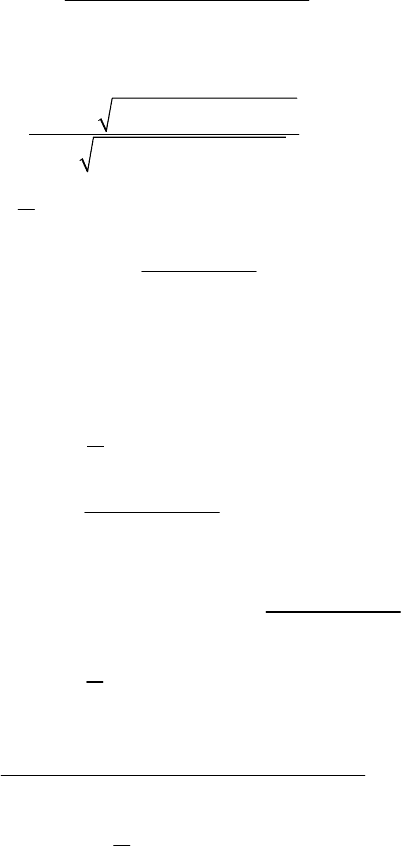
найдем его решение графическим способом, задавая значение γ
ср
и
используя программный пакет MatLab. Решение приведено на рис. 35.
152
Рис. 35
Координата точки пересечения двух кривых (первой кривой – для
левой части уравнения (86.б), второй – для его правой части) по оси
абсцисс даст значение частоты среза ω
ср
, на которой запас по фазе
равен заданному.
Поскольку на частоте среза амплитудно-частотная характеристика
А(ω
ср
) равна единице, то из выражения (83) после подстановки в него
значений (85) и ω
ср
можно найти величину коэффициента К
РЕГ
.
22 22
oy cp oy cp μ cp
рег
22 22
o oycp oyoycp
T ω (T ω +1)(T ω +1)
K=
KTω +(1-T τω)
. (87)
Итак, формулы (85), (86) и (87) позволяют рассчитать параметры
настройки К
РЕГ
, Т
И
, Т
Д
алгоритма (81), обеспечивающие
апериодический переходный процесс в системе управления,
построенной для объекта с транспортным запаздыванием [65].
Пример 6. Рассчитать параметры закона (81) для системы
управления со следующими коэффициентами заданной части:
Т
ОУ
=600 с, τ
ОУ
=50 с, К
О
=2, Т
ДАТ
=60 с, Т
СП
=30 с, обеспечив
апериодический переходный процесс c минимальным
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
1
1
0
0
*
*
1
1
0
0
-
-
3
3
-
-
0
0
.
.
2
2
5
5
-
-
0
0
.
.
2
2
-
-
-
-
-
-
0
0
.
.
0
0
0
0
.
.
0
0
5
5
0
0
.
.
1
1
0
0
.
.
1
1
5
5
0
0
.
.
2
2
ϕ
ϕ
(
(
ω
ω
)
)
ω
ω
1
1
2
2
ω
ω
c
c
p
p
153
перерегулированием (не более 5%) и длительностью t
р
, отвечающей
условию:
Т
ОУ
≤t
P
≤3Т
ОУ
. (88)
Указанные требования связаны с тем, что для большинства
технологических процессов обычно не предъявляются жесткие
требования к быстродействию, т.к. выход на режим определяется
технологией самого процесса. А переходный процесс с
перерегулированием не более 5%, названный в литературе [66]
технически оптимальным, обеспечит экономный расход энергии.
Решение. Постоянная времени эквивалентного инерционного звена
Т
μ
=Т
ДАТ
+Т
СП
=90 с. Принимаем запас по фазе γ
ср
=75°=π/2,4 и,
используя пакет MatLab, из графического решения уравнения (86.б)
получаем значение частоты ω
ср
, равное 0?0027с
1
. После чего по
уравнению (87) для полученной величины ω
ср
вычисляем значение
параметра настройки К
РЕГ
=0,8835.
