Nof S.Y. Springer Handbook of Automation
Подождите немного. Документ загружается.


Automation of Mobility and Navigation 16.4 Navigation Control and Interaction with the Environment 285
tivariable nonlinear system with strong coupling in
some control loops. Autonomous helicopter control has
been a classical control benchmark and many model-
based control techniques have been applied, including
multi-PID controllers, robust control, predictive con-
trol, and nonlinear control. The significance of each of
these methods for practical implementations is still an
open question. Safe landing on mobile platforms and
transportation of loads by means of several UAVs over-
coming the payload limitation of individual UAVs are
open challenges. Very recently the joint transportation
of a load by several helicopters has been demonstrated
in the AWARE (acronym of the project platform for
autonomous self-deploying and operation of wireless
sensor-actuator networks cooperating with aerial ob-
jects) project [16.28].
There are also approaches in which learning from
skilled human pilots or teleoperators plays the most sig-
nificant role. In these approaches, fuzzy logic [16.29],
neural networks [16.30], neurofuzzy techniques, and
other artificial intelligence (AI) techniques are ap-
plied. Control theory and AI techniques have also
been combined. Thus, for example, Takagi–Sugeno
fuzzy systems have been applied to learn from hu-
man drivers by generating closed-loop control systems
that can be analyzed and tuned by means of stabil-
ity theory. These methods have been applied to drive
autonomously trucks (Fig. 16.9) and heavy machines
at high speed [16.31] by estimating the position of
the vehicle by means of the fusion of GPS and dead-
reckoning with simple vehicle models. The system has
Fig. 16.9 Autonomous 16 t Scania truck
been applied to test the tires of vehicles navigating au-
tonomously in testing tracks.
The general challenges are the analysis and design
of reliable controltechniques that couldbe implemented
in real time at high frequency in the onboardprocessors,
providing reactivity to perturbations while maintaining
acceptable performance. This is particularly challeng-
ing when considering small or very small vehicles, such
as micro-UAVs with important limitations in onboard
processing. The application of micro-electromechanical
systems (MEMS) to implement these control systems
is an emerging technology trend. The practical appli-
cation in real time of fault-detection techniques and
fault-tolerant control systems to improve reliability is
another emerging trend.
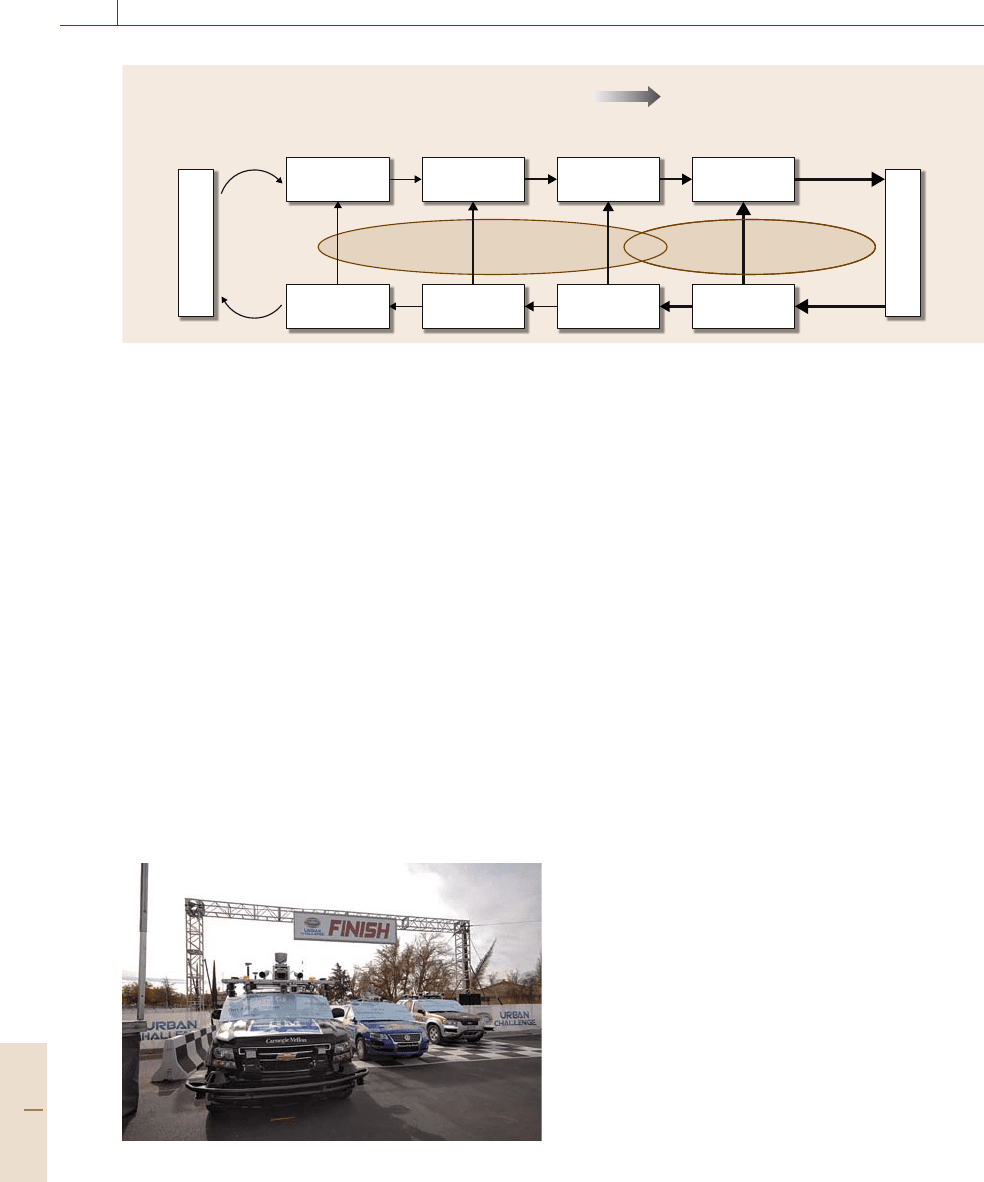
16.4 Navigation Control and Interaction with the Environment
The consideration of interactions with the environment
is also an important problem in mobility and navigation
automation. These interactions can also be represented
by means of loops closed at different frequencies, as
showninFig.16.10. The vehicle control described in
the above paragraphs is also embedded in this fig-
ure. Reactivity dominates the higher-frequency loops,
which also require higher bandwidth in communication
channels (inner loops, towards the right in the figure),
while deliberation is the main component of the lower-
frequency loops, which typically have lower bandwidth
requirements in communication channels (outer loops,
towards the left in the figure). The inner loops can be
considered as the lower lever in the control hierarchy,
while the outer loops are the higher levels in this hier-
archy. This chapter will not provide details on mobile
robot control architectures, but will merely describe the
main interactions.
