Power electronic handbook
Подождите немного. Документ загружается.

1028 B. Karanayil and M. F. Rahman
TDL
TDL
TDL
TDL
TDL
PI
LIM
+
−
−
+
−
+
+
+
+
−
w
r
*
(k)
i
s
dq*
(k)
i
ds
(k)
ANN
N
c
∆w
r
*
(k)
REF.
MODEL
∆w
r
d
(k)
1/Z
∆w
r
d
(k−1)
∆w
r
(k−1)
e
c
(k−1)
e
i
(k−1)
1/Z
w
e
(k)
CURRENT
CONTROLLED
INDUCTION
MOTOR
ANN
N
i
∆w
r
(k)
dw
e
(k)
∆w
r
(k−1)
ˆ
w
r
(k)
1/Z
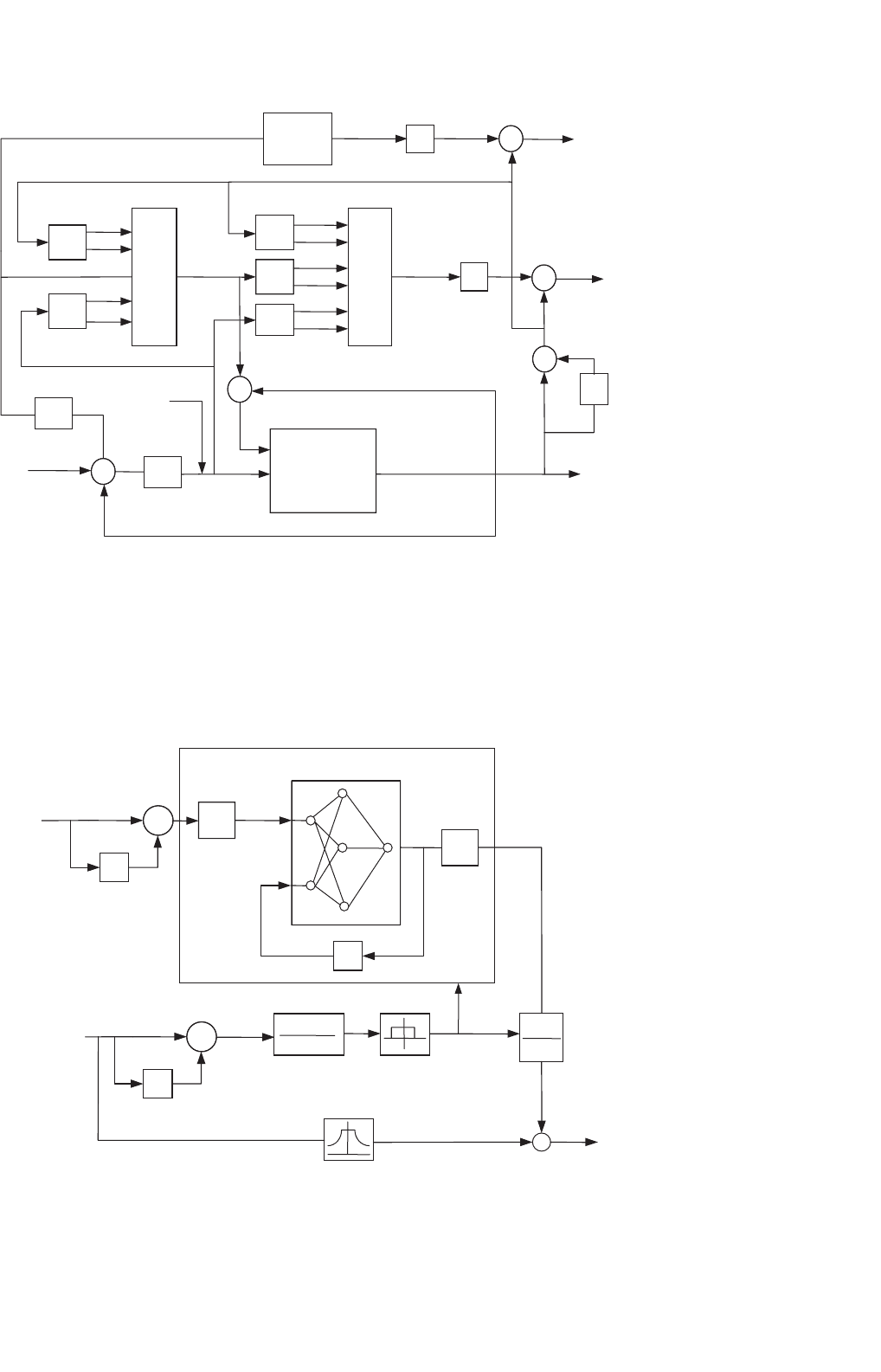
FIGURE 36.28 Adaptive speed control of the induction motor using ANN.
IS
ANN
+
_
OS
+
_
Flux weakening
Zero
detector
Moving
Average
Filter
Reset
Integrator
Input scaling
Enable /
Reset
ANN Efficiency Optimization System
Output
scaling
∆P
dc
(k)
Z
−1
P
dc
(k)
∆c(k−1)
∆c (k )
∆C(k )
(z−1)
1
C(k )
Excitation
flux
C(k )′
C(k )
0
Z
−1
Z
−1
∆w
m
(k)
z
2
+ z + 1
3z
−1
w
m
(k)
FIGURE 36.29 Induction motor efficiency optimizer using ANN.
36 ANN Applications in Power Electronics and Electrical Drives 1029
36.4.3 Efficiency Optimization in Electric Drives
The efficiency improvement of induction motor drives via
flux control can be classified into three groups: pre-computed
flux programs, real-time computation of losses, and on-line
input–output efficiency optimization control. All of these
methods target choosing a value of the motor excitation that
optimizes the motor-converter losses. The main requirement
of an input–output optimization is to achieve the flux opti-
mization in a minimum number of search steps. A constant
search step may take too long if the step is too small, or it
may bypass the minimum power input if the step is too large.
For each mechanical operating point of the motor, it is pos-
sible to find a combination of rotor flux linkage and torque
producing current i
q
at which the dc link power P
dc
to the
drive system is minimum.
