Lyons W.C. (ed.). Standard handbook of petroleum and natural gas engineering.2001- Volume 1
Подождите немного. Документ загружается.

Prime Movers
405
Repulsion
Motor.
A
repulsion motor is a single-phase motor that has a stator winding
arranged
ti)r
connection to a commutator. Brushes on the commutator are short
circuited and are
so
placed that the magnetic axis of the stator winding. This type of
motor hau a varying-speed characteristic.
Repulsion-Start lnduction
Motor.
A
repulsion-start induction motor is a single-phase
motor having the same windings as
a
repulsion motor, but at a predetermined speed
the rotor winding is short circuited or otherwise connected to give the equivalent
of
a squirrelcage winding. This type of motor starts as
a
repulsion motor but operates
as
an induction motor with constant-speed characteristics.
Repulsion-lnduction
Motor.
A
repulsion-induction motor is a form of repulsion motor
that has
a
squirrekage winding in the rotor in addition to the repulsion motor winding.
A
motor of this type may have either a constant-speed (see
MG
1-1.30)
or varying-speed
(see
MMC;
1-1.31)
characteristic.
Universal Motors. A
universal motor is a series-wound motor designed to operate at
approximately the same speed and output on either direct current or single-phase
alternating current of a frequency not greater than
60
cycles/s and approximately
the same rms voltage. There are two types:
Series-Wound
Motor.
X
series-wound motor is a commutator motor in which the
field circuit and armature circuit are connected in series.
Compensated Series
Motor.
A
compensated series motor is a series motor with a
compensating field winding. (The compensating field winding and the series field
winding may be combined into one field winding.)
Direct-Current Motors
Direct-current motors are of three general types, shunt wound, series wound, and
compound wound, and are defined as follows:
Shunt-wound Motor. A
shunt-wound motor is a direct-current niotor in which the
field circuit and armature circuit are connected in parallel.
Straight Shunt-Wound
Motor.
A
straight shunt-wound motor is
a
direct-current motor
in which the field circuit is connected either in parallel with the armature circuit or
to a separate source of excitation voltage. The shunt field is the only winding supplying
field excitation.
Stabilized Shunt- Wound
Motor.
A
stabilized shunt-wound motor is
a
direct-current
motor in which the shunt field circuit is connected either in parallel with the armature
circuit or to a separate source of excitation voltage, and which also has a light series
winding added to prevent a rise in speed or to obtain a slight reduction in speed with
increase in load.
Series-wound Motor.
A
series-wound motor is a motor in which the field circuit and
armature circuit are connected in series.
Compound-Wound Motor. A
compound-wound motor is
a
direct-current motor
which as two separate field windings. One, usually the predominating field. is
406
Auxiliary Equipment
connected in parallel with the armature circuit. The other
is
connected in series
with the armature circuit.
Permanent Magnet Motor.
A
permanent magnet motor is a direct-current motor in
which the field excitation is suppled by permanent magnets.
Rating, Performance, and Test
rating, performance, and testing
[7]:
Rating
of
a Machine.
The rating
of
a machine shall consist of the output power
together with any other characteristics, such as speed, voltage, and current, assigned
to it by the manufacturer. For machines that are designed for absorbing power, the
rating shall be the input power.
Continuous Rating.
The continuous rating defines the load that can be carried for
an indefinitely long period
of
time.
Short-Time Rating.
The short-time rating defines the load that can be carried for a
short and definitely specified time.
Efficiency.
The efficiency of a motor
or
generator is the ratio of its useful power
output to its total power input and
is
usually expressed in percentage.
Power Factor.
The power factor of an alternating-current motor or generator
is
the
ratio of the kilowatt input (or output) to the kVA input (or output)
to
the
kV4
input
(or output) and is usually expressed as a percentage.
Service Factor
of
Alternating-current Motors.
The service factor
of
an alternating-
current motor
is
a multiplier that, when applied to the rated horsepower, indicates
a
permissible horsepower loading that may be carried under the conditions specified
for the service factor (see
MG
1-14.35).
Speed
Regulation
Of
Direct-Current Motors.
The speed regulation of
a
direct-
current motor is the difference between the steady no-load speed and the steady
rated-load speed, expressed in percent of rated-load speed.
Secondary Voltage
Of
Wound-Rotor Motors.
The secondary voltage of wound-rotor
motors is the open-circuit voltage at standstill, measured across the slip rings, with
rated voltage applied on the primary winding.
