Назаров Х.Н. Робототехнические системы и комплексы
Подождите немного. Документ загружается.


11
накопительных систем, системы энергопитания и т.п.; взаимодействующая с
данным роботом посредством информационных, материальных или энергетических
потоков.
1.3. Адаптивные и программные роботы.
Адаптивный робот является разновидностью самоприспосабливающихся
систем. Адаптивная система (самоприспосабливающаяся система) – система,
которая сохраняет работоспособность при непредвиденных изменениях свойств
управляемого объекта, целей управления или окружающей среды путем смены
алгоритма функционирования или поиска оптимальных состояний. По способу
адаптации различают самонастраивающиеся, самообучающиеся и
самоорганизующиеся системы. Наиболее характерная черта адаптации состоит в
накоплении и
немедленном использовании текущей информации для устранения
неопределенности из-за недостаточной априорной (начальной) информации с целью
сохранения работоспособности. Для интеллектуального робота начальная
неопределенность и непредвиденные изменения создаются внешней средой.
Текущая информация, воспринимаемая сенсорным устройством, определяет
характер процессов приспосабливания узлов робота к непредвиденным изменениям
внешней среды. В конечном счете, происходит формирование (или частичное
изменение) управляющих воздействий на исполнительную систему и внешнюю
среду. Таким образом, устройство управления интеллектуального робота является
адаптивным в полном смысле этого слова. Оно не только организует поведение
робота посредством управляющих программ, но и уточняет цели, планирует
действия, формирует управляющие программы. Поэтому интеллектуальный робот
обладает высшим уровнем адаптации к непредвиденным изменениям
внешней
среды. Уровень адаптации робота тем выше, чем совершеннее его искусственный
интеллект, сенсорное и вычислительное устройство.
Для практических применений не всегда имеется возможность использовать
интеллектуальных роботов с высоким уровнем адаптации не только потому, что они
еще не совершенны, но и потому, что они еще слишком дорогие.
Стоимость робота при одних и
тех же исполнительной и сенсорной системах
тем выше, чем выше обеспеченный уровень адаптации устройства управления
робота. Чем ниже уровень адаптации, тем выше требуемая степень упорядоченности
(определенности) во внешней среде, где будет функционировать робот. Требуется
полная упорядоченность объектов роботизации (внешней среды), когда робот
совершенно не обладает адаптацией. Такие роботы принято называть
программными (роботы 1-го поколения). Они не нуждаются в текущей информации
о полностью определенной внешней среде, так как работают по заранее
составленным на основе априорной информации и введенным в память ЭВМ
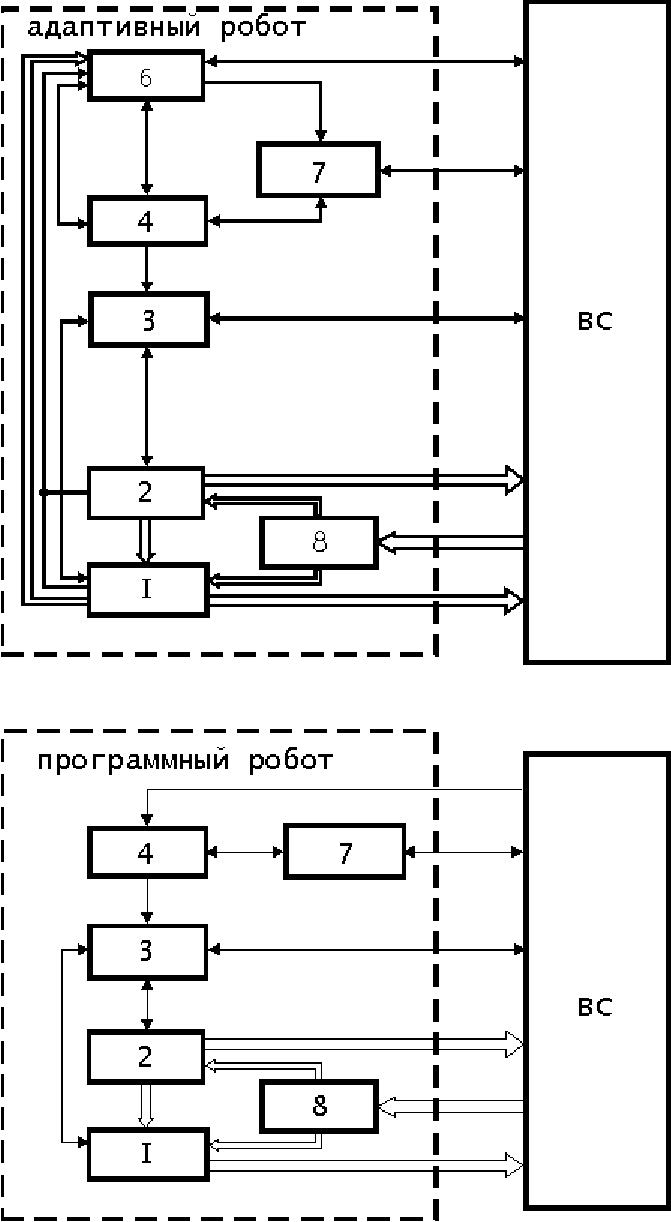
управляющим программам. Поэтому в схеме роботов 1-го поколения (рис.1.4)
отсутствуют сенсорное устройство и искусственный интеллект, содержащиеся в
составе роботов 3-го
поколения.