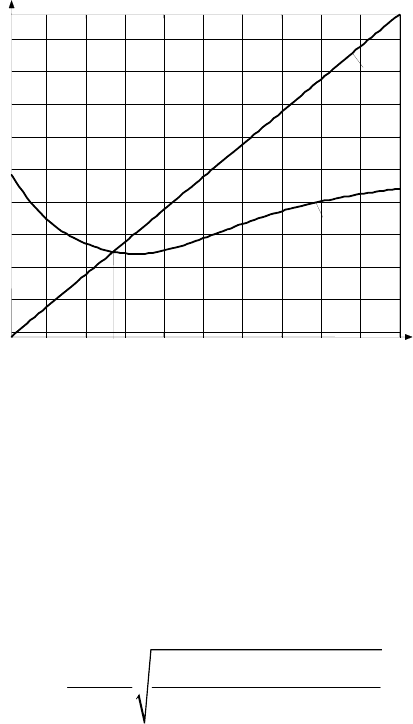
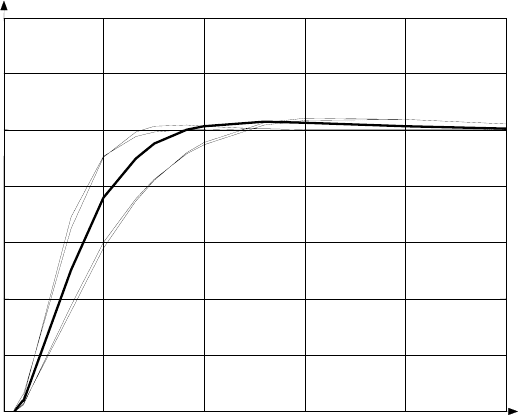
Моделирование рассматриваемой системы в среде SIMULINK
пакета MatLab подтвердило возможность получения апериодического
переходного процесса (см. рис. 36) заданной длительности (88) с
минимальным перерегулированием для САУ, использующей в
управляющем устройстве ПИД закон управления (81), значения
параметров настройки которого рассчитаны по предложенной
методике.
Поскольку значения параметров модели заданной части системы
могут отличаться от истинных в силу различного
рода погрешностей,
например, погрешностей измерения или неточностей аппроксимации
характеристик объекта в процессе идентификации, то возникает
неопределенность [67]. Следовательно, точные значения параметров
заданной части системы остаются неизвестными. Однако можно
указать интервалы, в которых они должны находиться, т.е.
K
imin
≤K
i
≤K
imax
,,
T
imin
≤T
i
≤T
imax
.
154
500 1500 2000 2500
0
0.2
0.4
0.6
0.8
1
1.2
1.4
h(t)
t
, c
1000
Рис. 36
Для исследования линейных систем с интервальными параметрами
вводят понятие робастной устойчивости, оценку которой выполняют,
пользуясь критерием Харитонова [67]. Из-за наличия в объекте
транспортного запаздывания применить этот критерий к
рассматриваемой системе не представляется возможным. Поэтому, по
аналогии с указанным критерием, предлагается исследовать робастную
устойчивость путем моделирования этой системы с передаточными
функциями заданной
части, имеющими коэффициенты, равными
граничным значениям интервальных параметров
oy oy
-p[ τ , τ ]
oo
рег
oy oy μμ
[K ,K ]
W(p) = W (p) e
([T , T ]p + 1)([T ,T ]p + 1)
.(89)
Границы интервалов задают как
⎫
⎪
⎬
⎪
⎭
ii min ii
ii max ii
C=C =(1-δ )C ,
C=C =(1+δ )C ,
(90)
где C
i
– значение параметраC, полученное в результате идентификации
объекта, δ
i
– относительное значение погрешности, равное, например,
0,2 при ± 20-и процентном интервале.