Full-Load Torque.
The full-load torque
of
a motor
is
the torque necessary to produce
its rated horsepower at full-load speed. In pounds at a 1-ft radius,
it
is equal to the
horsepower multiplied by
5,252
divided by the full-load speed.
Locked-Rotor Torque (Static Torque).
The locked-rotor torque of a motor is the
minimum torque that
it
will
develop at rest for all angular positions of the rotor, with
rated voltage applied at rated frequency.
Pull-Up Torque.
The pull-up torque
of
an alternating-current motor is the minimum
torque developed
by
the motor during the period of acceleration from rest
to
the
speed at which breakdown torque occurs.
For
motors that do not have a definite
The following defines and describes the commonly used terms of electric motor
Prime Movers
407
breakdown torque, the pull-up torque
is
the minimum torque developed up to
rated speed.
Breakdown Torque.
The breakdown torque of a motor is the maximum torque that
it
will
develop with rated voltage applied at rated frequency, without an abrupt drop
in speed.
Pull-Out Torque.
The pull-out torque of a synchronous motor is the maximum
sustained torque that the motor
will
develop at synchronous speed with rated voltage
applied at rated frequency and with normal excitation.
Pull-In Torque.
The pull-in torque of a synchronous motor is the maximum constant
torque under which the motor will pull its connected inertia load into synchronism,
at rated voltage and frequency, when its field excitation is applied. The speed to
which a motor
will
bring its load depends on the power required to drive
it.
Whether
the motor can pull the load into step from this speed depends on the inertia of the
revolving parts,
so
that the pull-in torque cannot be determined without having the
Wk2
as well as the torque of the load.
Locked-Rotor Current.
The locked-rotor current of a motor is the steady-state current
taken from the line with the rotor locked and with rated voltage (and rated frequency
in the case of alternating-current motors) applied to the motor.
Temperature Tests.
Temperature tests are tests taken to determine the temperature
rise of certain parts of the machine above the ambient temperature, when running
under a specified load.
Ambient Temperature.
Ambient temperature is the temperature of the surround-
ing cooling medium, such as gas of liquid, which comes into contact with the
heated parts of the apparatus.
Note:
Ambient temperature is commonly known as
“room temperature” in connection with air-cooled apparatus not provided with
artificial ventilation.
High-Potential Test.
High-potential tests are tests that consist of the application of
a
voltage higher than the rated voltage for a specified time
for
the purpose
of
determining the adequacy against breakdown of insulating materials and spacings
under normal conditions. (See MG
1,
Part 3.)
Starting Capacitance for a Capacitor Motor.
The starting capacitance for a capacitor
motor is the total effective capacitance in series with the starting winding under
locked-rotor conditions.
Radial Magnetic Pull and Axial Centerlng Force.
Radial
Magnetic
Pull.
The radial magnetic pull
of
a motor or generator is the
magnetic force on the rotor resulting from its radial (air gap) displacement from
magnetic center.
Axial
Centering Force.
The axial centering force of a motor or generator is the
magnetic force on the rotor resulting from its axial displacement from magnetic
center.
Note:
Unless other conditions are specified, the value of radial magnetic pull
and axial centering force
will
be for no load, with rated voltage, rated field current,
and rated frequency applied, as applicable.
