Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.


315
Automati
Part C
Part C Automation Design:
Theory, Elements, and Methods
19 Mechatronic Systems – A Short Introduction
Rolf Isermann, Darmstadt, Germany
20 Sensors and Sensor Networks
Wootae Jeong, Uiwang, Korea
21 Industrial Intelligent Robots
Yoshiharu Inaba, Yamanashi, Japan
Shinsuke Sakakibara, Yamanashi, Japan
22 Modeling and Software for Automation
Alessandro Pasetti, Tägerwilen, Switzerland
Walter Schaufelberger (Δ), Zurich, Switzerland
23 Real-Time Autonomic Automation
Christian Dannegger, Rottweil, Germany
24 Automation Under Service-Oriented Grids
Jackson He, Hillsboro, USA
Enrique Castro-Leon, Hillsboro, USA
25 Human Factors in Automation Design
John D. Lee, Iowa City, USA
Bobbie D. Seppelt, Iowa City, USA
26 Collaborative Human–Automation Decision
Making
Mary L. Cummings, Cambridge, USA
Sylvain Bruni, Woburn, USA
27 Teleoperation
Luis Basañez, Barcelona, Spain
Raúl Suárez, Barcelona, Spain
28 Distributed Agent Software for Automation
Francisco P. Maturana, Mayfield Heights, USA
Dan L. Carnahan, Mayfield Heights, USA
Kenwood H. Hall, Mayfield Heights, USA
29 Evolutionary Techniques for Automation
Mitsuo Gen, Kitakyushu, Japan
LinLin,Kitakyushu,Japan
30 Automating Errors
and Conflicts Prognostics and Prevention
Xin W. Chen, West Lafayette, USA
Shimon Y. Nof, West Lafayette, USA

316
Automation Design: Theory, Elements, and Methods Part C From theory to building automation machines,
systems, and systems-of-systems this part explains the fundamental elements of mechatronics, sensors, robots,
and other components useful for automation, and how they are combined with control and automation software,
including models and techniques for automation software engineering, and the automation of the design process
itself. Design theories and methods cover also soft automation, automation modeling and programming lan-
guages, real-time and autonomic techniques, and emerging networking and service grids for automation. Human
factors engineering and science in the design of automation, including interaction and interface design, and issues
of trust and collaboration focus on systems and infrastructures integrating people with decision-support and with
teleoperated, remote automatic equipment. Also in this part are advanced design methods and tools of distributed
agents, evolutionary techniques and computing algorithms for automation, and design of eight key automation
functions to prevent or recover from errors and conflicts, to assure automation reliability and sustainability.

317
Mechatronic S
19. Mechatronic Systems – A Short Introduction
Rolf Isermann
Many technical processes and products in the area
of mechanical and electrical engineering show
increasing integration of mechanics with digital
electronics and information processing. This in-
tegration is between the components (hardware)
and the information-driven functions (software),
resulting in integrated systems called mechatronic
systems. Their development involves finding an
optimal balance between the basic mechanical
structure, sensor and actuator implementation,
and automatic information processing and overall
control. Frequently formerly mechanical functions
are replaced by electronically controlled func-
tions, resulting in simpler mechanical structures
and increased functionality. The development of
mechatronic systems opens the door to many in-
novative solutions and synergetic effects which
are not possible with mechanics or electronics
alone. This technical progress has a very strong in-
fluence on a multitude of products in the areas
of mechanical, electrical, and electronic engi-
neering and is increasingly changing the design,
for example, of conventional electromechanical
components, machines, vehicles, and precision
mechanical devices.
19.1 From Mechanical to Mechatronic Systems 317
19.2 Mechanical Systems
and Mechatronic Developments ............. 319
19.2.1 Machine Elements, Mechanical
Components ................................ 319
19.2.2 Electrical Drives and Servo Systems. 319
19.2.3 Power-Generating Machines ......... 320
19.2.4 Power-Consuming Machines ......... 320
19.2.5 Vehicles ...................................... 321
19.2.6 Trains ......................................... 321
19.3 Functions of Mechatronic Systems.......... 321
19.3.1 Basic Mechanical Design ............... 321
19.3.2 Distribution of Mechanical
and Electronic Functions ............... 321
19.3.3 Operating Properties..................... 322
19.3.4 New Functions ............................. 322
19.3.5 Other Developments ..................... 322
19.4 Integration Forms of Processes
with Electronics.................................... 323
19.5 Design Procedures
for Mechatronic Systems........................ 325
19.6 Computer-Aided Design
of Mechatronic Systems......................... 328
19.7 Conclusion and Emerging Trends ........... 329
References .................................................. 329
19.1 From Mechanical to Mechatronic Systems
Mechanical systems generate certain motions or trans-
fer forces or torques. For the oriented command of,
e.g., displacements, velocities or forces, feedforward
and feedback control systems have been applied for
many years. The control systems operate either with-
out auxiliary energy (e.g., a fly-ball governor), or
with electrical, hydraulic or pneumatic auxiliary en-
ergy, to manipulate the commanded variables directly
or with a power amplifier. A realization with added
fixed wired (analog) devices turns out to enable only
relatively simple and limited control functions. If these
analog devices are replaced with digital computers
in the form of, e.g., online coupled microcomput-
ers, the information processing can be designed to
be considerably more flexible and more comprehen-
sive.