При этом получатся четыре передаточные функции следующего
вида:
155
⎫
⎪
⎪
⎪
⎪
⎪
⎪
⎬
⎪
⎪
⎪
⎪
⎪
⎪
⎭
oy
oy
oy
oy
-pτ
o
1 рег
oy μ
-p τ
o
2 рег
oy μ
-p τ
o
3 рег
oy μ
o
-p τ
4 рег
oy μ
K
W(p)=W (p) e ,
(T p +1)(T p +1)
K
W(p)=W (p) e ,
(T p +1)(T p +1)
K
W(p)=W (p) e ,
(T p +1)(T p +1)
K
W(p)=W (p) e .
(T p+1)(Tp+1)
(91)
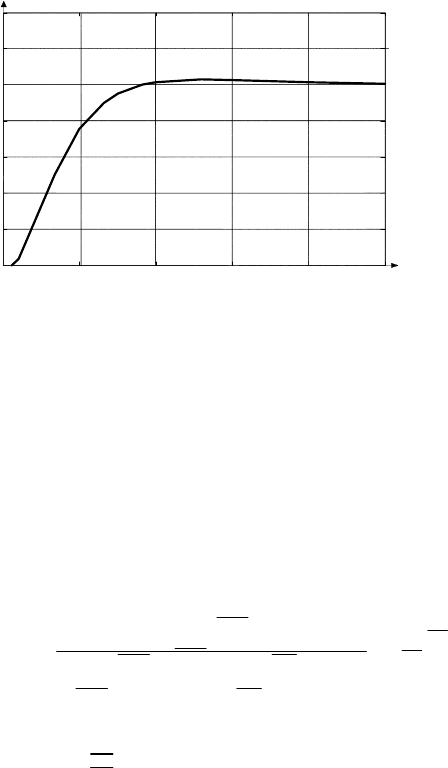
На рис. 37 представлены графики переходных процессов для
замкнутой системы с передаточными функциями (99). Номер графика
соответствует номеру передаточной функции. Нулем обозначена
кривая, соответствующая исходным параметрам (см. рис. 36).
Результаты моделирования показали, что САУ, использующая ПИД
закон управления со значениями коэффициентов настройки,
рассчитанными по предложенной методике, даже при 20-и процентном
разбросе параметров объекта
является робастно устойчивой и
обеспечивает приемлемое качество переходного процесса [65].
Следует отметить, что по предложенной методике могут быть
рассчитаны параметры любых линейных регуляторов.
3.3.2. Модальное управление. Управляющее воздействие
u=g-k
T
x=g=k
1
x
1
-k
2
x
2
-…-k
n
x
n
(92)
будет называться модальным, если коэффициенты k
i
, i=1,2,…n
выбраны по заданным исходя из степени устойчивости η корням
характеристического полинома замкнутой системы [67, 68]. Как видим,
реализация в микроконтроллере такого управления не вызывает
особых трудностей, если все переменные состояния x={x
1
,x
2
,…,x
n
}
доступны измерению и объект является полностью управляемым.
156
Рис. 37
Например, управление исполнительным устройством – мотором,
работающим с переменной частотой вращения, может осуществляться
по трем переменным состояния: углу поворота, частоте вращения и
току якоря, поскольку все указанные переменные могут быть
измерены с помощью соответствующих датчиков.
3.3.3. Алгоритм нечеткого регулирования. Нечеткие логические
регуляторы (НЛР) используются при управлении объектами, для
которых
либо сложно получить математическую модель, либо объект
содержит существенно нелинейные характеристики [69]. Часто
нечеткий регулятор используют для управления объектом, параметры
которого имеют качественное описание.
Для формирования в НЛР управляющего воздействия необходимо
осуществить следующие действия [70]:
1. Получить величину отклонения (рассогласования) ε истинного
значения регулируемой координаты y от требуемого g;
2. Преобразовать значения отклонения
к нечеткому виду:
«большое», «среднее», «малое»;
0
0
5
5
0
0
0
0
1
1
0
0
0
0
0
0
1
1
5
5
0
0
0
0
2
2
0
0
0
0
0
0
2
2
5
5
0
0
0
0
0
0
0
0
.
.
2
2
0
0
.
.
4
4
0
0
.
.
6
6
0
0
.
.
8
8
1
1
1
1
.
.
2
2
1
1
.