12
Рис.1.3 Схема адаптивного робота
Рис.1.4 Схема программного робота
Роботы 2-го поколения занимают промежуточное положение между
роботами 3-го (интеллектуальными) и 1-го (программными) поколений. Они могут
успешно функционировать в частично упорядоченной (не полностью определенной)
среде, изменения которой можно заранее предвидеть. Адаптация в них
обеспечивается за счет изменения управляющих воздействий на основе текущей
13
информации от сенсорного устройства. Роботы 2-го поколения являются
адаптивными, но неинтеллектуальными, в отличие от роботов 3-го поколения,
являющихся адаптивными и интеллектуальными. (Ради краткости роботы 2-го
поколения называют просто адаптивными, а роботы 3-го поколения -
интеллектуальными). В схеме адаптивного робота (рис.1.3) отсутствует
искусственный интеллект, являющийся обязательным компонентом роботов 3-го
поколения. В схемах программных
и адаптивных роботов роль устройства общения
выполняет пульт управления. В них вычислительное устройство выполняет более
скромные функции, чем в интеллектуальных роботах. Для них внешняя среда тоже
должна быть организованной соответствующим образом. Так, если для
интеллектуальных роботов допустима неупорядоченная, заранее неопределенная
внешняя среда, то для нормального функционирования программного робота
требуется детерминированная (
полностью определенная) внешняя среда ; а для
адаптивного робота внешняя среды должна быть, по крайней мере, частично
определенной. Для перехода от схемы робота 3-го поколения (рис.1.2) к схеме
робота 2-го поколения (рис. 1.3), достаточно исключить искусственный интеллект, а
для перехода от последней к схеме робота 1-го поколения (рис.1.4) – сенсорное
устройство (рис.1.2.).
На основании
вышеизложенного, адаптивному и программному роботам
можно дать следующие определения:
Адаптивный робот – гибкоперестраиваемое автоматическое устройство,
способное воспроизводить в частично определенной внешней среде заранее
запланированные двигательные функции, аналогично человеку.
Программный робот – гибкоперестраиваемый автомат, способный
воспроизводить в детерминированной внешней среде заранее запрограммированные
двигательные функции, аналогично человеку.
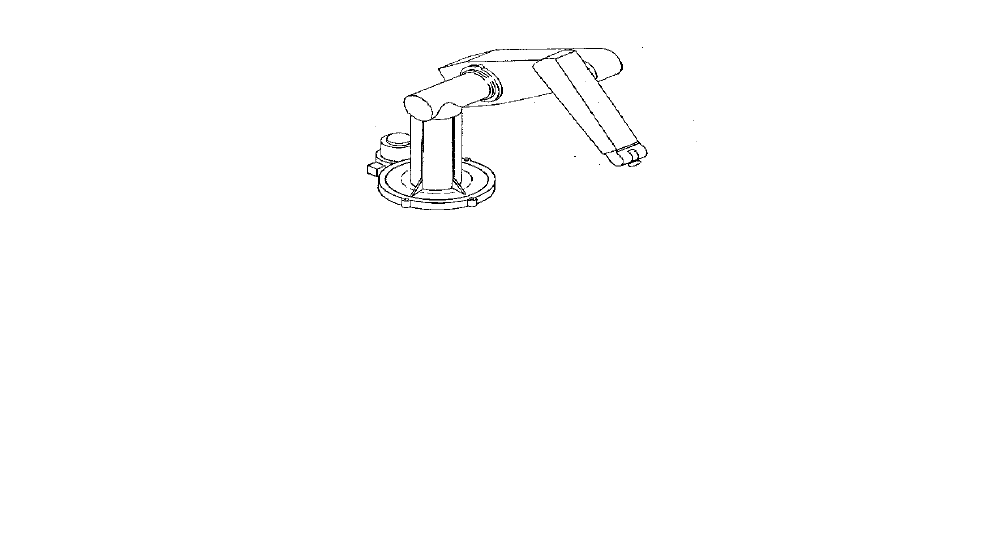
Примером программного робота является антропоморфный робот PUMA
(РМ
-01), который приведён на рис. 1.5.