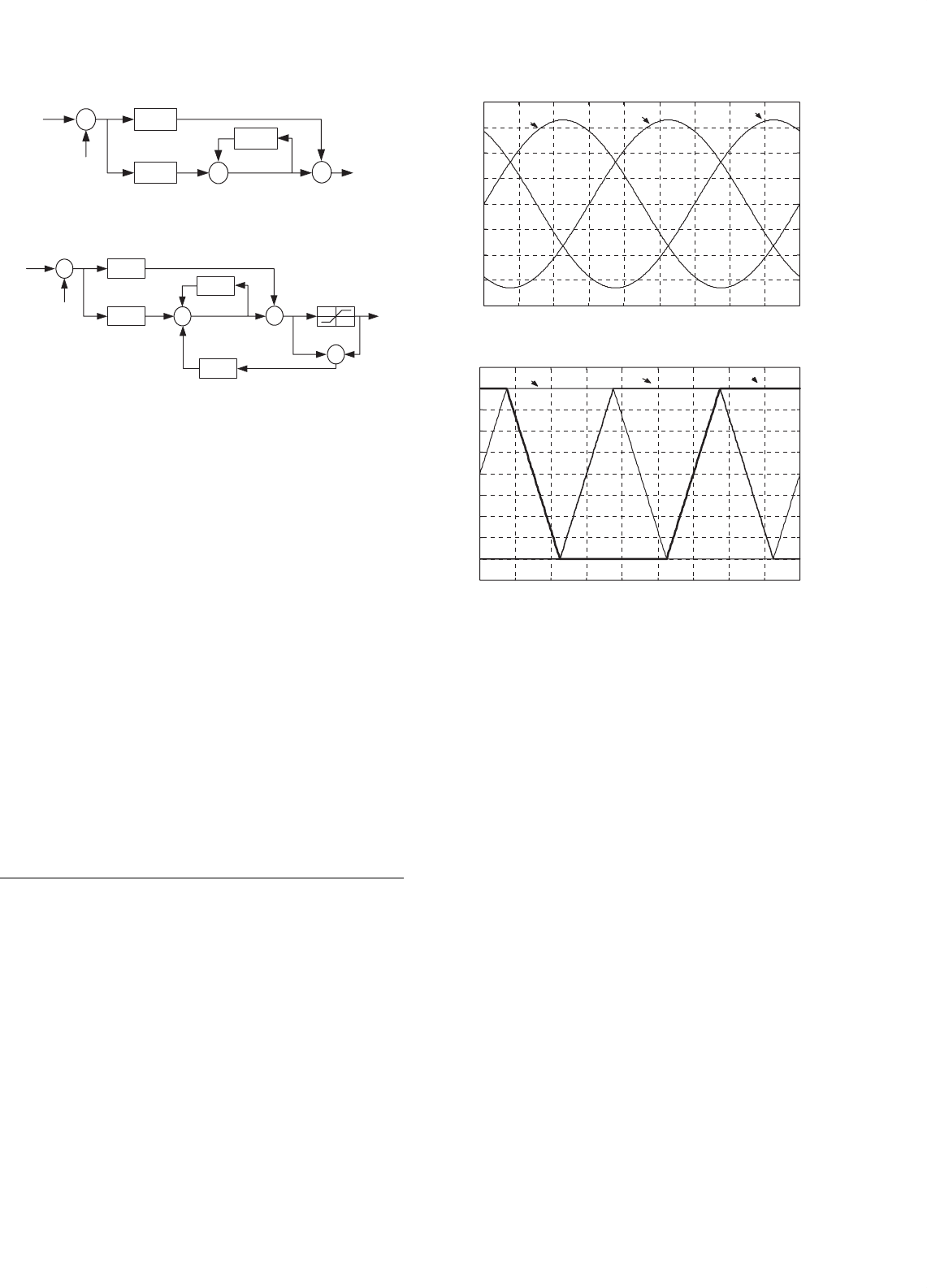
One of the possible ANN efficiency optimizer reported
is shown in Fig. 36.29. An ANN-based search algorithm is
employed to operate as an efficiency optimizer. The inputs to
the system are the dc power fed into the drive system at instant
k, and the change in the control variable at the previous instant
c(k−1). The only output is the actual change in control vari-
able c(k). Appropriate scaling from engineering units to the
normalized interval [−1, 1] are implemented by the input and
output interfaces, input scaling (IS) and output scaling (OS).
The speed signal is used to generate the reference flux C(k)
0
corresponding to each speed. The mechanical steady-state is
detected by applying a moving average filtering to the speed
S
A
S
B
S
C
Denormalization
Normalization
UP/DOWN
COUNTER
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
Angle
subnet
Amplitude
subnet
V *
W
1
1,1
W
1
20,1
W
2
1,1
f (V *)
WT
s/2
W
2
4,20
g
A
(a*)
g
B
(a*)
g
C
(a*)
+WT
s/4
WT
A–ON
= f (V
*
)* g(a *)+WT
s/4
WT
A-ON
WT
B-ON
WT
C-ON
q
e
*
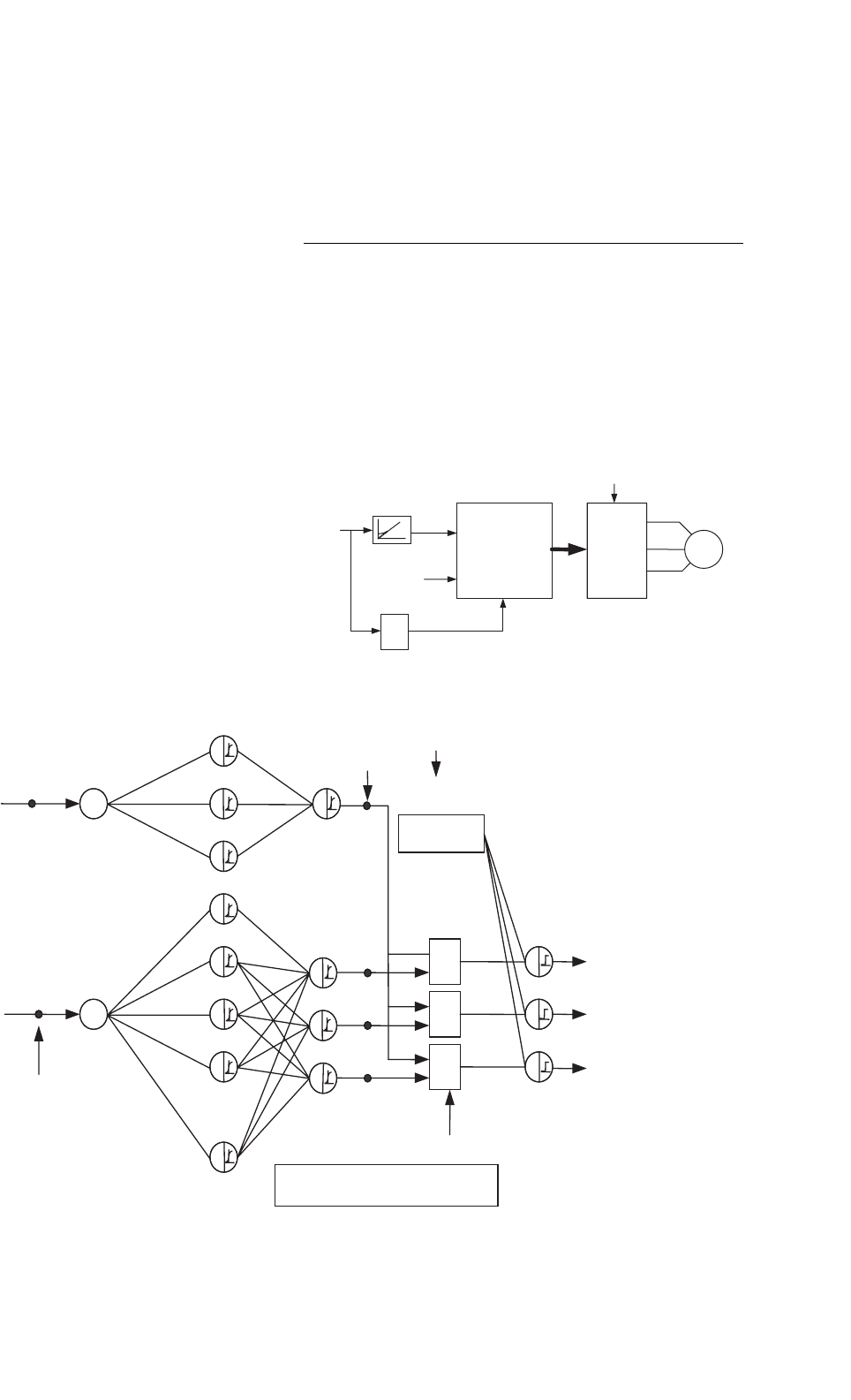
FIGURE 36.31 Neural network topology (2 × 20 × 4) for PWM wave synthesis.
