Murray J.D. Mathematical Biology: I. An Introduction
Подождите немного. Документ загружается.

266 8. BZ Oscillating Reactions
x = x
1
, x = x
2
; y = y
1
, y = y
2
; z = z
1
, z = z
2
enclosing the steady state (x
s
, y
s
, z
s
) in (8.7) . Let us first determine the planes x = x
1
and x = x
2
where 0 < x
1
< x
s
< x
2
.Leti, j and k be the unit normals in the positive
x, y and z directions. On x = x
1
, n =−i and (8.19) requires
−i ·
dr
dt
x=x
1
=−
dx
dt
x=x
1
< 0 ⇒ qy − xy + x − x
2
x=x
1
> 0.
Since, from (8.4), 0 < q 1, and assuming x
1
= O(q), the last inequality requires x
1
to satisfy
y(q − x
1
) + x
1
− x
2
1
≈ y(q − x
1
) + x
1
> 0forally
1
≤ y ≤ y
2
.
So, at the least, a natural boundary for x < x
s
is x
1
= q, which we choose as a first
approximation. Then on x = x
1
= q,
−i ·
dr
dt
x=x
1
=q
=−
q(1 − q)
ε
< 0ifq < 1.
On x = x
2
, n = i and (8.19) now requires
i ·
dr
dt
x=x
2
=
dx
dt
x=x
2
< 0 ⇒[y(q − x) + x − x
2
]
x=x
2
< 0.
If we choose x
2
= 1, we get
i ·
dr
dt
x=x
2
= ε
−1
y(q − 1)<0ifq < 1, for all y > 0.
With x
s
as given by (8.7) a little algebra shows that
q = x
1
< x
s
< 1ifq < 1.
With typical values for the parameters these conditions are satisfied.
Consider now the planes z = z
1
and z = z
2
,wherez
1
< z
s
< z
2
.Onz = z
1
,
n =−k and (8.19) requires
−k ·
dr
dt
z=z
1
=−
dz
dt
z=z
1
=−(x − z)]
z=z
1
< 0
and since, on the boundary S, x ≥ x
1
we have a natural lower boundary for z of z =
z
1
= q. Strictly z
1
should be just less than q since x
1
= q.Nowonz = z
2
, n = k and
we require
k ·
dr
dt
z=z
2
< 0 ⇒ (x − z)]
z=z
2
< 0.
8.3 Nonlocal Stability of the FKN Model 267
Since x ≤ 1, an upper boundary for z is z = z
2
= 1; again we should have z
2
just
greater than 1.
Finally let us consider the planes y = y
1
and y = y
2
where y
1
< y
s
< y
2
.On
y = y
1
, n =−j and (8.19) requires
−j ·
dr
dt
y=y
1
=[y(q + x) −2 fz]
y=y
1
< 0
and so we must have
y
1
<
2 fz
q + x
for all q ≤ x ≤ 1andq ≤ z ≤ 1.
So,
y
1
<
2 fq
q + 1
=
2 fz
minimum
1 + x
maximum
.
Thus, an appropriate lower boundary for y is
y
1
=
2 fq
q + 1
.
When y = y
2
, n = j and we need
j ·
dr
dt
y=y
2
< 0 ⇒ 2 fz− y(q + x)]
y=y
2
< 0
which implies
y
2
>
2 fz
q + x
for all q ≤ x ≤ 1andq ≤ z ≤ 1
and so we can take
y
2
=
2 fz
maximum
q + x
minimum
=
f
q
.
Again using (8.4), for typical values of q and f , y
1
< y
s
< y
2
.
Finally we have (8.19) satisfied on the surface S of the rectangular box given by
x = q, x = 1; y =
2 fq
q + 1
, y =
f
q
; z = q, z = 1 (8.20)
within which the steady state (8.7) lies if f and q satisfy certain inequalities, which are
indeed satisfied by the parameter values in the Belousov–Zhabotinskii reaction.