Рис. 1.5. Антропоморфный программный робот PUMA.
По ГОСТу дано следующее определение промышленного робота.
Промышленный робот – это автоматическая машина, представляющая собой
манипулятор с перепрограммируемым устройством управления, для выполнения в
производственном процессе двигательных и управляющих функций, заменяющих
аналогичные функции человека при перемещении предметов производства и (или)
технологической оснастки
.
1.4. Классификация роботов
14
Роботы можно классифицировать по трем группам признаков, каждая из
которых характеризует одну из составных частей общей схемы робота (рис.1.1) или
робот в целом (общие признаки).
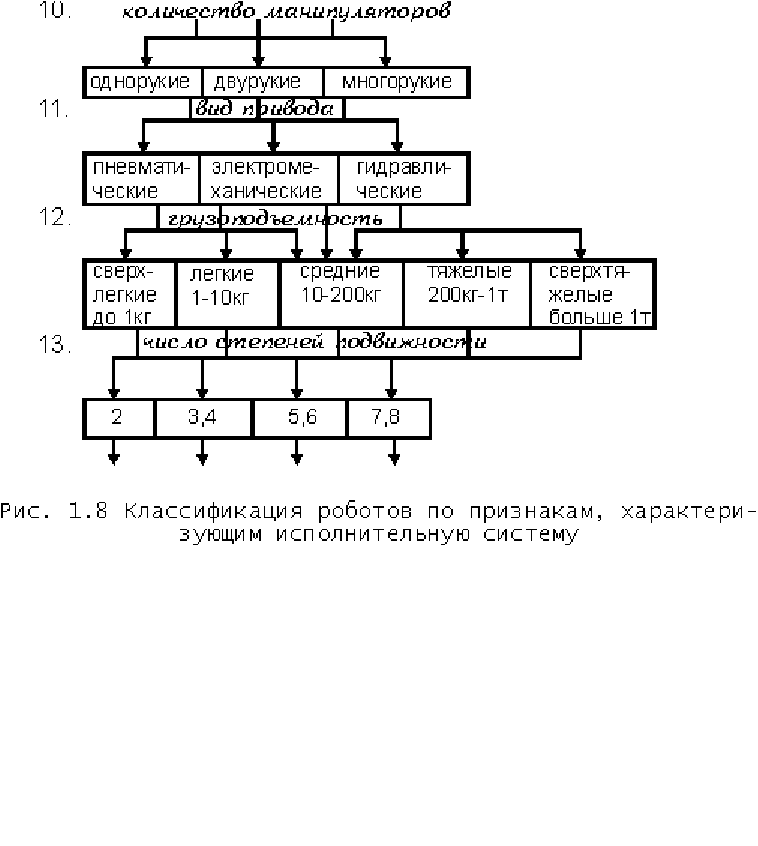
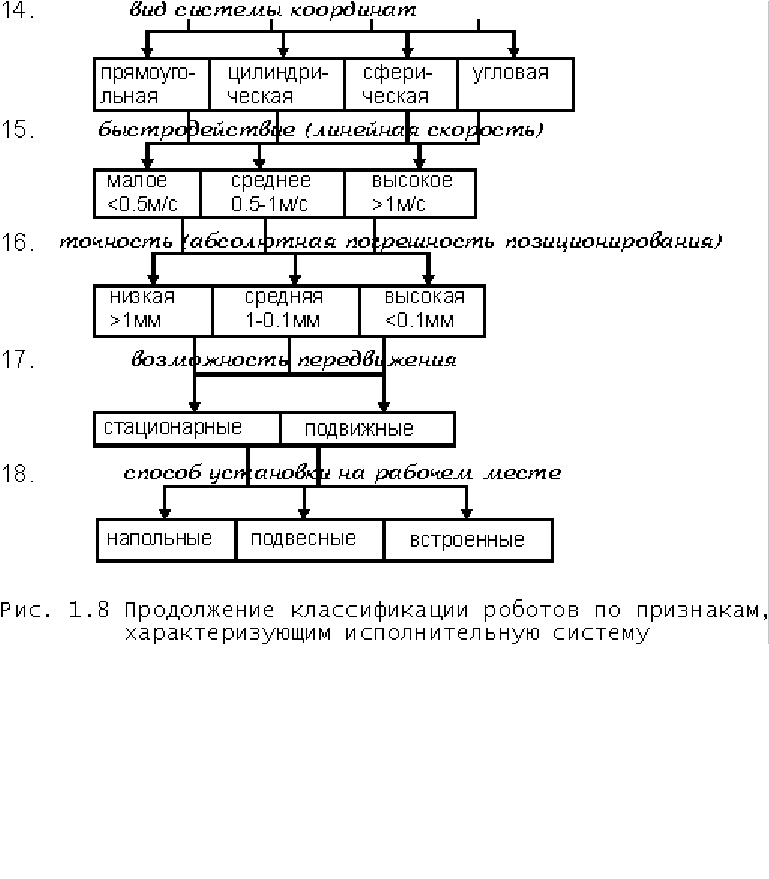
На рис. 1.6 - 1.8 представлена содержательная классификационная схема
манипуляционных роботов, в которой использовано 18 признаков. Ровно половина
из них (признаки 3,6,9,11-14,17,18) соответствуют признакам, установленным
ГОСТом на роботов промышленного назначения.
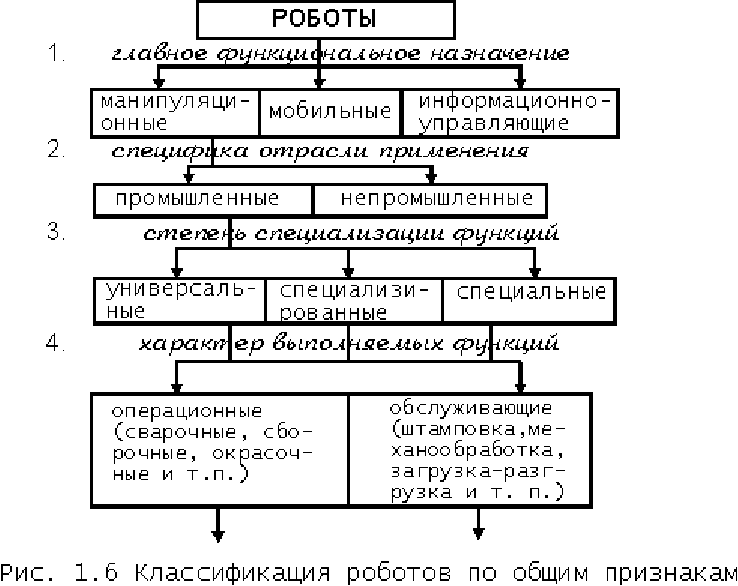
К группе общих признаков относятся (рис.1.5): главное функциональное
назначение робота; специфика отрасли применения; степень специализации
функций; характер выполняемых функций.
