Назаров Х.Н. Робототехнические системы и комплексы
Подождите немного. Документ загружается.

91
систему и драйверы) для организации обмена данными в режиме реального
времени.
Можно выделить три направления интеллектуализации мехатронных модулей
движения, которые классифицируются в зависимости от интерфейсных точек
интеграции.
1. Развитие интегративных интерфейсов, вызывающих управляющий
контроллер с компьютером верхнего уровня, единый аппаратно-программный
управляющий комплекс (интерфейс I1);
2. Создание интеллектуальных силовых модулей управления путем
интеграции управляющих контроллеров и силовых преобразователей (интерфейс
I2);
3. Разработка интеллектуальных сенсоров мехатронных модулей, которые
дополнительно к обычным измерительным функциям осуществляют
компьютерную обработку и преобразования сигналов по гибким программам
(интерфейс I3).
Для получения независимых координатных линейных перемещений на одном
многокоординатном мехатронном модуле они снабжаются совокупностью органов
схвата, управляемых раздельно. При
этом количество и место расположения органов
схвата (Ор с) зависит от числа и взаимного расположения органов регулирования
объекта.
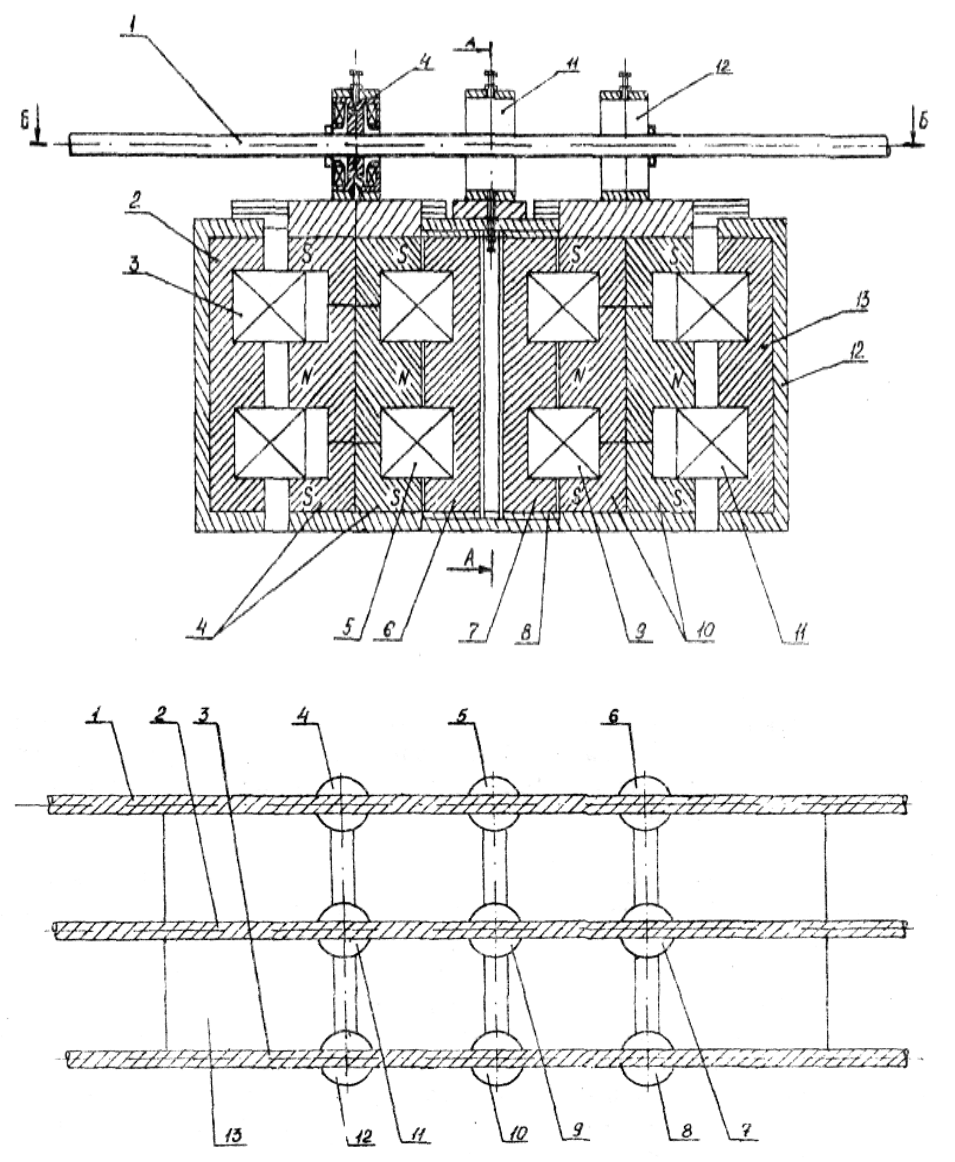
На рис.10.3 приведена конструкция многокоординатного мехатронного
модуля движения с тремя независимыми координатными линейными
перемещениями.