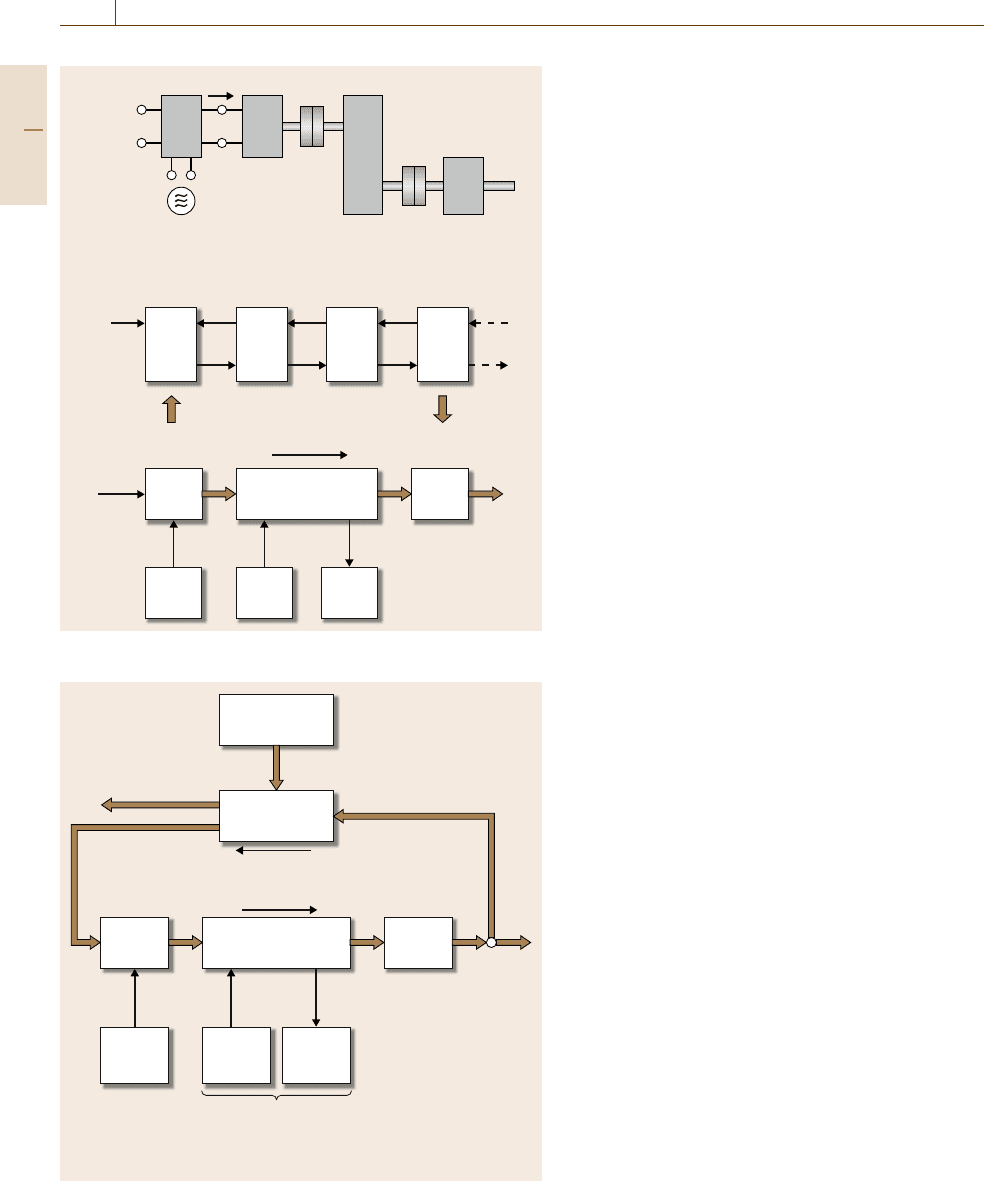
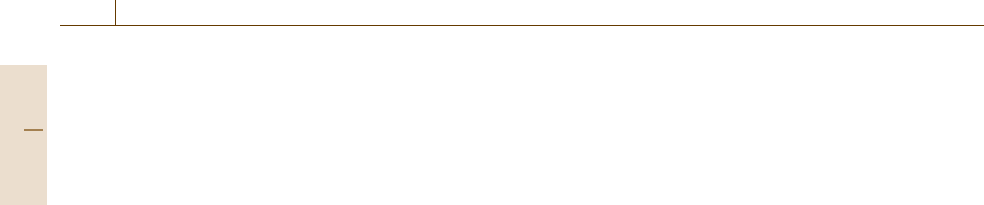
Figure 19.1 shows the example of a machine set,
consisting of a power-generating machine (DC motor)
and a power-consuming machine (circulation pump):
(a) a scheme of the components, (b) the resulting sig-
Part C 19
318 Part C Automation Design: Theory, Elements, and Methods
Manipulated
variables
Measured
variables
Sensors
Actuator
Power
electronics
(actuator)
Power
generating
machine
(DC motor)
Power
consuming
machine
(pump)
Drive
train
(gear
unit)
A
V
V
I
PGM PCMDT
Auxiliary
energy
supply
Energy
supply
Energy
consumer
Primary
energy
flow P
i
Consumer
energy
flow P
o
P
o
P
i
I
A
T
1
T
2
T
3
V
A
ω
1
ω
1
ω
2
ω
2
ω
3
ω
3
Mechanics &
energy converter
Energy flowc)
b)
a)
Energy flow
Information flow
Sensors
Actuators
Auxiliary
energy
supply
Energy
supply
Energy
consumer
Primary
energy
flow
Consumer
energy
flow
Mechanics &
energy converter
Reference
variables
Monitored
variables
Manipulated
variables
Measured
variables
Information
processing
Man/machine
interface
Mechanical,
hydraulic,
thermal,
electrical
Fig. 19.1a–c Schematic representation of a machine set:
(a) scheme of the components; (b) signal flow diagram
(two-port representation);
(c) open-loop process. V – volt-
age; V
A
– armature voltage; I
A
– armature current; T –
torque; ω – angular frequency; P
i
– drive power; P
o
–
consumer power
nal flow diagram in two-port representation, and (c)
the open-loop process with one or several manipulated
variables as input variables and several measured vari-
ables as output variables. This process is characterized
by different controllable energy flows (electrical, me-
chanical, and hydraulic). The first and last flow can be
manipulated by a manipulated variable of low power
(auxiliary power), e.g., through a power electronics de-
vice and a flow valve actuator. Several sensors yield
measurable variables. For a mechanical–electronic sys-
tem, a digital electronic system is added to the process.