.
4
4
h
h
(
(
t
t
)
)
t
t
,
,
c
c
0
0
1
1
2
2
3
3
4
4
157
3. Оценить приращения управления по заранее сформулированным
нечетким правилам принятия решения4
4. Вычислить значение кода управления, необходимого для
регулирования процесса.
Значение управляющего воздействия u на i–м шаге формируется в
соответствии с алгоритмом
⎫
⎬
⎭
iggimmissi
ii-1 i
du = k du + k du + k du
u=u +du
, (93)
в котором k
g
, k
m
, k
s
- коэффициенты принадлежности рассогласования
ε к категориям «большое», «среднее» и «малое» соответственно; du
gi
,
du
mi
, du
si
- приращение управления по условию «большое», «среднее»
и «малое» отклонение соответственно.
Каждое из указанных приращений рассчитывается по следующей
формуле:
du
μi
=K
μ
sign(g-y), (94)
где μ - признак категории рассогласования g, m или s. Коэффициенты
K
μ
подбираются в результате экспертных оценок. Наличие в
выражении (93) накопления приращений равнозначно введению в
закон управления астатического звена (интегратора), что позволяет и в
нечетком регуляторе теоретически обеспечивать нулевую статическую
ошибку.
3.3.4. Адаптивное управление. При изменениях параметров ТП в
широких пределах классические системы регулирования, построенные
с использованием обычных ПИД-регуляторов, не могут
обеспечивать
высокие требования к качеству процесса управления, а в некоторых
случаях – вообще устойчивое регулирование их режимов [69].
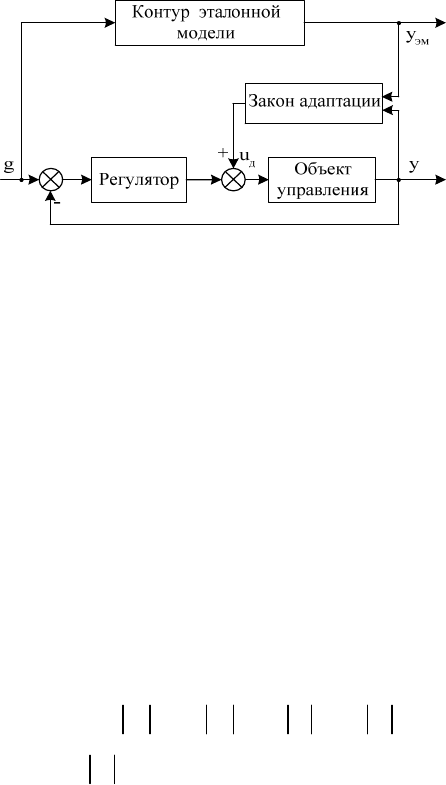
Качественное регулирование такого объекта можно обеспечить,
например, применением адаптивной системы управления с эталонной
моделью, которая задает желаемую траекторию движения реального
объекта. В этом случае система должна включать как контур
управления, так и контур, обеспечивающий подстройку
параметров
регулятора таким образом, чтобы минимизировать рассогласование
между выходом эталонной модели и выходом управляемого процесса
(рис. 38).
Закон адаптации должен обеспечивать асимптотическую
устойчивость и минимальное время сходимости переходного процесса
в системе к реакции эталонной модели. Указанные требования можно
158
удовлетворить, если для формирования закона адаптации u
Д
использовать второй метод Ляпунова [71].
Рис. 38
Процедура разработки закона адаптации заключается в следующем.
1. По параметрам нестационарной модели ОУ подбирается
эталонная модель с желаемыми показателями переходного процесса
системы управления.
2. Записывается уравнение системы с эталонной моделью
относительно ошибки адаптации.
3. Выбирается функция Ляпунова и записывается условие
отрицательности ее производной.
4. На основании п. 3 записывается выражение для дополнительного
управления u
Д
.
5. Определяется уравнение линии переключения.
6. Рассчитываются коэффициенты, и получается аналитическая
запись закона управления, подлежащего реализации.