Электромагниты мехатронного модуля выполнены цилиндрически.
Подвижные сердечники выполнены из постоянных магнитов. На подвижных частях
модуля установлены рабочие органы схвата
Ор Сл1, Ор Сл2, Ор СлЗ, Op Cпl, Ор
Сп2, Ор СпЗ. Фиксирующие органы схвата Ор Сф1, Ор Сф2, Ор СфЗ прикреплены к
корпусу модуля.
Из рис.10.4 видно, что каждому трубчатому штоку 1,2,3, выполненному из
немагнитного материала, соответствуют по два рабочих Ор Ср (4 и 6, 7 и 11, 8 и 12)
и по одному фиксирующему ОрС(5,9 и 10).
Каждая группа однотипных ОрС имеет
жесткие механические связи, как это показано на рис. 10.4.
Подвижные части мехатронного модуля совершают возвратно -
поступательные перемещения вместе с расположенными на них тремя левыми и
правыми рабочими ОрС.
Управляющие сигналы поступают на каждый орган схвата раздельно, в
результате чего штоки 1,2,3 совершают независимые друг от друга координатные
перемещения
.
Направление координатных перемещений зависит от закона изменения
управляющих сигналов, поступающих от компьютерного управляющего устройства.
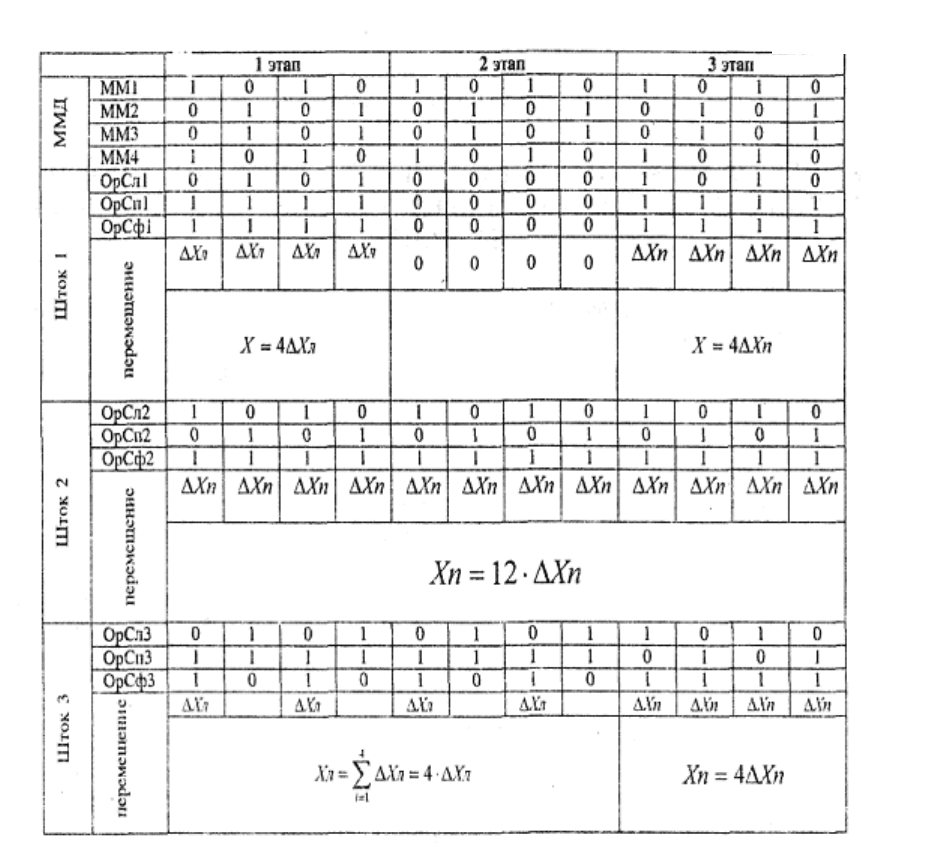
Принцип работы трехкоординатного мехатронного модуля поясняется с
помощью табл. 10.1.
