Protection Application Handbook (англ. яз.)
Подождите немного. Документ загружается.


VOLTAGE DROP IN SECONDARY CABLING.
Voltage Transformers
for worldwide cooperation
261
BA THS / BU Transmission Systems and Substations
LEC Support Programme

VOLTAGE DROP IN SECONDARY CABLING.
262
BA THS / BU Transmission Systems and Substations
LEC Support Programme
INTRODUCTION
CT Requirements
for worldwide cooperation
263
BA THS / BU Transmission Systems and Substations
LEC Support Programme
1. INTRODUCTION
Many types of protection relays are used in a power system. Dif-
ferential protection relays, distance protection relays, overcurrent
protection relays of varying types etc. will all have different re-
quirements on the current transformer cores depending on the
design of the individual protection relay.
Instantaneous and delayed protection relays will also have differ-
ent requirements. A DC component of the fault current need often
to be considered for the instantaneous types of protection relays.
Modern solid-state protection relays, of static or numerical types,
provides a much lower burden on the current transformer cores
and often also have lower requirements on the core output as
they normally are designed to operate with saturated CT cores
which was not the case for the old types of electro-mechanical re-
lays
Hereafter follows a briefing of requirements that modern ABB sol-
id state protection relays will set on current transformer cores. For
special types we further refer to manuals for the respective relay
and to tests of behavior at saturated current transformers per-
formed with the different products.
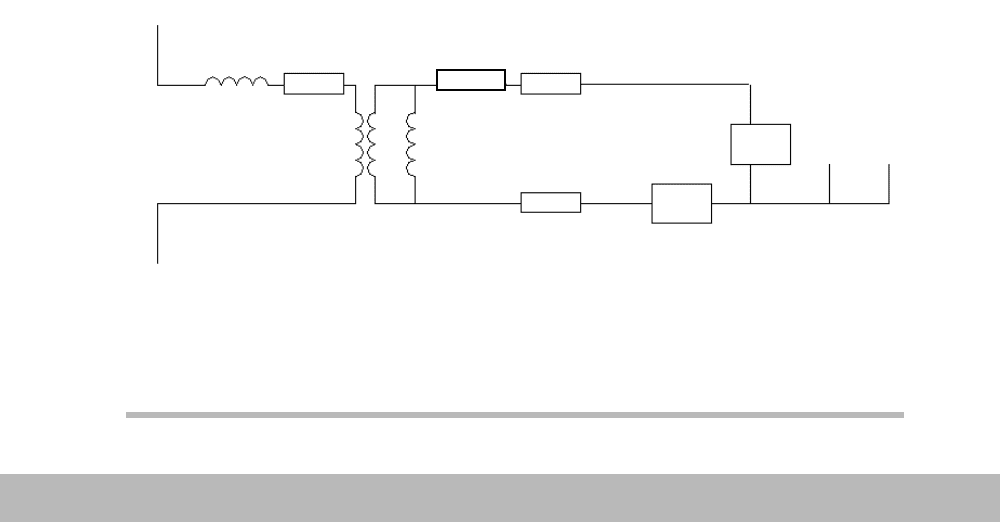
To explain the general expressions used we will show a normal
current transformer circuit.
Figure 1. The current transformer principle circuit with magnetizing reac-
tance and secondary resistance.
OTHER
PHASES
R
L
R
R
R
N
R
L
R
CT
R
P

