Menke W. Geophysical Data Analysis: Discrete Inverse Theory
Подождите немного. Документ загружается.

168
10
Factor
Analysis
tion of a set of orthogonal factors. Even when the factors have no
obvious physical interpretation, the decomposition can be useful as a
tool for quantifying the similarities between the
si
vectors. This kind of
factor analysis is often called
empirical orthogonal function analysis.
As
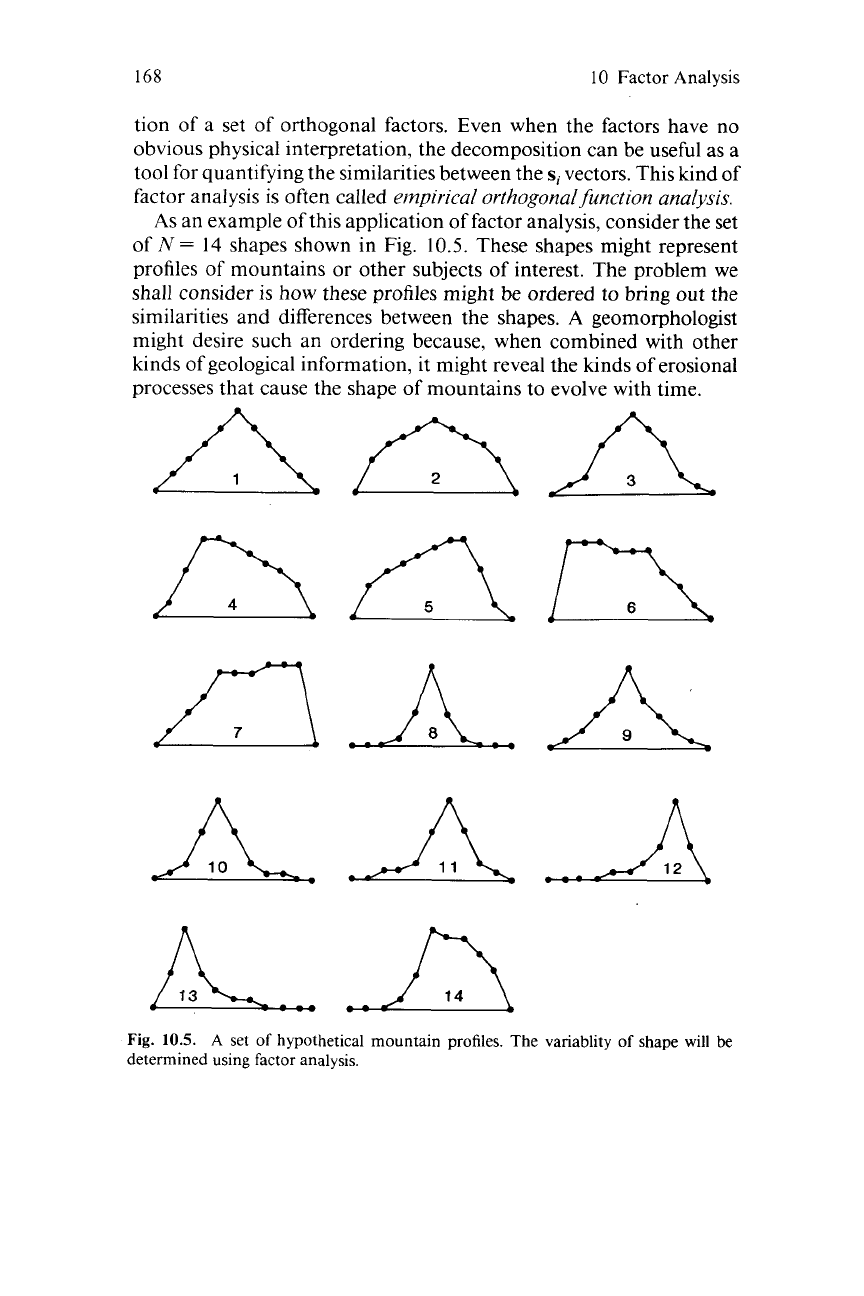
an example of this application of factor analysis, consider the set
of
N=
14
shapes shown in Fig.