Для каждого штока могут быть заданы различные законы перемещения.
Например, шток 1 совершает "линейное движение" влево - остановка - вправо, шток
2 - влево, шток 3 - влево со скоростью VI и вправо со скоростью
V2.
92
Рис. 10.3. Мехатронный модуль движения с тремя выходными координатами
Рис. 10.4. Трехкоординатный мехатронный модуль (вид сверху).
Рассматриваемый диапазон разделим на три этапа, каждый этап включает
четыре шага.
Шток 1 в первом этапе совершает четыре шага влево, во втором этапе
неподвижен, в третьем - четыре шага вправо. Величина одного шага равна
перемещению.
В табл.10.1 "1" соответствует ключевому состоянию обмоток схватов и
электромагнитов, а "О
" - включенному состоянию.
93
Шток 2 во всем диапазоне совершает перемещение вправо, равное 12.
Шток 3 в первом и во втором этапах перемещается влево со скоростью VI на
4, а в третьем этапе совершает перемещение вправо 4 со скоростью V2, причем
V2=2*V1.
Рассмотренным многокоординатным мехатронным модулем получены три
независимых координатных линейных движений.
В общем случае можно получить на одном МММД n - независимых
координатных линейных движений. При этом устанавливаются дополнительные
рабочие и фиксирующие ОрС.
Таким образом, интеллектуальные многокоординатные мехатронные модули
движения являются новым поколением исполнительных модулей роботов и
робототехнических систем, отличающимся широкими функциональными
возможностями [14].