408
Auxiliary Equipment
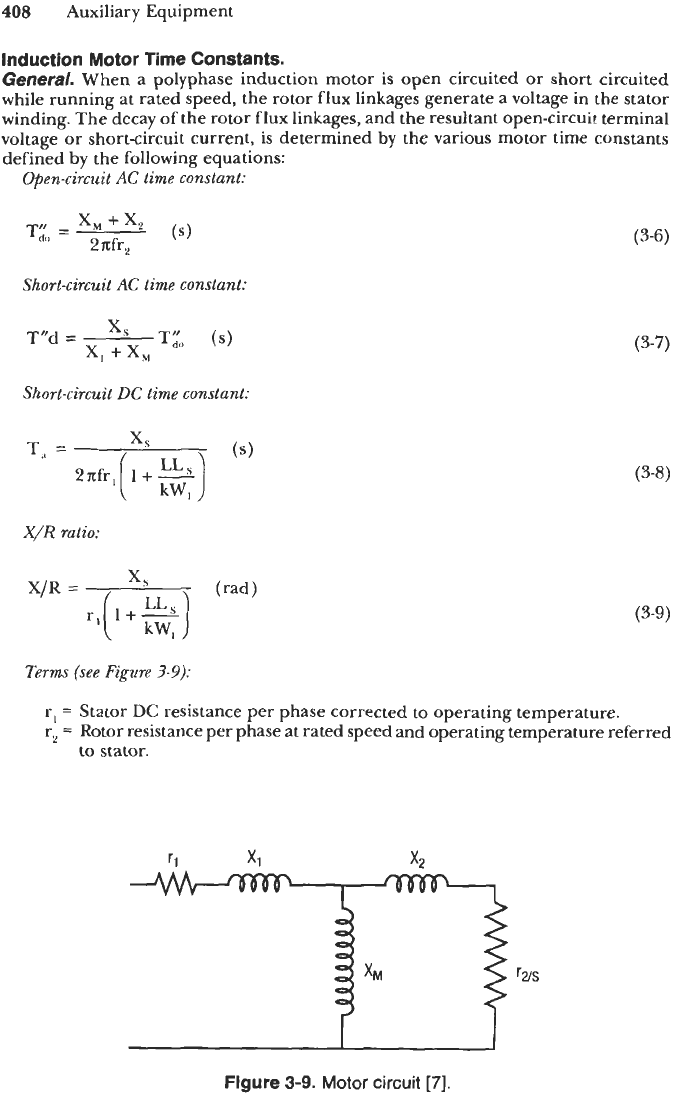
Induction Motor
Time
Constants.
General.
When
a
polyphase induction motor
is
open circuited
or
short circuited
while running at rated speed, the rotor
flux
linkages generate a voltage
in
the stator
winding. The decay of the rotor flux linkages, and the resultant open-circuit terminal
voltage
or
short-circuit current,
is
determined
by
the various motor time constants
defined by the following equations:
Open-circuit
AC
time constant:
Short-circuit
AC
time constant:
Short-circuit
DC
time constant:
X/R
ratio:
(3-7)
(3-9)
Term
(see Figure
3-9):
r,
=
Stator
DC
resistance per phase corrected to operating temperature.
rp
=
Rotor resistance per phase at rated speed and operating temperature referred
to stator.
Figure
3-9.
Motor
circuit
[7].
Prime Movers
409
X,
=
Stator leakage reactance per phase at rated current.
X,
=
Rotor leakage reactance per phase at rated speed and rated current referred
X,
=
Total starting reactance (stator and rotor) per phase at zero speed and locked-
X,
=
Magnetizing reactance per phase.
LLs
=
Fundamental-frequency component of stray-load
loss
in kilowatts at rated
to stator.
rotor current.
current.
kW,
=
Stator
12R
loss
in kilowatts at rated current and operating temperature.
f
=
Rated frequency in hertz.
s
=
Slip in per unit of synchronous speed.
AC
Performance
Examples
In general, the typical electric motor applications in the oil and gas industry arc
polyphase motors (either squirrel-cage or wound-rotor motors).
SqUirrel-Cage Motor.
This type of motor finds a broader application and a more
extensive and general use than any other type of motor. This is because it is, inherently,
the simplest type of electric motor and, also, has excellent characteristics and operates
essentially at constant speed. It has greater reliability and low maintenance require-
ments and thus meets a broad range of applications.
Torque, horsepower, and speed requirements demanded in drives for most machines
can be met with one of four designs of squirrel-cage polyphase induction motors.
Each design offers a different combination of torque, speed, and current characteristics
to meet the operating requirements of various industrial applications.
All
four designs can withstand full-voltage starting directly across the power lines,
that
is,
the motors are strong enough mechanically to withstand magnetic stresses
and the locked-rotor torques developed at the time the switch is closed.
Design
A
produces exceptionally high breakdown torques but at the expense of
high locket rotor currents that normally require provision for starting with reduced
voltage. This motor is suitable for machines in which the friction and inertia loads
are small.
Design
B
has normal starting torque adequate for
a
wide variety of industrial
machine drives and a starting current usually acceptable on power systems. This design
is suitable where slightly more than full load torque and low slip is required, also
where relatively high breakdown torque is needed to sustain occasional emergency
overloads, or where a low locked-rotor current is needed. These motors are for use in
driving machine tools, blowers, centrifugal pumps, and textile machines.
Design
C
has high starting torque and a normal breakdown torque. Applications
for this design are machines in which inertia loads are high at starting, but normally
run at rated full load and are not subjected to high overload demands after running
speed has been reached. Conveyors, plunger pumps, compressors that are not unloaded
at starting, and over chain conveyors, also hoists, cranes, and machine tools where
a
quick start and reversal are required are typical examples of such machines.