10.5.
These shapes might represent
profiles of mountains or other subjects of interest. The problem we
shall consider
is
how these profiles might
be
ordered to bring out the
similarities and differences between the shapes.
A
geomorphologist
might desire such an ordering because, when combined with other
kinds of geological information, it might reveal the kinds of erosional
processes that cause the shape of mountains to evolve with time.
A
A
Fig.
10.5.
A
set
of
hypothetical mountain profiles. The variablity
of
shape
will
be
determined using factor analysis.
10.4
Empirical Orthogonal Function Analysis
169
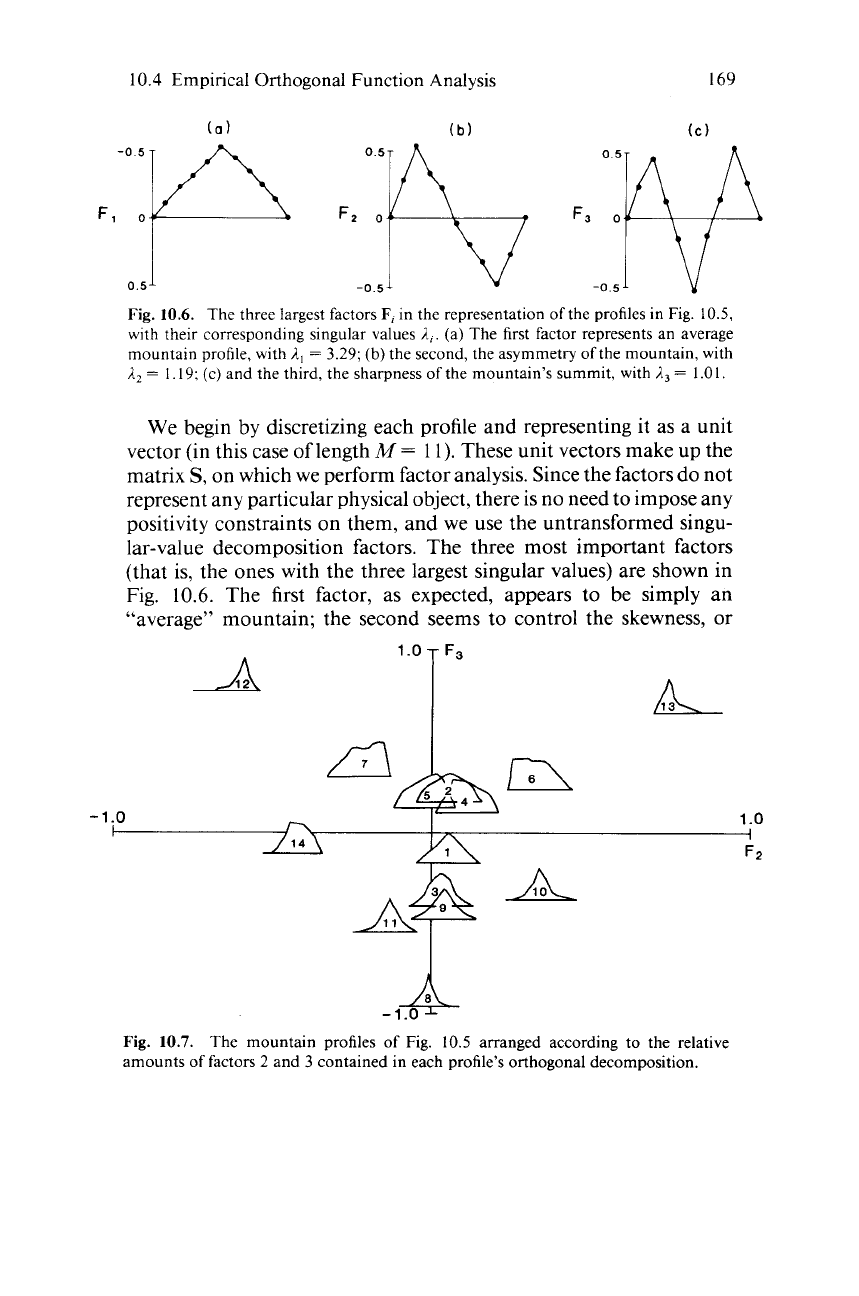
Fig.