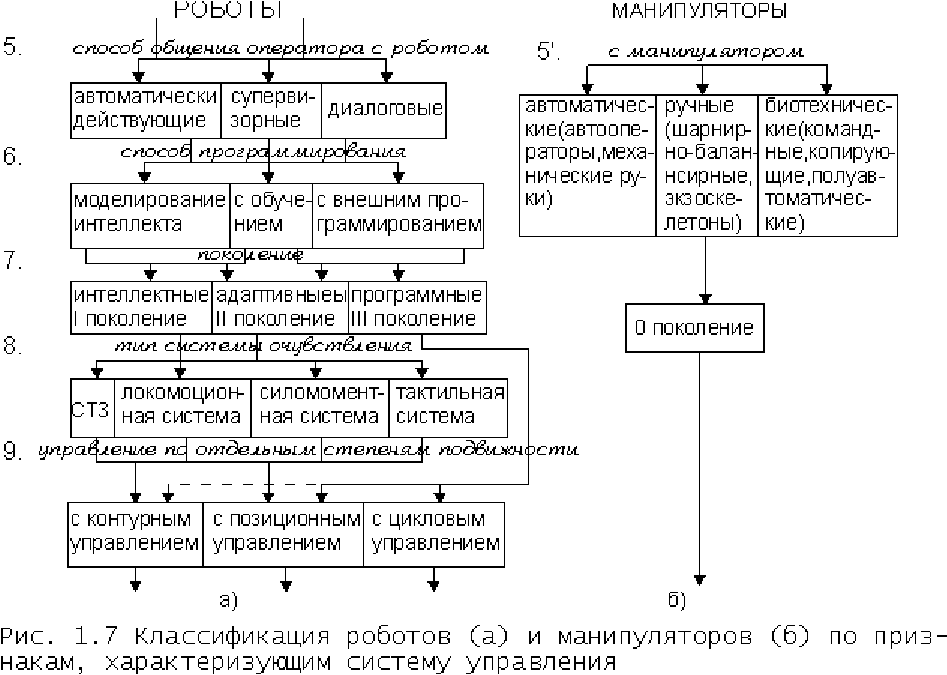
К группе признаков, характеризующих устройство управления
робота,
относятся (рис.1.6): способ общения оператора с роботом в ходе основного
(производственного или непроизводственного) процесса; способ программирования,
пополнение (класс сложности решаемых задач в зависимости от степени
определенности внешней среды); тип системы очувствления (для адаптивных и
интеллектуальных роботов); вид управления по отдельным степеням подвижности.
К группе признаков, характеризующих исполнительную систему робота,
относятся (рис.1.8); количество манипуляторов; основные виды приводов
манипуляторов и устройств передвижения; грузоподъемность в кг; число степеней
подвижности; вид системы координат; быстродействие (линейная скорость в м/с);
точность позиционирования (абсолютная погрешность позиционирования в мм);
возможность передвижения; способ установки на рабочем месте.
Последняя группа признаков может применяться и к манипуляторам
(предшественникам роботов,
или иначе, к условному нулевому поколению роботов).
Для придания информативности классификационной схеме она представлена
в виде блочной схемы. Каждый блок соответствует некоторому подмножеству всего
15
множества промышленных роботов и характеризуется признаками, указанными
сверху, и данными, приводимыми в блоке. Формат данных в каждом блоке
раскрывает численность в абсолютных единицах (или в процентах) от общего парка
промышленных роботов России и зарубежного парка по состоянию указанного в
блоке года. На рис. 1.5-1.7 указаны некоторые данные, приведенные в работе.
Отображение данных
позволяет проследить на несколько лет вперед тенденции
развития тех или иных классов роботов, выделить перспективные.
Использованный способ представления классификационной схемы позволяет
отразить нужную содержательную информацию о классах роботов в сжатой и
образной форме. В силу этого, приведенную схему можно назвать содержательной
классификационной схемой. На рис. 1.7 б, чтобы подчеркнуть различия роботов и
манипуляторов, дана классификация манипуляторов по двум отличающим их
признакам, характеризующих устройства управления.
Если схему 1.6
объединить со схемой классификации, приведенной на
рис.1.8, через шину 10, то получим классификационную схему, которая отражает
множество манипуляторов, на языке классификационных признаков роботов.
Таким образом, два варианта объединения рисунков 1.6, 1.7, 1.8 дают две
классификационные схемы: для роботов (рис.1.6, 1.6а, 1.8) и манипуляторов (рис.
1.7б, 1.8), представляющих в совокупности средства робототехники.
Путь, соединяющий верхнюю шину (1) на
рис.1.6 и шину 18 (рис.1.8),
проходящий через дуги и соответствующие блоки и шины, характеризует
конкретную разновидность класса (совокупность типов) роботов.
16
Развивая приведенную классификационную схему за счет детализации
отдельных блоков, путем учета дополнительных и конструктивных структурных
признаков и данных робота, можно получить более информативную семантическую
схему, которую можно использовать как пространство поиска структур и принципов
построения роботов.