Environment perception is based on the use of
sensors such as cameras, radars, lasers, ultrasonic,
and other range sensors. Thus, cameras and radars
have been applied extensively for the guidance of au-
tonomous cars. The processing of the images leads
to the computation of relevant environment features
that can be used to guide the vehicle by means of
visual servoing techniques (image-based visual servo-
ing). Alternatively, the features can be used to compute
the position/orientation of the vehicle and then apply
position-based visual servoing. The stability of the vi-
sual control loop in the guidance of vehicles has been
studied by several authors (see, for example, [16.32]).
The main drawbacks of these methods are robustness to
Part B 16.4
286 Part B Automation Theory and Scientific Foundations
Task
generation
Mission Complexity Simplicity, analysis
ReactivityDeliberation
Increasing bandwidth
Increasing frequency
Cognitive
models
Path
generation
Geometric
models
Trajectory
generation
Distance
position
Vehicle
control
Features
extraction
O
p
e
r
a
t
o
r
V
e
h
i
c
l
e
Fig. 16.10 Vehicle control and decision loops. The width of the arrows indicates the frequency of the loops and re-
quired bandwidth in communication. The inner loops (right in the figure) correspond to higher-frequency loops with
higher bandwidth requirements, while the outer loops (left in the figure) correspond to lower-frequency loops with lower
bandwidth requirements
illumination changes and real-time constraints. Laser-
based environment perception techniques are also used
in navigation [16.33], as shown by the 2005 DARPA
Grand Challenge (DGC) [16.34]. However, even laser
measurements have some drawbacks in outdoor envi-
ronments; for example, dust clouds could be treated as
transient obstacles or weeds and large rocks cannot be
differentiated.
Compensation for suchdifferentenvironmentalcon-
ditions plays an important role. The use of several
sensors and the application of sensor data-fusion meth-
ods significantly improve robustness against changes in
these conditions. Thus, for example, most autonomous
vehicles in the DGC (see Fig.16.11 for the 2007 Urban
Grand Challenge)applied sensordata-fusion techniques
for autonomous navigation. In some cases environment
perception can substitute or complement GPS position-
Fig. 16.11 Winners of the Urban Grand Challenge, Novem-
ber 2007 [16.35]
ing, overcoming problems related to the visibility of
satellites and degradation of the GPS signal.
The above-mentionedtechniques to computethe po-
sition of the vehicle with respect to the environment
can also be applied to generate trajectories in these
environments. Trajectory generation methods can even-
tually consider the kinematics and dynamic constraints
of the vehicles in order to obtain trajectories that can
be realistically executed with the vehicle control sys-
tem described in the previous section. The relevance
of these techniques depends on the characteristics of
the vehicles. Thus, for example, they are very rele-
vant in the navigation of ground wheeled vehicles with
conventional car-like locomotion systems or in fixed-
wing airplanes, but could be ignored in omnidirectional
ground vehicles navigating at low speeds.
The computation of distances and positions of
the vehicle with respect to the environment can also
be used to obtain geometric models of the environ-
ment. Particularly mapping techniques can be applied.
Moreover, many probabilistic simultaneous localization
and mapping techniques (SLAM)havebeenpro-
posed and successfully applied in robotics in the last
decade [16.36]. Most implementations have been car-
ried out by using lasers in two-dimensional (2-D)
environments. However, the methods for the application
of SLAM in 3-D environments are also promising.
The results of vehicle position and environment
mapping can be used for the planning of vehicle mo-
tion. The planning problem consists of the computation
of a path for the vehicle from a starting configuration
(position/orientation) to a goal position/orientation con-
figuration, avoiding obstacles and minimizing a cost
Part B 16.4
Automation of Mobility and Navigation 16.4 Navigation Control and Interaction with the Environment 287
index usually related to the length of the path [16.37].
Today, many different techniques for automatic path
planning can be applied. In the basic problem a geomet-
ric model of the vehicle is assumed and the model of the
environment is assumed to be completely known (map
known) and static, without other vehicles and mov-
ing obstacles. Many path planning methods are solved
in the configuration space C, defined by the config-
uration variables q ∈
R
n
that completely specify the
position and orientation of the vehicle. Then, given
q
start
, q
goal
∈C, the problem is to find a sequence of
configurations in the obstacle-free configuration space
q
i
∈C
free
connecting q
start
and q
goal
.
The problem can be solved by searching in the
discretized space. Well-known methods are visibility
graphs and Voronoi diagrams. In these methods the
connectivity of the free space is represented by means
of a network of one-dimensional (1-D) curves. These
methods have been extensively applied in 2-D en-
vironments. The consideration of 3-D models adds
significant complexity for execution in real time. An-
other well-known strategy consists of searching in an
adjacency graph of the free-space cells, obtained by dis-
cretization of the environment model into occupancy
cells. These methods need the implementation of graph
searching algorithms, such as A*, to find a solution
and they are usually quite time consuming. The appli-
cation of multiresolution techniques greatly improves
the computational efficiency of these methods. On the
other hand, in recent years, randomized methods and
particularly so-called rapidly exploring random trees
(RRT) [16.38],have been used to explore the free space,
obtaining good results. This method makes it possible
to explore high-dimensional configuration spaces, and
even to include different constraints. Several of these
techniques have been applied and extensively tested in
the DGC 2005 competition.
There are also methods based on the optimization
of potential functions attracting the vehicle to the goal
(global minimum) by considering at the same time the
effect of repulsive forces exerted by the obstacles. The
obvious difficulty of these latter methods, initially pro-
posed for real-time local collision avoidance [16.39],
is the existence of local minima. The potential-based
methods have also been applied for motion planning,
eventually combined with other planning methods such
as the space-cell decomposition mentioned above. Dif-
ferent potential functions have been proposed to avoid
the local minima problem in these methods [16.40].
The extensions of the basic motion planning prob-
lem described above include the consideration of the
nonholonomic and dynamic constraints of the vehi-
cle [16.41]. Other extensions include the uncertainties
in the models of the vehicle and the environment, as
well as the motion of other vehicles and obstacles in the
environment.
The stability of reactive navigation is studied
in [16.42], where Lyapunov techniques, input/output
stability (conicity criterion), and frequency response
methods are applied to study the stability of the nav-
igation of an autonomous ground vehicle by using
ultrasonic sensors. The stability is related to the param-
eters of the reactive navigation such as the sensor range
and the velocity. The influence of the time delay, due
to communication and computation, on the stability of
the reactive navigation is also considered. The analy-
sis is based on the definition of the perception function
p =ψ(d,θ), where d and θ are, respectively, the dis-
tance and angle at which an obstacle is detected. The
values of p are provided to the closed-loop controller.
Then, the feedback controller u =ϕ(p)isappliedtothe
vehicle with model given by (16.1).