10.6.
The three largest factors
F,
in the representation
of
the profiles in Fig.
10.5,
with their corresponding singular values
A,.
(a) The first factor represents an average
mountain profile, with
A,
=
3.29;
(b)
the second, the asymmetry
of
the mountain, with
I.,
=
1.19:
(c) and the third, the sharpness of the mountain’s summit, with
/I,
=
I
.O
I.
We begin by discretizing each profile and representing it as a unit
vector (in this case of length
A4
=
1
1).
These unit vectors make up the
matrix
S,
on which we perform factor analysis. Since the factors do not
represent any particular physical object, there is no need to impose any
positivity constraints on them, and we use the untransformed singu-
lar-value decomposition factors. The three most important factors
(that is, the ones with the three largest singular values) are shown in
Fig.
10.6.
The first factor, as expected, appears to be simply an
“average” mountain; the second seems to control the skewness, or
A
1.0
Fa
T
-1.0
1
.o
I
1
F2
n
14
-1.0
-4-
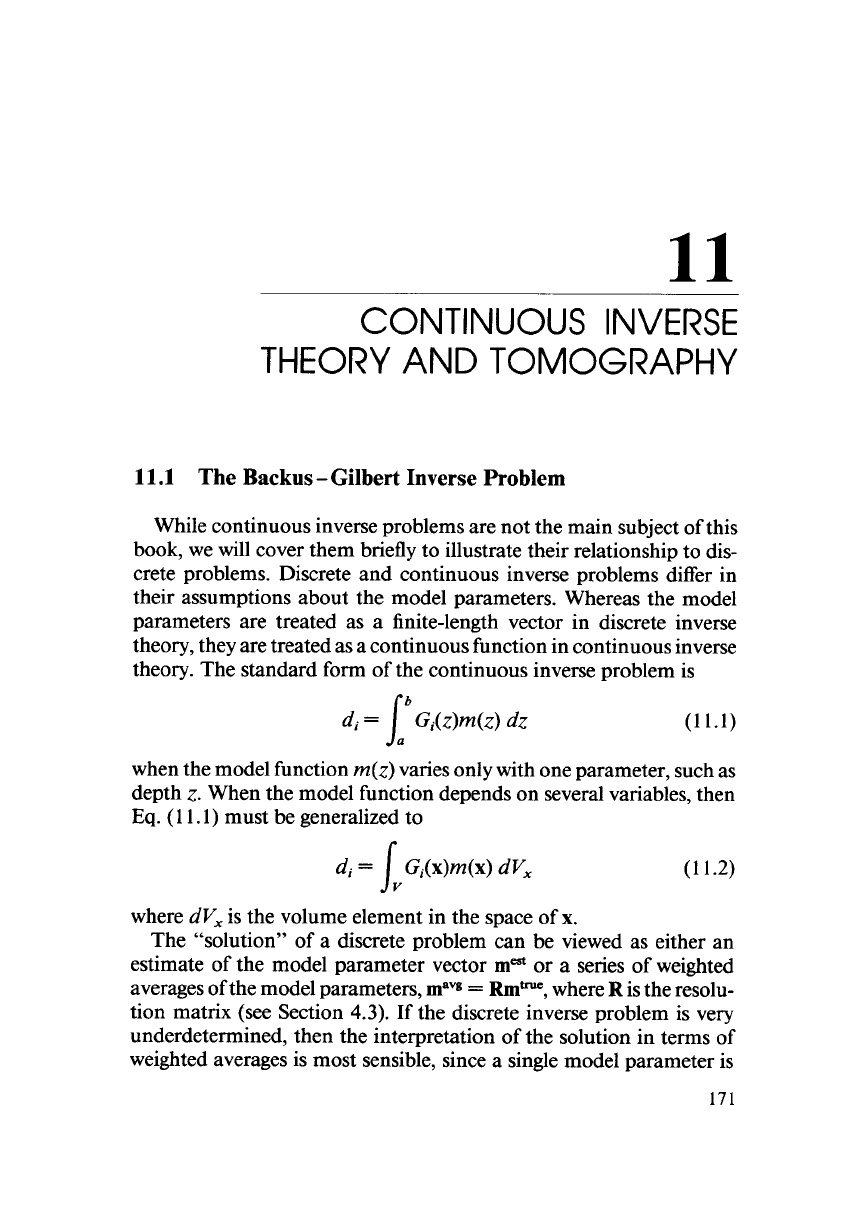
Fig.
