Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.


Automating Errors and Conflicts Prognostics and Prevention 30.1 Definitions 505
Table 30.2 Examples of errors and conflicts in service automation
Error Conflict
•
The engine of an airplane shuts down unexpect-
edly during the flight
•
A patient’s electronic medical records are acci-
dently deleted during system recovery
•
A pacemaker stops working
•
Traffic lights go off due to lightening
•
A vending machine does not deliver drinks or
snacks after the payment
•
Automatic doors do not open
•
An elevator stops between two floors
•
A cellphone automatically initiates phone calls
due to a software glitch
•
The time between two flights in an itinerary gen-
erated by an online booking system is too short for
transition from one flight to the other
•
A ticket machine sells more tickets than the num-
berofavailableseats
•
An AT M machine dispenses $ 250 when
a customer withdraws $260
•
A translation software incorrectly interprets text
•
Two surgeries are scheduled in the same room
due to a glitch in a sensor that determines if the
room is empty
flicts. An error is defined as
∃E
u
r,i
(t)
, if ϑ
i
(t)
Dissatisfy
−−−−−→con
r
(t) . (30.1)
E
u
r,i
(t)
is an error, u
i
(t) is unit i in a system at time t,
ϑ
i
(t) is unit i’s state at time t that describes what has oc-
curred with unit i by time t,con
r
(t) denotes constraintr
in the system at time t,and
Dissatisfy
−−−−−→denotes that a con-
straint is not satisfied. Similarly, a conflict is defined
as
∃C
[
n
r
(t)
]
, if θ
i
(t)
Dissatisfy
−−−−−→con
r
(t) . (30.2)
C
[
n
r
(t)
]
is a conflict and n
r
(t) is a network of units
that need to satisfy con
r
(t) at time t. The use of con-
straints helpsdefine errorsand conflictsunambiguously.
A constraint is the system specification, expectation,
comparison objective or acceptable difference between
different units’ goals, plans, tasks or other activities.
Tables 30.1 and 30.2 illustrate errors and conflicts in
automation with some typical examples. There are also
human errors and conflicts that exist in automation
systems. Figure 30.1 describes the difference between
errors and conflicts in pin insertion.
This Chapter provides a theoretical background and
illustrates applicationsof how to prevent errors and con-
flicts automatically in production and service. Different
terms have been used to describe the concept of er-
rors and conflicts, for instance, failure (e.g., [30.2–5]),
fault (e.g., [30.4, 6]), exception (e.g., [30.7]), and flaw
(e.g., [30.8]). Error and conflict are the most popular
terms appearing inliterature (e.g., [30.3,4,6,9–15]).The
related terms listed here are also useful descriptions of
errors and conflicts. Depending on the context, some of
these terms are interchangeable with error; some are in-
terchangeable with conflict; and the rest refer to both
error and conflict.
Eight key functions have been identified as useful
to prevent errors and conflicts automatically as de-
scribed below [30.16–19]. Functions 5–8 prevent errors
and conflicts with the support of functions 1–4. Func-
tions 6–8 prevent errors and conflicts by managing
those that have already occurred. Function 5, prognos-
tics, is the only function that actively determines which
errors and conflicts will occur, and prevents them. All
other seven functions are designed to manage errors
and conflicts that have already occurred, although as
a result they can prevent future errors and conflicts
directly or indirectly. Figure 30.2 describes error and
conflict propagation andtheir relationshipwith theeight
functions:
1. Detection is a procedure to determine if an error or
a conflict has occurred.
2. Identification is a procedure to identify the observa-
tion variables most relevant to diagnosing an error
or conflict; it answers the question: Which of them
has already occurred?
3. Isolation is a procedure to determine the exact loca-
tion of an error or conflict. Isolation provides more
information than identification function, in which
only the observation variables associated with the
error or conflict are determined. Isolation does not
provide as much information as the diagnostics
function, however, in which the type, magnitude,
Part C 30.1
506 Part C Automation Design: Theory, Elements, and Methods
Propagation
Prognostics
Diagnostics
Detection
Identification
Isolation
Error recovery
Conflict resolution
Exception handling
Occurrence
PropagationPropagation
E[u(r
2
,i,t)]
C[n(r
1
,t)]
u(i,t)
n(r
1
,t)
Error
conflicts
Error
conflicts
Fig. 30.2 Error and conflict propagation and eight functions to pre-
vent errors and conflicts
and time of the error or conflict are determined. Iso-
lation answers the question: Where has an error or
conflict occurred?
4. Diagnostics is a procedure to determine which er-
ror or conflict has occurred, what their specific
characteristics are, or the cause of the observed out-
of-control status.
5. Prognostics is a procedure to prevent errors and con-
flicts through analysis and prediction of error and
conflict propagation.
6. Error recovery is a procedure to remove or mitigate
the effect of an error.
7. Conflict resolution is a procedure to resolve a con-
flict.
8. Exception handling is a procedure to manage ex-
ceptions. Exceptions are deviations from an ideal
process that uses the available resources to achieve
the task requirement (goal) in an optimal way.
There has been extensive research on the eight func-
tions, except prognostics. Various models, methods,
tools, and algorithms have been developed to automate
the management of errors and conflicts in production
and service. Their main limitation is that most of them
are designed for a specific application area, or even
a specific error or conflict. The main challenge of au-
tomating the management of errors and conflicts is how
to preventthem throughprognostics, which is supported
by the other seven functions and requires substantial
research and developments.
30.2 Error Prognostics and Prevention Applications
30.2.1 Error Detection in Assembly
and Inspection
As the first step to prevent errors, error detection
has attracted much attention, especially in assembly
and inspection; for instance, researchers [30.3]have
studied an integrated sensor-based control system for
a flexible assembly cell which includes error detection
function. An error knowledge base has been devel-
oped to store information about previous errors that had
occurred in assembly operations, and corresponding re-
covery programs which had been used to correct them.
The knowledge base provides support for both error
detection and recovery. In addition, a similar machine-
learning approach to error detection and recovery in
assembly has been discussed. To realize error recovery,
failure diagnostics has been emphasized as a necessary
step after the detection and before the recovery. It is
noted that, in assembly, error detection and recovery are
often integrated.
Automatic inspection has been applied in various
manufacturing processes to detect, identify, and isolate
errors or defects with computer vision. It is mostly used
to detect defects on printedcircuit board [30.20–22]and
dirt in paper pulps [30.23, 24]. The use of robots has
enabled automatic inspection of hazardous materials
(e.g., [30.25]) and in environments that human opera-
tors cannotaccess, e.g.,pipelines [30.26]. Automatic in-
spection has also been adopted to detect errors in many
other products such as fuel pellets [30.27], printing the
contents of soft drink cans [30.28], oranges [30.29], air-
craft components [30.30], and microdrills [30.31]. The
key technologies involved in automatic inspection in-
clude but are not limited to computer or machine vision,
feature extraction, and pattern recognition [30.32–34].