This electronic system acts on the process based on the
measurements or external command variables in a feed-
forward or feedback manner (Fig.19.2). If then the
electronic and the mechanical system are merged to an
autonomous overall system, an integrated mechanical–
electronic system results. The electronics processes
information, and such a system is characterized at least
by a mechanical energy flow and an information flow.
These integrated mechanical–electronic systems
are increasingly called mechatronic systems. Thus,
mechanics and electronics are joined. The word mecha-
tronics was probably first created by a Japanese engi-
neer in 1969 [19.1] and had a trademark by a Japanese
company until 1972 [19.2]. Several definitions can be
found in [19.3–7]. All definitions agree that mechatron-
ics is an interdisciplinary field, in which the following
disciplines act together (Fig.19.3):
•
Mechanical systems (mechanical elements, ma-
chines, precision mechanics)
•
Electronic systems (microelectronics, power elec-
tronics, sensor and actuator technology)
•
Information technology (systems theory, control
and automation, software engineering, artificial in-
telligence).
The solution of tasks to design mechatronic sys-
tems is performed on the mechanical as well as on
the digital-electronic side. Thus, interrelations during
design play an important role; because the mechan-
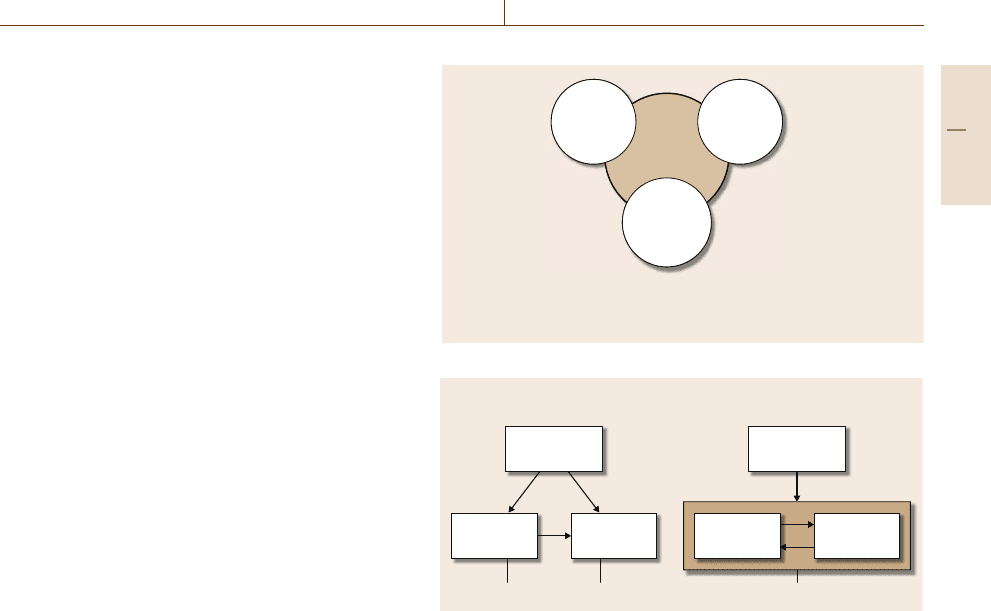
Fig. 19.2 Mechanical process and information processing
develop towards a mechatronic system
Part C 19.1
Mechatronic Systems – A Short Introduction 19.2 Mechanical Systems and Mechatronic Developments 319
Fig. 19.3 Mechatronics: synergetic integration of different
disciplines
ical system influences the electronic system, and
vice versa, the electronic system influences the de-
sign of the mechanical system (Fig.19.4). This means
that simultaneous engineering has to take place, with
the goal of designing an overall integrated sys-
tem (an organic system) and also creating synergetic
effects.