Planning under uncertaintyhas been a researchtopic
for many years. In the classical planning methods the
world is assumed to be deterministic, and the state ob-
servable. The uncertainty can be taken into account
by considering stochastic Markov decision processes
(MDPs) with observable states, which leads to stochas-
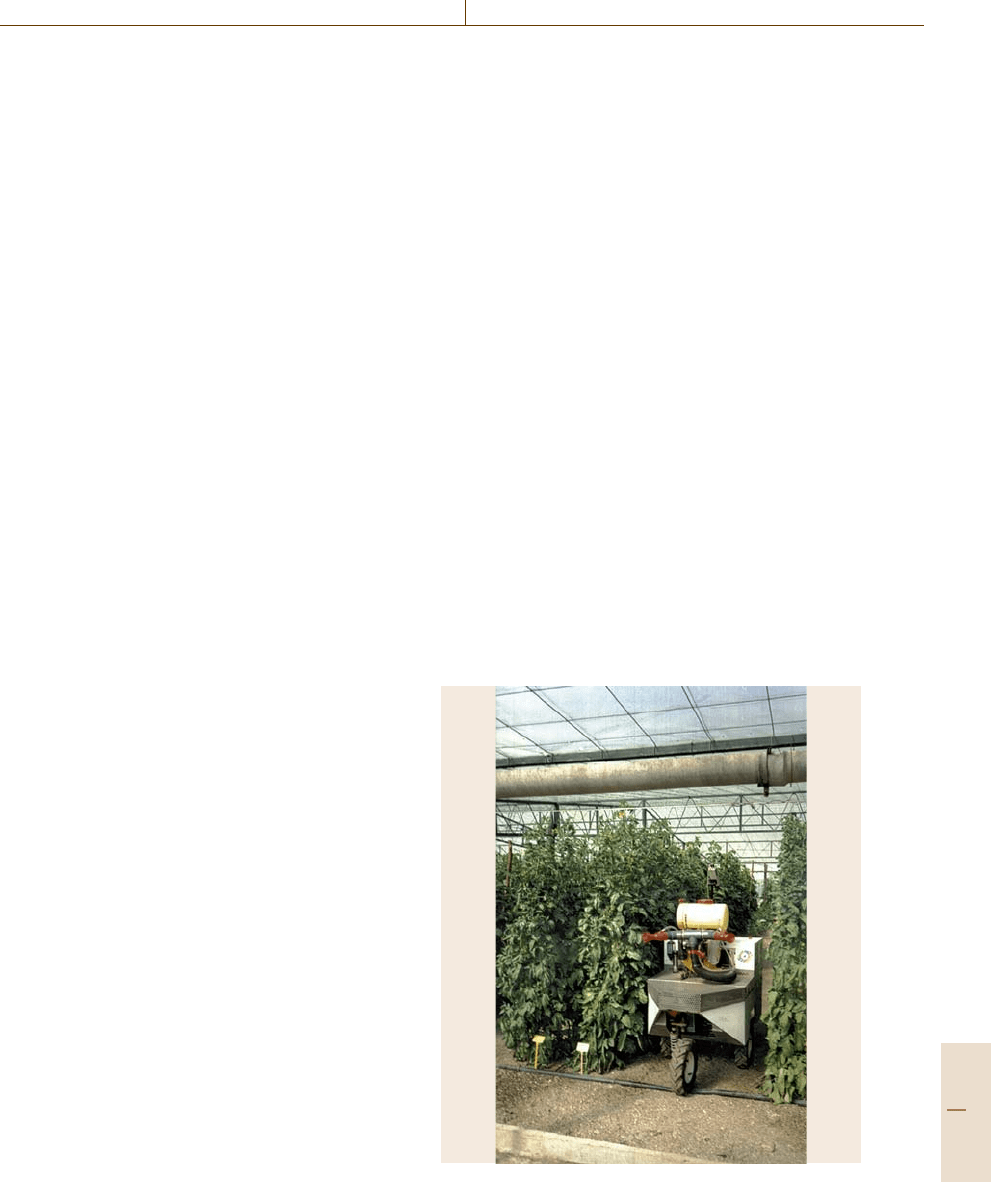
Fig. 16.12 The Aurora robot spraying a greenhouse
Part B 16.4

288 Part B Automation Theory and Scientific Foundations
tic accurate models. If the state is assumed to be only
partially observable, then partially observable Markov
decision processes (POMDPs) can be used to consider
stochastic inaccurate models.
The outer loop (the upper level in the control archi-
tecture) in Fig.16.10 is based on the consideration of
cognitive models of the environment obtained from the
geometric representations, knowledge extracted from
the sensorial information, i.e., identification of partic-
ular objects in the environment (i.e., traffic signals),
and previous human knowledge onthe existing relations
between these objects and the vehicle navigation.
A key architectural issue is the appropriated com-
bination of reactivity and planning. This is related to
the interaction between the different levels or control
loops in Fig.16.10 and has a significant impact on the
methods to be applied. Thus, some control architec-
tures are based on the application of very simple motion
strategies, without considering uncertainties or mobile
objects in the environment, and providing reactivity
based on real-time sensing of the environment. Reac-
tive techniques can be implemented in behavior-based
control architectures to navigate in natural environ-
ments without models or with a minimal model of the
environment. Figure 16.12 shows the Aurora mobile
robot [16.43] which uses a behavior-based architec-
ture to navigate in greenhouses usingultrasonic sensors.
Other architectures are based on dynamic planning
by incorporating environment information in real time
and producing a new plan that reacts appropriately
to the new information. In the architecture presented
in [16.42] planning techniques based on the kinemat-
ics model of the vehicle are used to generate parking
maneuvers for articulated vehicles (Fig.16.8).
One of the main general trends is the integration
of control and perception components into embedded
systems that can be networked using wired or wireless
technologies, leading to cooperating objects, with sens-
ing and/or actuation capabilities based on sensor fusion
methods that allow full interaction with the environ-
ment. Open challenges are related to the development
of tools for the analysis and design of these systems.