30.2.2 Process Monitoring
and Error Management
Process monitoring, or fault detection and diagnostics
in industrial systems, has become a new subdiscipline
within the broad subject of control and signal pro-
cessing [30.35]. Three approaches to manage faults for
process monitoring are summarized in Fig. 30.3. The
Part C 30.2
Automating Errors and Conflicts Prognostics and Prevention 30.2 Error Prognostics and Prevention Applications 507
analytical approach generates features using detailed
mathematical models. Faults can be detected and di-
agnosed by comparing the observed features with the
features associated with normal operating conditions
directly or after some transformation [30.19]. The data-
driven approach applies statistical tools on large amount
of data obtained from complex systems. Many qual-
ity control methods are examples of the data-driven
approach. The knowledge-based approach uses qualita-
tive models to detect and analyze faults. It is especially
suited for systems in which detailed mathematical mod-
els are not available. Among these three approaches, the
data-driven approach is considered most promising be-
cause of its solid theoretical foundation compared with
the knowledge-based approach and its ability to deal
with large amount of data compared with the analyti-
cal approach. The knowledge-based approach, however,
has gained much attention recently. Many errors and
conflicts can be detected and diagnosed only by experts
who have extensive knowledge and experience, which
need to be modeled and captured to automate error and
conflict prognostics and prevention.
30.2.3 Hardware Testing Algorithms
The three fault management approaches discussed in
Sect.30.2.2 can also be classified according to the way
that a system is modeled. In the analytical approach,
quantitative models are used which require thecomplete
specification of system components, state variables, ob-
served variables, and functional relationships among
them for the purpose of fault management. The data-
driven approach can be considered as the effort to
develop qualitative models in which previous and cur-
rent data obtained from a system are used. Qualitative
models usually require less information about a sys-
tem than do quantitative models. The knowledge-based
approach uses qualitative models and other types of
models; for instance, pattern recognition techniques
use multivariate statistical tools and employ qualitative
models, whereas the signed directed graph is a typical
dependence model which represents the cause–effect
relationships in the form of a directed graph [30.36].
Similar to algorithms used in quantitative and
qualitative models, optimal and near-optimal test se-
quences have been developed to diagnose faults in
hardware [30.36–45]. The goal of the test sequencing
problem is to design a test algorithm that is able to
unambiguously identify the occurrence of any system
state (faulty or fault-free state) using the test in the test
set and minimizes the expected testing cost [30.37].
Analytical
approach
Data-driven
approach
Parameter estimation
Observers
Parity relations
Shewhart charts
Cumulative sum (CUSUM) charts
Exponentially weighted moving
average (EWMA) charts
Univariate
statistical
monitoring
Principal component analysis (PCA)
Signed directed graph (SDG)
Symptom tree model (STM)
Artificial neural networks (ANN)
Self-organizing map (SOM)
Fisher discriminant analysis (FDA)
Partial least squares (PLS)
Canonical variate analysis (CVA)
Multivariate
statistical
techniques
Knowledge-
based
approach
Causal
analysis
techniques
Expert systems
Pattern
recognition
techniques
Fig. 30.3 Techniques of fault management in process monitoring
S
0
, S
1,
S
2
, S
3,
S
4
S
0
, S
3
S
0
S
3
T
3
T
2
p
pf
S
2
S
1
T
2
pf
S
1
, S
2
,
S
4
S
1
, S
2
S
4
T
1
pf
f
p Test passes
f Test fails
OR node
AND node
Fig. 30.4 Single-fault test strategy
The test sequencing problem belongs to the general
class of binary identification problems. The problem to
diagnose single fault is a perfectly observed Markov
decision problem (MDP). The solution to the MDP is
a deterministic AND/OR binary decision tree with OR
nodes labeled by the suspect set of system states and
AND nodes denoting tests (decisions) (Fig.30.4). It is
Part C 30.2
508 Part C Automation Design: Theory, Elements, and Methods
12345
678910
11 12 13 14 15
Component with test
Component without test
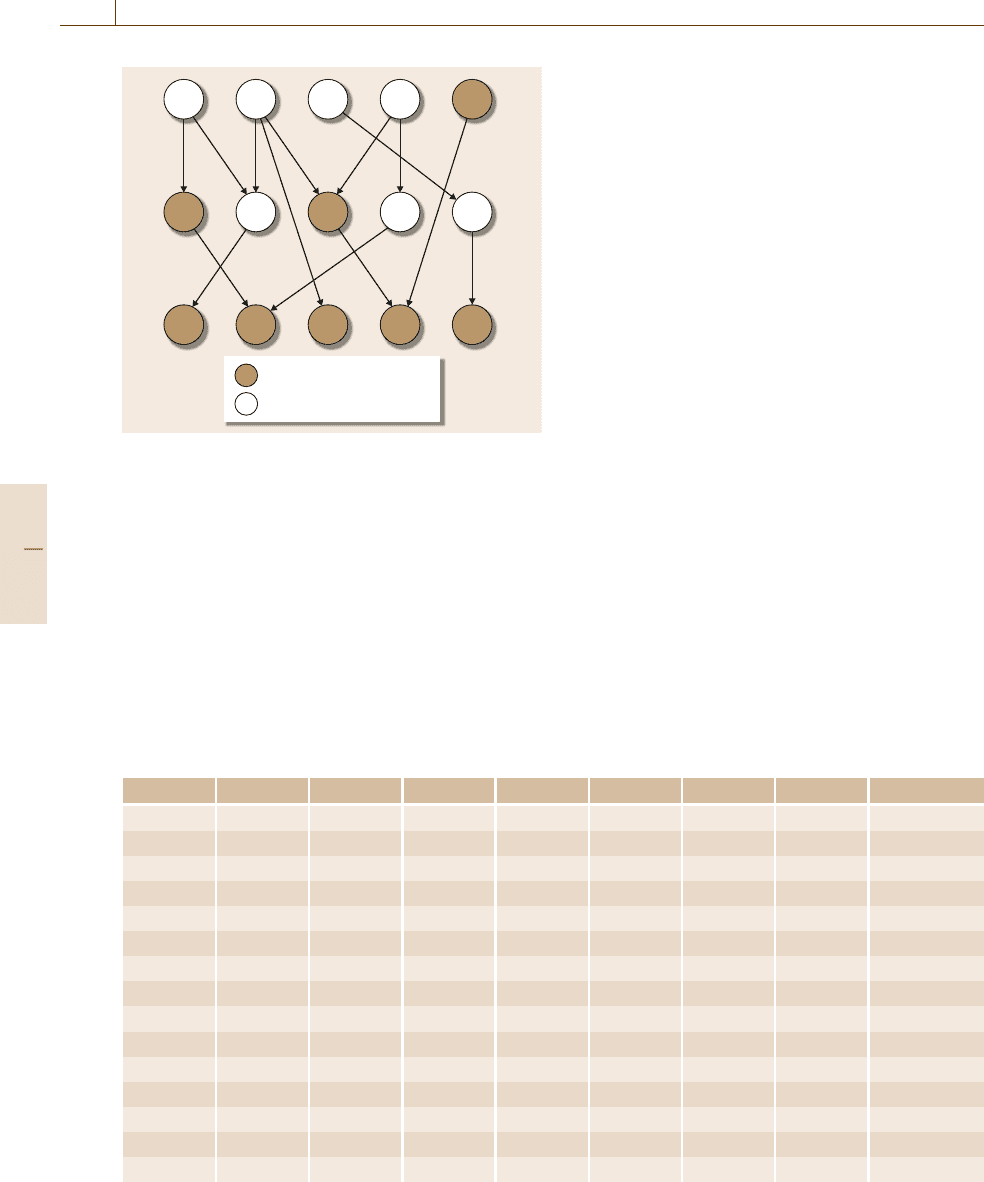
Fig. 30.5 Digraph model of an example system
well known that theconstruction of the optimal decision
tree is an NP-complete problem [30.37].