variation ω
m
. The ANN efficiency optimizer is enabled only
during the mechanical steady-state.
36.5 ANN-based Controls in Power
Converters
A feedforward ANN can implement a non-linear input–output
mapping. A feedforward carrier-based pulse-width modu-
lation (PWM) technique, such as space vector modulator
(SVM), can be looked at as a non-linear mapping where the
command phase voltages are sampled at the input and the cor-
responding pulse-width patterns are established at the output.
Figure 36.30 shows the block diagram of an open-loop V/f-
controlled induction motor drive incorporating the proposed
Space Vector
PWM
(ANN based)
∫
PWM
Inverter
Induction
Motor
V
ds
*
= 0
V
qs
*
=V
*
w
e
*
q
e
*
V
DC
FIGURE 36.30 V/f control of induction motor using ANN-based SVM.

1030 B. Karanayil and M. F. Rahman
ANN-based SVM controller. The command voltage V
∗
qs
(=V
∗
)
is generated from the frequency or speed command, and the
angle command θ
∗
e
is obtained by integrating the frequency,
as shown. The output of the modulator generates the PWM
patterns for the inverter switches.
The ANN can be conveniently trained off-line with the data
generated by calculation of the SVM algorithm. The ANN has
inherent learning capability that can give improved precision
by interpolation unlike the standard lookup table method.
Figure 36.31 shows such an SVM that can operate during
both undermodulation and overmodulation regions linearly
extending smoothly up to a square wave. The SVM is imple-
mented using two subnets: angle subnet and amplitude subnet.
The subnets use a multiplayer perceptron-type network with
sigmoidal-type transfer function. The bias is not shown in the
figure. The composite network uses two neurons at the input,
20 neurons in the hidden layer, and four output neurons.
The input signal to the angle subnet is θ
e
angle which is nor-
malized and then pulse-width functions at unit amplitude are
solved (or mapped) at the output for three phases, as indi-
cated. The amplitude subnet implements the f (V
∗
) function.
The digital words corresponding to the turn-on time are gen-
erated by multiplying the angle subnet output with that of
the amplitude subnet and then adding the T
s
/4 bias signal,
as shown. The PWM signals are then generated using a sin-
gle timer. The angle subnet is trained with an angle interval
of 2.16
◦
in the range of 0–360
◦
. Due to learning or interpo-
lation capability, both the subnets will operate higher signal
resolution. A sampling interval T
s
of 50 µs corresponds to a
switching frequency of 20 kHz and a 100 µs that corresponds
to 10 kHz.
Further Reading
1. P. Vas, Artificial Intelligence-Based Electrical Machines and Drives: appli-
cation of fuzzy, neural, fuzzy-neural and genetic-algorithm – based
techniques, Oxford University Press, New York, 1999.
2. B.K. Bose, Modern Power Electronics and AC Drives, Prentice Hall,
New Jersey, 2002.
3. L. Ben-Brahim, S. Tadakuma, and A. Akdag, “Speed control of induc-
tion motor without rotational transducers,” IEEE Transactions on
Industry Applications, vol.35, no.4, pp. 844–850, July/August 1999.
4. M.G. Simoes and B.K. Bose, “Neural network based estimator of feed-
back signals for a vector controlled induction motor drive,” IEEE
Transactions on Industry Applications, vol.31, pp. 620–629, May/June
1995.
5. K. Funahashi, “On the approximate realization of continuous map-
pings by neural networks,” Neural Networks, vol.2, pp. 183–192,
1989.
6. D.T. Pham and X. Liu, Neural Networks for Identification, Prediction
and Control, Springer–Verlag, New York, 1995.
7. M. Wishart and R.G. Harley, “Identification and control of induc-
tion machines using artificial neural networks,” IEEE Transaction on
Industry Applications, vol.31, no.3, pp. 612–619, May/June 1995.
8. K.S. Narendra and K. Parthasarathy, “Identification and control of
dynamical systems using neural networks,” IEEE Transactions on
Neural Networks, vol.1, no.1, pp. 4–27, March 1990.
9. J.O. Pinto, B.K. Bose, L.E.B. De Silva, and M.P. Kazmierkowski,
“A Neural-Network based Space-Vector PWM Controller for
Voltage-fed Inverter induction motor drive,” IEEE Transactions
on Industry Applications, vol.36, no.6, pp. 1628–1636, November/
December 2000.

37
DSP-based Control of Variable
Speed Drives
Hamid A. Toliyat, Ph.D.
Electrical and Computer
Engineering Department, Texas
A&M University, 3128 Tamus,
216g Zachry Engineering Center,
College Station, Texas, USA
Mehdi Abolhassani, Ph.D.
Black & Decker (US) Inc., 701 E
Joppa Rd., TW100, Towson,
Maryland, USA
Peyman Niazi, Ph.D.
Maxtor Co., 333 South St.,
Shrewsbury, Massachusetts, USA
Lei Hao, Ph.D.
Wavecrest Laboratories, 1613 Star
Batt Drive, Rochester Hills,
Michigam, USA
37.1 Introduction ........................................................................................ 1031
37.2 Variable Speed Control of AC Machines ................................................... 1032
37.3 General Structure of a Three-phase AC Motor Controller ............................ 1032
37.3.1 Pulse Width Modulation Generation • 37.3.2 Analog-to-Digital Conversion Requirements
• 37.3.3 Position Sensing and Encoder Interface Units • 37.3.4 The PI regulator
37.4 DSP-based Control of Permanent Magnet Brushless DC Machines ................ 1037
37.4.1 Mathematical Model of the BLDC Motor • 37.4.2 Torque Generation • 37.4.3 BLDC
Motor Control Topology • 37.4.4 DSP Controller Requirements • 37.4.5 Implementation of
the BLDC Motor Control Algorithm Using LF2407
37.5 DSP-based Control of Permanent Magnet Synchronous Machines................. 1041
37.5.1 Mathematical Model of PMSM • 37.5.2 Mathematical Model of PMSM in Rotor
Reference Frame • 37.5.3 PMSM Control Topology • 37.5.4 DSP Controller Requirements
• 37.5.5 Implementation of the PMSM Algorithm Using the LF2407
37.6 DSP-based Vector Control of Induction Motors......................................... 1046
37.6.1 Induction Motor Field-oriented Control • 37.6.2 DSP Controller Requirements
• 37.6.3 Implementation of Field-oriented Speed Control of Induction Motor
37.1 Introduction
High-performance motor drives are characterized by the need
for smooth rotation down to stall, full control of torque at
stall, and fast accelerations and decelerations. In the past,
variable speed drives employed predominantly dc motors
because of their excellent controllability. However, modern
high-performance motor drive systems are usually based on
three-phase ac motors, such as the ac induction motor (ACIM)
or the permanent magnet synchronous motor (PMSM). These
machines have supplanted the dc motor as the machine of
choice for variety of applications because of their simple robust
construction, low inertia, high power density, high torque
density, and good performance at high speeds of rotation.