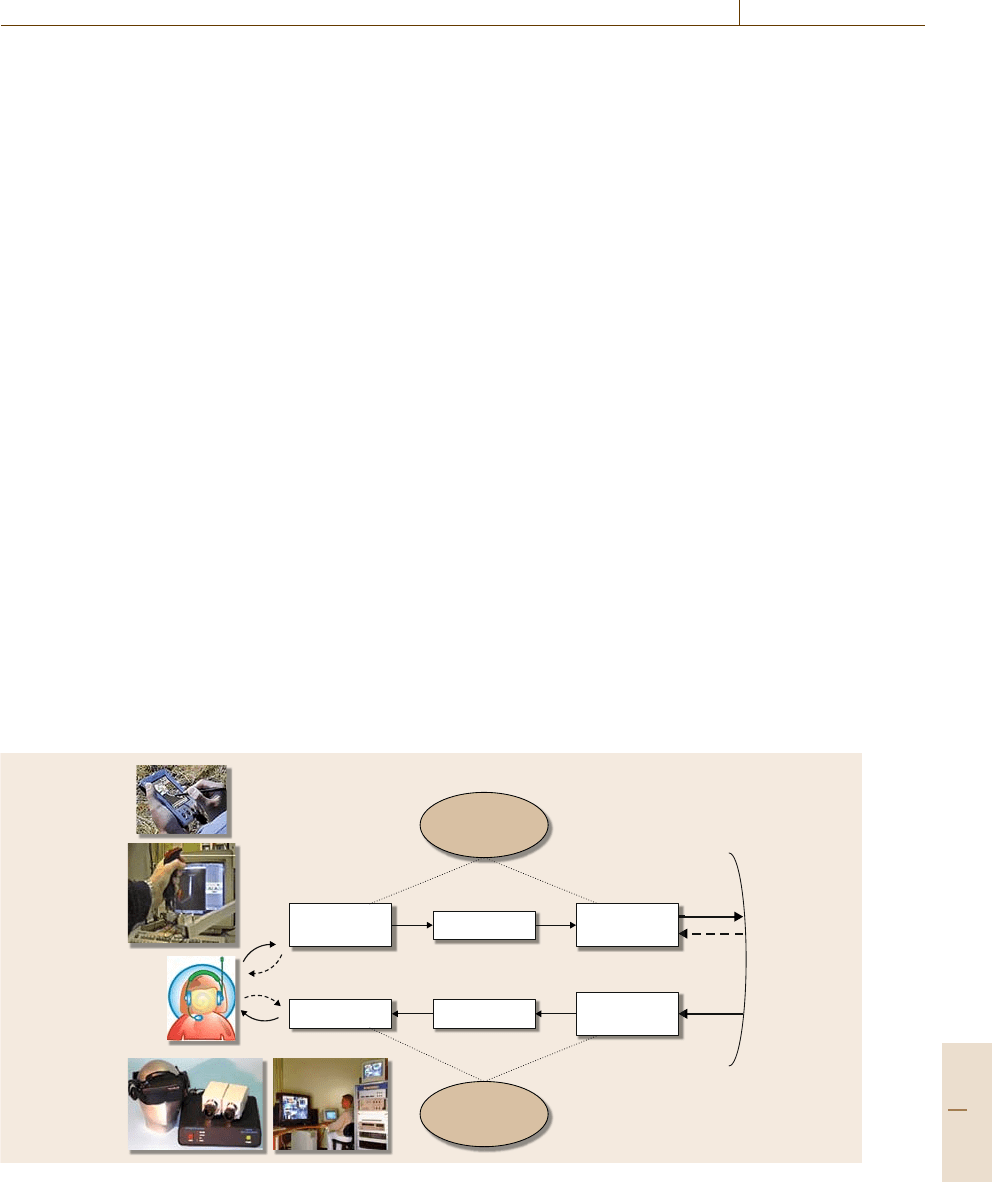
16.5 Human Interaction
In practice mobility automation requires the interven-
tion of humans at a certain level. The key point is the
level of interaction. Thus, with regards to Fig.16.10,
the human can be provided with information from the
cognitive models, which encode expertise from other
operators, and use this information to decompose a mis-
sion into tasks to be planned by the task generator
module in the Fig.16.10.
However, if the task planner does not exist, the hu-
man operator can interact with the second outer loop.
In this case the human operator can use the map of the
environment displayed on a suitable display to generate
a sequence of waypoints for the vehicle using an appro-
priate interface to specify these waypoints by means of
a joystick or a simple mouse. The human operator can
also generate in the next inner loop a suitable trajectory
assisted by computer tools to visualize in an appropri-
ate way the distances to the surrounding obstacles and
check the suitability of these trajectories to be executed
by the particular vehicle being commanded. Going to
the right in the control loops of Fig. 16.10, the operator
could directly provide commands to the vehicle control
loop by observing significant environment features in
the images provided by the onboard camera or cameras.
The above-mentioned interactions involve hardware
and software technologies to provide appropriate senso-
rialfeedback(visual,audio...)tothehumanpilotsand
generate actions at different levels from direct guidance
to waypoint and task specification.
At this point it is necessary to distinguish between
human interventions onboard the vehicle and operation
in a remote teleoperation station or from suitable re-
mote devices such as personal digital assistants (PDAs)
or even mobile phones involving the communication
system, as shown in Fig. 16.13. The first approach
can be considered as a compromise solution between
vehicle full driving automation, which removes the
driver from the control loop, to assisted driving to im-
prove efficiency and reduce accidents, as mentioned in
the Introduction. Integration of automatic functions in
conventional cars has been a trend in the last years.
Autonomous parking of conventional vehicles is an ex-
ample of this trend. On the other hand, the development
of mixed autonomous/manual driving cars seems a suit-
able approachfor thegradual integration ofautonomous
vehicles on regular roads. Furthermore, the automation
of functions in aircraft navigation is also well known.
In the following, the remote teleoperation of vehi-
cles is considered. Figure 16.13 illustrates teleoperation
schemes.
The low-level classical teleoperation approach con-
sists of the presentation to the remote teleoperator of
Part B 16.5
Automation of Mobility and Navigation 16.5 Human Interaction 289
images from a camera or cameras mounted on the front
of the vehicle. Then, the vehicle is guided manually us-
ing joysticks, pedals or similar interfaces to the ones
existing in the driving position onboard the vehicles.
This approach has many problems; for example, the
images may be degraded due to bandwidth instability,
leading to poor spatial resolution and variable update
rates, degrading the perception of the motion. Further-
more, an important problem is the presence of delays in
both the images and sensor data sent to the operator and
the operator commands sent back to the vehicle. These
delays may generate instability ofthe teleoperation con-
trol loop.
Various technologies have been proposed to over-
come these problems. Thus, instead of showing in the
display the data and images from the vehicles, it is pos-
sible to process these data to extract relevant features to
be displayed. Note that this approach can be included
in the inner (faster) control loop of Fig. 16.10. The
computation of distances in the second loop could be
relevant too. Moreover, the displaying of geometric rep-
resentations of the environment around the vehicle (see
also Fig.16.13) combined with the images (augmented-
reality technologies) could also be very useful.
A classical method to reduce the harmful effect
of delays in the transmission of images is the use of
predictive displays with a synthetic graphic of the ve-
hicle obtained by means of a simulation model. The
graphic is overlaid on the real delayed images from the
vehicle. This representation leads the operator to per-
Actuation
generation
Actuation
generation
Transmission
Information
acquisition
TransmissionPresentation
Planning
reacting
control
Perception
active perception
Fig. 16.13 Human interaction loops
ceive in advance the effect of his commands, which can
be used to compensate for delays. This can be easily
combined with the augmented reality mentioned above.
Thus, real-world imagery is embedded within a display
of computer-generated landmarks or objects represent-
ing the same scene. Thecomputer-generatedcomponent
of a display can be updated immediately in response to
control inputs from the human operator, providing rapid
feedback to the operator. If a model of the environment
is known, it can be stored in databases and rendered
based, for example, on the current GPS position of the
vehicle.
Obviouslythe navigation conditions may have a sig-
nificant effect on the operators. Thus, it has been
pointed out that UAV operators may not modify their
visual scanning methods to compensate for the non-
recreated multisensory cues. In order to improve the
perception of the operators, haptic and multimodal in-
terfaces (e.g., tactile and auditory) have been proposed.
Multimodal interfaces may be used not just to com-
pensate for the teleoperator’s sensory environment, but
more generallyto reducecognitive-perceptual workload
levels. Thus, for example, [16.44] have found that audio
and tactile messages can improve many aspects of flight
control and overall awareness of the situation in UAV
teleoperation.