10.6. Моделирование многокоординатных мехатронных модулей
робототехнических систем
Точность позиционирования и динамика манипулятора робота в основном
определяется динамическими характеристиками используемых в них модулей
Таблица 10.1
94
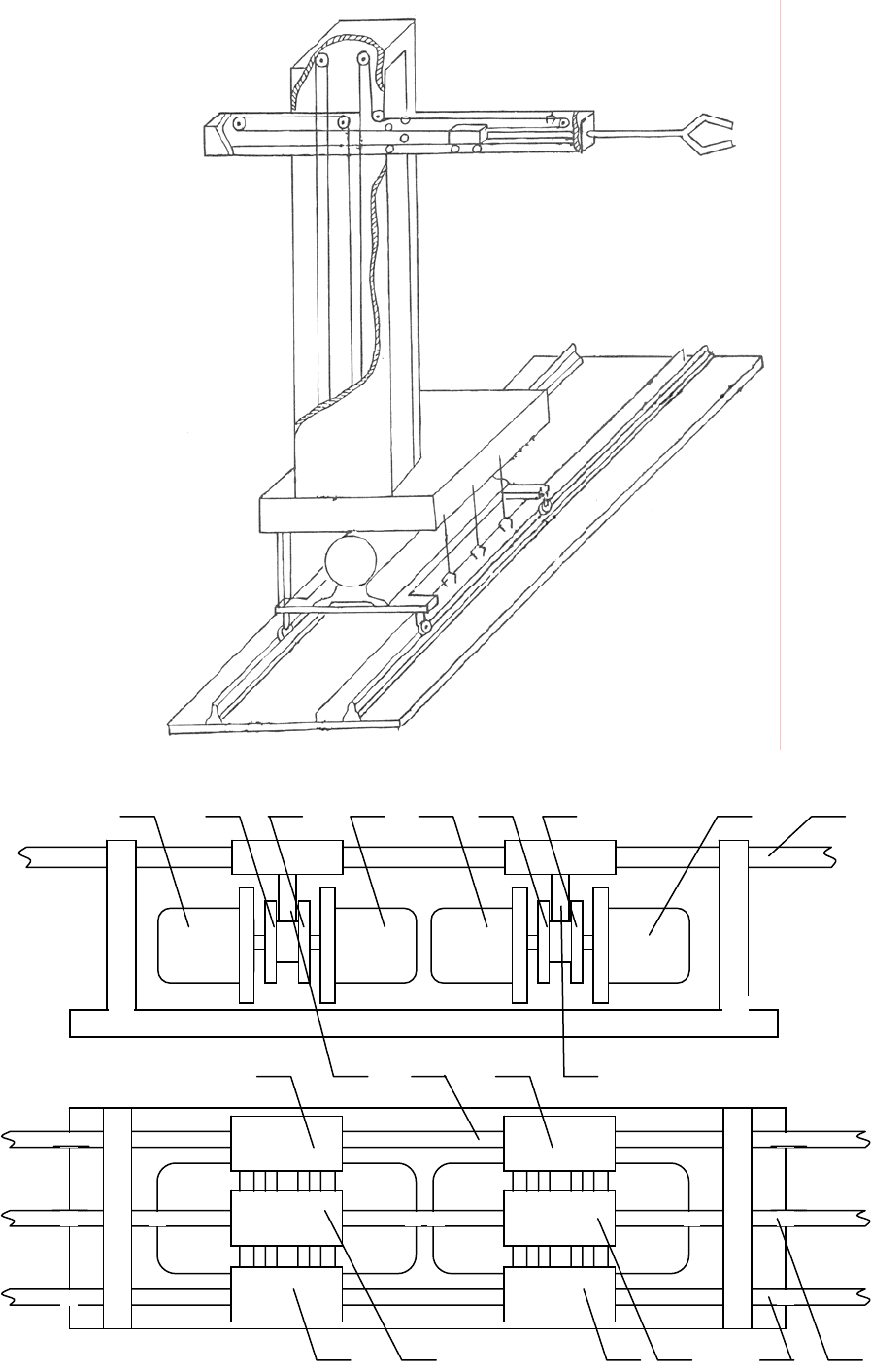
движения [18]. В разработанном промышленном роботе (ПР) [8], работающем в
прямоугольной системе координат в качестве приводов использован один
многовыходной модуль линейного движения, который обеспечивает три
независимых линейных перемещения и приводит в движение три степени
подвижности и расположен на основании робота (рис.10.5). Это позволило
существенно упростить кинематику и улучшить динамические характеристики
робота. С целью
исследования динамических характеристик многовыходного
мехатронного модуля движения (МММД), было осуществлено моделирование на
аналоговом вычислительном комплексе АВК-6. Моделирование на аналоговом
вычислительном комплексе позволяет проследить характер изменения исследуемых
величин и произвести их оценку [19].
Конструкция МММД с тремя выходами приведена на рис.10.6 и включает
четыре однотипных силовых электромагнита (1, 2, 3 и 4) броневого типа, якори
которых (16, 17, 18, 19)
образуют две подвижные части. К подвижным частям с
помощью планок 5, 6 жестко установлены три пары электромагнитных муфт (7, 8, 9,
10, 12, 11, 13), охватывающие два гибких штока (14, 15), выполненных в виде
замкнутого контура, и одного жестокого штока 9.