10.7.
The mountain profiles
of
Fig.
10.5
arranged according to the relative
amounts of factors
2
and
3
contained in each profile’s orthogonal decomposition.

170
10
Factor
Analysis
degree of asymmetry,
of
the mountain; and the third, the sharpness of
the mountain’s summit. We emphasize, however, that this interpreta-
tion was made after the factor analysis and was not based on any a
priori notions
of
how mountains might differ. We can then use the
factor loadings as a measure of the similarities between the mountains.
Since the amount of the first factor does not vary much between
mountains, we use a two-dimensional ordering based on the relative
amounts of the second and third factors in each of the mountain
profiles (Fig.
10.7).
11
CONTINUOUS INVERSE
THEORY AND TOMOGRAPHY
11.1
The Backus -Gilbert Inverse Problem
While continuous inverse problems are not the main subject of this
book, we will cover them briefly to illustrate their relationship to dis-
crete problems. Discrete and continuous inverse problems differ in
their assumptions about the model parameters. Whereas the model
parameters are treated as a finite-length vector in discrete inverse
theory, they are treated as a continuous function in continuous inverse
theory. The standard form of the continuous inverse problem is
di=
1.“
Gi(z)m(z) dz
(1 1.1)
when the model function
m(z)
varies only with one parameter, such as
depth
z.
When the model function depends on several variables, then
Eq.
(
1
1.1)
must be generalized to
di
=
Gi(x)m(x) dV,
(11.2)
1”
where
dV,
is the volume element in the space of
x.
The “solution”
of
a discrete problem can be viewed as either an
estimate of the model parameter vector
mM
or a series of weighted
averages of the model parameters,
mavg
=
Rm-,
where
R
is the resolu-
tion matrix (see Section
4.3).
If the discrete inverse problem is very
underdetermined, then the interpretation of the solution in terms of
weighted averages is most sensible, since a single model parameter is
171
172
11
Continuous Inverse Theory
and
Tomography
very poorly resolved. Continuous inverse problems can be viewed as
the limit of discrete inverse problems as the number of model parame-
ters becomes infinite, and they are inherently underdetermined. At-
tempts to estimate the model function
m(x)
at a specific point
x
=
xo
are futile. All determinations of the model function must be made in
terms of local averages, which are simple generalizations of the discrete
case,
myg
=
X.G:gd.
JUJ
=
Z.R..m-"
JUJ
where
R,
=
X.,G-,BG,:
N
rnavB(xo)
=
C
GTg(x0)
di
=
R(xo,x)rnhe(x) dVx
(1
1.3)
i-
1
I
where
N
R(xo,x)
=
C
GTg(xo)Gi(x)
i-
1
Here
G;g(xo)
is the continuous analogy to the generalized inverse
Gig
and the averaging function
R(xo ,x)
(often called the resolving kernel) is
the analogy to
R,
.
The average is localized near the target point
xo
if the
resolving kernel is peaked near
xo.
The solution of the continuous
inverse problem involves constructing the most peaked resolving ker-
nel possible with a given set
of
measurements (that is, with a given set of
data kernels,
Gi(x)).
The spread ofthe resolution function is quantified
by [compare with
Eq.