To subdue the computational explosion of the opti-
mal test sequencing problem, algorithms that integrate
concepts from information theory and heuristic search
have been developed and were first used to diag-
nose faults in electronic and electromechanical systems
with a single fault [30.37]. An X-Windows-based soft-
ware tool, the testability engineering and maintenance
system (TEAMS), has been developed for testabil-
ity analysis of large systems containing as many as
Table 30.3 D-matrix of the example system derived from Fig.30.5
State/test T
1
(5) T
2
(6) T
3
(8) T
4
(11) T
5
(12) T
6
(13) T
7
(14) T
8
(15)
S
1
(1) 0 1 0 1 1 0 0 0
S
2
(2) 0 0 1 1 0 1 1 0
S
3
(3) 0 0 0 0 0 0 0 1
S
4
(4) 0 0 1 0 1 0 1 0
S
5
(5) 1 0 0 0 0 0 1 0
S
6
(6) 0 1 0 0 1 0 0 0
S
7
(7) 0 0 0 1 0 0 0 0
S
8
(8) 0 0 1 0 0 0 1 0
S
9
(9) 0 0 0 0 1 0 0 0
S
10
(10) 0 0 0 0 0 0 0 1
S
11
(11) 0 0 0 1 0 0 0 0
S
12
(12) 0 0 0 0 1 0 0 0
S
13
(13) 0 0 0 0 0 1 0 0
S
14
(14) 0 0 0 0 0 0 1 0
S
15
(15) 0 0 0 0 0 0 0 1
50000 faults and 45000 test points [30.36]. TEAMS
can be used to model individual systems and gener-
ate near-optimal diagnostic procedures. Research on
test sequencing then expanded to diagnose multiple
faults [30.41–45] in various real-world systems includ-
ing the Space Shuttle’s main propulsion system. Test
sequencing algorithms with unreliable tests [30.40]and
multivalued tests [30.45] have also been studied.
To diagnose a single fault in a system, the relation-
ship between the faulty states and tests can be modeled
by directed graph (digraph model) (Fig. 30.5). Once
a system is described in a diagraph model, the full or-
der dependences among failure states and tests can be
captured by a binary test matrix, also called a depen-
dency matrix (D-matrix, Table 30.3). Other researchers
have used digraph model to diagnose faults in hyper-
cube microprocessors [30.46]. The directed graph is
a powerful tool to describe dependences among system
components and tests.
Three important issues have been brought to light
by extensive research on test sequencing problem and
should be considered when diagnosing faults for hard-
ware:
1. The order of dependences. The first-order cause–
effect dependence between two nodes, i. e., how
a faulty node affects another node directly, is
the simplest dependence relationship between two
nodes. Earlier research did not consider the de-
pendences among nodes [30.37, 38], whereas in
Part C 30.2

Automating Errors and Conflicts Prognostics and Prevention 30.2 Error Prognostics and Prevention Applications 509
most recent research different algorithms and test
strategies have been developed with the considera-
tion of not only the first-order, but also high-order
dependences among nodes [30.43–45]. The high-
order dependences describe relationships between
nodes that are related to each other through other
nodes.
2. Types of faults. Faults can be classified into two
categories: functional faults and general faults.
A component or unit in a complex system may
have more than one function. Each function may
become faulty. A component may therefore have
one or more functional faults, each of which in-
volves only one function of the component. General
faults are those faults that cause faults in all func-
tions of a component. If a component has a general
fault, all its functions are faulty. Models that de-
scribe only general faults are often called worst-case
models [30.36] because of their poor diagnosing
ability;
3. Fault propagation time. Systems can be classified
into two categories: zero-time and nonzero-time
systems [30.45]. Fault propagation in zero-time sys-
tems is instantaneous to an observer, whereas in
nonzero-time systems it is several orders of magni-
tude slower than the response time of the observer.
Zero-time systems can be abstracted by taking the
propagation times to be zero.
Another interesting aspect of the test sequencing
problem is the list of assumptions that have been dis-
cussed in several articles, which are useful guidelines
for the development of algorithms for hardware testing:
1. At most one faulty state (component or unit) in
a system at any time [30.37]. This may be achieved
if the system is tested frequently enough [30.42].
2. All faults are permanent faults [30.37].
3. Tests can identify system states unambiguously
[30.37]. In other words, a faulty state is either iden-
tified or not identified. There is not a situation such
as: There is a 60% probability that a faulty state has
occurred.
4. Tests are 100% reliable [30.40,45]. Both false posi-
tive and false negative rates are zero.
5. Tests do not have common setup operations [30.42].
This assumption has been proposed to simplify the
cost comparison among tests.
6. Faults are independent [30.42].
7. Failure states that are replaced/repaired are 100%
functional [30.42].
8. Systems are zero-time systems [30.45].
Note the critical difference between assumptions 3
and 4. Assumption 3 is related to diagnostics ability.
When an unambiguous test detects a fault, the con-
clusion is that the fault has definitely occurred with
100% probability. Nevertheless, this conclusion could
be wrong if the false positive rate is not zero. This is the
test (diagnostics) reliability described in assumption 4.
