Luo A.C.J. (Ed.) Dynamical Systems: Discontinuity, Stochasticity and Time-Delay
Подождите немного. Документ загружается.

128 Z. Shang et al.
11.4.1 Stability Domains in the Plane of ˝
In this case, the mass ratio and the stiffness ratio are fixed to M
sr
D 0:2; ˇ
sr
D 2:0.
The stability domains of the synchronous full annular rub solutions in the parameter
plane of ˝ at different cross-coupling coefficients are studied.
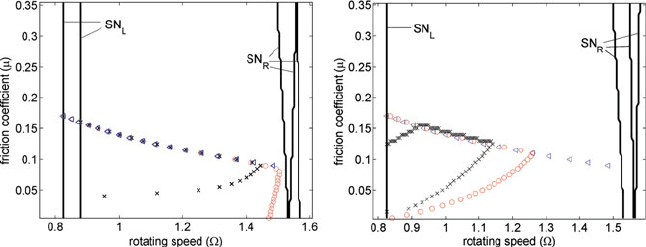
Figure 11.2 demonstrates the influence of the cross-coupling stiffness on the
stability domains. In Fig. 11.2 (left), it is found that with the increase of the cross-
coupling stiffness of the rotor,
r
, from 0.0 to 0.4, both the lower and the upper
existence boundaries of the solution move rightward. So the existence region of
the solution has almost no change with the increase of
r
while the stable domain
shrinks. In fact, the increase of the stable domain may be observed when
r
is tuned
between 0.0 and 0.2. As pointed out in [3], the dry friction and the cross-coupling
stiffness of the rotor play contrary roles in stabilizing the synchronous full annular
rub solution and both can destabilize the solution. So when the two parameters are
well balanced for the given system parameters, the synchronous full annular solu-
tion is stable. As either of the two parameters is too large to be compensated by the
other one, the solution will become unstable. In Fig. 11.2 (left), the lower branches
of the stability boundary at
r
D 0:2 and
r
D 0:4 are due to the too large cross-
coupling stiffness of the rotor. In Fig. 11.2 (right), it is easily seen that the increase
of the cross-coupling stiffness of the stator has no influence on the lower boundary
of the existence region of the synchronous full annular solution, but will shift the
upper boundary to the right. So the increase of
s
will enlarge the existence region
of the solution. Meanwhile it will also monotonically reduce the stability domain
of the solution, indicating the disadvantage for the appearance of the cross-coupling
stiffness of the stator in the rotor-to-stator contact systems.
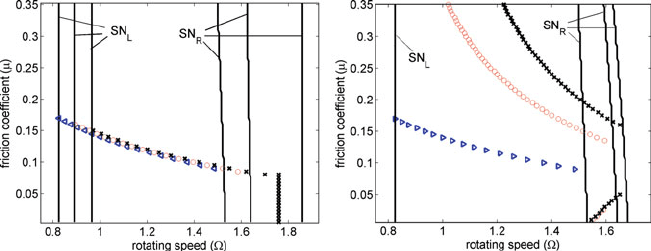
The influence of the cross-coupling damping on the stability of the synchronous
full annular rub solution is demonstrated in Fig. 11.3. It is found from Fig. 11.3 (left)
Fig. 11.2 Stability chart of the synchronous full annular solution in the parameter plane of ˝
at different cross-coupling stiffness coefficients. Left: in the case that
s
D
r
D
s
D 0,where
(inverted open triangle) stands for the stability boundary at
r
D 0,(open circle)at
r
D 0:2,
(cross)at
r
D 0:4. Right: in the case that
r
D
r
D
s
D 0,where(inverted open triangle)
stands for the stability boundary at
s
D 0,(open circle)at
s
D 0:2,(cross)at
s
D 0:4
11 Cross-Coupling Effects on the Dynamics of Rotor/Stator Rubbing 129
Fig. 11.3 Stability chart of the synchronous full annular solution in the parameter plane of ˝
at different cross-coupling damping coefficients. Left: in the case that
r
D
s
D
s
D 0,where
(inverted open triangle) stands for the stability boundary at
r
D 0,(open circle)at
r
D 0:2,
(cross)at
r
D 0:4. Right: in the case that
r
D
s
D
r
D 0,where(inverted open triangle)
stands for the stability boundary at
s
D 0,Oat
s
D 0:2,(cross)at
s
D 0:4
that the cross-coupling damping of the rotor,
r
, has a little influence on the size of
the existence region of the synchronous full annular rub solution when
r
changes
from 0.0 to 0.2 then to 0.4. But it has almost no effect on the stability domain of
the solution. The effect of the cross-coupling damping of the stator is significant in
comparison. First, it enlarges the existence region of the full annular rub solution
by keeping the lower boundary unchanged and moving the upper boundary right-
ward. Secondly, it increases the stability domain of the solution remarkably. So the
cross-coupling damping of the stator will benefit the synchronous full annular rub
response by avoiding the contact severity between the rotor and the stator through a
synchronous full annular rub.