(4.23)]:
(1
1.4)
Here
w(xo,x)
is a nonnegative function that is zero at the point
xo
and
that grows monotonically away from that point. One commonly used
choice is the quadratic function
w(xo,x)
=
Ixo
-
x12.
Other, more
complicated functions can be meaningful if the elements of
x
have an
interpretation other than spatial position. After inserting the definition
of the resolving kernel
[Eq.
(1
1.3), second line] into the definition of
the spread
[Eq.
(1
1.4)], we find
4x0)
=
~vw~xo,x~R~xo,x~R~xo,x~
dvx
N
N
=
1
r-1
j-
I
w(x0
,x)
2
GTg(xo)Gi(x)
c
Gjg(xo)Gj(x)
dvx
NN
=
c c
Gr"(xo)G~~(xo)[~,(xo)l
(11.5)
i-1
j-1
1
1.2
Resolution and Variance Trade-off
173
where
(11.6)
The continuous spread function has now been manipulated into a
form completely analogous to the discrete spread function in Eq.
(4.24).
The generalized inverse that minimizes the spread
of
the resolu-
tion is the precise analogy of Eq.
(4.32).
11.2
Resolution and Variance Trade-off
Since the data
d
are determined only up to some error quantified by
the covariance matrix [cov d], the localized average rna"B(xo) is deter-
mined up to some corresponding error
NN
var[mavB(xo)]
=
C
GFg(x0)[cov dlijGj-g(x0)
(1
1.8)
i-1
j-1
As
in the discrete case, the generalized inverse that minimizes the
spread of resolution may lead to a localized average with large error
bounds.
A
slightly less localized average may
be
desirable because it
may have much less error. This generalized inverse may be found by
minimizing a weighted average of the spread of resolution and size
of
variance
minimize J'(xo)
=
a
w(xo,x)R2(xo,x)
dV,
+
(1
-
a)
~ar[~~B(x~)]
(1
1.9)
The parameter
a,
which varies between
0
and 1, quantifies the relative
weight given to spread of resolution and size
of
variance.
As
in the
discrete case (see Section
4.
lo), the corresponding generalized inverse
can be found by using Eq. (1
1.7),
where all instances of [Sij(xo)] are