The vector-control techniques established for controlling
these ac motors; and most modern high-performance drives
now implement digital closed-loop current control. In such
systems, the achievable closed-loop bandwidths are directly
related to the rate at which the computationally intensive
vector-control algorithms and associated vector rotations can
be implemented in real time. Because of this computational
burden, many high-performance drives now use digital signal
processors (DSPs) to implement the embedded motor- and
vector-control schemes. The DSPs are special microprocessors
used where real-time manipulation of large amounts of digital
data is required in order to implement complicated control
algorithms. The inherent computational power of the DSP
permits very fast cycle times and closed-loop current control
bandwidths to be achieved.
The complete current control scheme for these machines
also requires a high-precision pulse-width modulation (PWM)
voltage-generation scheme and high-resolution analog-to-
digital (A/D) conversion (ADC) for measurement of the
motor currents. In order to maintain a smooth control of
torque to zero speed, rotor position feedback is essential for
modern vector controllers. Therefore, many systems include
rotor-position transducers, such as resolvers and incremental
encoders.
The Texas Instruments TMS320LF2407 DSP Controller
(referred to as the LF2407 in this chapter) is a programmable
digital controller with a C2xx DSP central processing unit
(CPU) as the core processor. The LF2407 contains the DSP
Copyright © 2007, 2001, Elsevier Inc.
All rights reserved.
1031

1032 H. A. Toliyat et al.
core processor and useful peripherals integrated onto a sin-
gle piece of silicon. The LF2407 combines the powerful CPU
with on-chip memory and peripherals. With the DSP core
and control-oriented peripherals integrated into a single chip,
users can design very compact and cost-effective digital control
systems.
The LF2407 DSP controller offers 40 million instructions
per second (MIPS) performance. This high processing speed
of the C2xx CPU allows users to compute parameters in real
time rather than look up approximations from tables stored
in memory. This fast performance is well suited for process-
ing control parameters in applications such as notch filters or
sensorless motor control algorithms where a large amount of
calculations must be computed quickly.
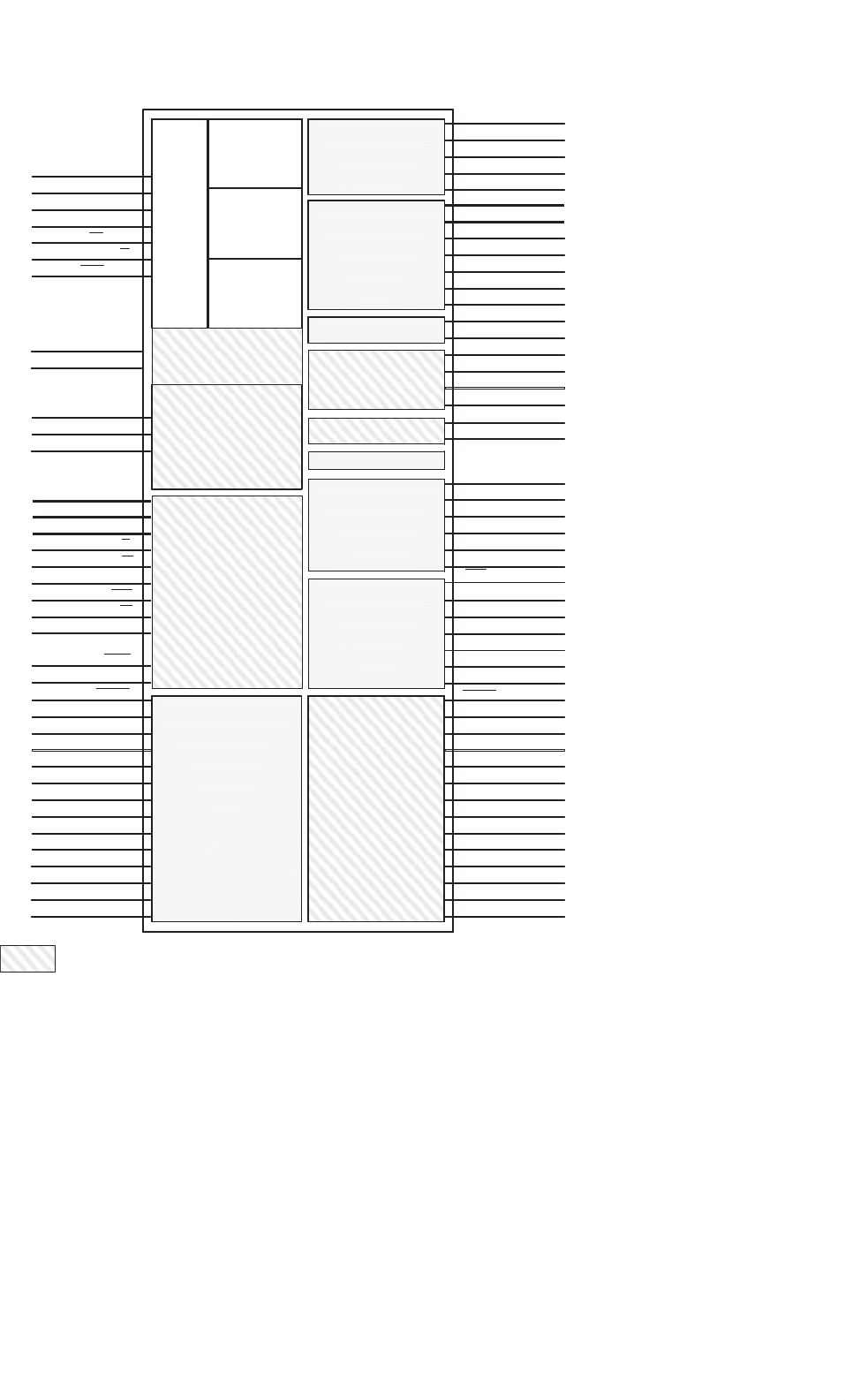
While the “brain” of the LF2407 DSP is the C2xx core,
the LF2407 contains several control-orientated peripherals
onboard (see Fig. 37.1). The peripherals on the LF2407 make
virtually any digital control requirement possible. Their appli-
cations range from analog to digital conversion to pulse width
modulation (PWM) generation. Communication peripherals
make possible the communication with external peripher-
als, personal computers, or other DSP processors. Below is
a graphical listing of the different peripherals onboard the
LF2407 depicted in Fig. 37.1.