11.4.2 Stability Domains in the Plane of ˝ˇ
sr
Below the mass ratio and the friction coefficient are fixed to M
sr
D 0:2; D
0:10. The cross-coupling damping of the rotor,
r
, on the stability domains of the
synchronous full annular rub solution in the parameter plane of ˝ ˇ
sr
are explored.
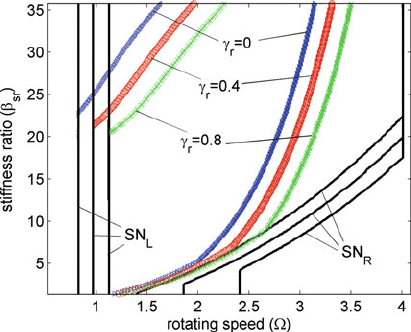
It is noticed from Fig. 11.4 that the speed range by which the synchronous full
annular rub solution exists increases significantly with the increase of the stiffness
ratio between the stator and the rotor. Meanwhile, the speed range of the stable
synchronous full annular rub solution becomes large when the stiffness ratio ˇ
sr
is
reduced, indicating that small stiffness ratio between the stator and the rotor may
benefit the system to have a relatively large range of mild rubbing in the case that
rubbing between the rotor and the stator is unavoidable.
The influence of the cross-coupling damping of the rotor on both the existence
region and the stable domain of the full annular rub solution is seen to be very little.
130 Z. Shang et al.
Fig. 11.4 Stability chart of the synchronous full annular solution in the parameter plane of ˝ ˇ
sr
at different cross-coupling damping of the rotor in the case that
r
D
s
D
s
D 0,where(inverted
open triangle) stands for the stability boundary at
r
D 0:0,(open circle)at
r
D 0:4,(cross)at
r
D 0:8
With the increase of
r
, the lower and the upper boundaries of the solution move
simultaneously to the right, while the stability boundaries of the solution shift in the
similar manner to produce seemingly unaltered stable domains.
11.4.3 Stability Domains in the Plane of ˝M
sr
To study the stability domains of the synchronous full annular rub solution in the
parameter plane of ˝M
sr
, the stiffness ratio and the friction coefficient are fixed
to ˇ
sr
D 2:0; D 0:10.
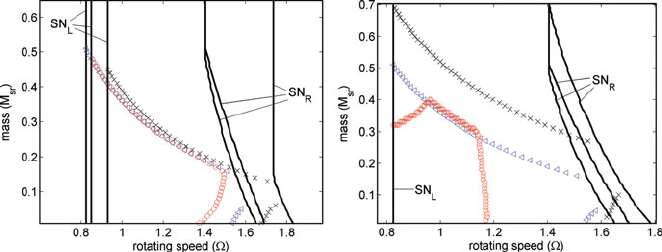
From Fig. 11.5 it is seen that the influence of the mass ratio on the existence re-
gion of the synchronous full annular rub solution is small. It is, however, observable
that the speed range of the stable synchronous full annular rub solution will take its
maximal value around M
sr
D 0:2. In order to get an overall view on the influence of
the cross-coupling effects on the stability of the synchronous full annular rub solu-
tion, the stability domains of the solution under the influence of the cross-coupling
effects of the rotor and of the stator are drawn in Fig. 11.5 (left) and (right), respec-
tively. It is found that the cross-coupling stiffness of the rotor slightly enlarges the
stability domain in this case and the cross-coupling damping of the rotor reduces
it as mentioned above (see Fig. 11.5 (left)). On the other hand, the increase of the
cross-coupling damping of the stator significantly enlarges the stable domain of the
synchronous full annular rub solution, while the increase of the cross-coupling stiff-
ness of the stator may largely reduce the stable domain of the solution, as shown in
Fig. 11.5 (right).