The teleoperation methods presented above greatly
depend on communication between the vehicle and
the teleoperation station. The development of mobile
communication in the last decade has changed the sit-
Part B 16.5

290 Part B Automation Theory and Scientific Foundations
uation when compared with the existing technologies
when the first autonomous vehicles where developed in
the 1980s. Obviously, the communication technologies
to be applied greatly depend of the level of interven-
tion of the human teleoperator in the architecture of
Fig.16.13. Thus, high-bandwidth communication is es-
sential at the lower- and high-frequency loops, where
vehicle onboard autonomy is low and generation of
teleoperation commands depends on observation of the
images and information from other sensors onboard the
vehicle. However, if the vehicle has onboard auton-
omy, the communication with the user does not require
high bandwidth. Thus, for example, GSM (global sys-
tem for mobile communications) and GPRS (general
packet radio service) have been used for communicat-
ing the vehicles with the users through their mobile
phones and PDAs. Furthermore, Wi-Fi (IEEE 802.11)
has been applied for communication with the vehicle
at low velocity and short range. An emerging trend is
the application of ad hoc mobile networks to take into
account the particular mobility of vehicles.
The development of models of the loops in
Fig.16.13, as well as new analysis and design tools
using these models, are important challenges to be
addressed. These models should involve not only the
vehicles, the control devices, and communication chan-
nels, but also suitable models of the human perception
and action mechanisms, which typically require signif-
icant experimentation efforts to cope with the behavior
of operators under different working conditions.
16.6 Multiple Mobile Systems
The automation of multiple vehicles offers many ap-
plication possibilities. The interest in transportation is
obvious. A basic configuration of multiple vehicles con-
sists of a leader followed by vehicles in a single row.
This is usually known as platooning [16.45]. The con-
trol of a platoon can be implemented by means of a local
strategy, i.e., each vehicle is controlled from the unique
data received from the vehicle at the front [16.46]. This
approach relies mainly on the single-vehicle control
problem considered above. The main drawback is that
the regulation errors introduced by sensors noises grow
from the first vehicle to the last one, leading to os-
cillations. Intervehicle communication can be used to
overcome this problem [16.47]. Then, the distance, ve-
locity, and acceleration with respect to the preceding
vehicle are transmitted in order to predict the position
and improve the controller by guaranteeing the stabil-
ity of tight platoon applications [16.48]. Intervehicle
communication can also be used to implement global
control strategies.
The formation of multiple vehicles is also useful
for applications such as searching and surveying, ex-
ploration and mapping, hazardous material handling
systems, active reconfigurable sensing systems, and
space-based interferometry. The advantages when com-
paring with single-vehicle solutions are increased effi-
ciency, performance, reconfigurability, and robustness.
An added advantage is that new formation members
can be introduced to expand or upgrade the formation,
or to replace a failed member. Thus several applica-
tions of aerial, marine, and ground vehicle formations
have been proposed. In these formations, the members
of the group of vehicles should keep user-defined dis-
tances from other group members. The control problem
consists of maintaining these user-defined distances.
Formation control involves the design of distributed
control laws with limited and disruptedcommunication,
uncertainty, and imperfect or partial measurements. The
most common approach is the leader-follower [16.49].
This approach has limitations when considering the re-
liability of the leaders and the lack of explicit feedback
from the follower to the leader. Then, if the follower
is perturbed by some disturbances, the formation can-
not bemaintained. Thereare also alternativeapproaches
based on virtual leaders [16.50], which is a reference
point that moves according to the mission. The stability
of the formation has been studied by many researchers
that have proposed robust controllers to provide insen-
sitivity to possibly large uncertainties in the motion
of nearby agents, transmission delays in the feedback
path, and the effect of quantized information. There are
also behavior-based methods [16.51], which are often
inspired by biology, where formation behaviors such
as flocking and following are common. Different be-
haviors are defined as control laws for reaching and/or
maintaining a particular goal. An emerging trend in for-
mation control is the integration of obstacle avoidance
into control schemes.
Other approaches are based on the consideration of
teams of robots describing different trajectories to ac-
complish tasks. Furthermore, having a team with multi-
ple heterogeneous vehicles offers additional advantages
due to the possibility of exploiting the complementar-
ities of vehicles with different mobility attributes and
Part B 16.6
Automation of Mobility and Navigation 16.6 Multiple Mobile Systems 291
also different sensors with different perception func-
tionalities. The vehicles need to be coordinated in time
(synchronization) to accomplish missions such as mon-
itoring. Spatial coordination is required to ensure that
each vehicle will be able to perform its plan safely and
coherently, regarding the plans of the others. Assum-
ing that multiple robots share the same world, a path
should be computed for each one that avoids collisions
with obstacles and with other robots. Some formula-
tions are based on the extension of single-robot path
planning concepts such as the configuration space. If
there are nr robots and each robot has a configuration
space C
i
, i = 1,...,nr, the state space is defined as
the Cartesian product X = C
1
×C
2
×···×C
nr
and the
obstacle region in X is
X
obs
=
nr
i=1
X
i
obs
∪
⎛
⎝
nr
ij,i=j
X
ij
obs
⎞
⎠
,
(16.4)
where X
i
obs
and X
ij
obs
are the robot–obstacle and the
robot–robot collision states. The problem is to find
a continuous path in the free space from the initial state
to the goal state, avoiding the obstacle region defined
by (16.4). The classical planning algorithms for a sin-
gle robot with multiple bodies [16.37] could be applied
without adaptation in case of a centralized planning that
takes into account all robots. The main concern, how-
ever, is that the dimension of the state space grows
linearly in the number of robots. Complete algorithms
require time that is at least exponential in dimension.
Sampling-based algorithmsare morelikely to scale well
in practice when there many robots, but the resulting
dimension might still be too high. There are also decou-
pled path planning approaches such as the prioritized
planning that considers one robot at a time according to
a global priority.
On the other hand, cooperation is defined in the
robotic literature as a joint collaborative behavior that
is directedtowardsome goal inwhichthere is acommon
interest or reward. According to [16.54], given some
task specified by a designer, a multiple-robot system
displays cooperative behavior if, due to some underly-
ing mechanism, there is an increase in the total utility
of the system. Cooperative perception can be defined
as the task of creating and maintaining a consistent
view of a world containing dynamic objects by a group
of agents, each equipped with one or more sensors.
Cooperative vision perception has become a relevant
topic in the multirobot domain, mainly in structured
environments [16.55, 56]. In [16.57] cooperative per-
ception methods for multi-UAV system are proposed.