replaced by
[S;(xO)]
=
a
Iv
w(x0 ,x)Gi(x)Gj(x)
dV,
+
(1
-
a)[cov dIij (1 1.10)
174
11
Continuous Inverse Theory
and
Tomography
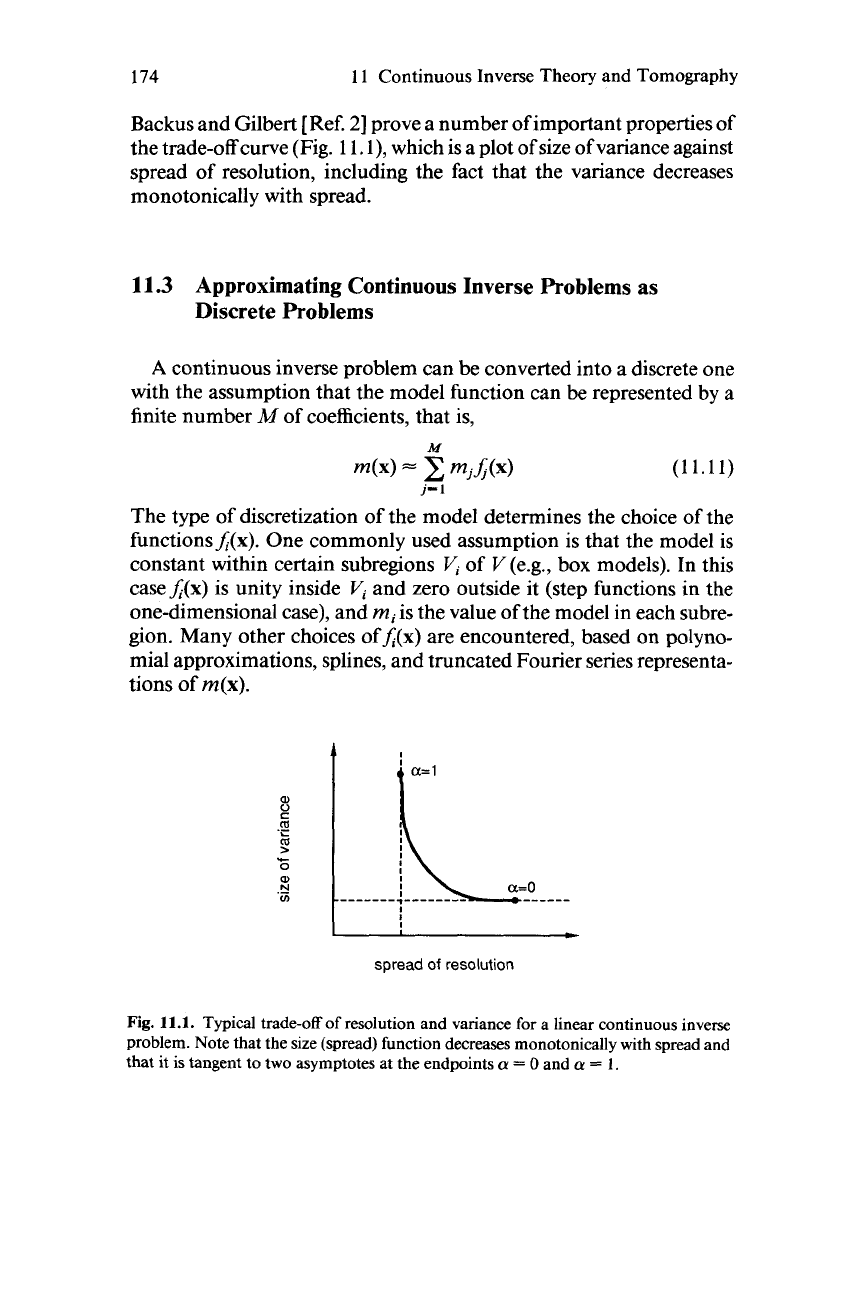
Backus and Gilbert [Ref.
21
prove a number of important properties of
the trade-off curve (Fig.
1
I.
l),
which is a plot of size of variance against
spread of resolution, including the fact that the variance decreases
monotonically with spread.
11.3
Approximating Continuous Inverse Problems as
Discrete Problems
A
continuous inverse problem can be converted into a discrete one
with the assumption that the model function can
be
represented by a
finite number
M
of
coefficients, that
is,
M
m(x)
C
mjJ(x)
(11.11)
j-
1
The type of discretization of the model determines the choice of the
functionsfi’(x). One commonly used assumption is that the model
is
constant within certain subregions of
V
(e.g., box models). In this
casefi’(x) is unity inside
Vi
and zero outside it (step functions in the
one-dimensional case), and
mi
is the value
of
the model in each subre-
gion. Many other choices ofA(x) are encountered, based on polyno-
mial approximations, splines, and truncated Fourier series representa-
tions
of
m(x).
W
N
v)
.-
I
D
spread of
resolution
Fig.
11.1.
Typical trade-off of resolution and variance for a linear continuous inverse
problem. Note that the size (spread) function decreases monotonically with spread and
that it is tangent to two asymptotes at the endpoints
a
=
0
and
a
=
1.
1
1.3
Continuous Inverse Problems
as
Discrete Problems
175
Inserting Eq.
(
1
1.1
1)
into the canonical continuous problem [Eq.
(1
1.2)]
leads to a discrete problem
M
=
5
[
/vGi(x)$(x)
dVx
G,mj
(1 1.12)
j-
1
where the discrete data kernel is
G,y
=
G~(x)$(x)
dVx
I
(1
1.13)
In the special case of the model function presumed to
be
constant in
subregions
Vi
of
V
(centered, say, on the points
xi),
Eq.
(1 1.13)
be-
comes
G..