Задавая различные законы управления к электромагнитным муфтам (7, 8, 10,
12, 13) можно получить независимые законы движения штоков (9, 14, 15), а именно
– поступательные шаговые перемещения.
Назначением электромагнитных
муфт является обеспечение жесткого
сцепления штоков с подвижными частями МММД при их включении, т.е. при
подаче на их обмотки постоянного напряжения [8]. Электромагнитные муфты
выполняют функции механических ключей, передающих возвратно-поступательные
движения подвижных частей к штокам, поочередное включение и отключение
которых обеспечивают преобразование возвратно-поступательных движений в
поступательные перемещения.
МММД содержит
четыре однотипных силовых электромагнита (1, 2, 3, 4),
работающих синхронно попарно, т.е. в один момент времени работают крайние
электромагниты (1, 4) в другой момент времени - средние электромагниты (2, 3).
Конструкции электромагнитных муфт также однотипны и для уменьшения
времени их срабатывания обмотки управляются от форсирующих импульсов.
При моделировании на АВК-6 структурные схемы разрабатываются
одинаково, но с разными знаками
выходных величин (X(t), V(t), fЭМ(t)) в
зависимости от направления движения.
При включении обмоток электромагнитов 1 и 3 их якори перемещаются
влево, а при включении электромагнитов 2, 4 их якори перемещаются вправо. При
моделировании МММД условно примем положительным направлением
перемещения «вправо».
Электромагнитные муфты заменены механическими ключами (контактами)
релейных элементов, управляемых от распределителя импульсов (РИ). Законы
изменения последовательности импульсов
РИ определяют законы перемещения
штоков МММД. При моделировании МММД зададим следующие законы
перемещения штоков: шток 9 перемещается вправо, шток 14 - влево и шток 15 -
вправо со скоростью V/2, V – скорость перемещение штоков 9 и 14.
95
Рис.10.5. Промышленный робот на базе многокоординатного мехатронного модуля.