A further feature of mechatronic systems is in-
tegrated digital information processing. As well as
basic control functions, more sophisticated control
functions may be realized, e.g., calculation of nonmea-
surable variables, adaptation of controller parameters,
detection and diagnosis of faults and, in the case of fail-
ures, reconfiguration to redundant components. Hence,
mechatronic systems are developing with adaptive or
even learning behavior, which can also be called intelli-
gent mechatronic systems.
The developments to date can be found in [19.2,
7–11]. An insight into general aspects are given ed-
itorially in journals [19.5, 6], conference proceedings
such as [19.12–17], journal articles by [19.18–21], and
books [19.22–27]. A summary of research projects at
the Darmstadt University of Technology can be found
in [19.28].
Electronics
Information
technology
System theory
Modeling
Automation-technology
Sofware
Artificial intelligence
Mechanical elements
Machines
Precision mechanics
Electrical elements
Micro electronics
Power electronics
Sensors
Actuators
Mecha-
tronics
Mechanics
&
electro-
mechanics
Design
construction
Separate components
Conventional procedure
a) Mechatronic procedureb)
Mechan.
system
Electronics
Design
construction
Mechatronic overall system
Mechan.
system
Electron.
system
Fig. 19.4a,b Interrelations during the design and construction of
mechatronic systems
19.2 Mechanical Systems and Mechatronic Developments
Mechanical systems can be applied to a large area
of mechanical engineering. According to their con-
struction, they can be subdivided into mechanical
components, machines, vehicles, precision mechanical
devices, and micromechanical components.
The design of mechanical products is influenced by
the interplay of energy, matter, and information. With
regard to the basic problem and its solution, frequently
either the energy, matter or information flow is dom-
inant. Therefore, one main flow and at least one side
flow can be distinguished [19.29].
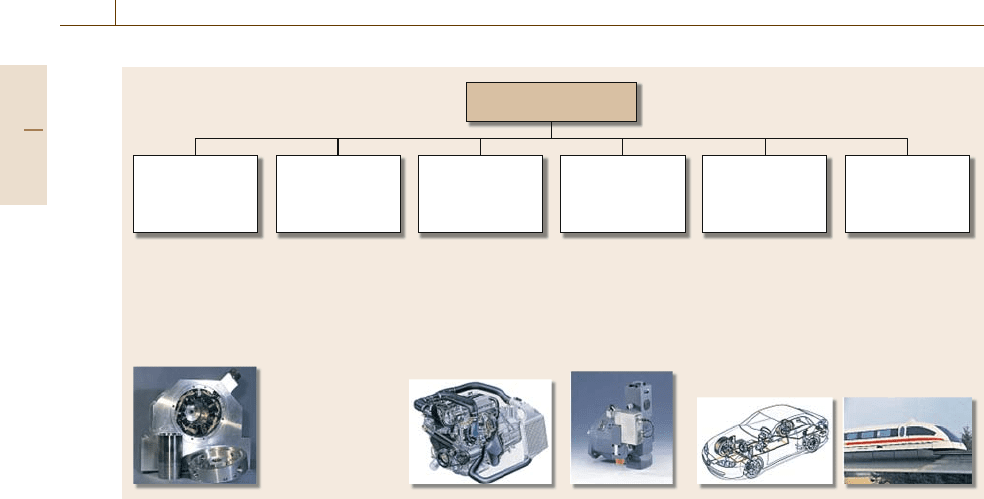
In the following some examples of mechatronic
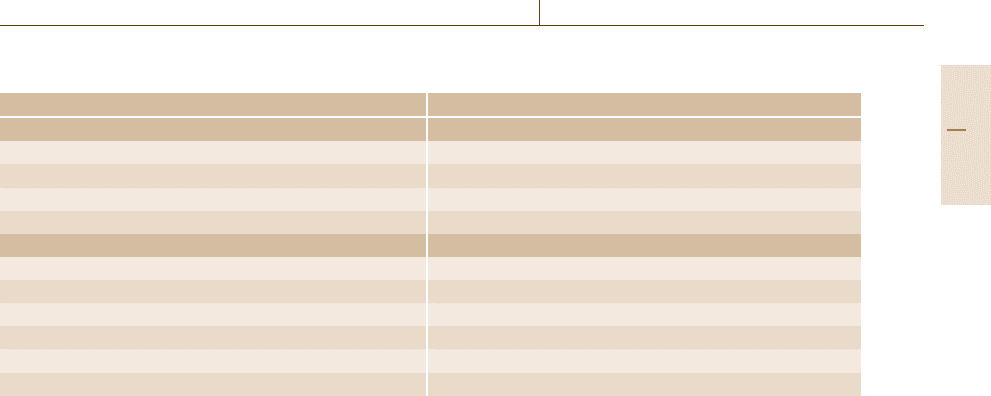
developments are given. The area of mechanical com-
ponents, machines, and vehicles is covered by Fig.19.5.
19.2.1 Machine Elements, Mechanical
Components
Machine elements are usually purely mechanical. Fig-
ure 19.5 shows some examples. Properties that can be
improved by electronics are, for example, self-adaptive
stiffness and damping, self-adaptive free motion or
pretension, automatic operating functions such as cou-
pling or gear shifting, and supervisory functions.
Some examples of mechatronic approaches are hy-
drobearings for combustion engines with electronic
control of damping, magnetic bearings with posi-
tion control [19.30], automatic electronic–hydraulic
gears [19.31], and adaptive shock absorbers for wheel
suspensions [19.32].