268 8. BZ Oscillating Reactions
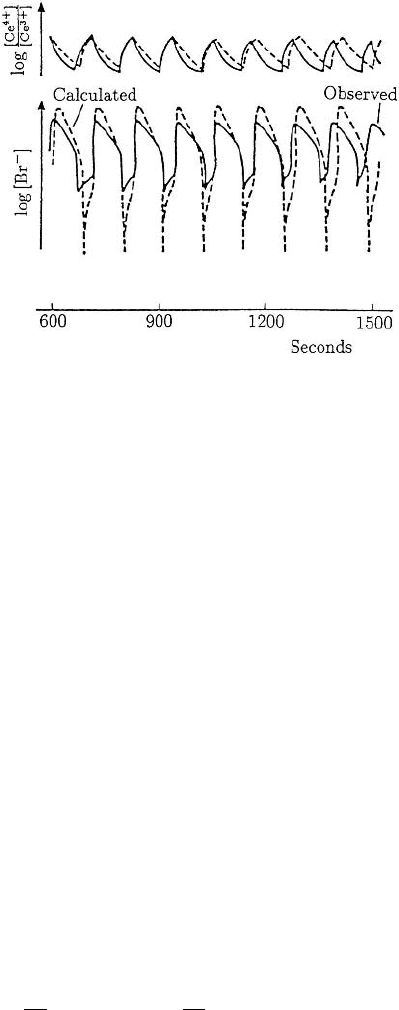
Figure 8.2. Comparison of the observed oscillations in the BZ reaction with the numerically computed so-
lution of the limit cycle solution of the model FKN system (8.5) with f = 0.3, δ = 1/3, q = 5 × 10
−3
,
ε = 0.01. (Redrawn from Tyson 1977)
This bounding surface could be refined to give more accurate bounds on any so-
lutions of (8.5). Since the ultimate limit cycle solutions have to be found numerically,
or asymptotically as in the following section, all that is needed is a demonstration that
such a confined set exists.
Figure 8.2 shows the numerical solution of the system (8.5) as compared with the
observed oscillations.
8.4 Relaxation Oscillators: Approximation for the
Belousov–Zhabotinskii Reaction
If we look again at Figure 8.1 we see that certain parts of the cycle are covered very
quickly. This is particularly evident in the trace of the Br
−
ion where it suddenly rises
along DA and drops as quickly along BC. As we mentioned above when parts of a
limit cycle are traversed quickly in comparison with other parts it is often referred to as
a relaxation oscillator. What this means from a modelling point of view is that a small
parameter must be present in the differential equation system in a crucial place to cause
this rapid variation in the solution.
To be specific, and to show how we can exploit such behaviour, consider first the
simple relaxation oscillator
ε
dx
dt
= y − f (x),
dy
dt
=−x, 0 <ε 1, (8.21)
where f (x) is a continuous function such that, say, f (x) →±∞as x →±∞.The
classic example, where f (x) = (1/3)x
3
− x, is known as the Van der Pol oscillator.
8.4 Relaxation Oscillators 269
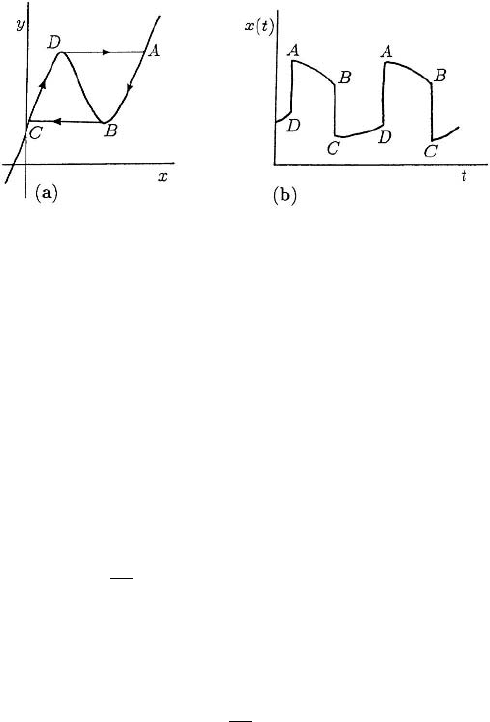
Figure 8.3. (a) Typical limit cycle phase trajectory ABCDA for a relaxation oscillator. The two horizon-
tal parts of the trajectory are traversed very quickly. (b) The solution x(t) corresponding to the limit cycle
trajectory in (a).
