Лобанов А.Н. Фотограмметрия
Подождите немного. Документ загружается.

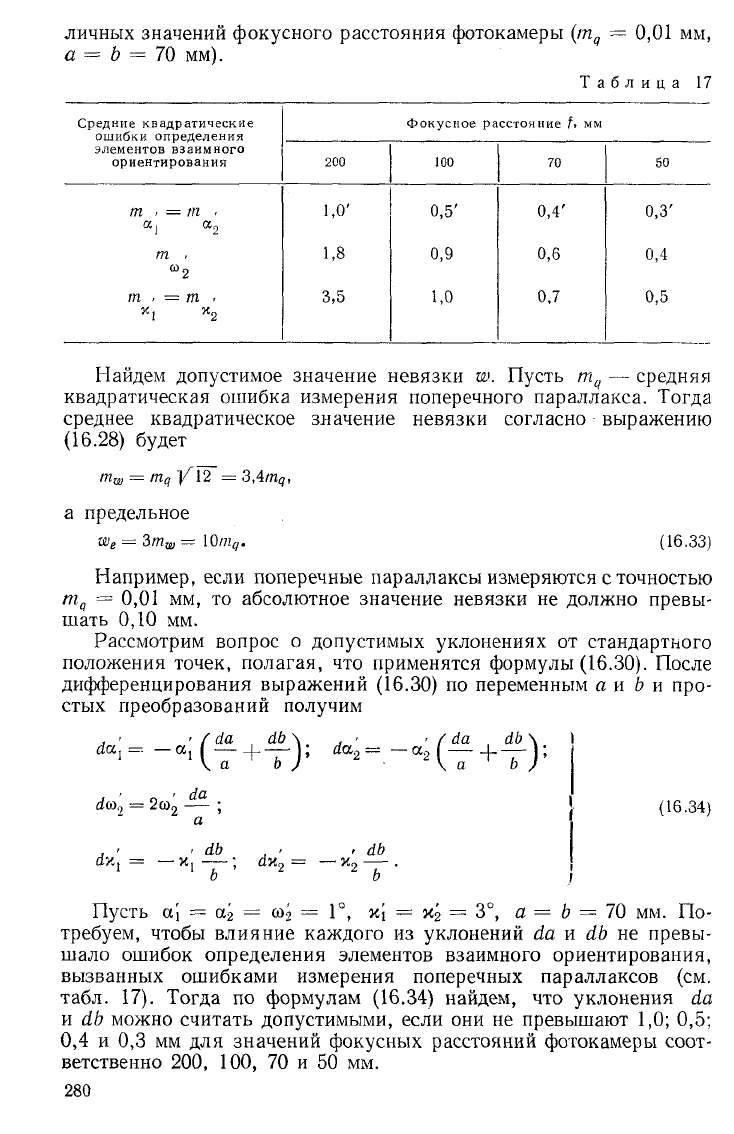
личных значений фокусного расстояния фотокамеры {т
я
— 0,01 мм,
а = Ъ = 70 мм).
Таблица 17
Средние квадратические
ошибки определения
элементов взаимного
ориентирования
Фокусное расстояние мм Средние квадратические
ошибки определения
элементов взаимного
ориентирования
200
100
70
50
т , = т , 1,0'
0,5' 0,4'
0,3'
СС| «2
0,5' 0,4'
0,3'
т ,
1,8 0,9
0,6 0,4
ш
2
0,4
т , = т .
3,5 1,0 0,7 0,5
у, к.
1,0 0,5
Найдем допустимое значение невязки
ы>.
Пусть т
ц
— средняя
квадратическая ошибка измерения поперечного параллакса. Тогда
среднее квадрэтическое значение невязки согласно выражению
(16.28) будет
т^ 1^12 = 3,4т<;,
а предельное
ш
е
= 3 т
т
=
10т
о
(16.33)
Например, если поперечные параллаксы измеряются с точностью
т
ч
= 0,01 мм, то абсолютное значение невязки не должно превы-
шать 0,10 мм.
Рассмотрим вопрос о допустимых уклонениях от стандартного
положения точек, полагая, что применятся формулы (16.30). После
дифференцирования выражений (16.30) по переменным а и Ь и про-
стых преобразований получим
- / ёа йЬ\ , - - (ёа ёЬ\ 1
йа
1
=-.
ёш
п
= 2со„
ёу.,
ёа
ЛЬ
ёп
2
=
аь
(16.34)
Пусть а| = а
2
= щ = 1°, щ = н
2
= 3°, а = 6 = 70 мм. По-
требуем, чтобы влияние каждого из уклонений йа и йЬ не превы-
шало ошибок определения элементов взаимного ориентирования,
вызванных ошибками измерения поперечных параллаксов (см.
табл. 17). Тогда по формулам (16.34) найдем, что уклонения йа
и йЬ можно считать допустимыми, если они не превышают 1,0; 0,5;
0,4 и 0,3 мм для значений фокусных расстояний фотокамеры соот-
ветственно 200, 100, 70 и 50 мм.