11 Cross-Coupling Effects on the Dynamics of Rotor/Stator Rubbing 131
Fig. 11.5 Stability chart of the synchronous full annular solution in the parameter plane of
˝M
sr
. Left: under the cross-coupling effects of the rotor with
s
D
s
D 0,where(inverted open
triangle) stands for the stability boundary at
r
D
r
D 0:0;(open circle)at
r
D 0:0;
r
D 0:3;
(cross)at
r
D 0:3;
r
D 0:0. Right: under the cross-coupling effects of the stator with
r
D
r
D 0,where(inverted open triangle) stands for the stability boundary at
s
D
s
D 0:0;
(open circle)at
s
D 0:3
s
D 0:0;(cross)at
s
D 0:0;
s
D 0:3
11.5 Conclusions
With the goal to understand the influence of cross-coupling effects on the rubbing-
related dynamics of rotor/stator systems, a model for a rotor/stator system including
both the dynamics of the stator and the deformation on the contact surface as well as
the cross-coupling damping and stiffness is set up in this chapter. After solving the
synchronous full annular rub solution of the model, the stability analysis of the so-
lution is then carried out. Our results show that except the cross-coupling damping
of the rotor, the other three cross-coupling terms all have influence on the stability
domains of the synchronous full annular rub solution. While the cross-coupling stiff-
ness of the stator can monotonically reduce the stability domain, the cross-coupling
stiffness of the rotor has some optimal value that may achieve a maximal stability
domain for the given system parameters. The cross-coupling damping of the stator
will benefit the rotor-to-stator contact system through significantly enlarging the sta-
ble domain of the synchronous full annular rub solution. Since the synchronous full
annular rub is a mild rub in comparing with the heavy rub, such as the quasiperiodic
partial rubs and the destructive self-excited dry friction backward whirls. So an ap-
propriate adaptation of the cross-coupling effects that can stabilize the synchronous
full annular rubs in the rotor/stator system may prevent system from quick damages
under rubbing.
Acknowledgments The authors are grateful for the financial support by the National Natural
Science Foundation of China (NSFC) under the grant No. 10872155, 10472086 and 10772140.
132 Z. Shang et al.
References
1. Muszynska A (1989) Rotor-to-stationary element rub-related vibration phenomena in rotating
machinery – literature survey. Sound Vib Dig 21:3–11
2. Black HF (1968) Interaction of a whirling rotor with a vibrating stator across a clearance an-
nulus. Int J Mech Eng Sci 10:1–12
3. Jiang J, Ulbrich H (2001) Stability analysis of sliding whirl in a nonlinear jeffcott rotor with
cross-coupling stiffness coefficients. Nonlinear Dyn 24:269–283
4. Yu JJ, Goldman P, Bently DE, Muszynska A (2002) Rotor/seal experimental and analytical
study on full annular rub. ASME J Gas Turbine Power, 124:340–350
5. Childs DW (1979) Rub-induced parametric excitation in rotors. J Mech Design 101:640–644
6. Ehrich FF (1988) High order sub-harmonic response of high speed rotors in bearing clearance.
ASME J Vib Acoust Stress Reliab 110:9–16
7. Day WB (1987) Asymptotic expansions in nonlinear rotor-dynamics. Quart Appl Math
44:779–792
8. YB Kim, Noah ST (1996) Quasi-periodic response and stability analysis for a nonlinear jeffcott
rotor. J Sound Vib 190:239–253
9. Choi SK, Noah ST (1994) Mode-locking and chaos in a Jeffcott rotor with bearing clearances.
ASME J Appl Mech 61:131–138
10. Abdul Azeez MF, Vakakis AF (1999) Numerical and experimental analysis of a continuous
overhung rotor undergoing vibro-impacts. Int J Nonlinear Mech 34:415–435
11. Choi YS (2002) Investigation on the whirling motion of full annular rotor rub. J Sound Vib
258:191–198
12. Jiang J, Ulbrich H (2005) The physical reason and the analytical condition for the onset of dry
whip in rotor-to-stator contact systems. ASME J Acoust Vib 127:594–603
13. Sun L, Krodkiewski JM (1998) Self-tuning adaptive control of forced vibration in rotor systems
using an active journal bearing. J Sound Vib 213:1–14
14. Knospe C, Hope R, Tamer S, Fedigan S (1996) Robustness of adaptive unba-lance control of
rotors with magnetic bearings. J Vib Control 2:33–52
15. Qiu JH, Tani J, Kwon T (2003) Control of self-excited vibration of a rotor system with active
gas bearings. ASME J Vib Acoust 125:328–334
16. Jiang J, Ulbrich H, Chavz A (2006) Improvement of rotor performance under rubbing condi-
tions through active auxiliary bearings. Int J Non-Linear Mech 41/8:949–957
Part II
Time-delay Systems
Chapter 12
Some Control Studies of Dynamical Systems
with Time Delay
Bo Song and Jian-Qiao Sun
Abstract This chapter presents a summary of recent studies of controlling
dynamical systems with time delay. The time delay can be uncertain and time-
varying with known lower and upper bounds. Two methods for approximate
solutions of the system with time delay are discussed, namely the method of
semi discretization and the method of continuous time approximation. The spec-
tral properties of mapping based methods are discussed. We also demonstrate the
supervisory control to handle uncertainties in time delay. Several control examples
are presented in the chapter.