When an unambiguous test does not detect a fault, the
conclusion is that the fault has not occurred with 100%
probability. Similarly, this conclusion could be wrong
if the false negative rate is not zero. Unambiguous tests
have better diagnostics ability than ambiguous tests. If
a fault has occurred, ambiguous tests conclude that the
fault has occurred with a probability less than one. Sim-
ilarly, if the fault has not occurred, ambiguous tests
conclude that the fault has not occurred with a proba-
bility less than one. In summary, if assumption 3 is true,
a test gives only two results: a fault has occurred or has
not occurred, always with probability1. If both assump-
tions 3 and 4 are true, (1) a fault must have occurred if
the test concludes that it has occurred, and (2) a fault
must have not occurred if the test concludes that it has
not occurred.
30.2.4 Error Detection in Software Design
The most prevalent method to detect errors in soft-
ware is model checking. As Clarke et al. [30.47] state,
model checking is a method to verify algorithmically
if the model of software or hardware design satisfies
given requirements and specifications through exhaus-
tive enumeration of all the states reachable by the
system and the behaviors that traverse them. Model
checking has been successfully applied to identify in-
correct hardware and protocol designs, and recently
there has been a surge in work on applying it to reason
about a wide variety of software artifacts; for exam-
ple, model checking frameworks have been applied to
reason about software process models, (e.g., [30.48]),
different families of software requirements models
(e.g., [30.49]), architectural frameworks (e.g., [30.50]),
design models (e.g., [30.51]), and system implemen-
tations (e.g., [30.52–55]). The potential of model
checking technology for (1) detecting coding errors
that are hard to detect using existing quality assurance
methods, e.g., bugs that arise from unanticipated in-
terleavings in concurrent programs, and (2) verifying
that system models and implementations satisfy crucial
temporal properties and other lightweight specifications
has led a number of international corporations and
government research laboratories such as Microsoft,
Part C 30.2
510 Part C Automation Design: Theory, Elements, and Methods
IBM, Lucent, NEC, the National Aeronautics and Space
Administration (NASA), and the Jet Propulsion Labo-
ratory (JPL) to fund their own software model checking
projects.
A drawback of model checking is the state-
explosion problem. Software tends to be less structured
than hardware and is considered as a concurrent but
asynchronous system. In other words, two independent
processes in software executing concurrently in either
order result in the same global state [30.47]. Failing to
execute checking because of too many states is a partic-
ularly serious problem for software. Several methods,
including symbolic representation, partial order reduc-
tion, compositional reasoning, abstraction, symmetry,
and induction, have been developed either to decrease
the number of states in the model or to accommodate
more states, although none of them has been able to
solve the problem by allowing a general number of
states in the system.
Based on the observation that software model
checking has been particularly successful when it can
be optimized by taking into account properties of a spe-
cific application domain, Hatcliff and colleagues have
developed Bogor [30.56], which is a highly modular
model-checking framework that can be tailored to spe-
cific domains. Bogor’s extensible modeling language
allows new modeling primitives that correspond to do-
main properties to be incorporated into the modeling
language as first-class citizens. Bogor’s modular archi-
tecture enables its core model-checking algorithms to
be replaced by optimized domain-specific algorithms.
Bogor has been incorporated into Cadena and tailored
to checking avionics designs in the common object re-
quest broker architecture (CORBA) component model
(CCM), yielding orders of magnitude reduction in
verification costs. Specifically, Bogor’s modeling lan-
guage has been extended with primitives to capture
CCM interfaces and a real-time CORBA (RT-CORBA)
event channel interface, and Bogor’s scheduling and
state-space exploration algorithms were replaced with
a scheduling algorithm that captures the particular
scheduling strategy of the RT-CORBA event chan-
nel and a customized state-space storage strategy that
takes advantage of the periodic computation of avionics
software.
Despite this successful customizable strategy, there
are additional issues that need to be addressed when
incorporating model checking into an overall de-
sign/development methodology. A basic problem con-
cerns incorrect or incomplete specifications: before
verification, specifications in some logical formalism
(usually temporal logic) need to be extracted from
design requirements (properties). Model checking can
verify if a model of the design satisfies a given speci-
fication. It is impossible, however, to determine if the
derived specifications are consistent with or cover all
design properties that the system should satisfy. That
is, it is unknown if the design satisfies any unspeci-
fied properties, which are often assumed by designers.
Even if all necessary properties are verified through
model checking, code generated to implement the de-
sign is not guaranteed to meet design specifications, or
more importantly, design properties. Model-based soft-
ware testing is being studied to connect the two ends in
software design: requirements and code.
The detection of design errors in software engineer-
ing has received much attention. In addition to model
checking and software testing, for instance, Miceli
et al. [30.8] has proposed a metric-based technique for
design flaw detection and correction. In parallel com-
puting, synchronization errors are major problems and
a nonintrusive detection method for synchronization er-
rors using execution replay has been developed [30.14].
Besides, concurrent error detection (CED)iswell
knownfor detecting errors in distributed computing sys-
tems and its use of duplications [30.9, 57], which is
sometimes considered a drawback.
30.2.5 Error Detection and Diagnostics
in Discrete-Event Systems
Recently, Petri nets have been applied in fault detection
and diagnostics [30.58–60] and fault analysis [30.61–
63]. Petri nets are formal modeling and analysis tool
for discrete-event or asynchronous systems. For hybrid
systems that have both event-driven and time-driven
(synchronous) elements, Petri nets can be extended to
global Petri nets to model both discrete-time and event
elements. To detect and diagnose faults in discrete-
event systems (DES), Petri nets can be used together
with finite-state machines (FSM) [30.64, 65]. The no-
tion of diagnosability and a construction procedure for
the diagnoser have been developed to detect faults in
diagnosable systems [30.64]. A summary of the use of
Petri nets in error detection and recovery before the
1990s can be found in the work of Zhou and DiCe-
sare [30.66].
To detect and diagnose faults with Petri nets, some
of the places in a Petri net are assumed observable and
others are not. All transitions in the Petri net are also
unobservable. Unobservable places, i.e., faults, indi-
cate that the number of tokens in those places is not
Part C 30.2

Automating Errors and Conflicts Prognostics and Prevention 30.2 Error Prognostics and Prevention Applications 511
observable, whereas unobservable transitions indicate
that their occurrences cannot be observed [30.58, 60].
The objective of the detection and diagnostics is to
identify the occurrence and type of a fault based on
observable places within finite steps of observation
after the occurrence of the fault. It is clear that to
detect and diagnose faults with Petri nets, system mod-
eling is complex and time consuming because faulty
transitions and places must be included in a model.
