Мирошник И.В., Бобцов А.А. Теория автоматического управления
Подождите немного. Документ загружается.

Уравнения содержат n неизвестных С
i
, которые находятся одним из известных методов. Например, можно
переписать уравнение (2.24) в векторно-матричной форме
,
где , , .
и найти вектор-столбец неизвестных коэффициентов как
.
Если при некоторых значениях начальных условий имеет место тождество
=y*, ,
где y*= const , то значение y=y* называется равновесным значением выходной переменной (или положением
равновесия ) автономной системы [M1а]. В положении равновесия можно записать
(2.25) = y*, ,..., .
После подстановки (2.25) в уравнение [M1а] найдем
(2.26) a
n
y*=0.
При условии , что a
n
&nequal; 0 , получаем, что единственным положением равновесия рассматриваемой
системы является начало координат
(2.27) y*= 0,
а при a
n
= 0 находим бесчисленное множество равновесных значений.
Замечание 2 .1 . При условии, что вещественная часть некоторого вещественного или
комплексного корня p
i
строго отрицательна, т.е.
(2.28) ,
соответствующая составляющая переходного процесса со временем затухает:
.
Если условие (2.28) имеет место для всех , то затухающей является вся свободная составляющая:
(2.29) ,
причем предельное значение выходной переменной в точности совпадает с положение равновесия
автономной системы y* = 0.
2.2.3. Вынужденное движение. Вынужденная составляющая переходного процесса зависит от входного
воздействия и может быть аналитически определена только для ряда частных случаев, соответствующих
некоторым типовым входным сигналам. Наиболее распространенными сигналами являются единичный скачек, -
функция и гармоническое входное воздействие.
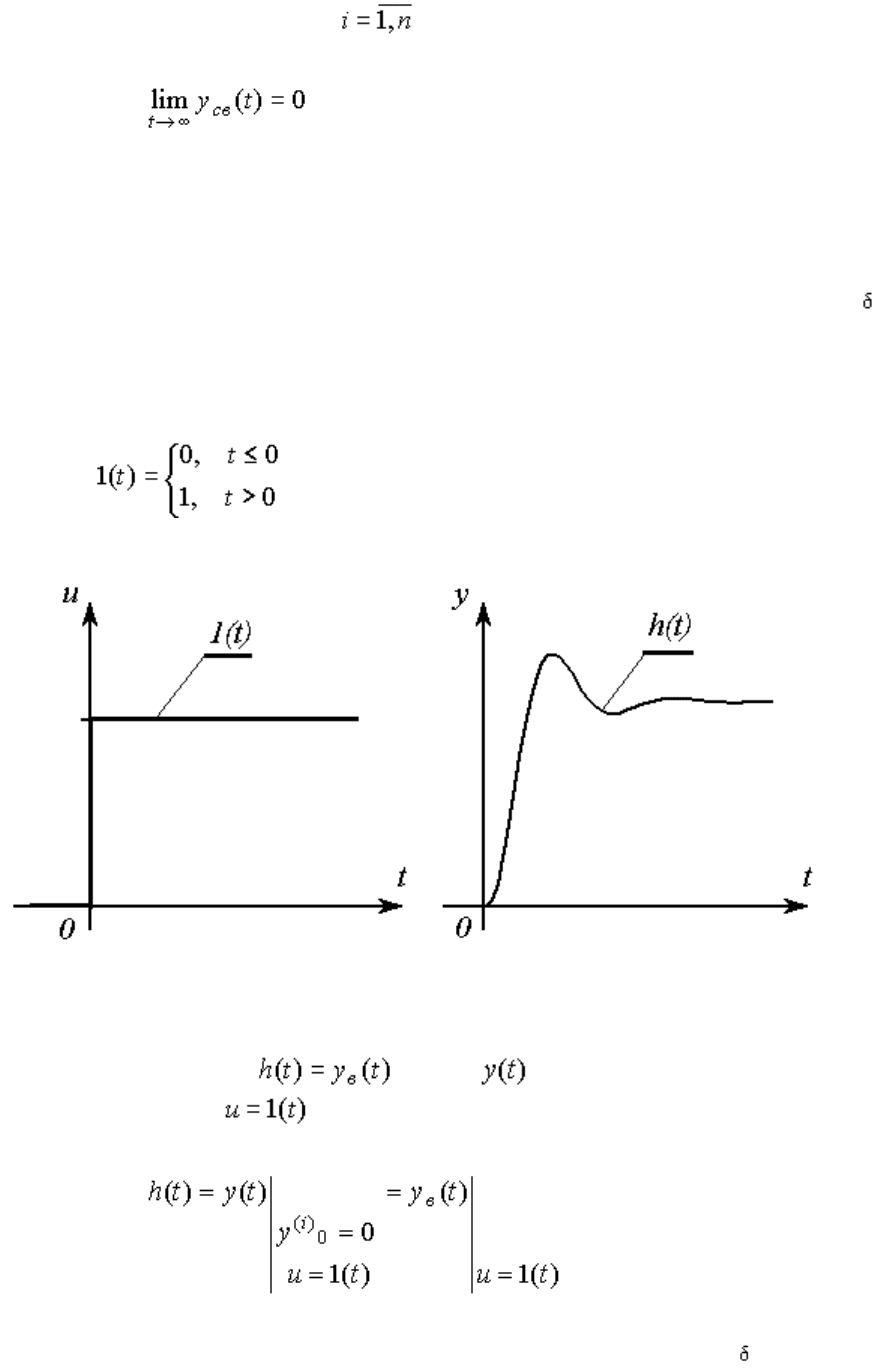
Рассмотрим реакцию систему на единичную ступенчатую функцию (единичный скачок)
,
Рис. 2.7. Единичный скачек и переходная функция
Вынужденная составляющая решения при воздействии на вход системы [M1]
единичной ступенчатой функции называется переходной функцией (характеристикой) системы, т.е.