We describe here the fundamental principles behind the
implementation of high-performance controllers for three-
phase ac motors – combining an integrated DSP controller,
LF2407, flexible PWM generation, high-resolution A/D con-
version, and an embedded encoder interface.
37.2 Variable Speed Control of AC
Machines
Efficient variable speed control of three-phase ac machines
requires the generation of a balanced three-phase set of vari-
able voltages with variable frequency. The variable-frequency
supply is typically produced by conversion from dc using
power-semiconductor devices (typically MOSFETs or IGBTs)
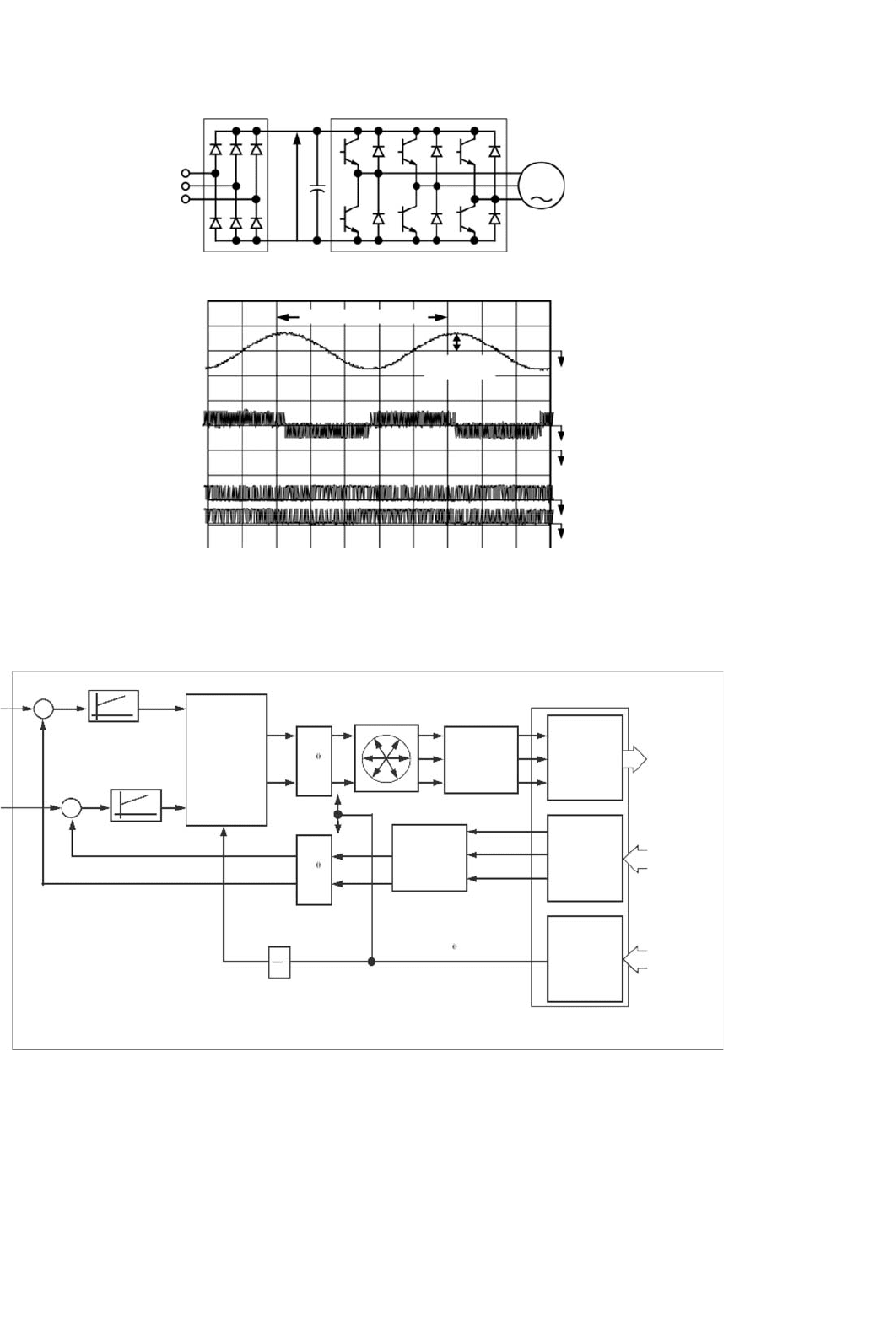
as solid-state switches. A commonly used converter configu-
ration is shown in Fig. 37.2a. It is a two-stage circuit, in which
the fixed-frequency 50 or 60 Hz ac supply is first rectified to
provide the dc link voltage, V
d
, stored in the dc link capacitor.
This voltage is then supplied to an inverter circuit that gener-
ates the variable-frequency ac power for the motor. The power
switches in the inverter circuit permit the motor terminals to
be connected to either V
d
or ground.
This mode of operation gives high efficiency because, ideally,
the switch has zero loss in both the open and closed positions.
By rapid sequential opening and closing of the six switches
(Fig. 37.2a), a three-phase ac voltage with an average sinusoidal
waveform can be synthesized at the output terminals. The
actual output voltage waveform is a pulse-width modulated
(PWM) high-frequency waveform, as shown in Fig. 37.2b. In
practical inverter circuits using solid-state switches, high-speed
switching of about 20 kHz is possible. Therefore sophisticated
PWM waveforms with fundamental frequencies, nominally
in the range of 0–250 Hz can be generated. The inductive
reactance of the motor increases with frequency. Thus, higher-
order harmonic currents are very small and near-sinusoidal
currents flow in the stator windings. The fundamental voltage
and output frequency of the inverter, as indicated in Fig. 37.2b,
are adjusted by changing the PWM waveform using an appro-
priate controller. When controlling the fundamental output
voltage, the PWM process inevitably modifies the harmonic
content of the output voltage waveform. A proper choice of
modulation strategy can minimize these harmonic voltages
and in result, harmonic losses in the motor.
37.3 General Structure of a Three-phase
AC Motor Controller
Accurate control of any motor-drive process may ultimately
be reduced to the problem of accurate control of both the
torque and speed of the motor. In general, motor speed is
controlled directly by measuring the motor’s speed or posi-
tion using appropriate transducers, and torque is controlled
indirectly by suitable control of the motor-phase currents.
Figure 37.3 shows a block diagram of a typical synchronous
frame current controller for a three-phase motor. The figure
also shows the proportioning of tasks between software code
modules and the dedicated motor-control peripherals of a
motor controller such as the LF2407. The controller consists of
two proportional-plus-integral-plus-differential (PID) current
regulators that are used to control the motor current vec-
tor in a reference frame that rotates synchronously with the
measured rotor position.
Sometimes it may be desirable to implement a decoupling
between voltage and speed that removes the speed dependen-
cies and associated axes cross coupling from the control loop.