Design
D
develops extremely high starting torque with moderate starting current.
This design uses a high-resistance-type rotor to obtain variation of speed with load
and has no sharply defined breakdown torque. This motor eases off in speed when
surge loads are encountered and also develops high torque to recover speed rapidly.
Typical applications for this motor are machines in which heavy loads are suddenly
applied and removed at frequent intervals, such as hoists, machines with large
flywheels, conventional punch presses, and centrifuges.
410
Auxiliary Equipment
Slip ratings of the four designs are:
Design
Slip,
%
A
Less
than
5
B
Less
than
5
C
Less
than
5
0
5
or
more
Note that motors wit.h
10
or
more poles may have slip slightly greater than
5%.
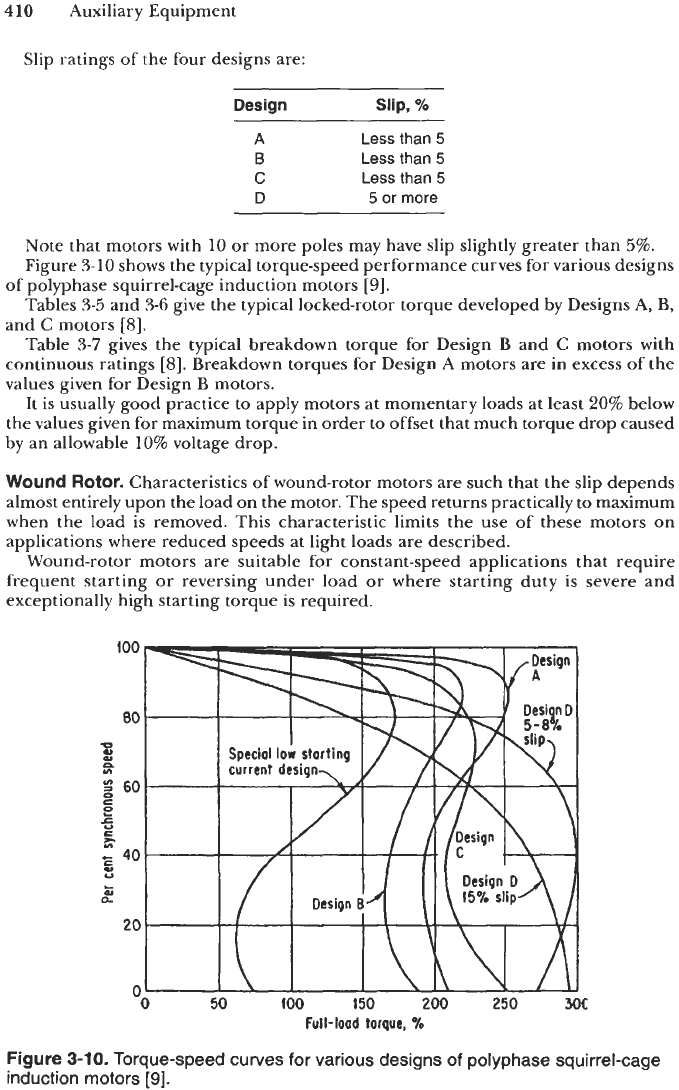
Figure
3-10
shows the typical torque-speed performance curves for various designs
of polyphase squirrel-cage induction motors
[9].