System (8.21) is a typical singular perturbation problem (see, for example, the book by
Murray 1984) since ε multiplies one of the derivatives. Figure 8.3(a) illustrates a typ-
ical limit cycle phase plane trajectory for (8.21), with Figure 8.3(b) the corresponding
solution x(t).
From the first of (8.21), except where y ≈ f (x), x changes rapidly by O(1/ε).So,
referring now to Figure 8.3(a), along DA and BC, x(t) changes quickly. Along these
parts of the trajectory the appropriate independent variable is τ = t/ε rather than t.
With this transformation the second of (8.21) becomes, as ε → 0,
dy
dτ
=−εx ⇒ y ≈ constant,
as it is on DA and BC in Figure 8.3(a). From (8.21), along the null cline y = f (x)
between AB and CDthe second equation becomes
f
(x)
dx
dt
≈−x (8.22)
which can be integrated to give x implicitly as a function of t.If f (x) is the Van der Pol
cubic above, or can be reasonably approximated by a piecewise linear function, then we
can integrate this equation exactly. We can then estimate (which we do in detail below)
the period T of the oscillation since the major contribution comes from the time it takes
to traverse the branches AB and CD: the time to move across DA and BC is small,
o(1). It can be shown that if T is the limit cycle period calculated in this manner from
(8.22), then the asymptotic limit cycle period of (8.21) has a correction of O(ε
2/3
).For
our purposes all we need is the O(1) approximation for T .
By way of example, suppose f (x) = (1/3)x
3
− x, that is, (8.21) is the simple Van
der Pol oscillator, and let us calculate the O(1) period T . The null cline y = f (x) here
and the limit cycle relaxation trajectory are very similar in shape to those illustrated
in Figure 8.3 except that the origin has been moved to a point halfway down DB in
Figure 8.3(a) and to a point in Figure 8.3(b) such that the solution is symmetrical about
the x = 0 axis. From the above analysis, on integrating from the equivalent of A to B

270 8. BZ Oscillating Reactions
in Figure 8.3(a) and from the equivalent of C to D,asε → 0 the period T to O(1) is
given by (8.22), with f (x) = (1/3)x
3
−x. A little algebra gives A as (2, 2/3) and B as
(1, −2/3). Because of the symmetry, and to be specific if we take t = 0atA,theO(1)
period T is given by
1
2
x −
1
x
dx =−
T/2
0
dt ⇒ T = 3 −2ln 2. (8.23)
Note that even if we cannot integrate f
(x)/x simply, to get the period, we can still
determine the maxima and minima of the limit cycle variables simply from the algebra
of the null clines y = f (x). These correspond to A and C for x(t) and D or A and B
or C for y(t).
On comparing the bromide ion concentration [Br
−
] as a function of time in Fig-
ure 8.1 and the limit cycle time-dependent solution sketched in Figure 8.3(b) it is rea-
sonable to look for a relaxation oscillator type of approximation for the BZ oscillator.
This has been done by Tyson (1976, 1977) whose analysis we effectively follow in the
next section.