Research on this subject has mainly involved the exten-
sion of previous work using FSM and has made limited
progress.
Faults in discrete-event systems can be diagnosed
with the decentralized approach [30.67]. Distributed
diagnostics can be performed by either diagnosers
communicating with each other directlyor througha co-
ordinator. Alternatively, diagnostics decisions can be
made completely locally without combining the infor-
mation gathered [30.67]. The decentralized approach is
a viable direction for error detection and diagnostics in
large and complex systems.
30.2.6 Error Detection in Service
and Healthcare Industries
Errors tend to occur frequently in certain service in-
dustries that involve intensive human operations. As
the use of computers and other automation devices,
e.g., handwriting recognition and sorting machines
in postal service, becomes increasingly popular, er-
rors can be effectively and automatically prevented
and reduced to minimum in many service indus-
tries including delivery, transportation, e-Business, and
e-Commerce. In some other service industries, espe-
cially in healthcare systems, error detection is critical
and limited research has been conducted to help de-
velop systems that can automatically detect human
errors and other types of errors [30.68–72]. Several
systems and modeling tools have been studied and
applied to detect errors in health industries with the
help of automation devices (e.g., [30.73–76]). Much
more research needs to be conducted to advance the
development of automated error detection in service in-
dustries.
30.2.7 Error Detection and Prevention
Algorithms for Production
and Service Automation
The fundamental work system has evolved from
manual power, human–machine system, computer-
aided and computer-integrated systems, and then to
e-Work [30.77], which enables distributed and decen-
tralized operations where errors and conflicts propagate
and affect not only the local workstation, but the
entire production/service network. Agent-based algo-
rithms, e.g., (30.3), have been developed to detect
and prevent errors in the process of providing a sin-
gle product/service in a sequential production/service
line [30.78, 79]. Q
i
is the performance of unit i. U
m
and L
m
are the upper limit and lower limit, respec-
tively, of the acceptable performance of unit m. U
m
and
L
m
are the upper limit and lower limit, respectively, of
the acceptable level of the quality of a product/service
after the operation of unit m. Units 1 through m −1
complete their operation on a product/service before
unit m starts its operation on the same product/service.
An agent deployed at unit m executes (30.3)toprevent
errors
∃E(u
m
) , if
0
U
m
−L
m
<
m−1
i=1
Q
i
1
∪
0
L
m
−U
m
>
m−1
i=1
Q
i
1
.
(30.3)
In the process of providing multiple products/services,
traditionally, the centralized algorithm (30.4)isusedto
predict errors in a sequential production/service line.
I
i
(0) is the quantity of available raw materials for unit
i at time 0. η
i
is the probability a product/service is
within specifications after being operated by unit i,
assuming the product/service is within specifications
before being operated by unit i. ϕ
m
(t) is the needed
number of qualified products/services after the opera-
tion of unit m at time t. Equation (30.4) predicts at
time 0 the potential errors that may occur at unit m at
time t. Equation (30.4) is executed by a central control
unit that is aware of I
i
(0) and η
i
of all units. Equa-
tion (30.4) often has low reliability, i.e., high false
positive rates (errors are predicted but do not occur),
or low preventability, i. e., high false negative rate (er-
rors occur but are not predicted), because it is difficult
to obtain accurate η
i
when there are many units in the
system.
∃E[u
m
(t)], if
m
min
i=1
0
I
i
(
0
)
×
m
#
i
η
i
1
<ϕ
m
(t)
(30.4)
To improve reliability and preventability, agent-based
error prevention algorithms, e.g., (30.5), have been de-
Part C 30.2
512 Part C Automation Design: Theory, Elements, and Methods
Error Initial response
Known causes
Unknown causes
Contingent
action
Root causes
after error
analysis
Preventive
action
Circumstance
Fig. 30.6 Incident mapping
veloped to prevent errors in the process of providing
multiple products/services [30.80]. C
m
(t
) is the num-
ber of cumulative conformities produced by unit m by
time t
. N
m
(t
) is the number of cumulative noncon-
formities produced by unit m by time t
. An agent
deployed at unit m executes (30.5) by using infor-
mation about unit m −1, i.e., I
m−1
(t
), η
m−1
,and
C
m−1
(t
) to prevent errors that may occur at time t,
t
< t. Multiple agents deployed at different units can
execute (30.5) simultaneously to prevent errors. Each
agent can have its own attitude, i. e., optimistic or
pessimistic, toward the possible occurrence of errors.
Additional details about agent-based error prevention
algorithms can be found in the work by Chen and
Nof [30.80]:
∃E[u
m
(t)] if min
I
m
(t
), I
m−1
(t
)×η
m−1
+C
m−1
(t
)−N
m
(t
)
−C
m
(t
)
×η
m
+C
m
(t
)
<ϕ
m
(t), t
< t . (30.5)
30.2.8 Error-Prevention Culture (EPC)
To prevent errors effectively, an organization is ex-
pected to cultivate an enduring error-prevention culture
(EPC) [30.81], i.e., the organization knows what to do
to prevent errors when no one is telling it what to do.
The EPC model has five components [30.81]:
1. Performance management: the human performance
system helps manage valuable assets and involves
five key areas: (a) an environment to minimize
errors, (b) human resources that are capable of per-
forming tasks, (c) task monitoring to audit work,
(d) feedback provided by individuals or teams
through collaboration, and (e) consequences pro-
vided to encourage or discourage people for their
behaviors.
2. System alignment: an organization’s operating sys-
tems must be aligned to get work done with
discipline, routines, and best practices.
3. Technical excellence: an organization must promote
shared technical and operational understanding of
how a process, system or asset should technically
perform.
4. Standardization: standardization supports error pre-
vention with a balanced combination of good
manufacturing practices.
5. Problem-resolution skills: an organization needs
people with effective statistical diagnostics and
issue-resolution skills to address operational pro-
cess challenges.
Not all errors can be prevented manually and/or by
automation systems. When an error does occur, incident
mapping (Fig. 30.6) [30.81] as one of the exception-
handling tools can be used to analyze the error and
proactively prevent future errors.