19.2.2 Electrical Drives and Servo Systems
Electrical drives with direct-current, universal, asyn-
chronous, and synchronous motors have used inte-
gration with gears, speed sensors or position sensors
and power electronics for many years. Especially the
development of transistor-based voltage supplies and
cheaper power electronics on the basis of transistors
and thyristors with variable-frequency three-phase cur-
Part C 19.2
320 Part C Automation Design: Theory, Elements, and Methods
Mechatronic systems
Mechatronic
machine
components
• Semi-active
hydraulic
dampers
• Automatic gears
• Magnetic
bearings
Mechatronic
motion
generators
• Integrated
electrical
servo drives
• Integrated
hydraulic
servo drives
• Integrated
pneumatic
servo drives
• Robots
(multi-axis,
mobile)
Mechatronic
power
producing
machines
• Brushless DC
motor
• Integrated AC
drives
• Mechatronic
combustion
engines
Mechatronic
power
consuming
machines
• Integrated
multi-axis
machine tools
• Integrated
hydraulic
pumps
Mechatronic
automobiles
• Anti-lock braking
systems (ABS)
• Electro hydraulic
break (EHB)
• Active suspension
• Active front
steering
Mechatronic
trains
• Tilting trains
• Active boogie
• Magnetic
levitated trains
(MAGLEV)
Fig. 19.5 Examples of mechatronic systems
rent supported speed control drives also for smaller
power. Herewith, a trend towards decentralized drives
with integrated electronics can be observed. The way
of integration or attachment depends, e.g., on space
requirement, cooling, contamination, vibrations, and
accessibility for maintenance. Electrical servo drives re-
quire special designs for positioning.
Hydraulic and pneumatic servo drives for linear
and rotatory positioning show increasingly integrated
sensors and control electronics. Motivationsare require-
ments for easy-to-assemble drives, small space, fast
change, and increased functions [19.33].
Multiaxis robots and mobile robots show mecha-
tronic properties from the beginning of their design.
19.2.3 Power-Generating Machines
Machines show an especially broad variability. Power-
producing machinesare characterized by the conversion
of hydraulic, thermodynamic or electrical energy and
delivery of power. Power-consuming machines convert
mechanical energy to another form, thereby absorbing
energy. Vehicles transfer mechanical energy into move-
ment, thereby consuming power.
Examples of mechatronic electrical power-genera-
ting machines are brushless DC motors with electronic
commutation or speed-controlled asynchronous and
synchronous motors with variable-frequency power
converters.
Combustion engines increasingly contain mecha-
tronic components, especially in the area of actuators.
Gasoline engines showed, for example, the following
steps of development: microelectronic-controlled injec-
tion and ignition(1979), electricalthrottle (1991), direct
injection with electromechanical (1999) and piezo-
electric injection valves (2003), variable valve control
(2004); see, for example, [19.34].
Diesel engines first had mechanical injection pumps
(1927), then analog-electronic-controlled axial pis-
ton pumps (1986), and digital-electronic-controlled
high-pressure pumps, since 1997 with common-rail sys-
tems [19.35]. Further developments are the exhaust
turbochargers with wastegate or controllable vanes
(variable turbine geometry, VTG), since about 1993.
19.2.4 Power-Consuming Machines
Examples of mechatronic power-consuming machines
are multiaxis machine tools with trajectory control,
force control, tools with integrated sensors, and robot
transport of the products; see, e.g., [19.36]. In ad-
dition to these machine tools with open kinematic
chains between basic frame and tools and linear
or rotatory axes with one degree of freedom, ma-
chines with parallel kinematics will be developed.
Machine tools show a tendency towards magnetic
bearings if ball bearings cannot be applied for high
speeds, e.g., for high-speed milling of aluminum, and
Part C 19.2
Mechatronic Systems – A Short Introduction 19.3 Functions of Mechatronic Systems 321
also for ultracentrifuges [19.37]. Within the area of
manufacturing, many machinery, sorting, and trans-
portation devices are characterized by integration
with electronics, but as yet they are mostly not
fully hardware-integrated. For hydraulic piston pumps
the control electronics is now attached to the cas-
ing [19.33]. Further examples are packing machines
with decentralized drives and trajectory control or
offset-printing machines with replacement of the me-
chanical synchronization axis through decentralized
drives with digital electronic synchronization and high
precision.
19.2.5 Vehicles
Many mechatronic components have been introduced,
especially in the area of vehicles, or are in development:
antilock braking control (ABS) [19.38], controllable
shock absorbers [19.39], controlled adaptive suspen-
sions [19.40], active suspensions [19.41, 42], drive
dynamic control through individual braking (electronic
stability program, ESP) [19.43, 44], electrohydraulic
brakes (2001), and active front steering (AFS) (2003).
Of the innovations for vehicles 80–90% are based on
electronic/mechatronic developments. Here, the value
of electronics/electrics of vehicles increases to about
30% or more.
19.2.6 Trains
Trains with steam, diesel or electrical locomotives have
followed a very long development. For wagons the de-
sign with two boogies with two axes are standard. ABS
braking control can be seen as the first mechatronic in-
fluence in this area [19.45, 46]. The high-speed trains
(TGV, ICE) contain modern asynchronous motors with
power electronic control. The trolleys are supplied with
electronic forceand position control. Tilting trains show
a mechatronic design (1997) and actively damped and
steerable boogies also [19.47]. Further, magnetically
levitated trains are based on mechatronic construction;
see, e.g., [19.47].