(2.30)
Рассмотрим реакцию систему на единичную импульсную функцию (дельта-функцию) (t ). Последняя
определяется как
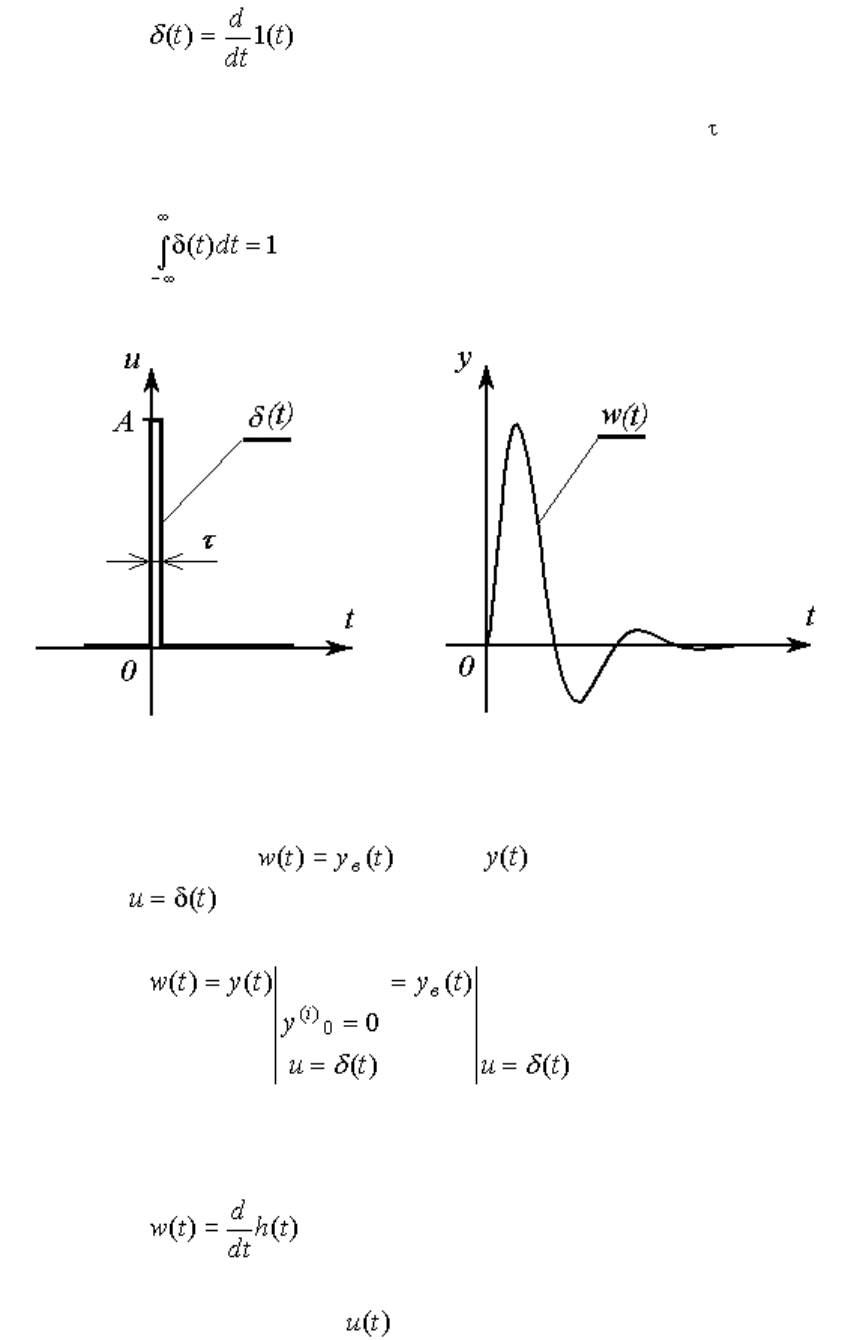
(2.31)
или импульс бесконечно большой амплитуды A и бесконечно малой длительности , удовлетворяющий
условию
(2.32) .