Остановимся на некоторых классах роботов. Роботы, в зависимости от того,
какая из воспроизводимых ими
функций человека является главной, разбиваются
на 3 класса: манипуляционные; мобильные (движущиеся); информационные и
управляющие. Для первых двух классов основными являются двигательные
функции (характерные рукам и ногам человека), для третьего класса – некоторые
интеллектуальные функции человека (сбор, обработка и передача информации). В
соответствии с этим, основной частью исполнительной системы манипуляционных
роботов является манипулятор (от
латинского слова «manus» - рука) – механизм,
осуществляющий под управлением оператора или некоторой системы, действия
(манипуляции), аналогичные действиям руки человека. Манипуляционные роботы
образуют самый крупный класс роботов, а манипулятор в них на сегодняшний
день - это многозвенный механизм с разомкнутой кинематической цепью,
оснащенный приводами и рабочим органом (захватным устройством или рабочим
инструментом).
Основной частью
исполнительной системы мобильного (движущегося)
робота является устройство передвижения, на котором могут быть установлены
манипуляторы (или роботы). Мобильные роботы могут быть наземными,
подземными, подводными, воздушными, космическими. Наземные устройства
передвижения состоят из ходовой части и ее приводов и могут быть построены на
всех технически реализованных принципах передвижения, включая шагание,
ползание. Наиболее распространенными
среди наземных мобильных роботов
8
17
являются транспортные роботы в цехах гибких автоматизированных производств
для транспортировки деталей и инструмента.
Информационные и управляющие роботы соответствуют манипуляционным
или мобильным роботам 2 и 3 поколений. Но в отличие от них имеют более
развитую специализированную информационно-измерительную систему. В них
манипуляции и передвижения совершаются для реализации процессов получения
информации. Примерами таких роботов служат: измерительные роботы в гибких
автоматизированных производствах для контроля параметров деталей в процессе
их
обработки; информационные подводные роботы – плавающие необитаемые
аппараты, снабженные измерительно-информационными и управляющими
устройствами и автоматической кинофотоаппаратурой для определения свойств дна
и воды, для обнаружения и опознавания предметов.
Основной отраслью применения робототехники является
машиностроительная промышленность, где применяется 85-90% всего мирового
парка роботов и манипуляторов. Наиболее крупным потребителем ПР является
автомобильная промышленность, где
используется более половины мирового
парка ПР, в основном для сварки и окраски. Второе место по масштабам
применения ПР в капиталистических странах занимает электротехническая
промышленность, в основном в операциях сборки изделий, третье место –
металлообрабатывающая промышленность. Согласно прогнозу в будущем
ожидается рост доли ПР в легкой промышленности.
Широкие перспективы по применению роботов
открываются в
непромышленных отраслях (в сельском хозяйстве, транспорте и др.). В США и
западноевропейских странах большее распространение имеют универсальные (на
технические операции различных видов) ПР, а в России и Японии – специальные (на
8
18
определенные технические и конкретную модель технического оборудования ) и
специализированные (на технические операции одного вида и на определенную
группу моделей технического оборудования ) ПР.
Супервизорный и диалоговый режим управления являются
автоматизированными. Они применяются в роботах 2 и 3 поколений для придания
действиям большей адаптивности и интеллектуальности на основе «подключения»
человека в промежуточный (тактический) или верхний
(стратегический) уровни
иерархии управление. В супервизорном режиме управления человек вмешивается в
управление выдачей целеуказаний на основе визуального контроля за ходом
автоматического выполнения отдельных рабочих операций роботом.
Диалоговый режим управления отличается от супервизорного тем, что робот
не только принимает команды человека для их исполнения, но и сам активно
участвует в распознавании
обстановки и принятии решения, помогая в этом
человеку – оператору.
Число степеней подвижности определяется числом степеней свободы
кинематической цепи манипулятора ПР относительно базовой системы координат, а
также числом степеней свободы устройства передвижения робота. ПР с 4- 6
степенями подвижности составляет 55% в отечественном парке, против 69% в
зарубежном парке, а ПР с 8 степенями подвижности в мировом
парке составляют
всего 2%.
Управление по отдельным степеням подвижности может быть позиционным
(дискретным) или контурным (непрерывным). В позиционном управлении
программируется только последовательность точек, в которых должен
останавливаться рабочий орган, и порядок их прохождения. Частный случай
позиционного управления, при малом числе точек позиционирования (от 2 до 5) по
каждой степени подвижности, называется цикловым управлением
. В контурном
управлении программируется заданная траектория с установленным
распределением во времени значений скорости. Использование того или иного
способа управления связано с особенностями технологической операции,
используемым приводом, требуемым быстродействием, грузоподъемностью,
точностью позиционирования. Так, например, для окрасочных роботов и роботов
дуговой сварки необходимо контурное управление, которое значительно сложнее
позиционного.