The reference voltage components are then synthesized on the
inverter using a suitable PWM strategy, such as space vector
modulation (SVM). It is also possible to incorporate some
compensation schemes to overcome the distorting effects of
the inverter switching dead time, finite inverter device on-
state voltages, and dc-link voltage ripple. The two components
of the stator current vector are known as the direct-axis and
quadrature-axis components. The direct-axis current controls
the motor flux and is usually controlled to be zero with
permanent magnet machines. The motor torque may then
be controlled directly by regulation of the quadrature-axis
component. Fast, accurate torque control is essential for high-
performance drives in order to ensure rapid acceleration and
deceleration – and smooth rotation down to zero speed under
all load conditions.
37 DSP-based Control of Variable Speed Drives 1033
XTAL1/CLKIN
XTAL2
PLLV
CCA
PLLF2
PLLF
V
SSA
V
REFHI
ADCIN08-ADCIN15
V
CCA
ADCIN00-ADCIN07
SCIRXD/IOPA1
SPISIMO/IOPC2
XINT2/ADCSOC/IOPD0
SCITXD/IOPA0
V
REFLO
Port A(0-7) IOPA[0:7]
SPICLK/IOPC4
SPISTE/IOPC5
SPISOMI/IOPC3
Port E(0-7) IOPE[0:7]
Port F(0-6) IOPF[0:6]
Port C(0-7) IOPC[0:7]
Port D(0)IOPD[0]
Port B(0-7) IOPB[0:7]
TDO
TDI
CANRX/IOPC7
TRST
CANTX/IOPC6
EMU1
PDPINTB
TCK
EMU0
TMS
CAP5/QEP4/IOPF0
CAP4/QEP3/IOPE7
PWM7/IOPE1
PWM8/IOPE2
CAP6/IOPF1
PWM10/IOPE4
PWM9/IOPE3
PWM11/IOPE5
PWM12/IOPE6
T4PWM/T4CMP/IOPF3
T3PWM/T3CMP/IOPF2
TDIRB/IOPF4
TCLKINB/IOPF5
DARAM (B0)
256 Words
DARAM (B1)
256 Words
DARAM (B2)
32 Words
C2xx
DSP
core
PLL clock
10-Bit ADC
(with twin
autosequencer)
RS
CLKOUT/IOPE0
XINT1/IOPA2
BIO/IOPC1
MP/MC
W/R / IOPC0
TMS2
A0-A15
D0-D15
TP1
TP2
BOOT EN/XF
READY
STRB
R/W
RD
PS, DS, IS
VIS OE
ENA 144
WE
CAP3/IOPA5
PWM1/IOPA6
CAP1/QEP1/IOPA3
CAP2/QEP2/IOPA4
PDPINTA
PWM5/IOPB2
PWM6/IOPB3
PWM3/IOPB0
PWM4/IOPB1
PWM2/IOPA7
T2PWM/T2CMP/IOPB5
T1PWM/T1CMP/IOPB4
TCLKINA/IOPB7
TDIRA/IOPB6
V
DD
(3.3V)
V
SS
V
CCP
(5V)
SARAM (2K Words)
Flash/ROM
(32K Words
:4K/12K/12K/4K)
External memory interface
SCI
SPI
WD
Digital I/O
(shared with other pins)
CAN
JTAG port
Indicates optional modules in the 240x family. The memory size and peripheral selection
of these modules change for different 240xA devices
Event manager B
- 3 Capture Inputs
- 6 Compare/PWM Outputs
- 2 GP Timers/PWM
Event manager A
- 3 Capture Inputs
- 6 Compare/PWM Outputs
- 2 GP Timers/PWM
FIGURE 37.1 Graphical overview of DSP core and peripherals on the LF2407. (Courtesy of Texas Instruments)
The actual direct and quadrature current components are
obtained by first measuring the motor phase currents with
suitable current-sensing transducers and converting them to
digital, using an on-chip ADC system. It is usually sufficient
to simultaneously sample just two of the motor line cur-
rents: since the sum of the three currents is zero, the third
current can, when necessary, be deduced from simultane-
ous measurements of the other two currents The controller
software makes use of mathematical vector transformations,
known as Park Transformations that ensure that the three-
phase set of currents applied to the motor is synchronized
to the actual rotation of the motor shaft, under all oper-
ating conditions. This synchronism ensures that the motor
always produces the optimal torque per ampere – i.e. operates
at optimal efficiency. The vector rotations require real-time
calculation of the sine and cosine of the measured rotor
1034 H. A. Toliyat et al.
(b)
(a)
FUNDAMENTAL
MOTOR
PHASE
VOLTAGE
RECTIFIER
INVERTER
THREE-
PHASE
60Hz
MAINS
DESIRED FREQUENCY
DESIRED
AMPLITUDE
B
N
A
M
C
V
AB
V
D
V
AN
V
BN
FIGURE 37.2 (a) Typical configuration of power converter used to drive three-phase ac motors and (b) typical PWM waveforms in the generation
of a variable-voltage, variable-frequency supply for the motor.
VOLTAGE
DECOUPLING
PARK
SVM
NON-
IDEALITY
CORRECTION
ADC
SYSTEM
ENCODER
FEEDBACK
SIGNALS
ENCODER
INTERFACE
UNIT
FWM
GENERATION
UNIT
MOTOR
CURRENT
FEEDBACK
PWM
OUTPUTS
MOTOR CONTROL
PERIPHERALS
DSP SOFTWARE
PID
PID
PARK
3−>2
TRANSFORM
ROTOR
POSITION
d
dt
I*
DS
I*
QS
+
+
−
−
e
−j
e
e
−j
e
e
FIGURE 37.3 Configuration of typical control system for three-phase ac motor.
37 DSP-based Control of Variable Speed Drives 1035
angle, plus a number of multiply-and-accumulate operations.
The overall control-loop bandwidth depends on the speed
of implementation of the closed-loop control calculations –
and the resulting computation of new duty-cycle values. The
inherent fast computational capability of the 40-MIPS, 16-bit
fixed-point DSP core makes it the ideal computational engine
for these embedded motor-control applications.
37.3.1 Pulse Width Modulation Generation
In typical ac motor-controller design, both hardware and soft-
ware considerations are involved in the process of generating
the PWM signals that are ultimately used to turn on or off
the power devices in the three-phase inverter. In typical digi-
tal control environments, the controller generates a regularly
timed interrupt at the PWM switching frequency (nominally
10–20 kHz). In the interrupt service routine, the controller
software computes new duty-cycle values for the PWM signals
used to drive each of the three legs of the inverter. The com-
puted duty cycles depend on both the measured state of the
motor (torque and speed) and the desired operating state. The
duty cycles are adjusted on a cycle-by-cycle basis in order to
make the actual operating state of the motor follow the desired
trajectory.
Once the desired duty cycle values have been computed by
the processor, a dedicated hardware PWM generator is needed
to ensure that the PWM signals are produced over the next
PWM and controller cycle. The PWM generation unit typically
consists of an appropriate number of timers and comparators
that are capable of producing very accurately timed signals.
