Поксеваткин М.И. Проектирование и оптимизация процессов малоотходной горячей штамповки
Подождите немного. Документ загружается.

71
модуль 2 выбора и расчета магазинного компенсатора; модуль 3
выбора и расчета деформационного компенсатора; модуль 4 выбора
типоразмера оборудования при компенсации избытка металла за счет
упругой деформации системы пресс-штамп; в модуле 5 осуществляют
минимизацию объема заготовки; этот модуль является основным оп-
тимизационным модулем системы. Общее технологическое условие
минимизации избытка металла можно описать соотношением
:
V
рег
≥V
рас
≥V
фак
, (3.2)
где
V
рег
,, V
рас
,, V
фак
– соответственно регламентируемый, расчетный и
фактический относительные объемы заготовки
(V
заг
).
В модуле 6 осуществляют минимизацию технологической себе-
стоимости изготовления поковки; в модуле 7 минимизируется механи-
ческая обработка поковки и в модуле 8 проводят выбор оптимального
ТП с минимальной технологической себестоимостью детали.
3.2 Параметрическая характеристика поковок
Идентификация поковок при автоматизированном проектирова-
нии технологических процессов МГШ осуществляется на основе пара-
метрической классификации поковок [23,24].
Параметрическая классификации поковок включает ряд призна-
ков (модулей), достаточных для идентификации поковки, например,
геометрический образ (его информационное отображение, описывае-
мое соотношениями размеров, формулами, методом распознавания
образов и т.д.), степень сложности, массу и объем
поковки, технологи-
чески обоснованный объем избытка металла и место его размещения
на теле поковки, поверхность разъема штампа, класс точности поков-
ки, условную технологическую себестоимость поковки и т.п. Конкрет-
ные значения параметров этих признаков для данной поковки в сово-
купности образуют её параметрическую характеристику.
Выбор компенсатора заключается в верификации параметров по
-
ковки по соответствующим параметрам всех возможных типов КУ и
оценке степени соответствия идентифицированных типов КУ как па-
раметрической характеристике поковки в целом, так и каждому от-
дельно взятому параметру характеристики поковки с учетом их ком-
плексного влияния.
Значения верифицируемых признаков и их количество для поко-
вок КУ может синхронно меняться
в рамках адаптации используемой

72
САПР к условиям конкретного производства по усмотрению техноло-
га, ведущего разработку штамповой оснастки.
Значения параметров каждого признака параметрической класси-
фикации поковок заданы интервалами реальных величин, что обеспе-
чивает программную реализацию автоматизированного выбора КУ по
заданным конкретным параметрам поковки.
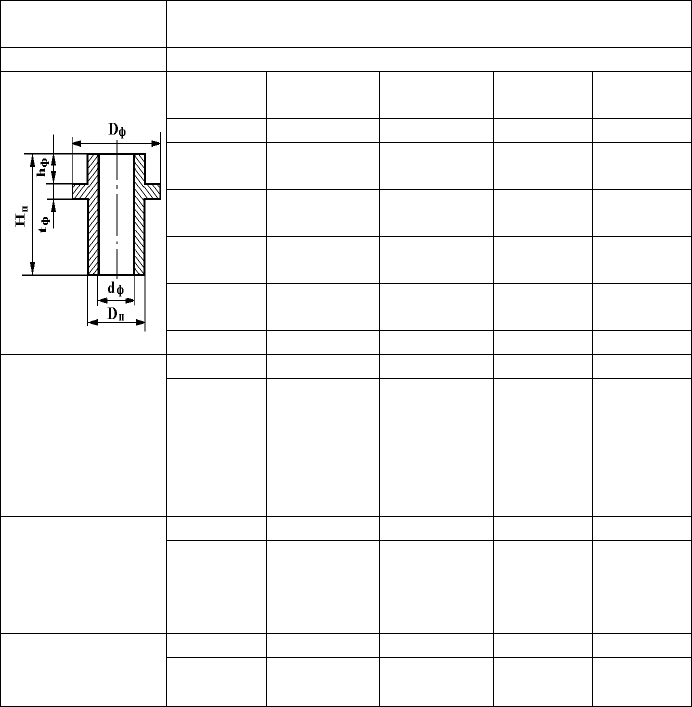
В качестве примера в таблице 3.1 приведена параметрическая ха-
рактеристика осесимметричной полой поковки
с фланцем.