19.3 Functions of Mechatronic Systems
Mechatronic systems enable, after the integration of the
components, many improved and also new functions.
This will be discussed by using examples.
19.3.1 Basic Mechanical Design
The basic mechanical construction firsthas tosatisfy the
task of transferring the mechanical energy flow (force,
torque) to generate motions or special movements, etc.
Knowntraditional methods are applied, such as material
selection, calculation of strengths, manufacturing, pro-
duction costs, etc. By attaching sensors, actuators, and
mechanical controllers, in earlier times, simple control
functions were realized, e.g., the fly-ball governor. Then
gradually pneumatic, hydraulic, and electrical analog
controllers were introduced. After the advent of digital
control systems, especially with the development of mi-
croprocessors around 1975, the information processing
part could be designed to be much more sophisticated.
These digitally controlled systems were first added to
the basic mechanical construction and were limited
by the properties of the sensors, actuators, and elec-
tronics, i.e., they frequently did not satisfy reliability
and lifetime requirements under rough environmen-
tal conditions (temperature, vibrations, contamination)
and had a relatively large space requirement and cable
connections, and low computational speed. However,
many of these initial drawbacks were removed with
time, and since about 1980 electronic hardware has be-
come greatly miniaturized, robust, and powerful, and
has been connected by field bus systems. Based on this,
the emphasis on the electronic side could be increased
and the mechanical construction could be designed as
a mechanical–electronic system from the very begin-
ning. The aim was to result in more autonomy, for
example, by decentralized control, field bus connec-
tions, plug-and-play approaches, and distributed energy
supply, such that self-contained units emerge.
19.3.2 Distribution of Mechanical
and Electronic Functions
In the design of mechatronic systems, interplay for the
realization of functions in the mechanical and elec-
tronic parts is crucial. Compared with pure mechanical
realizations, the use of amplifiers and actuators with
electrical auxiliary energy has already led to con-
siderable simplifications, as can be seen in watches,
electronic typewriters, and cameras. A further consid-
erable simplification in the mechanics resulted from
Part C 19.3
322 Part C Automation Design: Theory, Elements, and Methods
the introduction of microcomputers in connection with
decentralized electrical drives, e.g., for electronic type-
writers, sewing machines, multiaxis handling systems,
and automatic gears.
The design of lightweight constructions leads to
elastic systems that are weakly damped through the
material itself. Electronic damping through position,
speed or vibration sensors and electronic feedback
can be realized with the additional advantage of ad-
justable damping through algorithms. Examples are
elastic drive trains of vehicles with damping algorithms
in the engine electronics, elastic robots, hydraulic sys-
tems, far-reaching cranes, and space constructions (e.g.,
with flywheels).
The addition of closed-loop control, e.g., for po-
sition, speed or force, does not only result in precise
tracking of reference variables, but also an approxi-
mate linear overall behavior, even though mechanical
systems may show nonlinear behavior. By omitting the
constraint of linearization on the mechanical side, the
effort for construction and manufacturing may be re-
duced. Examples are simple mechanical pneumatic and
electromechanical actuators and flow valves with elec-
tronic control.
With the aid of freely programmable reference
variable generation, the adaptation of nonlinear me-
chanical systems to the operator can be improved.
This is already used for driving-pedal characteristics
within engine electronics for automobiles, telemanipu-
lation of vehicles and aircraft, and in the development
of hydraulically actuated excavators and electric power
steering.
However, with increasing number of sensors, ac-
tuators, switches, and control units, the cables and
electrical connections also increase, such that reliabil-
ity, cost, weight, and required space are major concerns.
Therefore, the development of suitable bus systems,
plug systems, andfault-tolerant and reconfigurableelec-
tronic systems are challenges for the designer.
19.3.3 Operating Properties
By applying active feedback control, the precision of,
e.g., a position is reached by comparison of a pro-
grammed reference variable with a measured control
variable and not only through the high mechanical pre-
cision ofa passivelyfeedforward-controlled mechanical
element. Therefore, the mechanical precision in design
and manufacturing may be reduced somewhat and sim-
pler constructions for bearings orslidewayscan be used.
An important aspect in this regard is compensation
of larger and time-variant friction by adaptive friction
compensation. Larger friction at the cost of backlash
may also be intended (e.g., gears with pretension), be-
cause it is usually easier to compensate for friction
than for backlash. Model-based and adaptive control
allow operation at more operating points (wide-range
operation) compared with fixed control with unsatis-
factory performance (danger of instability or sluggish
behavior). A combination of robust and adaptive con-
trol enables wide-range operation, e.g., for flow, force,
and speed control, and for processes involving engines,
vehicles, and aircraft. Better control performance al-
lows the reference variables to be moved closer to
constraints with improved efficiencies and yields (e.g.,
higher temperatures, pressures for combustion engines
and turbines, compressors at stalling limits, and higher
tensions and higher speed for paper machines and steel
mills).