Let us again consider the FKN mechanism in the dimensionless form (8.5); namely,
ε
dx
dt
= qy − xy + x(1 − x),
δ
dy
dt
=−qy − xy + 2 fz,
dz
dt
= x − z,
(8.24)
with the dimensionless parameters given by (8.4). Note that ε δ, in which case we
can reduce the order of the system (8.24) by setting ε dx/dt ≈ 0. This gives
0 = qy − xy + x(1 − x) ⇒ x = x(y) =
1
2
(1 − y) +[(1 − y)
2
+4qy]
1/2
.
(8.25)
With this (8.24) reduces to the second-order differential equation system in y and z:
δ
dy
dt
= 2 fz− y[x(y) +q],
dz
dt
= x(y) − z,
(8.26)
which of course can now be analyzed completely in the (y, z) phase plane. We can,
in the usual way, determine the steady state, analyze the linear stability, show there is
a confined set and hence determine the conditions on the parameters for a limit cycle
solution to exist.
8.5 Limit Cycle Oscillation Relaxation Model Analysis 271
8.5 Analysis of a Relaxation Model for Limit Cycle Oscillations in
the Belousov–Zhabotinskii Reaction
Here we exploit the relaxation oscillator aspects of (8.26) and hence determine the ap-
proximate period of the limit cycle, the maxima and minima of the dependent variables
and then compare the results with the experimental observations of the oscillating re-
action. To do this we first give approximations for x(y) using the fact that 0 < q 1
from (8.4), and then sketch the null clines.
From (8.25), with q 1, the z-null cline from (8.26) is
z = x(y) ≈
1 − y
qy
y −1
for
q 1 − y ≤ 1
q y − 1
. (8.27)
The y-null cline, from (8.26), is
z =
y[x(y) + q]
2
≈
y(1 − y)
2 f
y
qy
y−1
+q
2 f
qy
f
for
q 1 − y 1
q y − 1
y 1
. (8.28)
The z-null cline is a monotonically decreasing function of y; it is sketched in Figure 8.4.
The y-null cline, also shown in Figure 8.4 for various ranges of f , has a local maximum,
z
max
(= z
D
= z
A
in Figure 8.4(a))
z
max
=
1
8 f
at y
max
=
1
2
, (8.29)
obtained from the first of (8.28). From the second of (8.28), z has a local minimum, z
min
(= z
B
= z
C
in Figure 8.4(a)) at
dz
dy
=
q
2 f (y − 1)
2
{2y
2
−4y +1}=0
⇒ y
min
=
2 +
√
2
2
,
⇒ z
min
=
q(1 +
√
2)
2
2 f
=
q(3 + 2
√
2)
2 f
.
(8.30)
The values of z and y at the relevant points A, B, C and D are obtained from (8.27)
and (8.28), with z
D
(= z
A
) and y
D
given by (8.29) and z
B
(= z
C
) and y
B
from (8.30).
For y
C
, we have from the first of (8.28), with q 1andz
C
= z
min
from (8.30),
272 8. BZ Oscillating Reactions
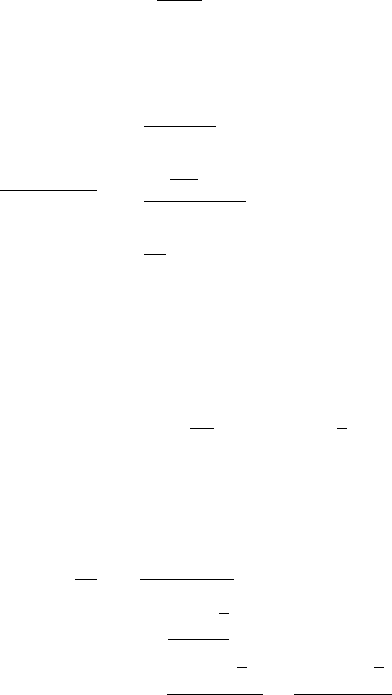
Figure 8.4. Schematic null clines for the reduced BZ model system (8.26) using the asymptotic forms for
0 < q 1 from (8.27) and (8.28). The points B and C correspond to z
min
given by (8.30) and the points
D and A to z
max
in (8.29). The asymptotic expressions for A, B, C and D are gathered together in (8.31)
below. Note how the position of the steady state changes with f :(a)1/4 < f <(1 +
√
2)/2; (b) f < 1/4;
(c) (1 +
√
2)/2 < f .
z
C
=
y
C
(1 − y
C
)
2 f
⇒ y
C
=
1 −[1 −8 fz
C
]
1/2
2
≈
1 −[1 −4q(3 + 2
√
2)]
1/2
2
≈ q(3 +2
√
2).