В результате выполнения перечисленных процедур аналитическая
запись закона управления может выглядеть аналогично выражению,
полученному в частном примере [19]:
2312
д x2 x3 ε 1 ε 2
u=(g x+g x+q ε +q ε +
3
ε 3112233
+q ε )si
g
n(b ε +b ε +b ε )
, (95)
где ε - рассогласование между выходом эталонной модели и выходом
управляемого процесса.
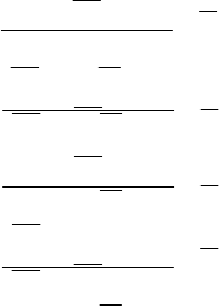
3.3.5. Релейное управление. Релейное управление является
наиболее простым в реализации и экономичным в эксплуатации

159
способом управления: сигнал рассогласования подается на
исполнительную часть системы прерывно, причем возможны только
три значения управляющего воздействия: максимальное
положительное, максимальное отрицательное и нулевое (рис. 39).
Рис. 39
Релейные системы по самому принципу своему являются
нелинейными, поскольку моменты времени, в которые происходит
замыкание и размыкание системы, заранее неизвестны; они не
задаются извне, а определяются внутренними свойствами самой
системы (ее структурой и величинами ее параметров). К тому же их
поведение, в отличие от линейных систем, зависит от начальных
условий. Этим обуславливаются и основные специфические
особенности динамики процессов регулирования в релейных системах.
В отличие от линейных, в них может возникать режим устойчивых
автоколебаний.
Представленные на рис. 39 статические характеристики определяют
работу мотора (исполнительного устройства системы) с напряжением
питания U
M
. Если токи срабатывания I
СР
и отпускания I
ОТП
реле не
совпадают (рис. 39.б), то появляется петля гистерезиса, которая
способствует возникновению режима автоколебаний. Для их
устранения вводят дополнительную обратную связь по частоте
вращения мотора. Убрать статическую ошибку, обусловленную зоной
нечувствительности реле, можно только обеспечив идеальную
релейную характеристику (рис. 39.в). Очевидно, осуществить это
возможно, реализовав релейное управление на микроконтроллере.
160
3.4. Алгоритмическая структура локальной системы с
цифровым устройством управления
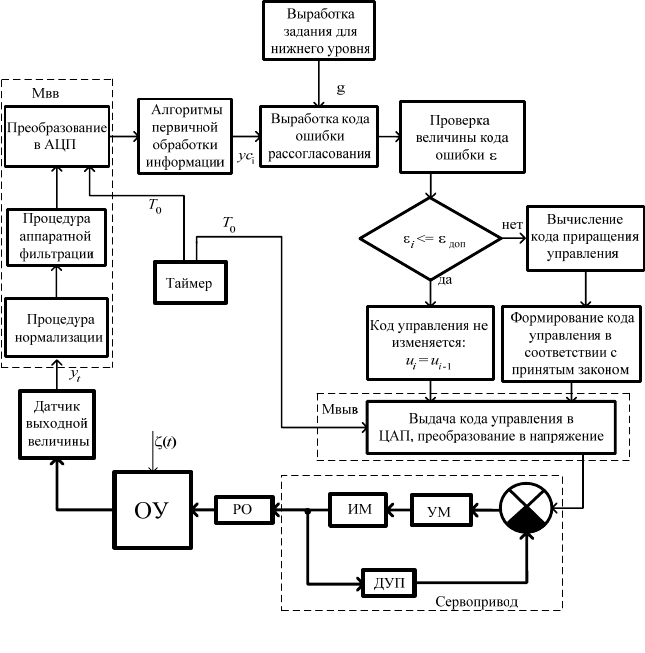
В результате анализа процессов контроля и управления для
одномерного объекта можно представить алгоритмическую структуру,
отражающую последовательность процедур от момента опроса
датчика до момента выдачи управляющего сигнала на сервопривод в
виде, показанном на рис 40.
Рис. 40
На рис. 40 к технической структуре заданной части системы,
состоящей из сервопривода (исполнительного механизма ИМ,