OVERCURRENT PROTECTION RELAYS
264
BA THS / BU Transmission Systems and Substations
LEC Support Programme
For phase to phase faults the loop-resistance will include the ca-
ble resistance “
R
L
” plus the resistance of Phase measuring relays
“R
R
+ R
CT
”.
For phase to earth fault loops the resistance will include two
times the cable resistance “
R
L
+R
l
” plus the total resistance of
Phase and Neutral measuring relays “
R
R
+R
N
+ R
CT
”.
Core voltage output can either be the knee-point voltage, if
known, or the secondary voltage output “
E
2
” calculated with help
of 5P or 10P data, ALF and the secondary resistance according
to:
E
2
= ALF x I
n
(R
CT
+ R
n
)
where
“
E
2
” is the secondary limiting emf
“I
n
” is the CT rated secondary current
“R
CT
” is the CT secondary resistance at 75°C and
“R
n
” is the CT rated burden, calculated as resistance.
Normally, modern relays provides a pure resistive burden.
Of course values given in ANSI, or other standards, can be used
in similar ways to calculate the cores secondary output and the
achieved value can be used instead. The differences in the volt-
age output at selected definition of core is of size some 10-20%
and is not of importance for the calculation.
2. OVERCURRENT PROTECTION RELAYS
Overcurrent relays are used both as short-circuit and earth-fault
protection. They can be instantaneous or delayed, definite- or in-
verse time. Current transformer cores must give sufficient output
to ensure correct operation.
OVERCURRENT PROTECTION RELAYS
CT Requirements
for worldwide cooperation
265
BA THS / BU Transmission Systems and Substations
LEC Support Programme
The required CT core output is given below:
INSTANTANEOUS PROTECTION Core shall not saturate for an AC
current, smaller than
“2xI
set
”. The DC component doesn’t need to
be considered as ABB overcurrent relays are designed with short
impulse limit time to secure operation also when only a very short
current pulse is achieved due to heavy saturated current trans-
former cores. Due to high setting of instantaneous stages the re-
quirement often will be quite high.
INVERSE TIME DELAYED OVERCURRENT PROTECTION RELAYS
Core may not saturate for an AC current less than “20xI
set
”.
The 20 times factor is required to ensure that the inverse time
characteristic will be correct and no extra delay will be introduced
in some relay (due to saturation in a CT core). Such a delay
would mean a lack of selectivity. If required, the factor 20 can be
changed to “the Maximum fault current of interest for selectivity
divided by the Set current”.
DEFINITE-TIME DELAYED OVERCURRENT PROTECTION RELAYS
Core may not saturate for a current “I” less than “2xI
set
” to secure
operation.
The current output is calculated:
Both phase and earth-faults values should be checked when
earth fault currents are high. Normally however the short circuit
protection will give the highest requirement.
Overcurrent relays have moderate requirement on accuracy. 5P
or 10P class according can be used without problems. If a low ac-
curacy class is used this should be considered when selecting
the setting. Especially the margin should be increased for earth
faults when the summation of the three phases is done as the
measuring error is increased when several current transformer
cores are involved.
I
E
2
R
Loop
--------------=
IMPEDANCE AND DISTANCE PROTECTION RELAYS
266
BA THS / BU Transmission Systems and Substations
LEC Support Programme
3. IMPEDANCE AND DISTANCE PROTECTION
RELAYS
Distance protection relays
Distance protection is an instantaneous impedance measuring
protection for MV and HV power lines. The general requirement
on current transformer cores which can be used for ABB Dis-
tance protection relays, of modern static and numerical type, is
that the core may not saturate within 50 ms for a fault at the end
of zone 1. Differences of acceptable saturation time between dif-
ferent relay types exists but a use of 50 ms is generally suitable.
For detailed information about the requirement we refer to the
manual of each relay. Saturation is allowed for internal faults as
the relays are designed to operate with saturated CT core without
any delay in operation. Saturation due to the DC component must
be considered due to the instantaneous operation of the protec-
tion.
The empiric formula for a CT free from saturation is:
E
2
= I
s1
(X/R+l)(R
CT
+R
L
) where
“I
s1
” is the current through the own line for a fault at set reach of
zone 1 and
“I
s1
” is calculated as:
where
Z
s
is the total impedance for a fault at zone 1 reach.
X/R is the ratio of X/R up to the zone 1 reach.
R
CT
+R
L
give the secondary resistance of the current transformer
core and the connected burden to the current transformer termi-
nal.
To calculate the required output voltage for a saturated free volt-
age the following formula can be used. The secondary time con-
stant is then considered to be high and the influence neglected:
I
s1
U
3Z
s
×
-------------------=
E
2
I
s1
T
1
w1 e
0.05
T
1
------------
–
1+×
R
ct
R
1
+()=
DIFFERENTIAL PROTECTION RELAYS
CT Requirements
for worldwide cooperation
267
BA THS / BU Transmission Systems and Substations
LEC Support Programme
where
T
1
is the primary time constant.
4. DIFFERENTIAL PROTECTION RELAYS
There are many types of Differential protection relays used for
many different applications. Here follows a summary of the most
commonly used differential relays from ABB.
High impedance protection relays.
CT cores used together with high impedance protection must all
have identical turn ratio. T
urn correction is not allowed. Normally
separate cores must be provided for this kind of protection on all
involved current transformers. However sometimes high imped-
ance type of relays at Restricted earth fault protection application
can be used on the same core together with the Transformer dif-
ferential protection if interposing CT:s, or insulated input trans-
formers, are provided.
All cores must have a saturation voltage
U
sat
:
U
sat
>2U
r
to ensure operation at internal faults.
Relay operating voltage U
r
is calculated as:
U
r
> I
smax
(R
ct
+ R
Loop
) where
I
smax
” is the max secondary through fault current and
R
Loop
” is the max loop resistance seen from connection point.
Two-way cable resistance must normally be used but for applica-
tions as pure phase fault protection single way cable resistance
can be used.
Transformer differential protection.
Transformer differential protection relays are percentage restraint
differential protection relays. The operation level is increased at
through faults to ensure stability even with the tap changer in an
end position and with differences between high and low voltage
CT cores. Generally the CT cores should not saturate for any