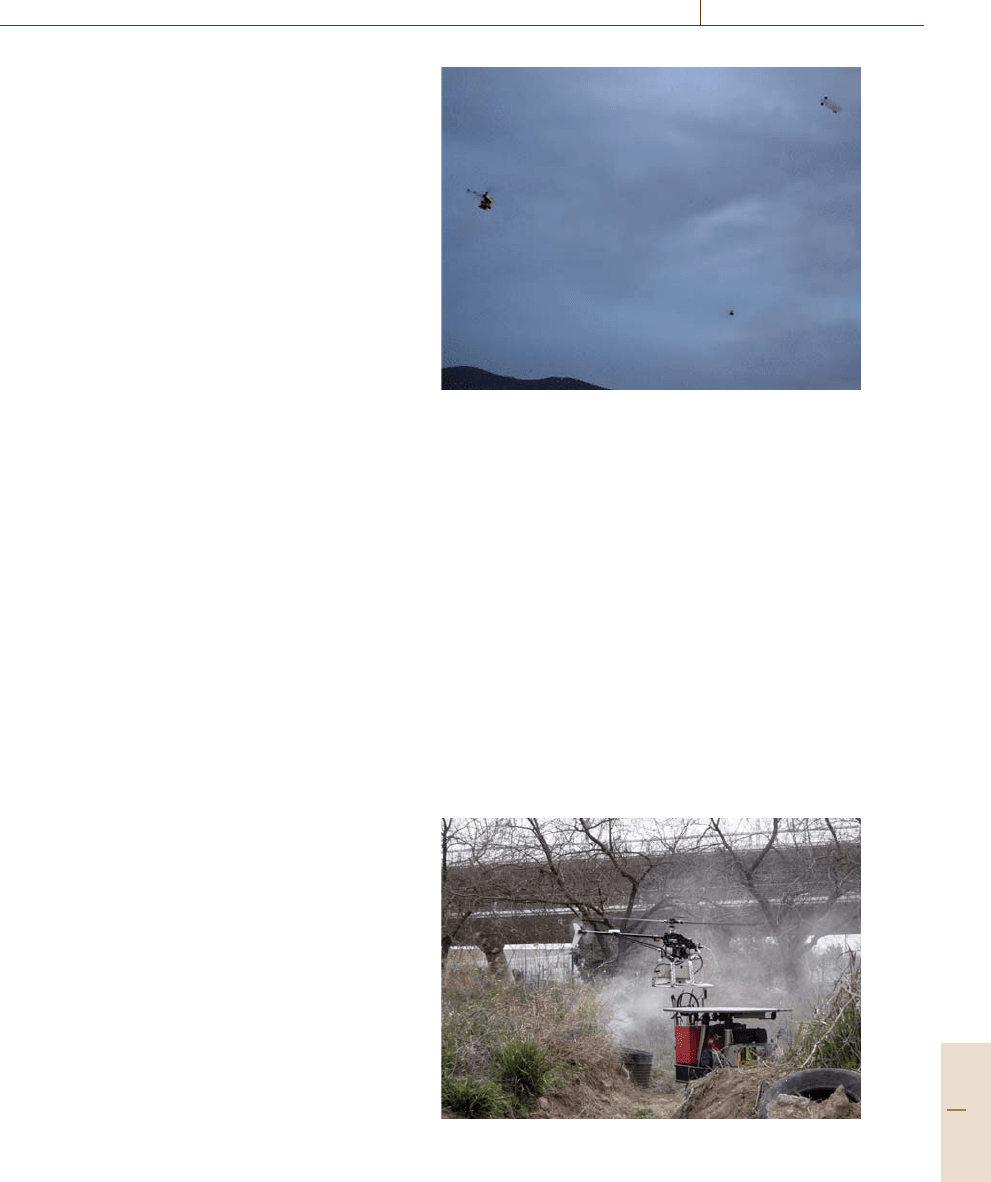
Fig. 16.14 Coordinated flights in the COMETS project
[16.52]
These methods have been implemented in the archi-
tecture designed in the COMETS project (acronym of
the project real-time coordination and control of mul-
tiple heterogeneous unmanned aerial vehicles) [16.58]
(Fig.16.14). Cooperative perception requires integra-
tion of the results of individual perception. Each robot
extracts knowledge by applying individual perception
techniques, and the overall cooperative perception is
performed by merging the individual results. This
approach requires knowing the relative position and ori-
entation of the robots. If the GPS signal is not available,
position estimation based on environment perception
should be applied [16.59,60]. The cooperation of mo-
bile entities also involves the generation of appropriated
motion of the involved entities. In [16.61] the coopera-
Fig. 16.15 Experiment of the CROMAT system for
the cooperation of aerial and ground robots [16.53],
http://grvc.us.es/cromat
Part B 16.6
292 Part B Automation Theory and Scientific Foundations
Multiple vehicle
systems
Formations
Teams
Homogeneous teams,
swarms,
heterogeneous teams
Formation stability,
guidance,
obstacle avoidance
Temporal coordination: synchronization,
spatial coordination: path planning,
task planning
Fig. 16.16 Methods in multiple vehi-
cle systems
tion is categorized into:swarm type, dealingwith a large
number of homogeneous robots, usually involving nu-
merous repetitions of the same activity over a relatively
large area; and intentional cooperation, usually requir-
ing a smaller number of possibly heterogeneous robots
(Fig.16.15) performing several distinct tasks. In these
systems the multirobot task allocation problem [16.62]
is appliedto maximizethe efficiencyof theteam anden-
sure proper coordination among team members to allow
them to complete their mission successfully. Recently,
a very popular approach to multirobot task allocation
has been the application of market-based negotiation
rules by means of the contract net protocol [16.63,
64].
Figure 16.16 shows the different types of multiple-
vehiclesystems and the methods that are applied in each
type.
Communication and networking also play an im-
portant role in the implementation of control systems
for multiple unmanned vehicles. The star-shaped net-
work configuration with all the vehicles linked to the
control station with an unshared link only works well
with small teams. When the number of vehicles grows
it could be necessary to apply wireless heterogeneous
networks with radio nodes mounted at fixed ground sta-
tions, on ground vehicles, and in UAVs, and the routing
techniques allow any two nodes to communicate either
directly or through an arbitrary number of other nodes
which act as relays. Furthermore, when there is little
or no infrastructure, networks could be formed in an
ad hoc fashion and information exchanges occur only
via the wireless networking equipment carried by the
individual UAVs.
Finally, it should be noted that the wireless net-
working of teams of robots with sensors and actuators
embedded in the infrastructure is a new research and
development trend with many potential applications.
The AWARE project (http://www.aware-project.net)
is developing a new platform for the cooperation
of autonomous aerial vehicles with ground wireless
sensor–actuator networks. This platform will have
self-deployment and self-configuration features for op-
eration in sites without sensing and communication
infrastructure.
16.7 Conclusions
Mobility and navigation have been very relevant topics
in automation. Thus, automation of mobility plays an
important role in factory automation. The automation
of the transportation of people and goods in noncon-
trolled environments is more difficult and its complexity
depends on the flexibility. This chapter has analyzed
automation of mobility and navigation by focusing on
autonomous vehicles. Then, vehicle motion control has
been examined, and the main problems in navigation
control and interaction of the vehicle with the environ-
ment were also studied. Moreover, taking into account
that practical applications usually require some degree
of human intervention, human interaction and related
technologies were reviewed. The last part of the chapter
was devoted to systems of multiple autonomous vehi-
cles, including formations and fleets of homogeneous
vehicles and also teaming of heterogeneous vehicles.
The control and cooperation of these autonomous vehi-
cles to accomplish tasks is an emerging trend that poses
different challenges.