Рис. 2.8. Дельта-функция и весовая функция
Вынужденная составляющая решения при воздействии на вход системы [M1]
импульсной функции называется весовой функцией (характеристикой) системы, т.е.
(2.33)
Отметим, что, учитывая определение (2.33) нетрудно получить
(2.34) .
Для произвольного входного воздействия вынужденная составляющая переходного процесса системы
[M1] может быть найдена по формуле (интеграл свертки)
(2.35) .
В частном случае, когда (t), в силу свойства (2.34), найдем
.
Отметим, что в общем случае нахождение вынужденной составляющей переходного процесса с помощью
интегральных выражений типа (2.35) (см. также (2.42) в п. 3.2.1) вызывает затруднение. Значительно более
простой задачей является нахождение установившейся составляющей переходного процесса.
2.2.4. Установившееся движение. Движение системы, рассматриваемое при достаточно больших
значениях t ( ), называется установившимся режимом. Соответственно, установившейся составляющей
переходного процесса называется вынужденная составляющая при , т.е.
(2.36) .
Функция является частным решение уравнения [ М1 ] , полученном при определенных (обычно,
ненулевых) начальных условиях и зависящим от его правой части, т.е. входного воздействия .
Замечание 2.2. Часто используется следующая форма представления решения системы [M1]:
(2.37) ,
где - переходная составляющая, или общее решение уравнения [ М1 ] , которое может быть
найдено в форме аналогичной ( 2.20 ), т.е.
(2.38) ,
где C
i
' - постоянные коэффициенты.
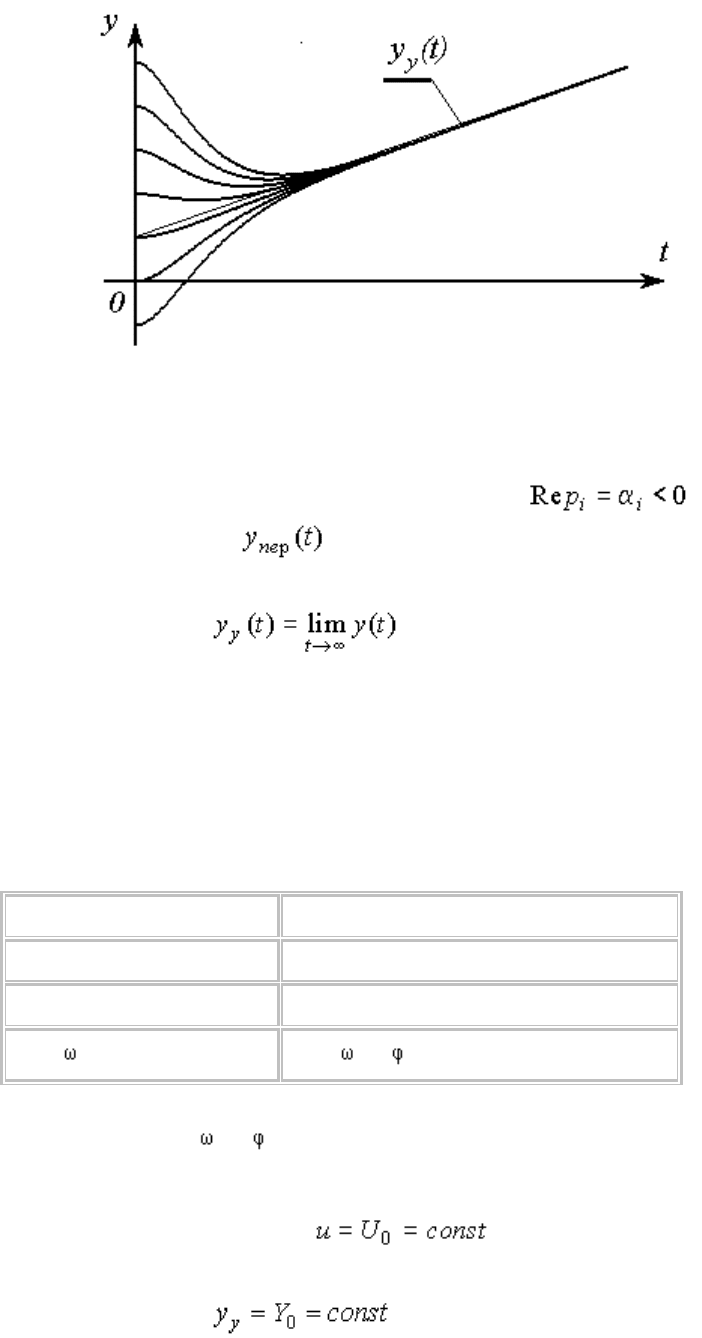
Рис. 2.9. Переходные процессы и установившаяся составляющая
При условии, что для всех значений p
i
выполняется (см. замечание 2.2), свободная
составляющая x
св
(а также ) затухает, т.е. имеет место выражение (2.29). Тогда
(2.39) ,
т.е. установившаяся составляющая соответствует переходному процессу системы в установившемся режиме.