DIFFERENTIAL PROTECTION RELAYS
268
BA THS / BU Transmission Systems and Substations
LEC Support Programme
through fault but the percentage stabilization and an internal sta-
bilization for current transformer saturation means that the re-
quirement can be limited.
Following formula should be used:
E2 ≥ K
TF
x I
smax
(R
ct
+ R
Loop
) where
K
TF
is the transient overdimensioning factor
I
smax
is the max secondary through fault current and
R
Loop
is the max loop resistance seen from connection point.
K
TF
should be selected dependent of the type of Protection relay
supplied and the application.
K
TF
= 2 should be used for RADSB with interposing CT’s.
K
TF
= 3 should be used for RADSB without interposing CT’s or
RET 521 DIfferential protection function.
K
TF
= 4 should be used for SPAD 346 or RET 316.
For one- and a half, Ring busbar or two breaker arrangements
separate stabilizing inputs shall always be used for CT's where
through fault currents can occur.
The modern relays are designed to operate correctly for heavy in-
ternal faults also with saturated CT's so the through fault condi-
tion to ensure that stability is achieved for outer faults will be
dimensioning for the involved cores. It is advisable to use as sim-
ilar saturation level (in current) for the involved current transform-
ers.
Accuracy class 5P according to IEC185, or similar accuracy
class in other standards, should preferable be used.
Pilot wire differential relay RADHL
RADHL operates with a circulating current in the pilot wires. Cur-
rent transformer cores must be provided with the same ratio at
the two terminals but don’t need to be of the same type. The CT
accuracy requirements are based on the most severe external
fault under symmetrical current conditions. Under these condi-
tions and with the CT burden composed of the CT secondary and
lead resistances, plus an allowance of 5 VA for the largest single

DIFFERENTIAL PROTECTION RELAYS
CT Requirements
for worldwide cooperation
269
BA THS / BU Transmission Systems and Substations
LEC Support Programme
phase burden of the RADHL summation CT, the CT shouldn’t ex-
ceed 10% accuracy
This gives an expression
where “
I
s
” is the maximum secondary AC fault current, “E
2
” is the
CT:s secondary voltage with 10P (or 5P) accuracy and
“E
z
” is the
voltage across the regulating diodes reflected to the primary side
of summation CT.
For 1A RADHL at ph-ef faults,
“E
z
” is 0.7 V and for 1A RADHL at
ph-ph faults
“U
z
” is 3.9 V
For 5A RADH, at ph-ph faults
“E
z
” is 0.15 V and for 5A RADHL at
ph-ef faults
“U
z
” is 0.78 V
“R
l
” is the cable resistance (one way for ph-ph and two way for
ph-ef faults),
“R
ct
” is the CT:s secondary winding resistance and
“R
sc
” is the summation CT resistance, reflected to the primary
side of the summation current transformer, 0.2 Ω.
When so selected no saturation due to DC component in asym-
metrical fault currents will cause maloperation. Neither will CT:s
that saturates during an internal fault, due to AC or DC, prevent
operation. General prudence suggests a limitation of the maxi-
mum fault currents to 100 times nominal current or 250 A sec-
ondary which ever is the smallest.
When current transformers of similar characteristic are provided
at both ends of the line the through faults will always saturate the
current transformers equal at both ends and smaller cores can
then be used.
The formula:
E2 ≥ 20 x I
n
(R
CT
+ R
l
+ R
2
+ 5/I
n2
)
I
s
E
2
E
z
–
R
I
R
ct
R
sct
++
--------------------------------------=
DIFFERENTIAL PROTECTION RELAYS
270
BA THS / BU Transmission Systems and Substations
LEC Support Programme
should then be fulfilled, where:
R
2
is the load of other equipment connected to the same core.
R
l
is cable resistance (one way for ph-ph and two way for ph-ef
faults. If earth fault current is low only one way is sufficient).
Busbar differential protection type RADSS or REB 103 and
pilot wire differential protection RADSL
RADSS/L and REB 103 are moderate impedance restraint pro-
tection relays which due to extreme speed and restraining char-
acteristic is independent of CT saturation for both internal and
external faults.
To secure operation at internal faults the CT secondary limiting
emf
“E
2
” or the CT knee-point voltage is:
where
“I
d1
” is the RADSS/L, REB103 operating current
“R
dt
” is the total differential circuit resistance
“28 Ω” is the secondary winding resistance of the aux CT in the
differential circuit, referred to the primary side and
“n
d
V
d3
= 20V” is the forward voltage drop at the full wave rectifier
in the aux CT at the differential circuit secondary side.
Loop resistance
The permissible loop resistance for secure through fault stability
seen from the relay is:
where
“S” is the setting of the slope
“R
dt
” is the total differential circuit resistance and
where
“n
d
” is the turns ratio of the aux CT in the differential circuit and is
10,
E
2
2U
rs
I
d1
R
dt
28+()n
d
V
d3
+=≥
R
Ix
R
dt
S1S–()⁄×=
R
dt
n
d
2
R
d3
× R
md
R
a
R
d11
×()++=