Конкретная поковка имеет определенный геометрический образ и
может быть описана соотношениями размеров (отношением высоты
поковки
(H
п
) к её диаметру (D
п
) (H
п
/D
п
), соотношениями диаметров
отверстия
(d
п
) и поковки (D
п
) (d
п
/D
п
), отношением диаметра поковки
(D
п
) к диаметру фланца (D
ф
) (D
п
/D
ф
), толщиной фланца (t
ф
) и т.д.).
Исходя из геометрических соображений для такой поковки можно на-
значить определённый тип компенсатора, соответствующий её геомет-
рическому образу. Другая поковка того же типа может иметь соотно-
шения размеров, не соответствующие КУ, выбранному по геометриче-
скому образу для предыдущей поковки.
Учитывая сложность параметрической характеристики поковки,
всё пространство признаков
разбито на подпространства, каждое из
которых описывается совокупностью кодированных параметров. В
процессе кодирования параметры признаков конкретной поковки про-
ецируются в набор подпространств (модулей) параметрической клас-
сификации поковок. По кодированным значениям каждого модуля ус-
танавливается обобщенный код поковки.
Множество параметров каждого модуля целесообразно предста-
вить в виде гибридной матрицы в i-мерном
пространстве:
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
→→→
→→→
→→→
=
ip
p
p
ijijjjjj
ii
ii
p
Y
Y
Y
yxyxyx
yxyxyx
yxyxyx
M
...
...
............
...
...
2
1
2211
2222221212
1121211111
, (3.3)
где x
ij
– значение входного параметра (задается интервалом значений),
j=1…m – номер значения входного параметра, m – количество значе-
ний входного параметра, y
ij
– код интервала значений параметра, Y
ip
–
код параметра модуля (код интервала значений, в который попадает
величина входного параметра), получаемый после проецирования
входных данных конкретной поковки в набор параметров признака,
p=1…k – номер признака (модуля), k – количество признаков модулей.
73
Таблица 3.1 – Параметрическая классификация осесимметричных по-
лых поковок с фланцем
Признаки по-
ковки
Параметры признаков поковки
1 2
1 Геометриче-
ский образ
х
1
=
Н
n
/D
п
х
2
=d
п
/D
п
x
3
=D
п
/D
ф
x
4
=t
ф
0,3…1,0 0,1…0,2 0,5…0,6 3…5
1,05…2,
0
0,21…0,3 0,61…0,7 5,1…6,5
2,05…3,
0
0,31…0,4 0,71…0,8 6,6…8,0
3,05…4,
0
0,41…0,5 0,81…0,9 8,1…9,6
4,05…5,
0
0,51…0,7 9,7…12
12,1…15
2 Степень слож-
ности (отноше-
ние массы по-
ковки к массе
описывающей
поковку фигуры
С=М
п
/М
о
ф
)
х
5
= С1 х
6
=С2 х
7
=С3 x
8
=С4
1 ÷ 0,63 0,62
÷
0,33 0,32
÷
0,16
<0,16
3 Поверхность
разъема штампа
по:
х
9
х
10
х
11
х
12
верхне-
му торцу
поковки
верхней
поверхно-
сти флан-
ца
нижней
поверхно-
сти флан-
ца
нижнему
торцу
поковки
4 Точность по-
ковки
(К
п
=М
д
/М
п
)
х
13
→Т1 х
14
→Т2 х
15
→Т3 х
16
→Т4 х
17
→Т5
0,84
÷
0,86
0,87
÷
0,89 0,90
÷
0,92 0,93
÷
0,95
0,96 ÷
0,98

74
Для обобщенного кодирования поковки формируется матрица из
кодов параметров модулей по каждому признаку
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
pi
i
i
ipii
p
p
N
N
N
YYY
YYY
YYY
Z
...
...
............
...
...
2
1
21
22221
11211
, (3.4)
где
N
pi
– коды признаков.
В матрицах (3.3) и (3.4) введены текущие значения символов i, j и
p, так как их конечные значения (n, m и k) для конкретного вида поко-
вок могут быть различными.