С другой стороны, если одна из мод системы y
i
(t ), а следовательно и свободная составляющая в целом
неограниченно возрастают, то предела (2.39) не существует, и понятие установившегося режима теряет смысл.
Типовые частные решения линейного уравнения [M1], соответствующие установившимся составляющим
переходного процесса при воздействии на систему типовых входных сигналов u(t ), находятся по известным
правилам:
u(t) y
у
(t)
U
0
Y
0
U
0
+U
1
t Y
0
+Y
1
t
U
0
sin
0
t Ysin (
0
t+ )
где U
0
, U
1
,Y
0
,Y
1
, ;
0
, - постоянные.
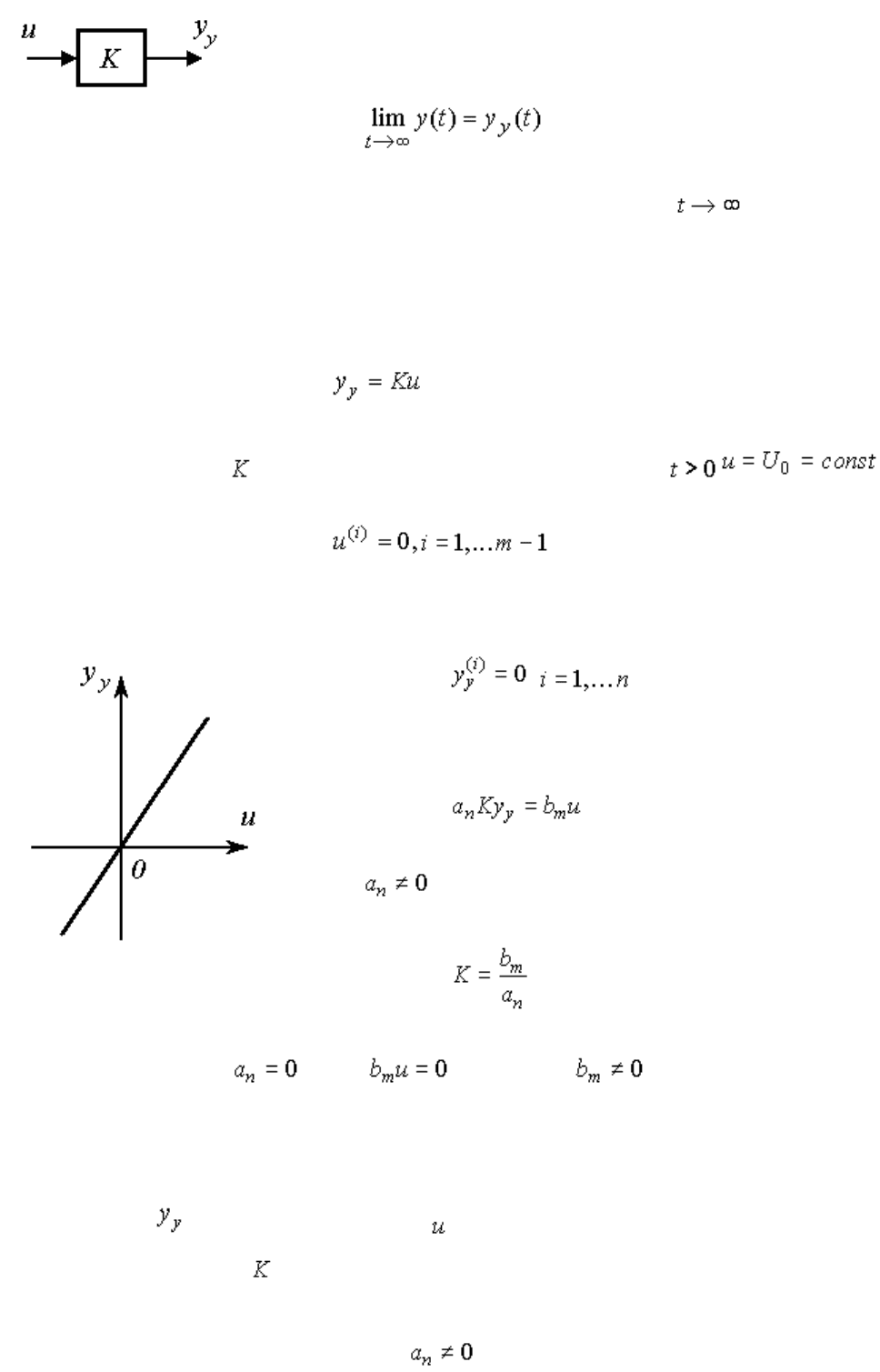
2.2.5. Статический режим. Наиболее важный частный случай решения системы [М1] соответствует
постоянному входному воздействию и установившейся составляющей
(2.40) .
Пусть свободная составляющая системы затухает, т.е. имеет место свойство (2.39) и, следовательно,
.