12.1 Introduction
Time-delayed systems have been studied using discretization techniques with an
extended state vector. Pinto and Goncalves [1] fully discretized a nonlinear SDOF
system to study control problems with time delay. Klein and Ramirez [2] studied
MDOF delayed optimal regulator controllers with a hybrid discretization technique,
where the state equation was partitioned into discrete and continuous portions. Yang
andWu[3] and Stepan [4] have studied structural systems with time delay. A study
on stability and performance of feedback controls with multiple time delays is re-
portedin[5] by considering the roots of the closed-loop characteristic equation.
A method using Chebyshev polynomials to approximate general nonlinear functions
of time has been developed to handle linear and nonlinear time-delayed dynamical
systems with periodic coefficients [6–9]. The method has also been applied to study
optimal control problems. A temporal finite element method has been proposed in
[10] to study the stability of time-delayed systems with parametric excitations. The
work reported in [11] makes use of the piece-wise exact solution of linear differen-
tial equations with a single time delay to create a map in order to study the stability
J.-Q. Sun (
)
School of Engineering, University of California, Merced CA 95344, USA
e-mail: jqsun@ucmerced.edu
A.C.J. Luo (ed.), Dynamical Systems: Discontinuity, Stochasticity and Time-Delay,
DOI 10.1007/978-1-4419-5754-2
12,
c
Springer Science+Business Media, LLC 2010
135
136 B. Song and J.-Q. Sun
of the system. A series of papers in [12–14] have studied optimal feedback gain
designs based on the mapping of an extended state vector. For deterministic delayed
linear systems, a survey of methods for stability analysis is presented in [15]. An ex-
cellent survey of stability and control of time-delayed systems can be found in [16].
There have also been many studies of control systems with unknown and time-
varying time delays. Chen et al. derived sufficient conditions for the existence of
the guaranteed cost output-feedback controller in terms of matrix inequalities for
uncertain dynamical systems with time delay [17]. The Lyapunov method is used
in [18] for the stability analysis of systems with time-varying delay with known
lower and upper bounds. The Lyapunov function dependent on the known upper
bound of uncertain state-delays is derived in the study of model predictive controls
(MPC) for a constrained linear digital systems with uncertain state-delays [19]. A
class of iterative learning control systems with uncertain state delay and control
delay is studied in [20]. Robust stability of uncertain linear systems with interval
time-varying delay is studied in [21]. Stability of systems with bounded uncertain
time-varying bounded delays in the feedback loop is studied in [22]. The stabil-
ity problem is treated in the integral quadratic constraint (IQC) framework. Kwon,
Park and Lee [23] investigated delay-dependent robust stability for neutral systems
with the help of the Lyapunov method. The system has time-varying structured un-
certainties and interval time-varying delays. A compensation scheme that consists
of a fuzzy-PID controller and a neural network compensator is proposed for real-
time control over the network is studied in [24]. This scheme reduces the influence
of time delays on stability while maintaining the system performance. According
to [25], given a finite-dimensional linear time invariant (LTI) plant and an upper
bound on the admissible time delay, there is no general theory for designing a con-
troller to handle an arbitrarily large uncertain delay. The authors show that given
a finite-dimensional LTI plant and an upper bound on the admissible time delay,
there exists a linear periodic controller which robustly stabilizes the plant. Robust
stability for systems with random time-varying delay with a known probability dis-
tribution is studied in [26]. The resulting system model has stochastic parameters.
Sufficient conditions for the exponential mean square stability of the system are
derived by using the Lyapunov functional method and the linear matrix inequal-
ity (LMI) technique.
When the uncertain time delay is bounded with known lower and upper bounds,
we can consider the supervisory control [27–30]. The supervisory control proposes
to use several estimates of uncertain parameters for the system model. For each
estimate of the parameter, a control is designed to achieve the desired performance.
A supervisor monitors the real-time response of the system, selects a plant model
according to a switching criterion, and implements the corresponding control.
In this chapter, we review some recent control studies of dynamical systems
with time delay. We first review two approximate methods for computing the
response of time-delayed systems, discuss their properties and applications to feed-
back controls. We also introduce the supervisory control of systems with unknown
time delay. The influence of the range of the unknowntime delays on the supervisory
control is discussed. A number of examples are included to demonstrate the theo-
retical discussions.