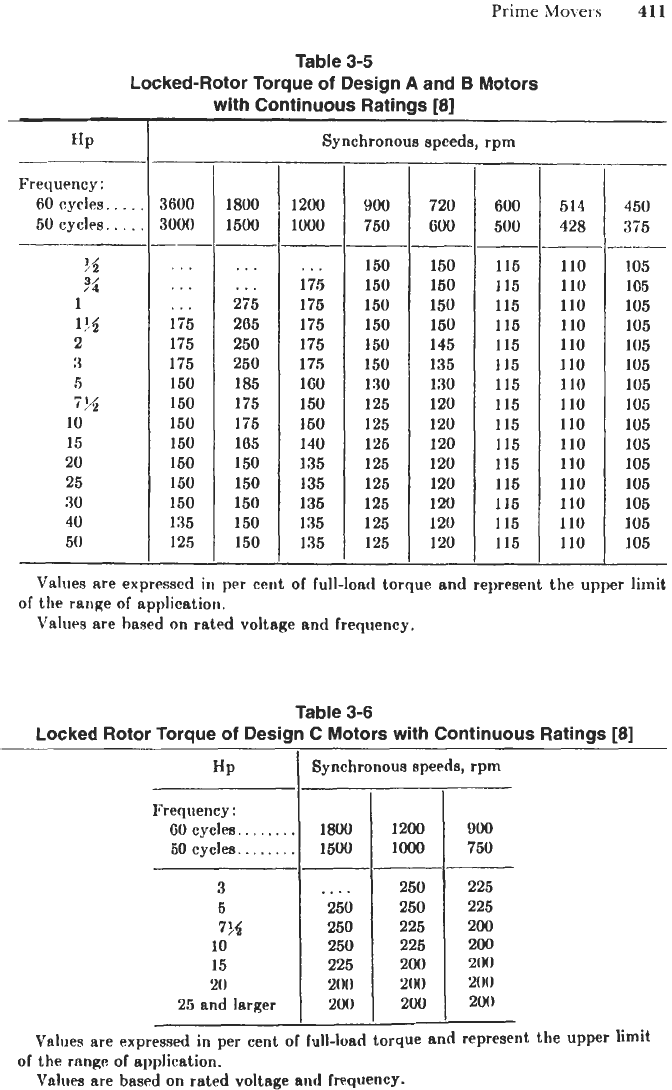
Tables
3-5
and
3-6
give the typical locked-rotor torque developed by Designs
A,
B,
and C motors
[8].
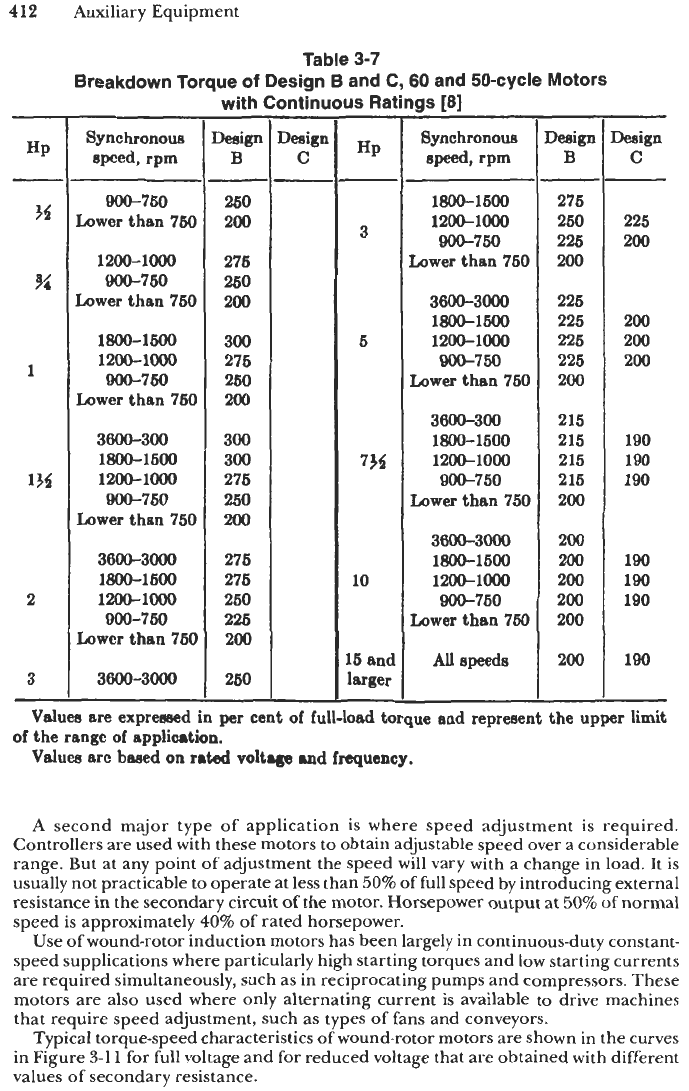
Table
3-7
gives the typical breakdown torque for Design
B
and
C
motors with
continuous ratings
[8].
Breakdown torques for Design
A
motors are in excess
of
the
values given for Design
B
motors.
It is usually good practice to apply motors at momentary loads at least
20%
below
the values given for maximum torque in order to offset that much torque drop caused
by
an allowable
10%
voltage drop.
Wound
Rotor.