Рис.10.6. Конструкция многовыходного модуля линейного движения.
149 118107
5 12 61315
9 4 191892161 17
96
Принцип работы РИ, обеспечивающего эти законы изменения штоков
иллюстрируются таблицей состояний.
В таблице 10.2 логическое состояние «1» соответствует включенному
состоянию силовых электромагнитов СЭ1, СЭ2, СЭ3, СЭ4 и электромагнитных
муфт Мл7,Мп7, Мл8,Мп8, Мл10,Мп10, Мл11,Мп11, Мл12,Мп12, Мл13,Мп13
(индексы Л и П означают левую и правую части муфты [7]). Логическое
состояние
«0» соответствует включенному состоянию.
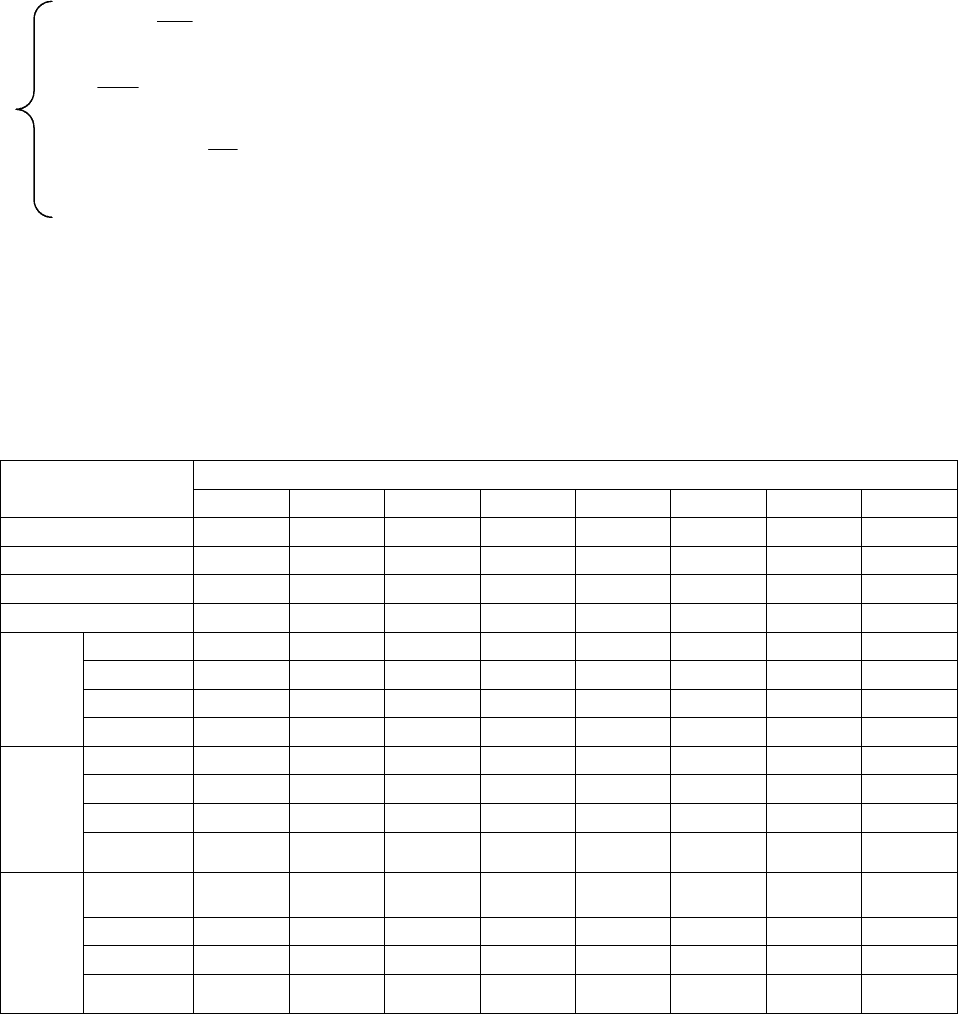
Математическую модель электромагнитов можно выразить с помощью
системы уравнений и зависимостей вида [2]:
dt
d
RiU
ψ
+⋅= ;
ПРЭМ
FF
dt
xd
m −==
2
;
dx
dL
iF
ЭМ
⋅⋅−=
2
5,0
;
),( Lif=
ψ
;
где U – постоянное напряжение, приложенное к обмотке электромагнита; i – ток
обмотки, R – сопротивление обмотки;
ψ
- потокосцепление, m – масса движущихся
частей; x – перемещение якоря; L – индуктивность; F
ЭМ
, F
ПР
– электромагнитная и
противодействующая силы, соответственно.
Таблица состояний
Таблица 10.2
ШАГИ Силовые
электромагниты
1 2 3 4 5 7 8 9
СЭ1 1 0 1 0 1 0 1 0
СЭ2 0 1 0 1 0 1 0 1
СЭ3 0 1 0 1 0 1 0 1
СЭ4 1 0 1 0 1 0 1 0
Мл7 1 0 1 0 1 0 1 0
Мп7 1 1 1 1 1 1 1 1
Мл8 0 1 0 1 0 1 0 1
ШТОК9
Мп8 1 1 1 1 1 1 1 1
Мл10 1 1 1 1 1 1 1 1
Мп10 0 1 0 1 0 1 0 1
Мл11 1 0 1 0 1 0 1 0
ШТОК14
Мп11 1 1 1 1 1 1 1 1
Мл12 1 0 1 0 1 0 1 0
Мп12 1 1 1 1 1 1 1 1
Мл13 1 1 1 1 1 1 1 1
ШТОК15
Мп13 1 1 1 1 1 1 1 1
В таблице 10.3 приведены значения исходных данных для моделирования
МММД, полученные при расчете магнитной системы (силового электромагнита) и
характеристика нагрузки электромагнитов (противодействующих сил). Для
97
получения этих значений были использованы следующие данные: напряжение на
зажимах обмотки силового электромагнита (U = 26В); сопротивление обмотки (R =
13 Ом); масса подвижной части (m = 2 кг); рабочий зазор (l = 0,4⋅10-2 М); масштаб
времени (Мt = 0,001).