12 Control of Systems with Time Delay 137
12.2 Methods of Solution
12.2.1 Semi-Discretization
Consider a linear periodic system with time delay
P
x.t/ D A.t/x.t/CA
d
.t/x.t / C B.t/u.t/; (12.1)
where x 2 R
n
and u 2 R
m
. A.t/ 2 R
nn
, A
d
.t/ 2 R
nn
and B.t/ 2 R
nm
are pe-
riodic matrices with period T . We shall consider a feedback control with or without
time delay in the following forms
u.t/ DKx.t/ or u.t/ DKx.t /; (12.2)
where K 2 R
mn
is the gain matrix. In the closed loop system, the control simply
modifies the matrix A.t/ or A
d
.t/.
When we introduce the method of semi-discretization, we can focus on the fol-
lowing system without loss of generality,
P
x.t/ D A.t/x.t/CA
d
.t/x.t /: (12.3)
Because of the time delay, the state vector of the system is no longer just x.t/,
but .x
T
.t/; x
T
.t
1
//
T
for all 0<
1
, which has an infinite dimension. The
time delay significantly complicates the solution process of the system.
Let us discretize the period T into an integer k intervals of length t such that
T D kt. For the sake of simplicity, we assume that the time delay D Nt
where N is an integer. When an integer N cannot be found, discretization of the
time delay will be approximate [31], or a continuous time approximation can be
adopted as discussed in Sect.12.2.2.
Consider (12.3) in a time interval t 2 Œt
i
;t
iC1
,wheret
i
D it, i D
0;1;2;:::;k. In each small time interval Œt
i
;t
iC1
, the delayed responses x.t /
and the time dependent coefficients are assumed to be constant. We denote
x.t
i
/ D x..i N/t/ D x
iN
;
A.t
i
/ D A
i
; A
d
.t
i
/ D A
di
: (12.4)
Equation (12.3) becomes
P
x.t/ A
i
x.t/ D A
d
.t/x.t / t 2 Œt
i
;t
iC1
; i D 0;1;2;:::;k: (12.5)
The general solution of the equation is
x.t/ D e
A
i
.tt
i
/
x
i
C
Z
t
t
i
e
A
i
.tt
i
O
t/
A
d
.
O
t/x.
O
t /d
O
t;
t 2 Œt
i
;t
iC1
; i D 0;1;2;:::;k: (12.6)
138 B. Song and J.-Q. Sun
The integration on the RHS of the above equation can be computed by assuming
that A
d
.t/x.t / is a constant or a linear function of time over the small interval
Œt
i
;t
iC1
.Theworkin[32] has studied the accuracy of these approximation schemes.
As an example, we show the case when A
d
.t/x.t / is assumed to be constant
over Œt
i
;t
iC1
: The response x
iC1
D x.t
iC1
/ at time t
iC1
can then be expressed in
the following mapping
x
iC1
D Q
i
x
i
C P
i
x
iN
: (12.7)
where
P
i
D
Z
t
iC1
t
i
e
A
i
.t/
A
di
d; Q
i
De
A
i
t
; (12.8)
Define an .N C1/n dimensional state vector as
y
i
D
x
T
i
x
T
i1
x
T
i2
::: x
T
iN
T
: (12.9)
A mapping of the state vector over the interval Œt
i
;t
iC1
can be found as
y
iC1
D H
i
y
i
; (12.10)
where the transition matrix from time t
i
to t
iC1
is
H
i
D
2
4
Q
i
0
n.N 1/n
P
i
I
nn
0
n.N 1/n
0
nn
0
.N 1/nn
I
.N 1/n.N 1/n
0
.N 1/nn
3
5
: (12.11)
The mapping of the state vector over one period T D kt is therefore
y
j C1
D ˆy
j
; (12.12)
where the mapping matrix ˆ is given by
ˆ D H
k1
H
k2
H
1
H
0
: (12.13)
Note that the index j (j D 0; 1; :::) refers to the number of periods, i.e. y
j
is the
state vector at the beginning of the j th period.
The stability of the control system is determined by the eigenvalues of ˆ.Let
jj
max
denote the largest absolute value of eigenvalues of the matrix ˆ. Then,
jy
j C1
jjj
max
jy
j
j: (12.14)
When jj
max
<1, ˆ is a contraction, and the control system is asymptotically
stable. The stability boundary is given by jj
max
D 1. Equation (12.14) indicates
that the smaller jj
max
is, the faster the system converges to zero. jj
max
therefore
also provides a measure of the control performance.