Последняя формула показывает, что при достаточно больших t ( ) в системе отсутствует движение,
т.е. имеет место статический режим работы.
Решение уравнения (2.39) в статическом режиме ищется в виде
(2.41) ,
где - неопределенный коэффициент. С учетом того, что при , запишем
(2.42) ,
а из уравнения (2.41) найдем, что
(2.43) , .
После подстановки (2.41)-(2.43) в [М1] получим простое алгебраическое выражение
(2.44) .
Пусть . Тогда неопределенный коэффициент K находится как
(2.45) .
При получим , где (см. п. 2.1) , т.е. в этом случае ( 2.44 ) не является частным
решением уравнения [M1].
Зависимость установившейся составляющей (выходной переменной после окончания переходного процесса)
от величины входного сигнала =const называется статической характеристикой динамической системы.
Для линейных систем вида [M1] статическая характеристика представлена уравнением прямой (2.41), где
постоянная , рассчитываемая по формуле (2.45), называется коэффициентом передачи или статическим
коэффициентом системы.
Система [M1], для которой и следовательно существует статическая характеристика называется
статической системой.
Астатической называется система, для которой и следовательно, не существует
статической характеристики, а установившийся режим невозможен.
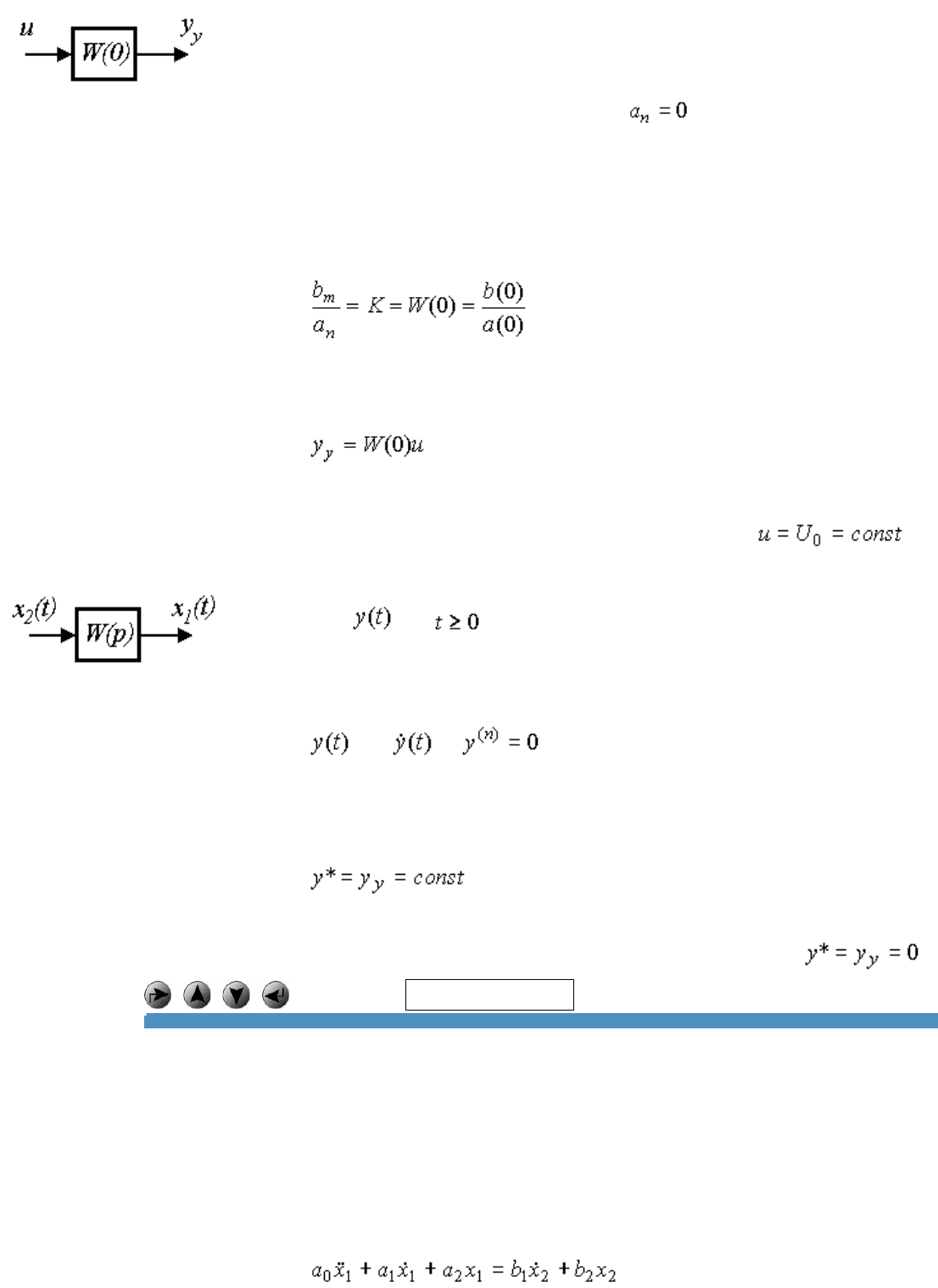
Определение статической характеристики сводится к элементарной операции нахождению статического
коэффициента K по формуле (2.45), где a
n
и b
m
- соответствующие коэффициенты дифференциального уравнения
[М1]. Однако статическая характеристика может быть получена и из операторной формы [М2] или [M3].