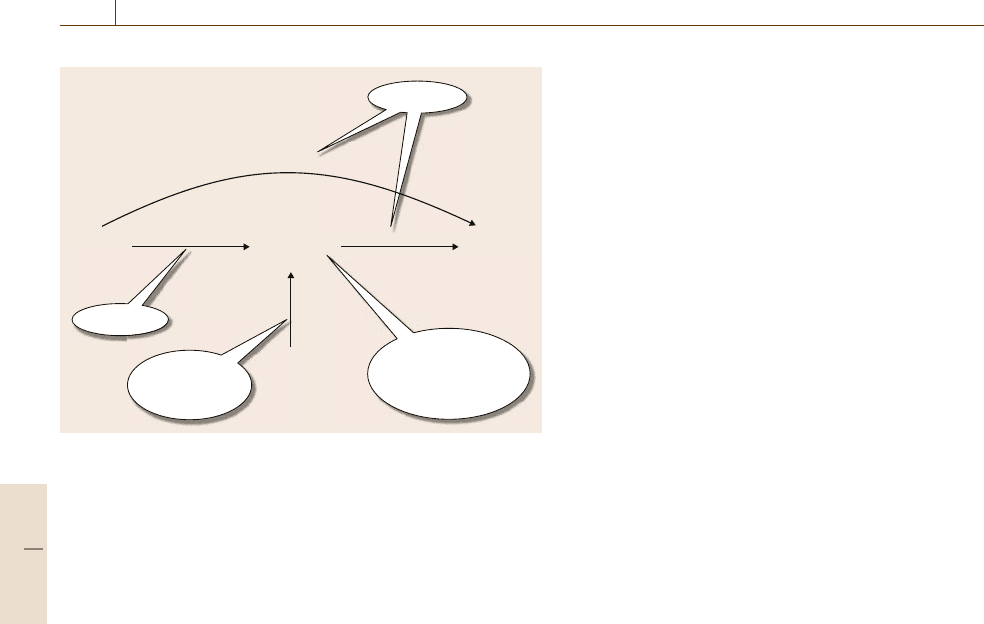
30.3 Conflict Prognostics and Prevention
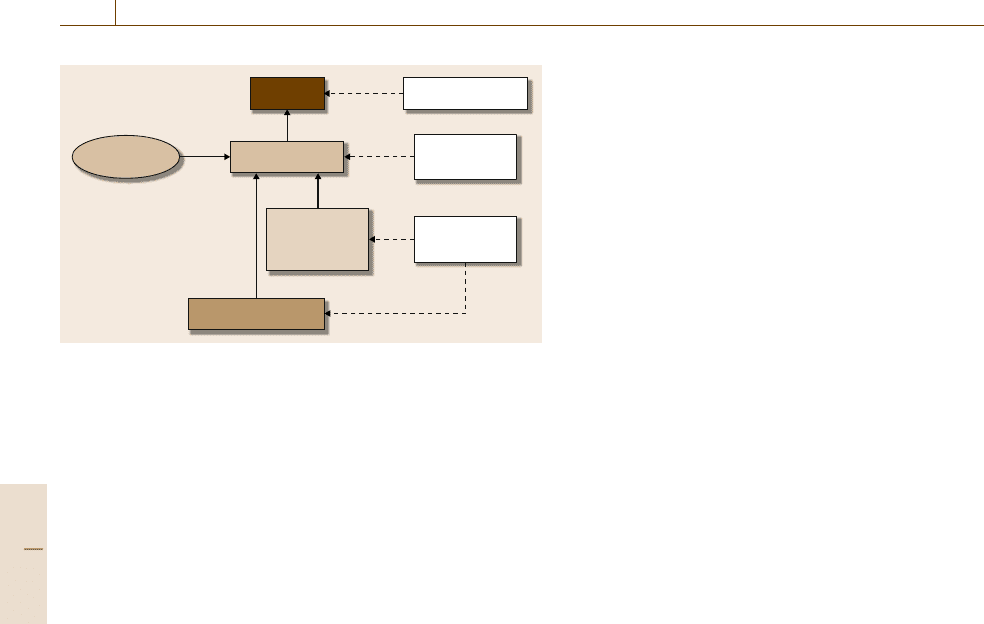
Conflicts can be categorized into three classes [30.82]:
goal conflicts, plan conflicts, and belief conflicts. Goals
of an agent are modeled with an intended goal struc-
ture (IGS; e.g., Fig. 30.7), which is extended from
a goal structure tree [30.83]. Plans of an agent are
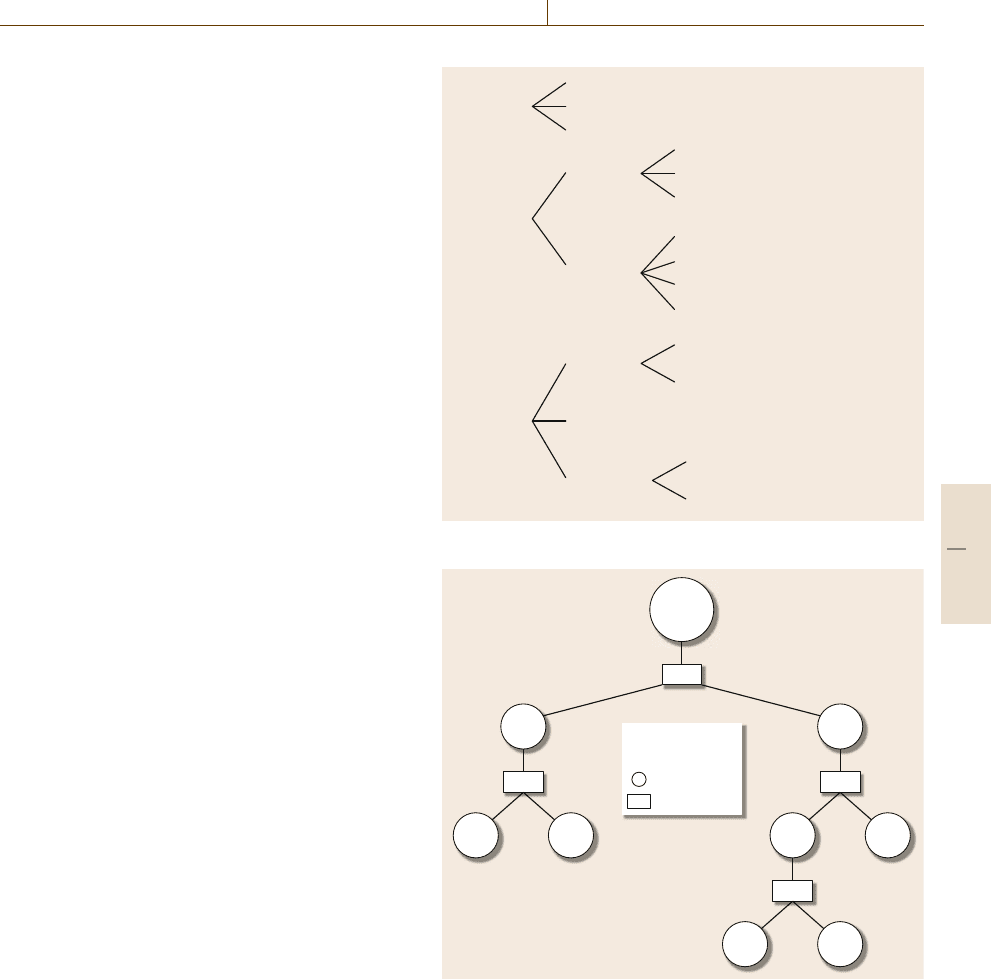
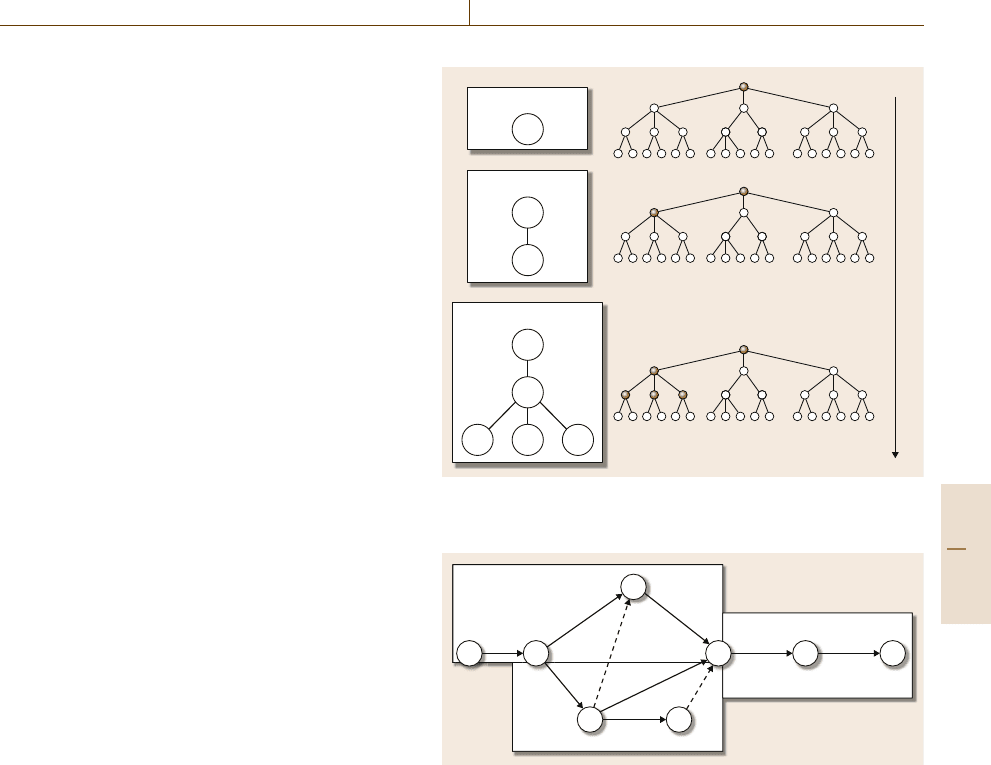
modeled with the extended project estimation and re-
view technique (E-PERT) diagram (e.g., Fig.30.8). An
agent has (1) a set of goals which are represented
by circles (Fig.30.7), or circles containing a number
(Fig.30.8), (2) activities such as Act 1 and Act 2 to
achieve the goals, (3) the time needed to complete an
activity, e.g., T1, and (4) resources, e.g., R1 and R2
(Fig.30.8). Goal conflicts are detected by comparing
goals by agents. Each agent has a PERT diagram and
plan conflicts are detected if agents fail to merge PERT
diagrams or the merged PERT diagrams violate certain
rules [30.82].
The three classes of conflicts can also be mod-
eled by Petri nets with the help of four basic
modules [30.84]: sequence, parallel, decision, and
Part C 30.3
Automating Errors and Conflicts Prognostics and Prevention 30.4 Integrated Error and Conflict Prognostics and Prevention 513
decision-free, to detect conflicts in a multiagent sys-
tem. Each agent’s goal and plan are modeled by
separate Petri nets [30.85], and many Petri nets are
integrated using a bottom-up approach [30.66, 84]
with three types of operations [30.85]: AND, OR,
and precedence. The synthesized Petri net is ana-
lyzed to detect conflicts. Only normal transitions and
places are modeled in Petri nets for conflict detec-
tion. The Petri-net-based approach for conflict detection
developed so far has been rather limited. It has empha-
sized more the modeling of a system and its agents
than the analysis process through which conflicts are
detected.