Characteristics
of
wound-rotor motors are such that the slip depends
almost entirely upon the load
on
the motor. The speed returns practically to maximum
when the load is removed. This characteristic limits the use
of
these motors on
applications where reduced speeds at light loads are described.
Wound-rotor motors are suitable for constant-speed applications that require
frequent starting or reversing under load or where starting duty is severe and
exceptionally high starting torque is required.
Full-load
torque,
X
Figure
3-10.
Torque-speed curves for various designs
of
polyphase squirrel-cage
induction motors
[9].
Prime
Movers 41
1
ZIP
Synchronous speeds, rpm
Frequency:
60
cycles..
. .
.
50
cycles.
.
.
.
.
1800
1500
3600
3001)
1200
1000
35
?t
1
116
2
3
5
7%
I0
15
20
25
30
40
50
...
...
...
175
175
175
150
150
150
150
150
150
150
135
I25
...
...
275
205
250
250
185
175
175
165
1
50
150
150
I50
I50
...
175
175
175
175
175
100
150
150
140
135
135
135
135
135
900
750
1
50
150
150
150
150
150
130
125
125
125
125
125
125
125
125
720
GOO
150
150
150
150
145
I35
130
120
120
I20
120
120
120
120
120
600
500
115
115
115
115
115
115
115
115
115
115
115
115
115
I15
115
-
514
428
110
110
110
110
110
110
110
110
110
110
110
110
110
110
110
450
375
105
105
105
105
105
105
105
105
105
105
105
105
105
105
105
--
Values
we expressed
in
per
cent
of
full-load torque arid reprrswt the upper
hit
Valurs are hased on rated voltage and frequency.
of
the
range
of
application.
Table
3-6
Locked Rotor Torque
of
Design C Motors with Continuous Ratings
[8]
1200
lo00
250
250
225
225
200
2(H)
200
Values are expressed in
per
cent
of
full-load
torque
and represerrt the upper
limit
Valries are
bad
on rated voltage and frequency.
of
the
mnge
of
application.
1800
1500
....
250
250
250
225
200
200
900
750
Hp
I
Synchrqnous speeds,
rpm
I
Ihqiency:
GO
cyclea..
. .
.
.
. .
60
cycles..
.
.
. .
,
.
3
6
7%
10
15
20
25
and larger
225
225
200
200
200
200
200
412
Auxiliary Equipment
Deeign
B
275
250
225
200
225
225
225
225
200
215
215
215
215
200
200
200
200
200
200
200
Table
3-7
Breakdown Torque
of
Design B and
C,
60
and 50-cycle Motors
with Continuous Ratings
[8]
Design
C
--
225
200
200
200
200
190
190
190
190
190
190
190
Synchronous
apced, rpm
900-750
Lower than
760
1200-1OOO
900-750
Lower than
750
1800-1MN)
1200-1000
000-750
Lower than
750
3600-300
1800-1500
1200-1000
900-760
Lower than
750
3600-3000
1800-1600
1200-1000
900-750
Lower than
760
3600-3000
-
Design
C
-
-
Design
B
250
200
276
250
200
300
275
260
200
300
300
275
250
200
275
276
250
225
200
250
-
HP
-
3
5
735
10
15
and
larger
-
Synchronous
epee4 rpm
1800-1500
1200-1000
900-750
Lower than
750
3600-3000
1800-1500
1200-1000
900-760
Lower than
760
3600-300
1800-1500
1200-1000
900-750
Lower than
750
3600-3000
1800-1600
1200-1000
900-760
Lower than
750
All
speeds
Values are expressed in
per
cent of full-load torque and represent the upper limit
Values are based on rated
voltage
md
frequency.
of the range
of
application.
A
second major type of application is where speed adjustment
is
required.
Controllers are used with these motors to obtain adjustable speed over a considerable
range. But at any point of adjustment the speed
will
vary with a change in load.
It
is
usually not practicable to operate at less than
50%
of
full speed by introducing external
resistance
in
the
secondary circuit
of
the motor. Horsepower output at
50%
of normal
speed is approximately
40%
of rated horsepower.
Use
of
wound-rotor induction motors has been largely
in
continuous-duty constant-
speed supplications where particularly high starting torques and low starting currents
are required simultaneously, such as in reciprocating pumps and compressors. These
motors are also
used
where only alternating current is available
to
drive machines
that require speed adjustment, such as types
of
fans and conveyors.