References
16.1 R. Marín, J. Garrido, J.L. Trillo, J. Sáez, J. Armesto:
An industrial automated warehouse based on
overhead trolleys, MCPL’97 IFAC/IFIP Conf. Manag.
Control Prod. Logist. (Campinas, 1997) pp. 137–142
Part B 16

Automation of Mobility and Navigation References 293
16.2 C.E. Thorpe (Ed.): Vision and Navigation: The
Carnegie Mellon Navlab (Kluwer, Boston 1990)
16.3 M. Parent, A. de La Fortelle: Cybercars: past,
present and future of the technology, Proc. ITS
World Congr. (2005)
16.4 R. Horowitz, P. Varaiya: Control design of an au-
tomated highway system, Proc. IEEE 88(7), 913–925
(2000)
16.5 UAV Forum: http://www.uavforum.com/ (last ac-
cessed March 5, 2009)
16.6 J. Moraleda, A. Ollero, M. Orte: A robotic system for
internal inspection of water pipelines, IEEE Robot.
Autom. Mag. 6(3), 30–41 (1999)
16.7 H.M. Kim, J. Dickerson, B. Kosko: Fuzzy throttle and
brake control for platoons of smart cars, Fuzzy Sets
Syst. 84, 209–234 (1996)
16.8 R.W. Brockett: Asymptotic stability and feedback
stabilization. In: Differential Geometric Control
Theory,ed.byR.S.Millman,R.W.Brockett,
H.H. Sussmann (Birkhauser, Boston 1983)
16.9 C.Y. Chan, H.S. Tan: Feasibility analysis of steering
control as a driver-assistance function in collision
situations, IEEE Trans. Intell. Transp. Syst. 2(1), 1–9
(2001)
16.10 J.H. Hahn, R. Rajamani, L. Alexander: GPS-based
real-time identification of tire–road friction co-
efficient, IEEE Trans. Control Syst. Technol. 10(3),
331–343 (2002)
16.11 B. Samadi, R. Kazemi, K.Y. Nikravesh, M. Kabga-
nian: Real-time estimation of vehicle state and
tire-road friction forces, Proc. Am. Control Conf.
(Arlington 2001) pp. 3318–3323
16.12 J. Huang, J. Ahmed, A. Kojic, J.P. Hathout: Control
oriented modeling for enhanced yaw stability and
vehicle steerability, Proc. Am. Control Conf. (Boston
2004) pp. 3405–3410
16.13 A. Kamga, A. Rachid: Speed, steering angle and
path tracking controls for a tricycle robot, Proc.
IEEE Int. Symp. Computer-Aided Control Syst. Des.
(Dearborn 1996) pp. 56–61
16.14 C. deWit, B. Siciliano, G. Bastin: Theory of Robot
Control (Springer, Berlin Heidelberg 1997)
16.15 A. Ollero: Robótica. Manipuladores y Robots
Móviles (Marcombo, Spain 2001), in Spanish
16.16 J. Wit, C.D. Crane, D. Armstrong: Autonomous
ground vehicle path tracking, J. Robot. Syst. 21(8),
439–449 (2004)
16.17 A. Rodríguez-Casta
˜
no, A. Ollero, B.M. Vinagre,
Y.Q. Chen: Setup of a spatial lookahead path track-
ing controller, Proc. 16th IFAC World Congr. (Prague
2005)
16.18 T. Hellstr
¨
om, T. Johansson, O. Ringdahl: Devel-
opment of an autonomous forest machine for
path tracking, Springer Tracts Adv. Robot., Vol. 25
(Springer, Berlin Heidelberg 2006) pp. 603–614
16.19 G. Heredia, A. Ollero: Stability of autonomous ve-
hicle path tracking with pure delays in the control
loop, Adv. Robot. 21
(1), 23–50 (2007)
16.20 DARPA Grand Challenge: Special issue, J. Field
Robot. 23(8/9), 461–835 (2006)
16.21 J.Y. Wang, M. Tomizuka: Robust H∞ lateral con-
trol for heavy-duty vehicles in automated highway
systems, Proc. Am. Control Conf. (San Diego 1999)
pp. 3671–3675
16.22 G.H. Elkaim, M. O’Connor, T. Bell, B. Parkinson:
System identification and robust control of farm
vehicles using CDGPS, Proc. ION GPS-97 (Kansas City
1997) pp. 1415–1424
16.23 A. González-Cantos, A. Ollero: Backing-up maneu-
vers of autonomous tractor-trailer vehicles using
the qualitative theory of nonlinear dynamical sys-
tems,Int.J.Robot.Res.28(1), 49–65 (2009)
16.24 A. Astolfi, P. Bolzern, A. Locatelli: Path-tracking of
a tractor-trailer vehicle along rectilinear and circu-
lar paths: a Lyapunov-based approach, IEEE Trans.
Robot. Autom. 20(1), 154–160 (2004)
16.25 A. Ollero, L. Merino: Control and perception tech-
niques for aerial robotics, Annu. Rev. Control 28,
167–178 (2004)
16.26 O. Amidi, T. Kanade, K. Fujita: A visual odometer for
autonomous helicopter flight, Robot. Auton. Syst.
28, 185–193 (1999)
16.27 M. Bejar, A. Ollero, F. Cuesta: Modeling and control
of autonomous helicopters. In: Advances in Control
Theory and Application, Lect. Notes Control Inf. Sci.,
Vol. 353, ed. by C. Bonivento, A. Isidori, L. Marconi,
C. Rossi (Springer, Berlin Heidelberg 2007) pp. 1–27
16.28 AWARE Project: http://www.aware-project.net (last
accessed March 5, 2009)
16.29 A. Ollero, A. García-Cerezo, J.L. Martínez,
A. Mandow: Fuzzy tracking methods for mobile
robots. In: Applications of Fuzzy Logic: Towards
High Machine Intelligence Quotient Systems,Vol.9,
ed. by M. Jamshidi, L. Zadeh, A. Titli, S. Boverie
(Prentice Hall, Upper Saddle River 1997) pp. 347–
364, Chap. 17
16.30 G. Buskey, G. Wyeth, J. Roberts: Autonomous he-
licopter hover using an artificial neural network,
Proc. IEEE Int. Conf. Robot. Autom. (2001) pp. 1635–
1640
16.31 A. Ollero, A. Rodríguez-Castaño, G. Heredia: Anal-
ysis of a GPS-based fuzzy supervised path tracking
system for large unmanned vehicles, Proc. 4th IFAC
Int. Symp. Intell. Compon. Instrum. Control Appl.