Сопоставляя (2.45) и [ М3 ] , найдем
(2.46) .
Следовательно, в статическом режиме система описывается уравнением
(2.47) .
Замечание 2.3. По аналогии с определением положения равновесия автономной системы, можно ввести
понятие равновесия возмущенной системы (2.40) при постоянном входном воздействии , т.е.
положения, в котором выполняется тождество
= y*,
и, следовательно,
(2.48) = y*, ,..., .
Нетрудно показать, что равновесное значение выходной переменной y* в точности совпадает с
установившимся значением, т.е.
(2.49) .
В частном случае при u=0 получаем автономную систему [M1а] и равновесное положение .
Уровень:
Элементарные звенья
Элементарными звеньями называются простейшие составные части (блоки) системы, поведение которых
описывается алгебраическими уравнениями или дифференциальными уравнениями 1-го - 2-го порядка:
(2.50) ,
где - выходная переменная, - входная переменная, -
постоянные коэффициенты (параметры). Уравнение (2.50) можно записать в операторной
форме:
,
т.е. передаточная функция звена имеет вид
(2.51) .
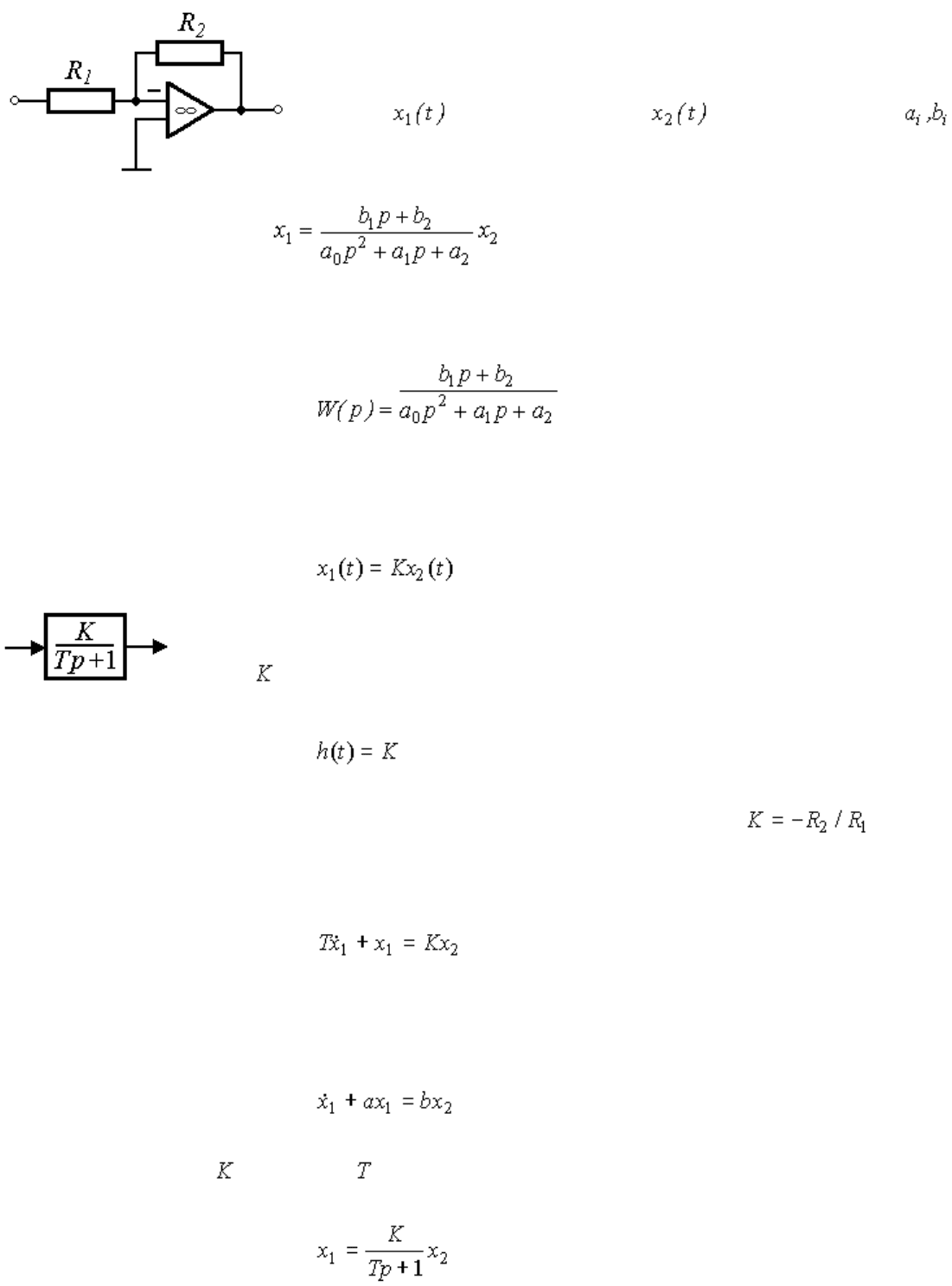
Пропорциональное (безинерционное) звено. Звено описывается алгебраическим уравнением
(2.52) ,
где - коэффициент пропорциональности, который (в силу отсутствия у блока инерционных свойств)
совпадает со статической характеристикой. Переходная функция пропорционального звена -
(2.53) .