В результате идентификации формируется обобщенный код гиб-
ридной модели поковки
pi
NN = .
Ниже рассмотрен принцип параметрической характеристики по-
ковок и процесс формирования кода одного модуля (признака) – гео-
метрического образа поковки на примере осесимметричной полой по-
ковки с фланцем.
Поковка имеет определенный геометрический образ и может
быть описана соотношениями размеров (таблица 3.1).
Совокупность этих соотношений и образует геометрический об-
раз поковки как конкретный модуль (
признак) её параметрической ха-
рактеристики. Численные выражения соотношений размеров при этом
являются значениями параметров геометрического образа данной по-
ковки.
Расчет параметров поковки (таблица 3.1) проводят согласно при-
веденному принципу классификации:
Х1 = Нп/Dп = 130/30 = 4,33;
Х2 = dп/Dп = 10/30 = 0,333;
Х3 = Dп/Dф = 30/50 = 0,6;
Х4= tф = 9.
Геометрический образ является первым признаком параметриче-
ской характеристики поковки. В этом случае
р=1. Согласно классифи-
кации, представленной в таблице 3.1, множество параметров 1-го мо-
дуля представляют в виде гибридной матрицы в 4-х мерном простран-
стве:

75
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
→→→
→→→
→→→
=
1
21
11
2211
2222221212
1121211111
1
...
...
............
...
...
i
ijijjjjj
ii
ii
Y
Y
Y
yxyxyx
yxyxyx
yxyxyx
M
=
() ( )
(
)
(
)
()( )( )( )
()( )( )()
()( )( )()
()( ) ()
()
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
→
→→→
→→→→
→→→→
→→→→
→→→→
=
4
1
3
5
6151,12
5127,957,051,05505,4
46,91,849,081,045,041,04405,3
386,638,071,034
,031,03305,2
25,61,527,061,023,021,02205,1
15316,05,012,01,0113,0
K
KKK
KKKK
KKKK
KKKK
KKKK
.
Первый столбец значений матрицы Z в этом случае будет являть-
ся кодом 1-го модуля, остальные столбцы – кодами 2-го, 3-го, 4-го и
т.д. модулей соответственно. Коды всех модулей параметрической ха-
рактеристики поковки формируются аналогично коду 1-го модуля. В
результате идентификации поковки по всем остальным признакам па-
раметрической характеристики матрица Z
может иметь, например, вид:
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
24
1311
34123
45435
Z
.
Обобщенный код гибридной модели поковки в этом случае будет
выглядеть следующим образом
N = 5314 321 413 54 4312, где груп-
пы чисел 5314, 321, 413 и т.д. – коды модулей, расположенные в ие-
рархическом порядке.
Для реализации автоматизированного выбора типов КУ, произво-
димого на основе представленной кодированной параметрической ха-
рактеристики поковки, построенной с использованием иерархической
гибридной модели, необходимо, чтобы характеристика соответствую-
щего КУ была построена по тому же принципу и её
обобщенный код
совпадал с кодом поковки.
Пример параметрической классификации горячештампованных
поковок по геометрическому образу представлен в таблице 3.2.