The three common characteristics of available con-
flict detection approaches are: (1) they use the agent
concept because a conflict involves at least two units in
a system; (2) an agent is modeled for multiple times be-
cause each agent has at least two distinct attributes: goal
and plan; and (3) they not only detect, but mainly pre-
vent conflicts because goals and plans are determined
before agents start any activities to achieve them. The
main difference between the IGS and PERT approach,
and the Petri net approach is that agents communi-
cate with each other to detect conflicts in the former
approach whereas a centralized control unit analyzes
the integrated Petri net to detect conflicts in the lat-
ter approach [30.85]. The Petri net approach does not
detect conflictsusing agents,although systems are mod-
eled with agent technology. Conflict detection has been
mostly applied in collaborative design [30.86–88]. The
ability to detect conflicts in distributed design activities
is vital to their success because multiple designers tend
to pursue individual (local) goals prior to considering
common (global) goals.
Time
Agent A's IGS
A
0
Agent A's IGS
A
0
Agent A's IGS
A
0
A
1
A
1
A
5
A
6
A
4
Fig. 30.7 Development of agent A’s intended goal structure (IGS)
over time
Agent 1
Agent 2
Agent 3
5
2
34
1
Act6, T6
Act1, T1
Act3, T3
Act5, T5
Act2, T2
Act4, T4
R3
R1
R2
R2
R1
R1
76
Act7, T7
R3
8
Act8, T8
R3, R4
Dummy
Dummy
Fig. 30.8 Merged project estimation and review technique (PERT)
diagram
30.4 Integrated Error and Conflict Prognostics and Prevention
30.4.1 Active Middleware
Middleware wasoriginally defined as software that con-
nects two separate applications or separate products
and serves as the glue between two applications; for
example, in Fig.30.9, middleware can link several dif-
ferent database systems to several different web servers.
The middleware allows users to request data from any
database system that is connected to the middleware us-
ing the form displayed on the web browser of one of the
web servers.