Примеры: измерительные потенциометры, редукторы, усилители напряжения ( ) и т.д.
Апериодическое звено. Звено описывается дифференциальным уравнением
(2.54)
или, в приведенной форме - уравнением
(2.55) ,
где - коэффициент, - постоянная времени, a=K/T, b=1/K. Операторная форма звена имеет вид
(2.56)
или, соответственно,
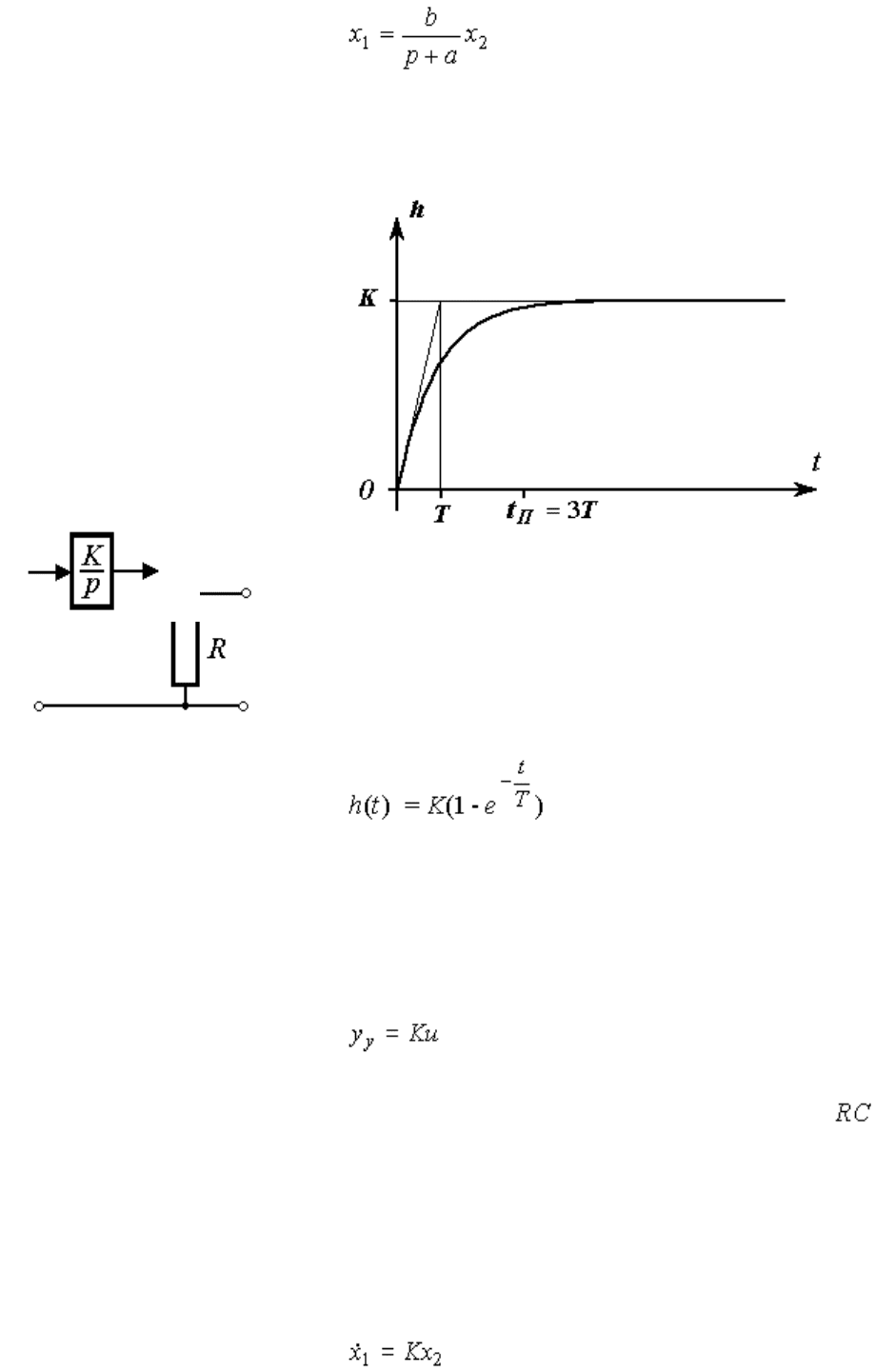
(2.57) ,
Переходная функция звена определяется выражением
Рис. 2.10. Переходная функция апериодического звена
(2.58) ,
а статическая характеристика -
(2.59) .