Typically, 10-to-12 bit performance in the generation of the
PWM timing waveforms is desirable.
Figure 37.4 shows a typical PWM waveform for a single leg
inverter. In general, there is a small delay required between
turning off one power device like A-phase lower device and
turning on the complementary power device A-phase upper
device. This dead-time is required to ensure the device being
turned off has sufficient time to regain its blocking capability
before the other device is turned on. Otherwise a short circuit
of the dc voltage could result.
CONTROL PERIOD CONTROL PERIOD CONTROL PERIOD
20015010050
CONTROLLER
INTERRUPTS
DUTY CYCLE, D1 DUTY CYCLE, D2 DUTY CYCLE, D3
AH
AL
NN + 1N + 2
TIME
µs
FIGURE 37.4 Typical PWM waveforms for a single inverter leg.
In LF2407, the compare units have been used to generate the
PWM signals. The PWM output signal is high when the output
of current PI regulation matches the value of T1CNT and is
set to low when the timer underflow occurs. The switch-states
are controlled by the ACTR register. In order to minimize the
switching losses, the lower switches are always kept on and
the upper switches are chopped on/off to regulate the phase
current.
37.3.2 Analog-to-Digital Conversion
Requirements
For control of high-performance motor drives, fast, high-
accuracy, simultaneous-sampling A/D conversion of the mea-
sured current values is required. The drives have a rated
operation range – a certain power level that they can sus-
tain continuously, with an acceptable temperature rise in the
motor and power converter. They also have a peak rating – the
ability to handle a current far in excess of the rated current for
short periods of time. This allows a large torque to be applied
transiently, to accelerate or decelerate the drive very quickly,
and then to revert to the continuous range for normal oper-
ation. This also means that in the normal operating mode of
the drive, only a small percentage of the total input range is
being used.
At the other end of the scale, in order to achieve the smooth
and accurate rotations desired in these machines, it is wise to
compensate for small offsets and non-linearities such as core
saturation and parameter detuning. In any current-sensor elec-
tronics, the analog signal processing is often subject to gain
and offset errors. Gain mismatches, for example, can exist
between the current-measuring systems for different wind-
ings. These effects combine to produce undesirable oscillations
in the torque. To meet both of these conflicting resolution
requirements, modern motor-drives use 10-bit A/D convert-
ers, depending on the cost/performance trade-off required by
the application.
The bandwidth of the system is essentially limited by the
amount of time it takes to input information and then per-
form the calculations. The A/D converters that take many

1036 H. A. Toliyat et al.
microseconds to convert can produce intolerable delays in
the system. A delay in a closed-loop system will degrade the
achievable bandwidth of the system, and bandwidth is one of
the most important figures of merit in these high-performance
drives. Therefore, fast analog-to-digital conversion is a neces-
sity for these applications.
A third important characteristic of the A/D converter used
in these applications is timing. In addition to high resolu-
tion and fast conversion, simultaneous sampling is needed. In
any three-phase motor, it is necessary to measure the currents
in the three windings of the motor at exactly the same time
in order to get an instantaneous “snapshot” of the torque in
the machine. Any time skew (time delay between the mea-
surements of the different currents) is an error factor that is
artificially inserted by the means of measurement. Such a non-
ideality translates directly into a ripple of the torque – a very
undesirable characteristic.
The analog-to-digital converter (ADC) on the LF2407 allows
the DSP to sample analog or “real-world” voltage signals. The
output of the ADC is an integer number which represents the
voltage level sampled. The integer number may be used for
calculations in an algorithm. The resolution of the ADC is
10 bits, meaning that the ADC will generate a 10-bit number
for every conversion it performs. However, the ADC stores the
conversion results in registers that are 16-bit wide. The 10 most
significant bits are the ADC result, while the least significant
bits (LSBs) are filled with “0”s. There are a total of 16 input
channels to the single input ADC. The control logic of the ADC
consists of auto-sequencers, which control the sampling of the
16 input channels to the ADC. The auto-sequencers not only
control which channels (input channels) will be sampled by
the ADC, but also the order of the channels that the ADC per-
forms conversions on. The two 8-conversion auto-sequencers
can operate independently or cascade together as a “virtual”
16-conversion ADC.
37.3.3 Position Sensing and Encoder Interface
Units
Usually the motor position is measured through the use of an
encoder mounted on the rotor shaft. The incremental encoder
produces a pair of quadrature outputs (A and B), each with a
large number of pulses per revolution of the motor shaft. For
a typical encoder with 1024 lines, both signals produce 1024
pulses per revolution. Using a dedicated quadrature counter,
it is possible to count both the rising and falling edges of both
the A and B signals so that one revolution of the rotor shaft
may be divided into 4096 different values. In other words,
a 1024 line encoder allows the measurement of rotor posi-
tion to 12-bit resolution. The direction of rotation may also
be inferred from the relative phasing of quadrature signals
A and B.
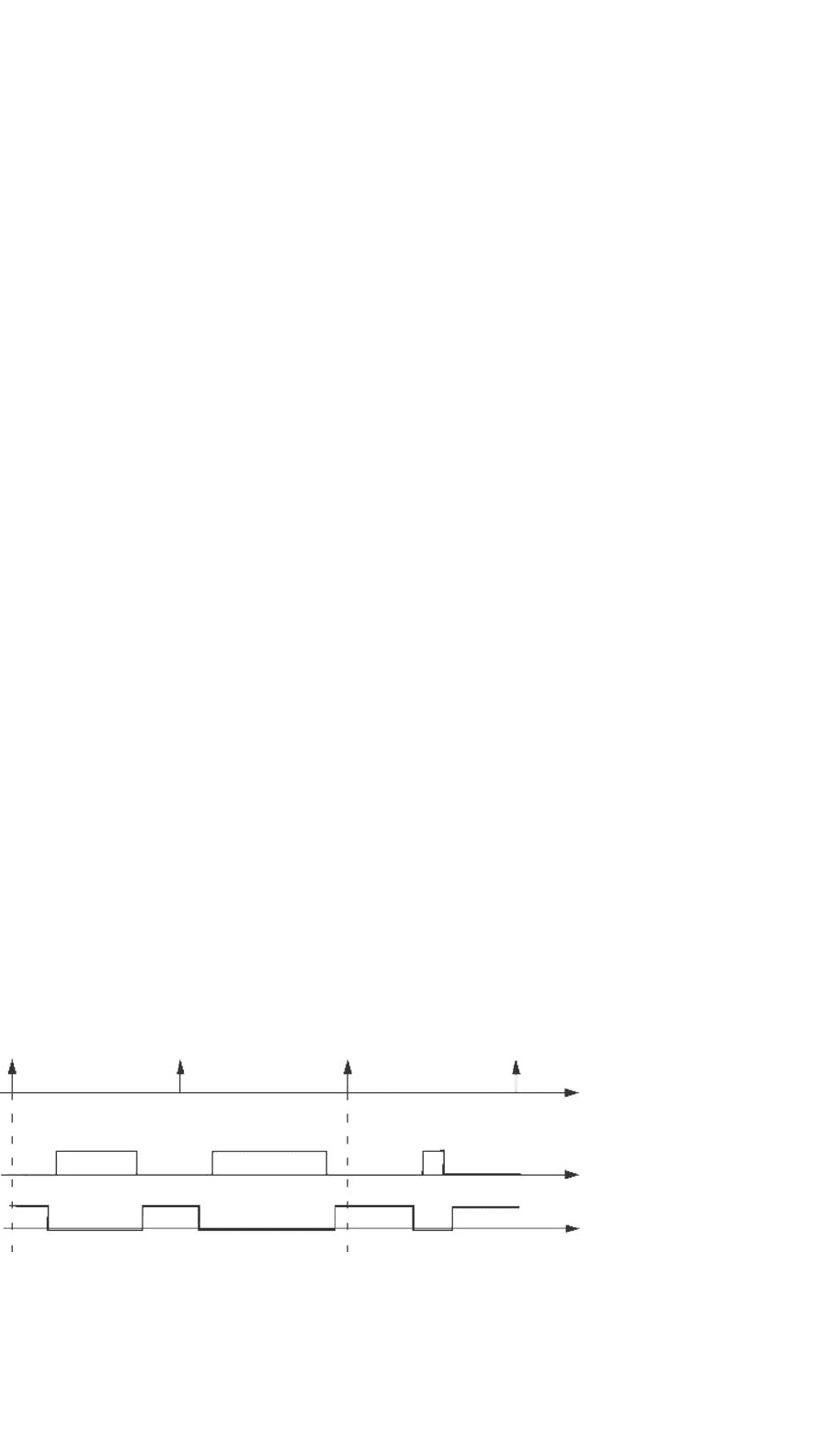
Figure 37.5 shows the structure of an optical encoder. It con-
sists of a light source, a radially slotted disk, and photoelectric
A
B
Light
Sensors
(a)
(b)
w
FIGURE 37.5 The structure of an encoder.