76
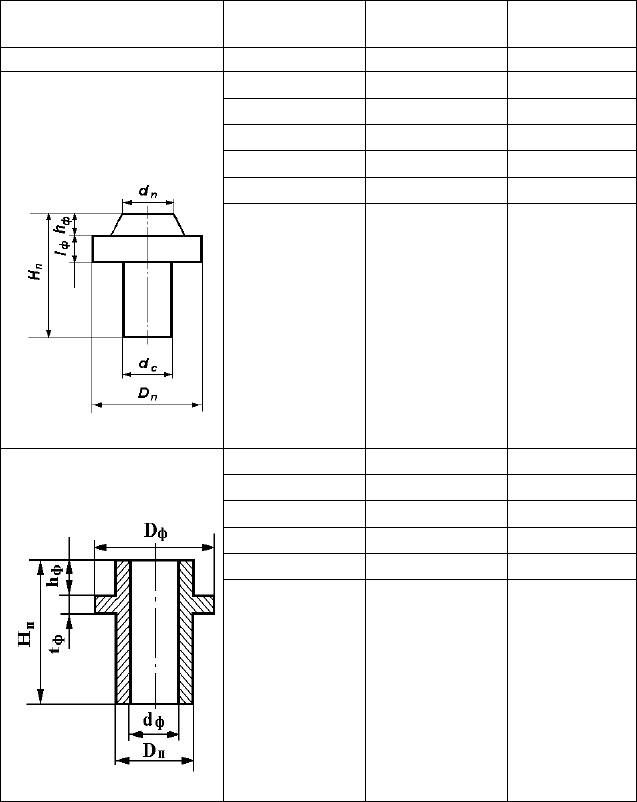
Таблица 3.2 – Параметрическая классификация горячештампованных
поковок по геометрическому образу
Вид поковки/
условное обозначение
Параметры Значение па-
раметров
Код пара-
метров
1 2 3 4
Осесимметричные
сплошные типа стерж-
ня с утолщением (вы-
давливание)
П1
Dп/Нп
0,6…2,8
Dп/dп
6.5…1,3
Dп/Dc
1.2…3,6
tф/Hп
0,1…0,82
(hф+tф)/Hп
0,25…0,8
hф/Hп
0,10…0,60
Осесимметричные по-
лые, типа фланцевых
втулок (осаживание)
П2
Dп/Нп
0.5…3,5
Dп/dп
1,5…4,5
Dп/Dф
0,3…0,9
tф/Hп
0,1…0,7
(hф+tф)/Hп
0,2…0,9
hф/Hп
0,1…0,6
77
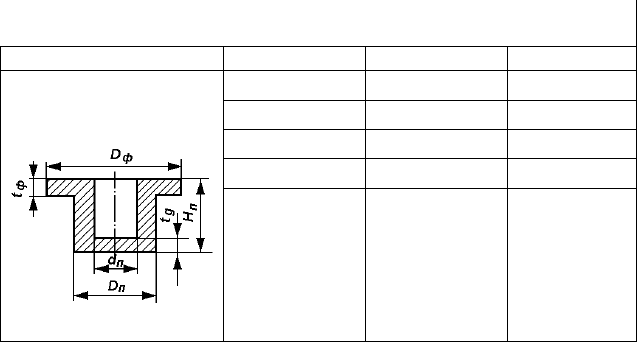
Продолжение таблицы 3.2
1 2 3 4
Осесимметричные по-
лые, типа стакана с
фланцем
П3
Dп/Нп
0,5…3,0
Dп/dп
1,5…4,5
Dп/Dф
0,3…0,9
tф/Hп
0,1…0,6
tq/Hп
0.1…0,7
Для идентификации КУ по соответствующим признакам поковки
разработана иерархическая гибридная модель, представленная в виде
модульного алгоритма.
Методологическую основу модели идентификации КУ штампов
МГШ составляют следующие принципы:
- адекватность признаков параметрических характеристик поко-
вок и КУ;
- возможность квалиметрии суммарной значимости признаков
КУ в процессе идентификации;
- возможность верификации признаков поковки
в иерархиче-
ской последовательности.
3.3 Принципы верификации параметров поковок и компен-
сационных устройств
В общем случае выбор компенсатора определённой характери-
стики, соответствующей параметрам поковки, описывается норматив-
ной параметрической моделью. Такая модель должна реализовать вы-
бор экономически наиболее целесообразного способа компенсации
избытка металла, обеспечивающего формирование поковки и своевре-
менное удаление избытка металла.
В качестве нормативной параметрической модели можно принять
целевую функцию вида [26]:
78
),...,,;,...,,,(),,(
2121 mn
yyyxxxWQYXWQ = ,(3.5)
где
Q – целевая функция; W - исходная информация, включающая
массу поковки, годовую программу выпуска, типоразмер оборудова-
ния, информацию о сложности, точности и геометрических параметрах
поковки и т.д.;
y
1
, y
2
,…, y
m
– управляемые параметры; x
1
, x
2
,…, x
m
–
неуправляемые параметры [16, 25, 26].
Ограничения могут быть заданы в алгоритмическом виде:
DYXWF ⊂),,(
, (3.6)
где
D – допустимая область использования параметров поковки и
технологического процесса штамповки.