Выбирая масштаб переменных, производится расчёт коэффициентов модели
МММД.
Таблица 10.3
x ⋅ 10
2
м
0 0,08 0,16 0,24 0,32 0,36 0,4
L, F
H
0,4 0,52 0,65 0,89 1,45 2,15 4,23
1/L, 1/F
H
2,5 1,92 1,54 1,12 1,69 0,47 0,24
dL/dx, F
H
14 7,7 12,8 25,1 69,1 150 620
F
ПР
(x), H
3 6 10 20 60 140 200
Структурная схема модели силового электромагнита МММД, построенной на
базе функциональных блоков АВК-6, приведена на рис.10.7.
6
a
2
1
x
K
4
K K
-1
+1
dn
K
K
2
4
x
K
-1
+1
K
1
K
K
3
dn
K
K
F=f(X
M
)
8
K
=f(X
M
)
9
d
x
dL
=f(I
M
)
5
L
1
d
x
dL
(X
M
)
L
1
f(X
M
)
+10B
-10B
dt
d
x
0
-X
M
U
M
=const
-X
M
F
EM
-F
P
F
EM
i
2
2
P
1
3
P
1
5
P
1
6
a
2
6
a
2
1
x
1
x
K
4
K
4
KK K
-1
+1
K
-1
+1
dn
KK
K
2
K
2
4
x
4
x
K
-1
+1
K
-1
+1
K
1
K
1
KK
K
3
K
3
dndn
KK
KK
F=f(X
M
)
8
F=f(X
M
)
8
KK
=f(X
M
)
9
d
x
dL
=f(X
M
)
9
d
x
dL
=f(I
M
)
5
L
1
=f(I
M
)
5
=f(I
M
)
5
L
1
d
x
dL
(X
M
)
d
x
dL
(X
M
)
L
1
f(X
M
)
L
1
f(X
M
)
+10B
-10B
dt
d
x
0
-X
M
U
M
=const
-X
M
F
EM
-F
P
F
EM
i
2
2
P
1
2
P
1
3
P
1
3
P
1
5
P
1
5
P
1
Рис.10.7. Структурная схема силового электромагнита МММД.
В этой модели для получения нелинейных зависимостей
() () ()
MПРМM
M
M
M
XFFиXf
dx
dL
Xf
L
==
⎟
⎠
⎞
⎜
⎝
⎛
=
⎟
⎠
⎞
⎜
⎝
⎛
,
1
использованы функциональные блоки 5, 9, 8, соответственно.
На базе структурной модели силового электромагнита разработана модель
МММД (рис.10.8) с тремя выходами, законы перемещения штоков которых
представлены в таблице 10.2, где электромагнитные муфты представлены
контактами электромагнитных реле 1, 2, 3, 4, 5, 6 с внешними уравнениями от РИ,
которые обеспечивают получение зависимости X = X∆М+x, где поступательное
движение штока ∆X – шаг, М – количество шагов, х
– мгновенное перемещение
последнего шага.
98
7
8
4
3
2
9
5
6
1 2 3 4
-x
x
x
x
x
7
8
44
33
22
99
55
66
1 2 3 4
-x
xx
xx
xx
xx
KM
KM
CM
CM
ÃÑÈ
ÝÊ
τ
ñ
ð
τ
ñ
ð
/2
τ
ñ
ð
/
2
На электронно-лучевом индикаторе наблюдается одновременно три сигнала
(X, -X, 0,5X); которые приведены на рис.10.9.
Рис.10.9. Временные характеристики МММД.