19.3.4 New Functions
Mechatronic systems also enable functions that could
not be performed without digital electronics. Firstly,
nonmeasurable quantities can be calculated on the
basis of measured signals and influenced by feedfor-
ward or feedback control. Examples are time-dependent
variables such as the slip for tires, internal tensions,
temperatures, the slip angle and ground speed for steer-
ing control of vehicles or parameters such as damping
and stiffness coefficients, and resistances. The auto-
matic adaptation of parameters, such as damping and
stiffness for oscillating systems based on measurements
of displacements or accelerations, is another example.
Integrated supervision and fault diagnosis becomes in-
creasingly important with more automatic functions,
increasing complexity, and higher demands on relia-
bility and safety. Then, fault tolerance by triggering
of redundant components and system reconfiguration,
maintenance on request, and any kind of teleservice
makes the system more intelligent.
19.3.5 Other Developments
Mechatronic systems frequently allow flexible adapta-
tion to boundary conditions. A part of the functions
and also precision becomes programmable and rapidly
changeable. Advanced simulations enable the reduction
of experimental investigations with many parameter
variations. Also, shorter time to market is possible if
the basic elements are developed in parallel and the
functional integration results from the software.
Part C 19.3
Mechatronic Systems – A Short Introduction 19.4 Integration Forms of Processes with Electronics 323
Table 19.1 Some properties of conventional and mechatronic designed systems
Conventional design Mechatronic design
Added components Integration of components (hardware)
Bulky Compact
Complex Simple mechanisms
Cable problems Bus or wireless communication
Connected components Autonomous units
Simple control Integration by information processing (software)
Stiff construction Elastic construction with damping by electronic feedback
Feedforward control, linear (analog) control Programmable feedback (nonlinear) digital control
Precision through narrow tolerances Precision through measurement and feedback control
Nonmeasurable quantities change arbitrarily Control of nonmeasurable estimated quantities
Simple monitoring Supervision with fault diagnosis
Fixed abilities Adaptive and learning abilities
A far-reaching integration of the process and the
electronics is much easier if the customer obtains the
functioning system from one manufacturer. Usually,
this is the manufacturer of the machine, the device or
the apparatus. Although these manufacturers have to in-
vest a lot of effort in coping with the electronics and
the information processing, they gain the chance to add
to the value of the product. For small devices and ma-
chines with large production numbers, this is obvious.
In the case of larger machines and apparatus, the pro-
cess and its automation frequently comes from different
manufacturers. Then, special effort isneeded to produce
integrated solutions.
Table 19.1 summarizes some properties of mecha-
tronic systems compared with conventional electrome-
chanical systems.
19.4 Integration Forms of Processes with Electronics
Figure 19.6a shows a general scheme of a classical
mechanical–electronic system. Such systems resulted
from adding available sensors and actuators and ana-
log or digital controllers to the mechanical components.
The limits of this approach were the lack of suit-
able sensors and actuators, unsatisfactory lifetime under
rough operating conditions (acceleration, temperature,
and contamination), large space requirements, the re-
quired cables, and relatively slow data processing.
With increasing improvements in the miniaturization,
robustness, and computing power of microelectronic
components, one can now try to place more emphasis on
the electronic side and design the mechanical part from
the beginning with a view to a mechatronic overall sys-
tem. Then, more autonomous systems can be envisaged,
e.g., in the form of encapsulated units with noncon-
tacting signal transfer or bus connections and robust
microelectronics.
Integration within a mechatronic system can be per-
formed mainly in two ways: through the integration
of components and through integration by information
processing (see also Table 19.1).
The integration of components (hardware integra-
tion) results from designing the mechatronic system as
an overall system and embedding the sensors, actua-
tors, and microcomputers into the mechanical process
(Fig.19.6b). This spatial integration may be limited to
the process and sensor or the process and actuator.
The microcomputers can be integrated with the actu-
ator, the process or sensor, or be arranged at several
places. Integrated sensors and microcomputers lead to
smart sensors, and integrated actuators and microcom-
puters develop into smart actuators. For larger systems,
bus connections will replace the many cables. Hence,
there are several possibilities for building an integrated
overall system by proper integration of the hardware.