В настоящее время
около 40% парка ПР в мире – это ПР с цикловым
управлением с пневматическим приводом, с грузоподъемностью до 15 кг. ПР с
гидравлическим приводом, допускающие любой тип управления, используют при
грузоподъемности, как правило, свыше 15 кг. В последнее время разработчики ПР
стали отдавать больше предпочтения электромеханическим приводам, достаточно
экономичным и удобным в эксплуатации. Характерной чертой
роста мирового парка
ПР является постоянное увеличение числа адаптивных роботов, не требующих
больших затрат на упорядочение объектов роботизации, на организацию
производства. Основной задачей в создании адаптивных ПР является
совершенствование систем очувствления, к которым относятся системы
технического зрения, локомоционные, силомоментные и тактильные системы.

19
В качестве примеров адаптивных роботов можно привести роботов: «МН-I»
(рис. 1.9а), «Шейки» (рис 1.9б), с супервизорным управлением (рис 1.9в) .
Первый действующий макет адаптивного робота (модель «МН-I») (рис. 1.9а)
был построен в 1961 г. в Массачусетском технологическом институте (МТИ)
аспирантом Г. Эрнстом под руководством К. Шеннона и М. Минского. В состав
этого
робота входила исполнительная рука – манипулятор и ЭВМ, осуществляющая
управление роботом [5,12].
Рис. 1.9 Адаптивные роботы:
а - робот МТИ "МН-1",
б - мобильный адаптивный робот "Шейки" (США),
в - робот с супервизорным управлением.
По командам ЭВМ включались, регулировались и выключались все
двигатели, приводящие руки в движение. Формируя эти команды, ЭВМ наряду с
сигналами программы использовала информацию от очувствленной руки (от ее

20
захвата) непосредственно в процессе ее движения. Захват показа на рис. 1.9а в
увеличенном масштабе: два его «пальца» оснащены специальными датчиками,
реагирующими на соприкосновение с объектами. Вся информация, собираемая
захватом в процессе движения руки, передается в ЭВМ, где она обрабатывается в
соответствии с заданной программой, согласно которой рука должна, например,
собрать разбросанные
в беспорядке кубики и сложить их в коробку.
Адаптивный робот «Шейки», созданный в 1969 г. в Стэнфордском
исследовательском институте (рис. 1.9,б), снабжен значительно более развитым
очувствлением. Помимо контактных датчиков, на нем установлены дальномер,
телекамера и специальная навигационная система, измеряющая пройденный
роботом путь. Подвижная система робота «Шейки» состоит из трехколесной
тележки с
независимым электроприводом на каждое колесо, управляемой ЭВМ. В
сочетании с механической рукой (как предусмотрено проектом) это – мобильный
адаптивный робот, обладающий по сравнению с рукой Эрнста значительно более
высоким уровнем автономного поведения в соответствии с более широкими
возможностями устройств очувствления.
В основе супервизорного управления лежит идея распределения функций
управления роботом между человеком
и ЭВМ. Робот с супервизорным управлением
(рис. 1.9в) включает в себя систему очувствления (тактильную, технического
зрения), исполнительную систему (манипулятор), ЭВМ и пульт оперативного
управления с видеоконтрольным устройством.
В настоящее время ведутся большие работы по совершенствованию систем
искусственного (технического) зрения, которые являются наиболее эффективным
средством очувствления адаптивных роботов. Согласно прогнозам в
ближайшие 5-
10 лет основным классом парка промышленных роботов станут адаптивные и
интеллектуальные роботы.
Глава 2. Математическое описание роботов
2.1. Функциональная схема автоматического управления роботом
На рис.2.1 показана функциональная схема системы управления
манипулятором робота (пунктиром условно показаны внутренние обратные связи
систем управления отдельных приводов). Аналогично выглядит схема управления
движением шасси подвижного робота, но в этом случае в качестве объекта
управления вместо манипулятора выступает шасси с его приводами.
Цель рассматриваемой системы управления манипулятора - обеспечить
перемещение его
рабочего органа, т. е. изменение координат последнего Xp(t), в
соответствии с заданием G(t) при наличии возмущающих воздействий Mв.
Преобразователь П информации непосредственно воздействует на двигатели
манипулятора М
к
. Каждый двигатель (Д) манипулятора отрабатывает
составляющую программы, заданную для соответствующей степени подвижности.