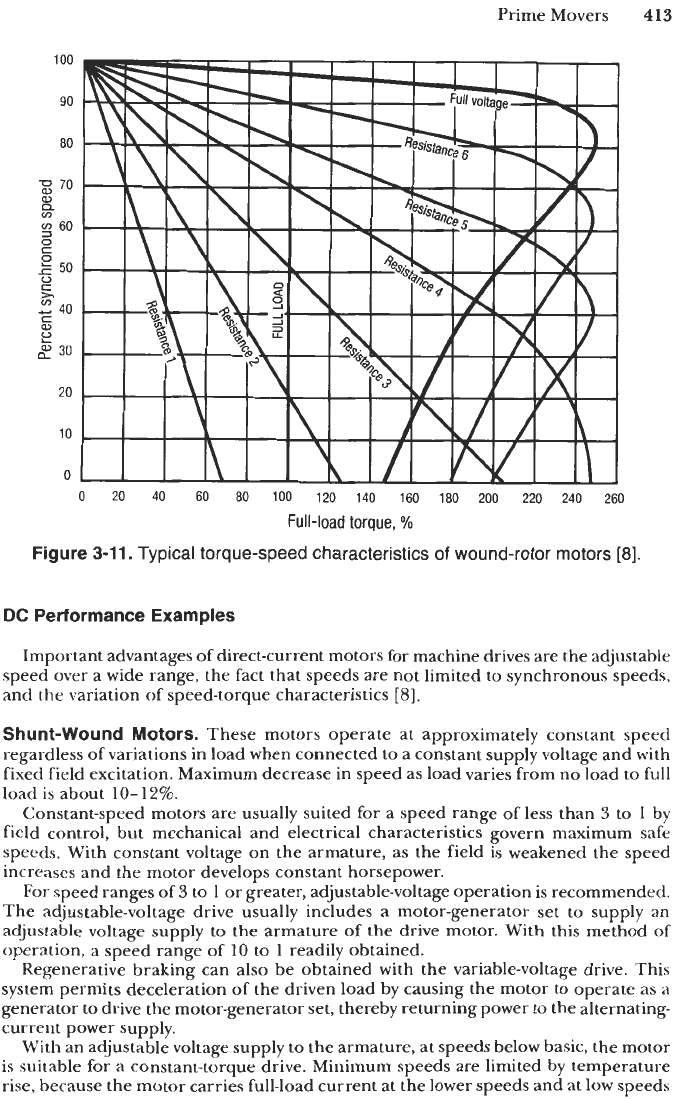
Typical torque-speed characteristics of wound-rotor motors are shown in the curves
in Figure
3-1
1
for full voltage and for reduced voltage that are obtained with different
values
of
secondary resistance.
Prime Movers
413
100
90
80
70
8
60
50
3
40
2
2
30
20
al
0.
cn
0
c
0
c
z
c
al
10
0
0
20
40
60
80
100 120 140
160
180
200
220
240
260
Full-load
torque,
%
Figure
3-11.
Typical torque-speed characteristics
of
wound-rotor motors
[8].
DC
Performance Examples
Important advantages of direct-current motors for machine drives are the adjustable
speed over a wide range, the fact that speeds are not limited to synchronous speeds,
and the variation of speed-torque characteristics
[8].
Shunt-Wound Motors.
These motors operate at approximately constant speed
regardless of variations in load when connected to a constant supply voltage and with
fixed field excitation. Maximum decrease in speed as load varies from no load to full
load
is
about
10-12%.
Constant-speed motors are usually suited for a speed range of less than
3
to
1
by
field control, but mechanical and electrical characteristics govern maximum safe
speeds. With constant voltage on the armature, as the field is weakened the speed
increases and the motor develops constant horsepower.
For
speed ranges of
3
to
1
or greater, adjustable-voltage operation is recommended.
The adjustable-voltage drive usually includes a motor-generator set to supply an
adjustable voltage supply
to
the armature
of
the drive motor. With this method
of
operation, a speed range of
10
to
1
readily obtained.
Regenerative braking can also be obtained with the variable-voltage drive. This
system permits deceleration of the driven load by causing the motor
to
operate
as a
generator to drive the motor-generator set, thereby returning power to the alternating-
current power supply.
With an adjustable voltage supply to the armature, at speeds below basic, the motor
is
suitable for
a
constant-torque drive. Minimum speeds are limited by temperature
rise, because the motor carries full-load current at the lower speeds and at low speeds
414
Auxiliary Equipment
the ventilation is reduced. Adjustable voltage drives are used for paper mills, rubber
mill machinery, winders, machine-tool drives, and hoists.