Integration by information processing (software
integration) is mostly based on advanced control func-
tions. Besides basic feedforward and feedback control,
an additional influence may take place through pro-
cess knowledge and corresponding online information
processing (Fig.19.6c). This means processing of avail-
able signals at higher levels, as will be discussed in
the next Section. This includes the solution of tasks
Part C 19.4
324 Part C Automation Design: Theory, Elements, and Methods
Micro-
computer
a)
b)
Actuators Process Sensors
Micro-
computer
Actuators Process Sensors
Possible points of integration
c)
Micro-
computer
Actuators Process Sensors
Process
knowledge
Hardware
Software
Information
processing
Fig. 19.6a–c Integration of mechatronic systems: (a) general
scheme of a (classical) mechanical–electronic system;
(b) inte-
gration through components (hardware integration);
(c) integration
through functions (software integration)
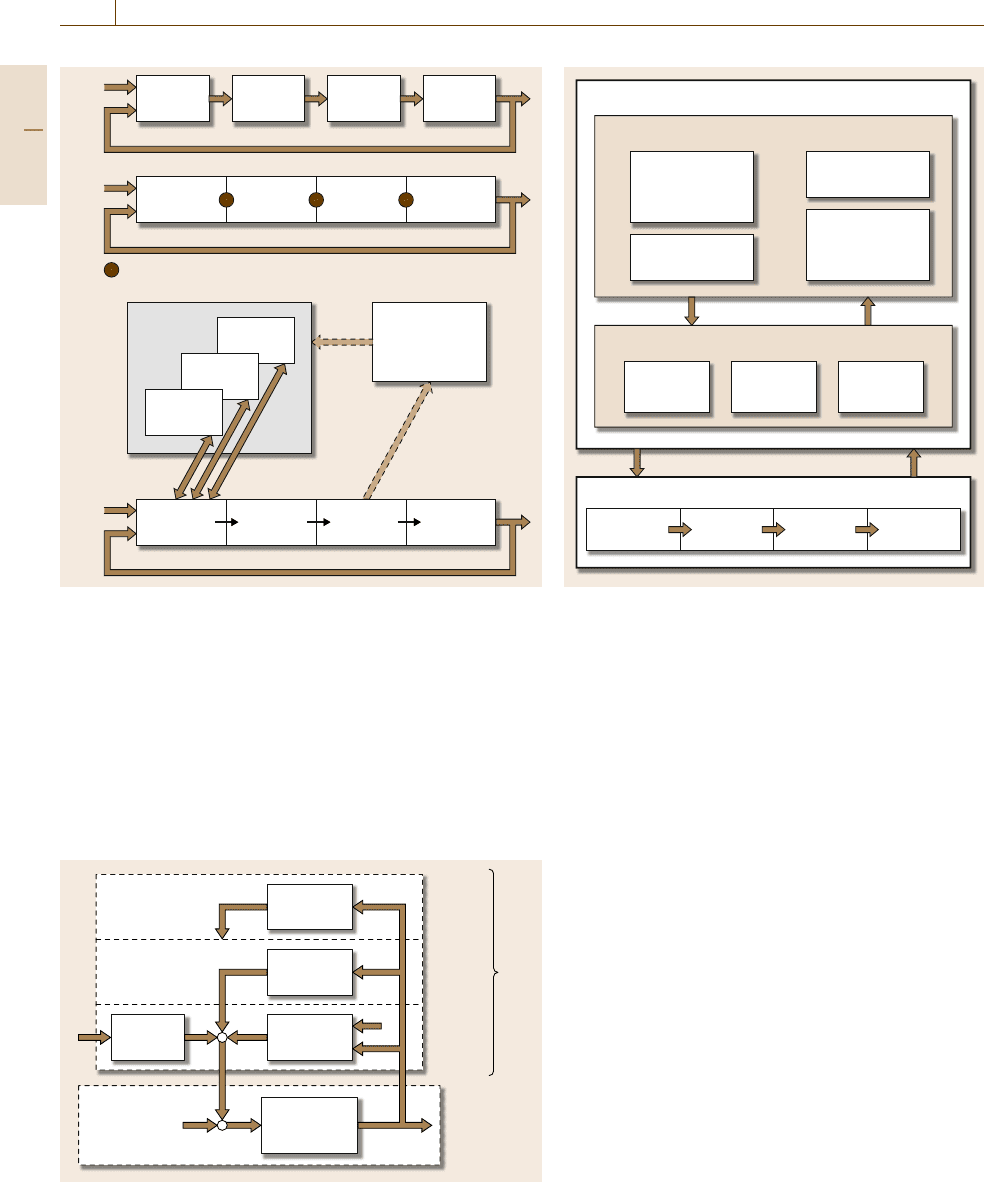
such as supervision with fault diagnosis, optimization,
and general process management. The corresponding
problem solutions result in online information process-
ing, especially using real-time algorithms, which must
be adapted to the properties of the mechanical pro-
cess, e.g., expressed by mathematical models in the
Control
feedback
Super-
vision
Information processing
Process
Manage-
ment
Higher
levels
Super-
vision
level
Control
level
Process-
level
Feedforw.
control
v
uy
r
Methematical
process models
Information
gaining
• Identification
• State observer
Performance
criteria
Design methods
• Control
• Supervision
• Optimization
Feedword,
feedback
control
Supervision
diagnosis
Adaptation
optimization
Integration of components
Integration by information processing
Online information processing
Knowledge base
Micro-
computer
Actuator Process Sensors
Fig. 19.7 Integration of mechatronic systems: integration
of components (hardware integration); integration by in-
formation processing (software integration)
form of static characteristics, differential equations, etc.
(Fig.19.7). Therefore, a knowledge base is required,
comprising methods for design and information gain,
process models, and performance criteria. In this way,
the mechanical parts are governed in various ways
through higher-level information processing with in-
telligent properties, possibly including learning, thus
resulting in integration with process-adapted software.
Both types of integration are summarized in Fig. 19.7.
In the following, mainly integration through informa-
tion processing will be considered.
Recent approaches for mechatronic systems mostly
use signal processing at lower levels, e.g., damp-
ing or control of motions or simple supervision.
Digital information processing, however, allows the
solutions of many more tasks, such as adaptive con-
trol, learning control, supervision with fault diagnosis,
decisions for maintenance or even fault-tolerance ac-
tions, economic optimization, and coordination. These
Fig. 19.8 Different levels of information processing for
process automation. u: manipulated variables; y: measured
variables; v: input variables; r: reference variables
Part C 19.4