Примеры: усилители мощности, тепловые процессы, процесс разгона двигателя - цепь (см. пример 1.1),
LR цепь.
Интегрирующее звено. Звено описывается дифференциальным уравнением
(2.60)
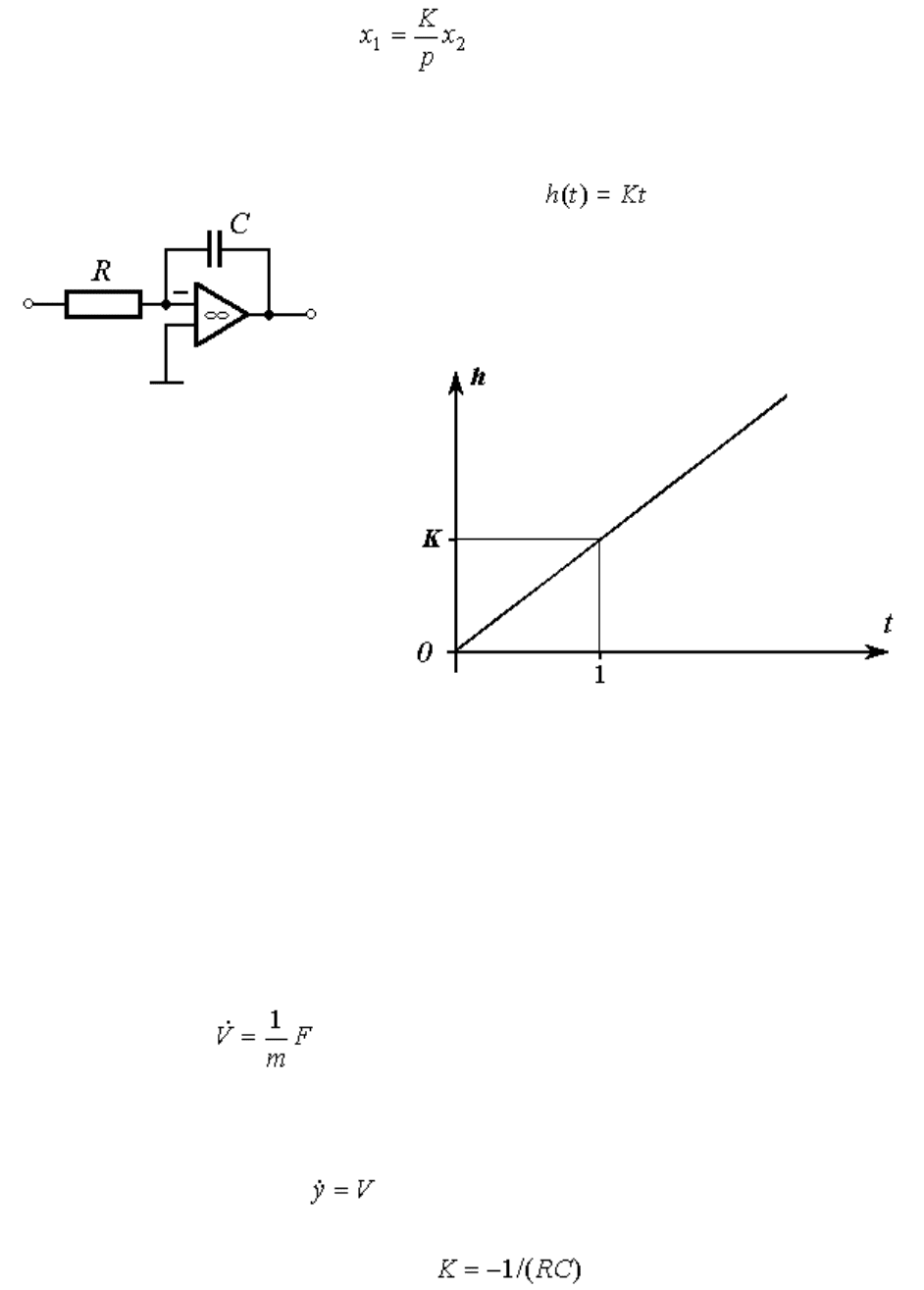
или, в операторной форме
(2.61) .
Переходная функция интегрирующего звена
(2.62) .
Звено относится к астатическим блокам и поэтому не имеет статической
характеристики.
Рис. 2.11. Переходная функция интегрирующего звена
Примеры: элементы механических систем (см. движение материальной точки, пример 2.3), описываемые
уравнениями динамики вида
,
и кинематическими уравнениями
;
электронные интеграторы ( ) и т.д.