For y
A
, we have, from the second of (8.27) for y large, z ∼ qy/f ,andz
A
= z
max
from
(8.29),
1
8 f
= z
A
≈
qy
A
f
⇒ y
A
≈
1
8q
1.
Gathering together these results, and those from (8.29) and (8.30), we have, for the
points ABCD in Figure 8.4(a),
y
A
≈
1
8q
, z
A
=
1
8 f
; y
B
≈
2 +
√
2
2
, z
B
≈
q(3 + 2
√
2)
2 f
;
y
C
≈ q(3 +2
√
2), z
C
≈
q(3 + 2
√
2)
2 f
; y
D
≈
1
2
, z
D
≈
1
8 f
.
(8.31)
8.5 Analysis of a Relaxation Model for Limit Cycle Oscillations 273
Figures 8.4(a) to (c) illustrate the various null cline possibilities for the reduced BZ
model (8.26). From (8.27), (8.28) and (8.31) we can get the f -ranges where each holds.
Figure 8.4(b) is when the local maximum at z
D
lies to the right of the steady state. This
requires that on the z-null cline, given by (8.27),
z]
y=y
D
< z
D
⇒ x(y
D
) ≈ 1 − y
D
< z
D
⇒ f <
1
4
, (8.32)
on using (8.31). Figure 8.4(a) holds when z on the z-null cline is such that
z]
y=y
D
> z
D
and z]
y=y
B
< z
B
,
which gives
x(y
D
) ≈ 1 − y
D
>
1
8 f
and x(y
B
) ≈
qy
B
y
B
−1
<
q(3 + 2
√
2)
2 f
,
which reduces to
1
4
< f <
1 +
√
2
2
. (8.33)
Finally Figure 8.4(c) holds when, on the z-null cline,
z]
y=y
B
> z
B
⇒ f >
1 +
√
2
2
. (8.34)
We know from Chapter 7 that Figure 8.4(a) is a case in which a limit cycle oscilla-
tion is possible. So, with f in the range (8.33) and the steady state unstable, the reduced
BZ model system (8.26) will exhibit limit cycle solutions. Now comparing Figure 8.4(a)
with the relaxation limit cycle oscillator in Figure 8.3(a) gives the O(1) period of the
oscillatory solution of (8.26) for 0 <δ 1as
T ≈
AB
dt +
CD
dt =
z
B
z
A
+
z
D
z
C
dz
dt
−1
dz (8.35)
with dz/dt given by (8.26). So,
T
AB
=
z
B
z
A
[x(y) − z]
−1
dz. (8.36)
To get an exact evaluation to O(1) for q 1, it is convenient to change the variable
to y, with z as a function of y given by the second of (8.28), since AB is part of the
y-null cline. It is a tedious integration. All we want here is a reasonable approximation
to the period. So, using the expressions for q 1 in (8.27), we have, along most of
AB,
x(y) ≈
qy
y −1
∼ q,
274 8. BZ Oscillating Reactions
and so, using (8.31),
T
AB
=
z
B
z
A
(q − z)
−1
dz = ln
z
A
−q
z
B
−q
∼ ln
1
8 f
q(3+2
√
2)
2 f
−q
∼−ln [4(3 −2 f + 2
√
2)q], q 1.