sensors. The disk rotates with the rotor. The two photosensors
detect the light passing through the slots in the disk. When
the light is hidden, a logic “0” is generated by the sensors.
When the light passes through the slots of the disk, a logic
“1” is produced. These logic signals are shown in Fig. 37.5. By
counting the number of pulses, the motor speed can be calcu-
lated. The direction of rotation can be determined by detecting
the leading signal between signals A and B.
This is all very well, but there is an increasing class of cost-
sensitive motor drive applications with lower performance
demands that can afford neither the cost nor the space require-
ments of the rotor position transducer. In these cases, the same
motor-control algorithms can be implemented with estimated
rather than measured rotor position.
The DSP core is quite capable of computing rotor posi-
tion using sophisticated rotor-position estimation algorithms,
such as extended Kalman estimators that extract estimates of
the rotor position from measurements of the motor voltages
and currents. These estimators rely on the real-time compu-
tation of a sufficiently accurate model of the motor in the
DSP. In general, these sensorless algorithms can be made to
work as well as the sensored algorithms at medium to high-
speeds of rotation. But as the speed of the motor decreases,
the extraction of reliable speed-dependent information from
voltage and current measurements becomes more difficult.
In general, sensorless motor control is applicable princi-
pally to applications such as compressors, fans and pumps,
where continuous operation at zero or low speeds is not
required.
37.3.4 The PI regulator
An electrical drive based on the field-orientated control (FOC)
needs two constants as control parameters: the torque com-
ponent reference i
e∗
qs
and the flux component reference i
e∗
ds
.
The classical PI regulator is well suited to regulate the torque
and flux feedback to the desired values. This is because it is
able to reach constant references by correctly setting both the
proportional term (K
p
) and the integral term (K
i
), which are,
respectively, responsible for the error sensibility and for the
steady-state error. The numerical expression of the PI regulator
37 DSP-based Control of Variable Speed Drives 1037
Kp
Ki
1/Z
U
ref
U
fbk
e
k
x
i
Y
k
Σ
Σ
Σ
FIGURE 37.6 Classical PI regulator structure in discrete domain.
Kp
Ki
1/Z
U
ref
U
fbk
e
k
x
i
Y
k
Y
1k
Kc
–
+
S
S
S
S
FIGURE 37.7 Numerical PI regulator with correction.
is as follows:
Y
(k)
= K
p
e
(k)
+K
i
e
(k)
+
k−1
n=0
e
(n)
(37.1)
which is represented in Fig. 37.6.
During normal operation, large reference value variations
or disturbances may occur, that result in the saturation and
overflow of the regulator variables and output. To solve this
problem, one solution is to add a correction of the integral
component as depicted in Fig. 37.7.
The constants K
p
, K
i
, K
c
, proportional, integral, and integral
correction components, are selected based on the sampling
period and on the motor parameters. After defining the DSP-
controlled motor drives requirements, in the following, we
describe the digital control algorithms for permanent magnet
motors and induction motors.
37.4 DSP-based Control of Permanent
Magnet Brushless DC Machines
Permanent magnet alternating current (PMAC) motors are
synchronous motors that have permanent magnets mounted
on the rotor and poly-phase, usually three-phase, armature
windings located on the stator. Since the field is provided by
the permanent magnets, the PMAC motor has higher efficiency
than induction or switched reluctance motors. The advantages
of PMAC motors, combined with a rapidly decreasing cost
of permanent magnets, have led to their widespread use in
many variable speed drives such as robotic actuators, com-
puter disk drives, appliances, automotive applications, and air
conditioning (HVAC) equipment.
In general, PMAC motors are categorized into two types.
The first type of motor is referred to as PM synchronous
0 20 40 60 80 100 120 140 160 180
−40
−30
−20
−10
0
10
20
30
40
Rotor Position (deg)
Back-EMF (V)
A B C
(a)
0 20 40 60 80 100 120 140 160 180
−50
−40
−30
−20
−10
0
10
20
30
40
50
Rotor Position (deg)
Back-EMF (V)
A C
(b)
B
FIGURE 37.8 The back-EMF of PMAC motors: (a) three-phase back-
EMF of PMSM and (b) three-phase back-EMF of BLDC motors.
motor (PMSM). These motors produce a sinusoidal back-
EMF, shown in Fig. 37.8a, and should be supplied with
sinusoidal current/voltage. The PMSM’s electronic control and
drive system uses continuous rotor position feedback and
PWM to supply the motor with the sinusoidal voltage or cur-
rent. With this, constant torque is produced with very little
ripple.
The second type of PMAC motor has a trapezoidal back-
EMF and is referred to as the brushless DC (BLDC) motor.
The back-EMF of the BLDC motor is shown in Fig. 37.8b. The
BLDC motor requires that quasi-rectangular-shaped currents
are fed into the machine. Alternatively, the voltage may be
applied to the motor every 120
◦
, with a current limit to hold
the currents within the motor’s capabilities.
37.4.1 Mathematical Model of the BLDC Motor
The phase variables are used to model the BLDC motor due to
its non-sinusoidal back-EMF and phase current. The terminal