Adjustable-speed shunt-wound motors with field control are designed for operation
over speed ranges of
3
to
1
or
greater. Standard adjustable-speed motors are rated in
three ways: tapered horsepower, continuous, 4OoC rise; constant horsepower,
continuous,
40°C
rise; and constant horsepower, 1 hr,
50°C
rise,
of
the next larger
horsepower rating than for continuous duty.
The
1
hr, 50°C open motors develop constant horsepower over the entire speed
range. Semienclosing covers can be added without changing the rating.
The 40°C continuous-rated open motors develop the rated horsepower from 150%
of
minimum speed to the maximum speed. From minimum speed to
159%
of minimum
speed, the rated horsepower
will
be developed continuously without exceeding safe
temperature limits.
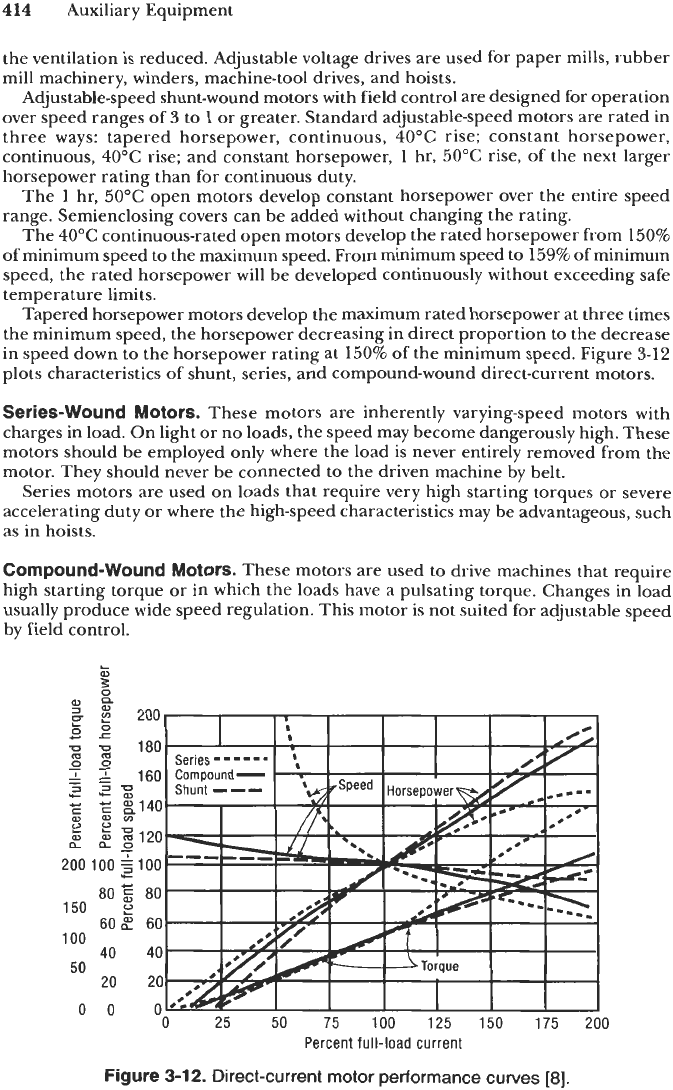
Tapered horsepower motors develop the maximum rated horsepower at three times
the minimum speed, the horsepower decreasing in direct proportion
to
the decrease
in speed down to the horsepower rating at
150%
of the minimum speed. Figure 3-12
plots characteristics
of
shunt, series, and compound-wound direct-current motors.
Series-wound
Motors.
These motors are inherently varying-speed motors with
charges in load. On light
or
no loads, the speed may become dangerously high. These
motors should be employed only where the load is never entirely removed from the
motor. They should never be connected to the driven machine by belt.
Series motors are used on loads that require very high starting torques or severe
accelerating duty or where the high-speed characteristics may be advantageous, such
as in hoists.
Compound-Wound
Motors.
These motors are used to drive machines that require
high starting torque or in which the loads have a pulsating torque. Changes in load
usually produce wide speed regulation. This motor is not suited for adjustable speed
by field control.
W
a
P
0
c
I
c
W
01
CL
2
200
150
100
50
0
5
2
a
W
0
c
E
100
2
40
20
0
Percent
full-load
current
Figure
3-12.
Direct-current motor performance curves
[8].