(8.37)
This, in fact, is an upper bound for T
AB
since on AB, x(y) ≈ qy/(y − 1),which
asymptotes to q only for y 1. On AB, x(y) goes from
x(y
A
) =
q
1
8q
1
8q
−1
∼ q + O(q
2
), q 1,
to
x(y
B
) =
q
2+
√
2
2
2+
√
2
2
−1
= q(1 +
√
2).
Returning to the integral in (8.36) we have T
AB
bounded above by (8.37) and below by
the expression there with q(1 +
√
2) replacing q.Thatis,
ln [4(3 − 2 f + 2
√
2)q] < T
AB
< −ln [4(3 − 2 f + 2
√
2)(1 +
√
2)q]. (8.38)
Let us now evaluate the T
CD
contribution to the period in (8.35), namely,
T
CD
=
z
D
z
C
[x(y) − z]
−1
dz.
It is also convenient here to change to y as the integration variable. Between C and D
in Figure 8.4(a) and on CD
x(y) ≈ 1 − y, z ≈
y(1 − y)
2 f
⇒ dz =
1 −2y
2 f
dy
so the last integral gives, after some further tedious algebra,
T
CD
≈
y
D
y
C
1−2y
2 f
(1 − y) −
y(1−y)
2 f
dy
=−
4 f − 1
2 f − 1
ln
2
1/(4 f −1)
4 f − 1
4 f
.
(8.39)
8.5 Analysis of a Relaxation Model for Limit Cycle Oscillations 275
The period to O(1) for q 1 is then given as a function of f and q by T
AB
+ T
CD
,
using (8.38) and (8.39). The dimensional period is given by multiplying T by t
0
from
(8.4).
To complete the analysis of the relaxation oscillator we have to integrate the ap-
proximate equations on the branches AB and CD. We have effectively already done
this when we evaluated T
AB
and T
CD
.Letustaket = t
A
= 0 and hence z(0) = z
A
for algebraic convenience. Then on AB, with x(y) ∼ q for y large from (8.27), (8.26)
gives
dz
dt
≈ q − z ⇒ z(t) = z
A
e
−t
+q(1 −e
−t
), (8.40)
and so there is an exponential decay in time from z
A
to z
B
= O(q) for times of O(1).
On CD, x(y) ≈ 1 − y and z ≈ y(1 − y)/(2 f ) so the second of (8.26) on changing
to the variable y,gives
1 −2y
2 f
dy
dt
≈ (1 − y) −
y(1 − y)
2 f
which integrates to give y implicitly as a function of t from
ln
1 − y
(2 f − y)
4 f −1
= K +(2 f − 1)t, (8.41)
where K is an integration constant. Since the time to traverse the horizontal part of the
trajectory, namely, BC, is negligible, we can determine K by taking y(t
C
) = y
C
,where
t = t
C
≈ t
B
, with t
B
given by (8.40) on setting z = z
B
;thatis,
t
B
= ln
z
A
(1 − q)
z
B
−q
. (8.42)
From (8.41) and the last equation we thus have
K = ln
1 − y
C
(2 f − y
C
)
4 f −1
−(2 f − 1)t
B
. (8.43)
Now with y(t) given implicitly by (8.41), we get z from z ∼ y(1 − y)/(2 f ). Finally
the time to traverse DA is also negligible. We thus have analytical expressions for the
dependent variables in the relaxation oscillator as functions of time for 0 < q 1.
Let us now return to the actual BZ reaction and recall from (8.1) that z and y
are the dimensionless variables associated with the catalyst form Ce
4+
and bromide
ion Br
−
respectively. Referring to Figure 8.4(a) and starting at A, say, the limit cycle
oscillation trajectory then goes through BCD to A again. This trajectory corresponds
to the experimentally obtained cycle illustrated in Figure 8.1 with corresponding letters.
The [Br
−
] decreases exponentially to B, then there is a rapid drop to the value at C.The
value at B is the threshold Br
−
concentration described in Section 8.1 where process II
takes over from process I. There is then an increase in times O(1) from C to D,given