(SICICA) (Buenos Aires 2000) pp. 141–146
16.32 F.Conticelli,D.Prattichizzo,F.Guidi,A.Bicchi:
Vision-based dynamic estimation and set-point
stabilization of nonholonomic vehicles, Proc. 2000
IEEE Int. Conf. Robot. Autom. (San Francisco 2000)
pp. 2771–2776
16.33 J. González, A. Stenz, A. Ollero: A mobile robot
iconic position estimator using a radial laser scan-
ner, J. Intell. Robot. Syst. 13, 161–179 (1995)
16.34 M. Buehler, K. Iaguemma, S. Singh: The 2005 DARPA
Grand Challenge, Springer Tracts Adv. Robot.,
Vol. 36 (Springer, Berlin Heidelberg 2007)
Part B 16

294 Part B Automation Theory and Scientific Foundations
16.35 DARPA Urban Challenge: http://www.darpa.
mil/grandchallenge/images/photos/11_4_07/D2X_
1328.jpg (last accessed March 5, 2009)
16.36 S. Thrun, W. Burgard, D. Fox: Probabilistic Robotics,
Intelligent Robotics and Autonomous Agents (MIT
Press, Cambridge 2005)
16.37 R.C. Latombe: Robot Motion Planning (Kluwer,
Boston 1991)
16.38 S.M. LaValle: Rapidly-exploring random trees:
A new tool for path planning TR 98-11 (Iowa Univ.,
Iowa 1998)
16.39 O. Khatib: Real-time obstacle avoidance for ma-
nipulators and mobile robots, Int. J. Robot. Res.
5(1), 90–98 (1986)
16.40 S.A. Masoud, A.A. Masoud: Motion planning in the
presence of directional and regional avoidance
constraints using nonlinear, anisotropic, harmonic
potential fields: a physical metaphor, IEEE Trans.
Syst. Man Cybern. Part A, 32(6), 705–723 (2002)
16.41 V.F. Muñoz, A. Ollero, M. Prado, A. Simón: Mo-
bile robot trajectory planning with dynamic and
kinematic constraints, Proc. IEEE Int. Conf. Robot.
Autom., San Diego (1994) pp. 2802–2807
16.42 F.Cuesta,A.Ollero:Intelligent mobile robot
navigation, Springer Tracts Adv. Robot., Vol. 16
(Springer, Berlin Heidelberg 2005)
16.43 A. Mandow, J. Gomez de Gabriel, J.L. Martinez,
V.F. Mu
˜
noz, A. Ollero, A. García-Cerezo: The au-
tonomous mobile robot aurora for greenhouse
operation, IEEE Robot. Autom. Mag. 3(4), 18–28
(1996)
16.44 G.L. Calhoun, M.H. Draper, H.A. Ruff, J.V. Fontejon:
Utility of a tactile display for cueing faults, Proc.
Hum. Factors Ergon. Soc. 46th Annu. Meet. (2002)
pp. 2144–2148
16.45 P. Daviet, M. Parent: Platooning for small public
urban vehicles, 4th Int. Symp. Exp. Robot. (ISER’95)
(Stanford 1995) pp. 345–354
16.46 J. Bom, B. Thuilot, F. Marmoiton, P. Martinet:
Nonlinear control for urban vehicles platooning,
relying upon a unique kinematic GPS, 22nd Int.
Conf. Robot. Autom. (ICRA’05) (Barcelona 2005)
pp. 4149–4154
16.47 Y. Zhang, E.B. Kosmatopoulos, P.A. Ioannou,
C.C. Chien: Autonomous intelligent cruise control
using front and back information for tight vehi-
cle following maneuvers, IEEE Trans. Veh. Technol.
48(1), 319–328 (1999)
16.48 T.S. No, K.-T. Chong, D.-H. Roh: A Lyapunov func-
tion approach to longitudinal control of vehicles in
a platoon, IEEE Trans. Veh. Technol. 50(1), 116–124
(2001)
16.49 J.P. Desai, J.P. Ostrowski, V. Kumar: Modeling and
control of formations of nonholonomic mobile
robots, IEEE Trans. Robot. Autom. 17(6), 905–908
(2001)
16.50 M. Egerstedt, X. Hu, A. Stotsky: Control of mobile
platforms using a virtual vehicle approach, IEEE
Trans. Autom. Control 46, 1777–1782 (2001)
16.51 T. Balch, R.C. Arkin: Behavior-based formation
control for multi-robot teams, IEEE Trans. Robot.
Autom.
14, 926–939 (1998)
16.52 A. Ollero, I. Maza: Multiple Heterogeneous Aerial
Vehicles, Springer Tracts Adv. Robot., Vol. 37
(Springer, Berlin Heidelberg 2007)
16.53 I.Maza,A.Viguria,A.Ollero:Aerialandground
robots networked with the environment, Proc.
Workshop Netw. Robot Syst. IEEE Int. Conf. Robot.
Autom. (2005) pp. 1–10
16.54 Y.U. Cao, A.S. Fukunaga, A. Kahng: Cooperative
mobile robotics: Antecedents and directions, Au-
ton. Robots 4(1), 7–27 (1997)
16.55 T. Schmitt, R. Hanek, M. Beetz, S. Buck, B. Radig:
Cooperative probabilistic state estimation for
vision-based autonomous mobile robots, IEEE
Trans. Robot. Autom. 18(5), 670–684 (2002)
16.56 S. Thrun: A probabilistic online mapping algorithm
for teams of mobile robots, Int. J. Rob. Res. 20(5),
335–363 (2001)
16.57 L. Merino, F. Caballero, J.R. Martínez-de Dios,
J. Ferruz, A. Ollero: A cooperative perception system
for multiple UAVs: application to automatic detec-
tion of forest fires, J. Field Robot. 23(3), 165–184
(2006)
16.58 A. Ollero, S. Lacroix, L. Merino, J. Gancet, J. Wik-
lund, V. Remuss, I.V. Perez, L.G. Gutiérrez,
D.X. Viegas, M.A. González, A. Mallet, R. Alami,
R. Chatila, G. Hommel, F.J. Colmenero, B.C. Arrue,
J. Ferruz, J.R. Martinez-de Dios, F. Caballero: Mul-
tiple eyes in the skies, IEEE Robot. Autom. 12(2),
46–57 (2005)
16.59 K.Konolige,D.Fox,B.Limketkai,J.Ko,B.Stew-
art: Map merging for distributed robot navigation,
IEEE Int. Conf. Intell. Robot. Syst. (2003) pp. 212–
217
16.60 L. Merino, F. Caballero, J. Wiklund, A. Moe,
J.R. Martínez-de Dios, P.-E. Forssen, K. Nordberg,
A. Ollero: Vision-based multi-UAV position estima-
tion, Robot. Autom. Mag. 13(3), 53–62 (2006)
16.61 L.E. Parker: Alliance: An architecture for fault-
tolerant multi-robot cooperation, IEEE Trans.
Robot. Autom. 14(2), 220–240 (1998)
16.62 B.P. Gerkey, M.J. Mataric: A formal analysis and
taxonomy of task allocation in multi-robot sys-
tems,Int.J.Robot.Res.23(9), 939–954 (2004)
16.63 S.C. Botelho, R. Alami: M+: a scheme for multi-
robot cooperation through negotiated task alloca-
tion and achievement, Proc. IEEE Int. Conf. Robot.
Autom. (Detroit 1999)
16.64 B. Gerkey, M. Mataric: Sold: Auction methods for
multi-robot coordination, IEEE Trans. Robot. Au-
tom. 18(5), 758–768 (2002 )
Part B 16