Ij
=
I,
Gi(x)
d~x
(11.14)
If
the data kernel vanes slowly with position
so
that it is approximately
constant in the subregion, then we may approximate the integral as just
its integrand evaluated at
xj
times the volume
b:
r
Go=
Gi(x)
dVx
i=
Gi(xj)Q
J,
(11.15)
Two different factors control the choice of the size ofthe subregions.
The first is dictated by an
a
priori
assumption of the smoothness of the
model. The second becomes important only when one uses Eq.
(
1
1.15)
in preference to Eq.
(
1
1.14).
Then the subregion must be small enough
that the data kernels
G,(x)
are approximately constant in the subre-
gion. This second requirement often forces the subregions to
be
much
smaller than dictated by the first requirement,
so
Eq.
(
1
1.14)
should
be
used whenever the data kernels can be analytically integrated. Equa-
tion
(
l
l.
15)
fails completely whenever a data kernel has an integrable
singularity within the subregion. This case commonly arises in prob-
lems involving the use of seismic rays to determine acoustic velocity
structure.
176
11
Continuous
Inverse
Theory
and
Tomography
11.4
Tomography and
Continuous
Inverse Theory
The term “tomography” has come to be used in geophysics almost
synonymously with the term “inverse theory.” Tomography is derived
from the Greek word
tornos,
that
is,
slice, and denotes forming an
image of an object from measurements made from slices (or rays)
through it. We consider tomography a subset of inverse theory, distin-
guished by a special form
of
the data kernel that involves measure-
ments made along rays. The model function in tomography is a func-
tion of two or more variables and is related to the data by
d;
=
ICi
rn[X(S),Y(S)I
ds
(1
1.16)
Here the model function is integrated along a ray
Ci
having arc length
s.
This integral is equivalent to the one in a standard continuous problem
[
Eq.
(1
1.2)] when the data kernel is
G,(x,y)
=
6{x(s)
-
x,[y(s)]>
ds/dy,
where
6(x)
is the Dirac delta function:
r
(11.17)
Here
xis
supposed to vary with
y
along the curve
Ci
and y is supposed to
vary with arc length
s.
While the tomography problem is a special case of a continuous
inverse problem, several factors limit the applicability of the formulas
of the previous sections. First, the Dirac delta functions in the data
kernel are not square integrable,
so
that the S,[“overlap” integrals; see
Eq.
(1
1.6)] have nonintegrable singularities at points where rays inter-
sect. Furthermore, in three-dimensional cases the rays may not inter-
sect at all,
so
that all the
s,
may be identically zero. Neither
of
these
problems is insurmountable, and they can be overcome by replacing
the rays with tubes of finite cross-sectional width. (Rays are often an
idealization of a finite-width process anyway, as in acoustic wave prop-
agation, where they are an infinitesimal wavelength approximation.)
Since this approximation is equivalent to some statement about the
smoothness of the model function
m(x,y),
it often suffices to discretize
the continuous problem by dividing it into constant
rn
subregions,
where the subregions are large enough to guarantee a reasonable num-
1
1.5
Tomography and the Radon Transform
177
ber containing more than one ray. The discrete inverse problem is then
ofthe
form
di
=
ZjG,mj, where the data kernel Gijgives the arc length
of
the ith ray in thejth subregion. The concepts
of
resolution and
variance, now interpreted in the discrete fashion
of
Chapter
4,
are still
applicable and
of
considerable importance.