Параметрическая характеристика КУ может быть представлена:
1) в виде совокупности конкретных значений параметров ком-
пенсатора, строго соответствующих параметрам поковки;
2) в виде кодированных значений параметров характеристики
КУ, соответствующих кодированным значениям параметров поковки;
3) в общем виде как взаимосвязь определенных значений (или
диапазонов значений
) параметров поковки и набора типов КУ, соот-
ветствующих данному значению (диапазону значений).
Параметрический классификатор КУ может быть описан не-
сколькими признаками: характером функционального действия, гео-
метрическим образом закрытой полости штампа, видом поверхности
разъема штампа, характером размещения компенсационной полости в
штампе, конструкцией компенсационной полости, степенью сложности
полости
(Vп/Vоф), точностью полости (Vд/Vп), рекомендуемым со-
противлением деформации в полости штампа и др.
Выбор КУ основан на характерных признаках поковки, иденти-
фицированных с соответствующими признаками КУ. Верификация
признаков того или иного КУ характерным признакам поковки являет-
ся одной из важных задач при разработке САПР ТП.
Ниже приведена методика верификации признаков поковки по
соответствующим признакам
КУ на основе оценки уровней значимо-
сти каждого признака (модуля).
Исходные данные для верификации у представлены в таблице 3.3,
расчёт результатов верификации в табл.3.4.
79
Таблица 3.3 – Исходные данные для верификации
Наименование исходных данных Обозначение, расчетная
формула
1 Номер признака (модуля)
i =1,...., I
2 Количество показателей каждо-
го признака
k
i
3 Уровень значимости каждого
показателя
z
i
4 Уровень значимости каждого
признака (модуля)
γ
i
= k
i
⋅
z
i
5 Условный уровень значимости
КУ
∑
=
=
Г
1i
i
γϕ
Таблица 3.4 – Расчет результатов верификации
Наименование расчетных параметров Обозначение, расчетная
формула
1 Количество верифицированных пока-
зателей в каждом признаке
Рk
i
2 Уровень соответствия каждого при-
знака
∑
=
⋅=
I
i
ikk
zP
ii
1
α
3 Суммарный уровень соответствия
признаков
∑
=
=
I
i
k
i
c
1
α
4 Степень соответствия признаков КУ и
поковки, в процентах
%100⋅
⎟
⎠
⎞
⎜
⎝
⎛
=
ϕ
ρ
c
Пример расчёта результатов верификации представлен в таблице
3.5.
Полученную в результате верификации параметрических призна-
ков выборку КУ, со степенью соответствия, к примеру, не ниже 83%,
исследуют по критериям оптимизации: минимизация технологической
себестоимости поковки, трудоемкости последующей механической
обработки, обеспечение повышенного качества поковок, работоспо-
собности штампа и другим критериям в соответствии с требованиями
конкретного
производства.
80
Таблица 3.5 – Пример расчёта результатов верификации
Расчётные параметры Обозначение Результаты верификации
1. Номер признака
I=1,…,I
1 2 3 4 5
2.Количество показа-
телей признака
k
i
5 5 4 3 4
3.Уровень значимо-
сти каждого показа-
теля (весовой коэф-
фициент
z
i
7 5 4.5 4 2.5
4.Уровень значимо-
сти каждого признака
(модуля)
γ
i
=k
i
⋅
z
i
35 25 18 12 10
5.Условный уровень
значимости КУ
∑
=
=
I
1i
i
γϕ
100
6.Количество соот-
ветствующих показа-
телей в каждом при-
знаке
Pk
i
4 5 3 3 2
7.Уровень соответст-
вия каждого признака
в абсолютных и от-
носительных едини-
цах
∑
=
⋅=
I
1i
ikk
zP
i
α
8.0
28
1.0
25
75.0
5.13
0.1
12
5.0
5
8.Суммарный уро-
вень значимости со-
ответствующих по-
ковке признаков КУ
∑
=
=
I
1i
k
i
с
α
с=28+25+13.5+12+5=83.5
9.Степень соответст-
вия признаков КУ и
поковки в процентах
%100
)/с(
⋅
⋅
=
ϕ
ρ
ρ
=(83,5/100)
⋅
100%=83,5%
Принципы оценки степени соответствия признаков используются
при разработке параметрического классификатора КУ штампов МГШ.