Следует отметить, что в результате моделирования многовыходного
мехатронного модуля линейного движения робототехнической системы на аналого-
вычислительном комплексе АВК-6 были исследованы динамические
характеристики модуля и определены возможные изменения его основных
характеризующих величин.
12
-8
-12
-4
8
4
0
X(MM)
20
40 60
t, T
10
-3
c
X
X/2
-X
ГСИ – генератор синхрон-
ных импульсов, ЭК – элек-
тронный коммутатор,
ЭЛИ – электронно-
лучевой индикатор.
Рис.10.8. Структурная
схема МММД.
99
Литература
1. Белянин П.Н. Робототехнические системы для машиностроения. Под ред. Е.П.
Попова. М.: Машиностроение, 1989. 276с.
2. Зенкевич С.Л. Управление роботами. М.: Изд-во МГТУ, 2000. 456с.
3. Робототехника и гибкие автоматизированные производства: Учебн. пособие
для втузов/под ред. И.М. Макарова. М.: Высш. шк., 1986. 159с.
4. Хасанов П.
Ф., Назаров Х.Н. Мобильные робототехнические системы.
Ташкент: ТашПИ, 1987. 96с.
5. Хасанов П.Ф., Киселев О.Д. Адаптивные роботы и системы технического
зрения: Учебн. Пособие. Ташкент: ТашПИ, 1986. 96с.
6. Hasanov P.F., Nazarov H.N. Intellectual models and tasks in the theory of robot
technique systems//Second World Conference on Intelligent Systems for Industrial
Intonation. T., 2002. 325 – 329p.
7. Хасанов П.Ф., Назаров Х.Н. Многовыходные модули для роботов и
робототехнических комплексов//Изв. Вузов СССР. Cер
. Приборостроение.
1990. №10. с21-25.
8. Хасанов П.Ф., Назаров Х.Н. Промышленный робот. А.С. СССР. №1598380,
1991г.
9. Хасанов П.Ф., Назаров Х.Н. Электромагнитный линейный двигатель. А.С.
СССР, №1470146, 1989.
10. Тимофеев А.В. Адаптивные робототехнические комплексы. Л.:
Машиностроение, 1988. 332с.
11. Робототизированные производственные комплексы/Ю.Г. Козырев и
др.; Под.
ред. Ю.Г. Козырева. М.: Машиностроение, 1987. 272с.
12. Козырев Ю.Г. Промышленные роботы: Справочник – М.: Машиностроение,
1988. 392с.
13. Назаров Х.Н., Якубов А. Моделирование многовыходных мехатронных
модулей движения робототехнических систем//Техника юлдузлари. Т.: изд-во
ТашГТУ, 2002. №4. б30-35.
14. Назаров Х.Н., Исакулов Р.М. Интеллектуальные многокоординатные
мехатронные
модули движения робототехнических систем//Вестник ТашГТУ
2003, №2. с 23-27.
15. Назаров Х.Н., Жураев Р., Якубов А.Б. Робототехник тизимлар электромагнит
мехатрон ќаракат модулларининг морфологик ва граф моделлари //Вестник
ТашГТУ 2003. №3 с33-37.
16. Рихсибаев П.И., Назаров Х.Н. Расчет характеристик электромагнитных
многокоординатных мехатронных модулей движения робототехнических
систем // Техника юлдузлари, 2003. №3
с47-52.
17. Назаров Х.Н., Жураев Р. Управление роботами. Методические указания по
лабораторным роботам. Ташкент: ТашГТУ, 2003. 46с.
18. Подураев Ю.В. Основы мехатроники. М.: МГТУ «СТАНКИН», 2000. 101с.
19. Назаров Х.Н., Якубов А. Моделирование многовыходных мехатронных
модулей движения робототехнических систем//Техника юлдузлари. ТашГТУ,
2002. №4. с30-35.
100
20. Гибкие производственные системы, промышленные роботы, робото-
технические комплексы. Под ред. Б.И. Черпакова. М.: Высш. шк., 1989. 95с.