11.5
Tomography and
the
Radon Transform
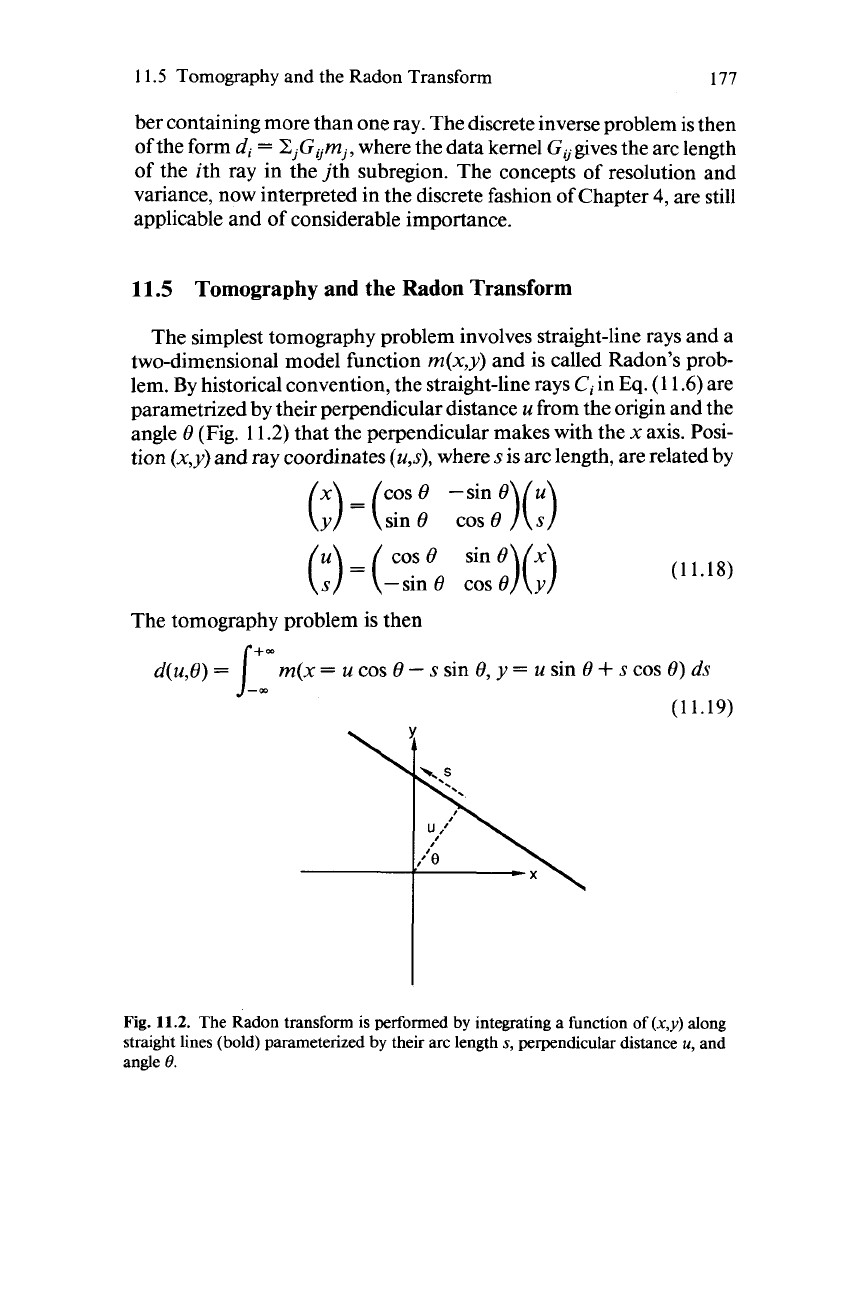
The simplest tomography problem involves straight-line rays and a
two-dimensional model function
m(x,y)
and is called Radon's prob-
lem.
By
historical convention, the straight-line rays
Ci
in
Eq.
(
1
1.6)
are
parametrized by their perpendicular distance
u
from the origin and the
angle
8
(Fig.
1
1.2)
that the perpendicular makes with the
x
axis. Posi-
tion
(XJ)
and ray coordinates
(u,s),
where
s
is arc length, are related by
(;)=(cos~ -sine)(;)
(;)
-
-
(
cos
8
sin
8)(")
sin
8
cos
8
-sin
8
cos
8
y
(11.18)
The tomography problem is then
m(x
=
u
cos
8
-
s
sin
8,
y
=
u
sin
8
+
s
cos
8)
ds
(11.19)
Fig.
11.2. The Radon transform is performed
by
integrating
a
function
of
(x,y)
along
straight lines (bold) parameterized
by
their arc length
s,
perpendicular distance
u,
and
angle
8.