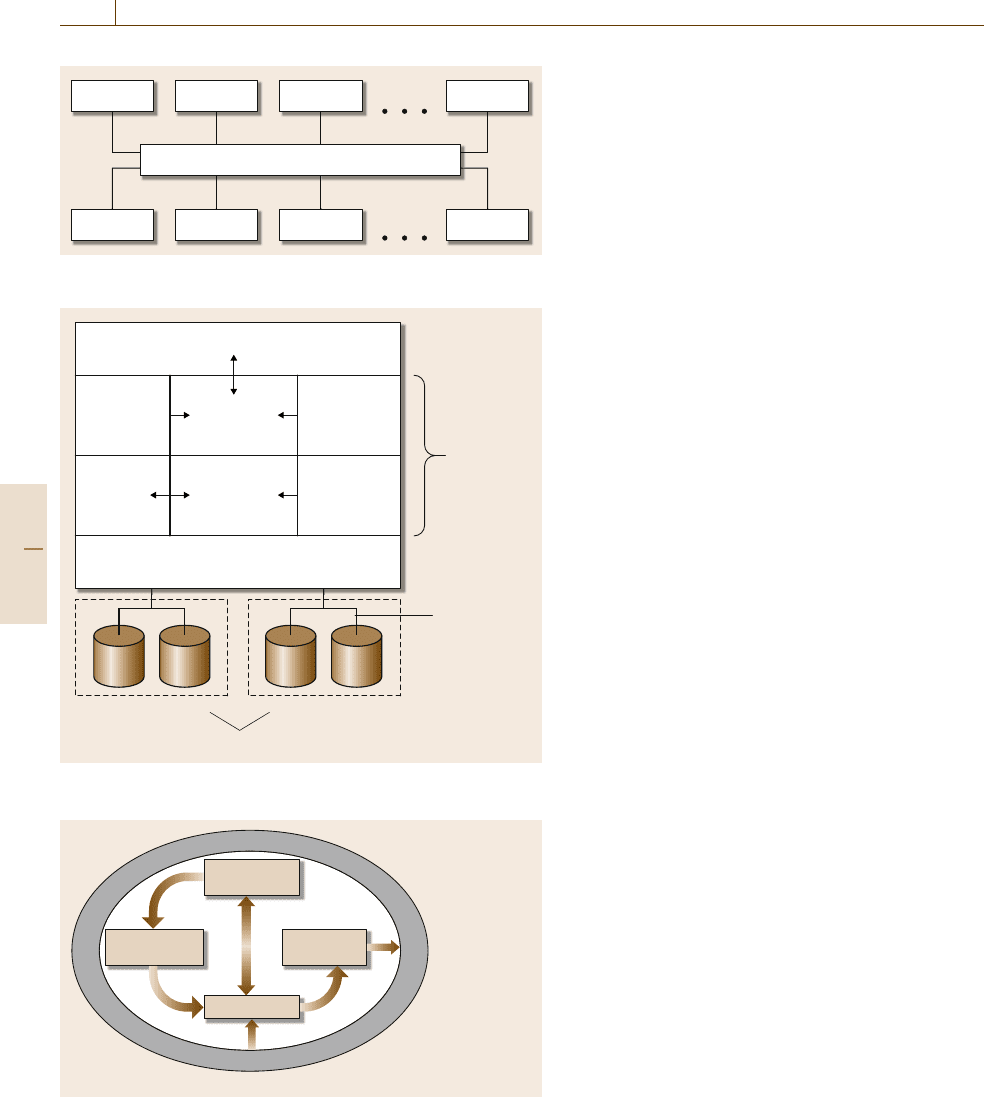
Active middleware is one of the four circles
of the “e-” in e-Work as defined by the PRISM
Center (Production, Robotics, and Integration Soft-
ware for Manufacturing & Management) at Purdue
University [30.77]. Six major components in active
middleware have been identified [30.89, 90]: model-
ing tool, workflows, task/activity database, decision
support system (DSS), multiagent system (MAS), and
collaborative work protocols. Active middleware has
been developed to optimize the performance of in-
teractions in heterogeneous, autonomous, and distrib-
uted (HAD) environments, and is able to provide an
e-Work platform and enables a universal model for
error and conflict prognostics and prevention in a dis-
tributed environment. Figure 30.10 shows the structure
Part C 30.4
514 Part C Automation Design: Theory, Elements, and Methods
Database 2 Database 3 Database nDatabase 1
Server 2 Server 3 Server mServer 1
Middleware
Fig. 30.9 Middleware in a database server system
Distributed enterprises
Enterprises IIEnterprises I
HAD information systems: Engineering
systems, planning decision systems
MAS
User: Human/machine
Workflows
DSS
Cooperative
work
protocols
Task/activity
database
Modeling
tool
Middleware
Distributed
databases
Fig. 30.10 Active middleware architecture (after [30.89])
Error and conflict announcement
CEDP
Receive
Send
CEDP
CEDA
Error
knowledge base
Error detection
Detection policy
generation
Conflict
evaluation
Error and conflict
announcement
Fig. 30.11 Conflict and error detection model (CEDM)
of the active middleware; each component is described
below:
1. Modeling tool: The goal of a modeling tool is to cre-
ate a representation model for a multiagent system.
The model can be transformed to next-level models,
which will be the base of the system implementa-
tion.
2. Workflows: Workflows describe thesequence andre-
lations of tasks in a system. Workflows store the
answer to two questions: (1) Which agent will ben-
efit from the task when it is completed by one or
more given agents? (2) Which task must be finished
before other tasks can begin? The workflows are
specific to the given system, and can be managed
by a workflow management system (WFMS).
3. Task/activity database: This database is used to
record and help allocate tasks. There are many tasks
in a large system such as those applied in auto-
motive industries. Certain tasks are performed by
several agents, and others are performed by one
agent. The database records all task information and
the progress of tasks (activity) and helps allocate
and reallocate tasks if required.
4. Decision support system (DSS): DSS for the ac-
tive middleware is like the operating system for
a computer. In addition, DSS already has programs
running for monitoring, analysis, and optimization.
It can allocate/delete/create tasks, bring in or take
off agents, and change workflows.
5. Multiagent system (MAS): MAS includes all agents
in a system. It stores information about each agent,
for example, capacity and number of agents, func-
tions of an agent, working time, and effective date
and expiry date of the agent.
6. Cooperative work protocols: Cooperative work
protocols define communication and interaction
protocols between components of active middle-
ware. It is noted thatcommunication betweenagents
also includes communication between components
because active middleware includes all agents in
a system.
30.4.2 Conflict and Error Detection Model
A conflict and error detection model (CEDM;
Fig.30.11) that is supported by the conflict and er-
ror detection protocol (CEDP, part of collaborative
Part C 30.4