280
При выводе уравнения взаимного ориентирования (16.8) для
плановых снимков учитывались члены только первого порядка
малости. Кроме того, при составлении уравнений поправок (16.26)
предполагалось, что разности продольных параллаксов настолько
малы, что их можно не принимать во внимание. Вследствие этого
формулы (16.30) можно использовать для определения элементов
взаимного ориентирования только в случае, когда углы а, со и х
действительно малы, а местность равнинная.
§ 109. Определение элементов взаимного ориентирования
(т', VДа, До, Дх)
Измерим координаты п точек стереопары и найдем элементы
взаимного ориентирования т', V', Да, Дсо, Дх.
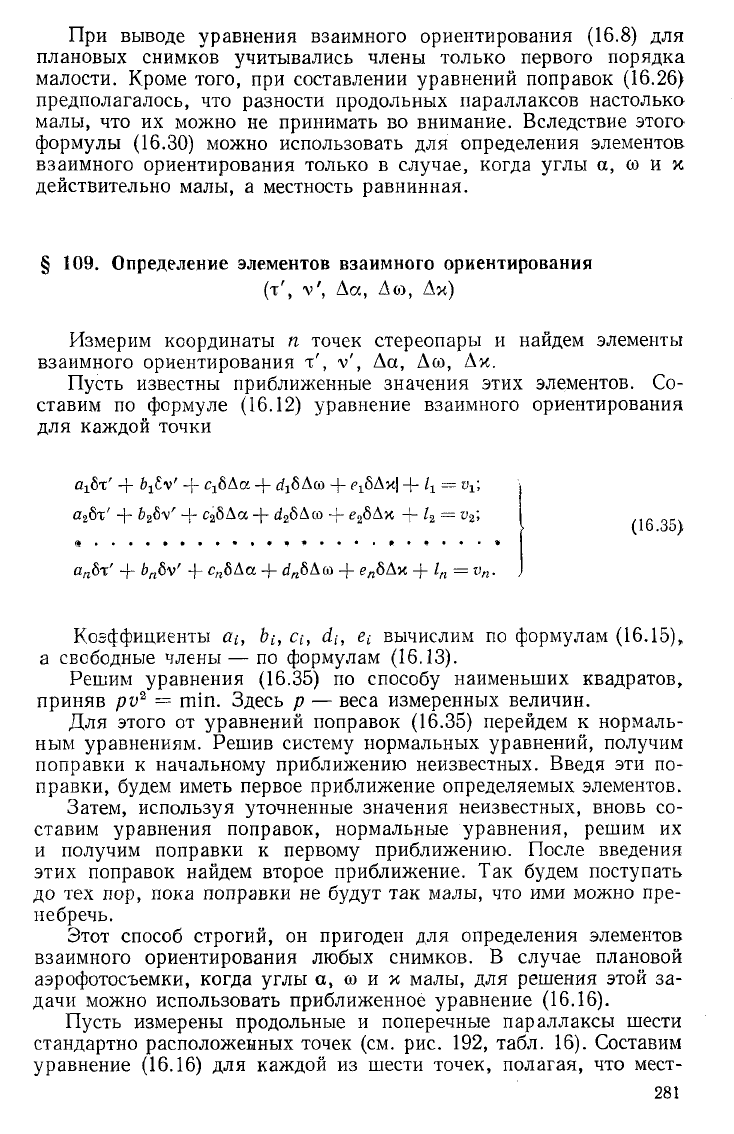
Пусть известны приближенные значения этих элементов. Со-
ставим по формуле (16.12) уравнение взаимного ориентирования
для каждой точки
а
±
6%' 4- Ь
г
1\' 4- С]8Дс. + ^бДсо + р
1
бДх| 4- к =
а
2
6т' 4" 4- с
2
бДа 4~ ё
2
6Асо 4" е
2
6Лх + /
2
= ^
а
п
6т' 4~ Ь
п
Ьу' 4 с
п
8Аа + й„6Дш -}- е
п
ЬАк 4 = у„.
Коэффициенты щ, Ьс, а, е* вычислим по формулам (16.15),
а свободные члены — по формулам (16.13).
Решим уравнения (16.35) по способу наименьших квадратов,
приняв ра
2
= тш. Здесь р — веса измеренных величин.
Для этого от уравнений поправок (16.35) перейдем к нормаль-
ным уравнениям. Решив систему нормальных уравнений, получим
поправки к начальному приближению неизвестных. Введя эти по-
правки, будем иметь первое приближение определяемых элементов.
Затем, используя уточненные значения неизвестных, вновь со-
ставим уравнения поправок, нормальные уравнения, решим их
и получим поправки к первому приближению. После введения
этих поправок найдем второе приближение. Так будем поступать
до тех пор, пока поправки не будут так малы, что ими можно пре-
небречь.
Этот способ строгий, он пригоден для определения элементов
взаимного ориентирования любых снимков. В случае плановой
аэрофотосъемки, когда углы а, ш и х малы, для решения этой за-
дачи можно использовать приближенное уравнение (16.16).
Пусть измерены продольные и поперечные параллаксы шести
стандартно расположенных точек (см. рис. 192, табл. 16). Составим
уравнение (16.16) для каждой из шести точек, полагая, что мест-
281
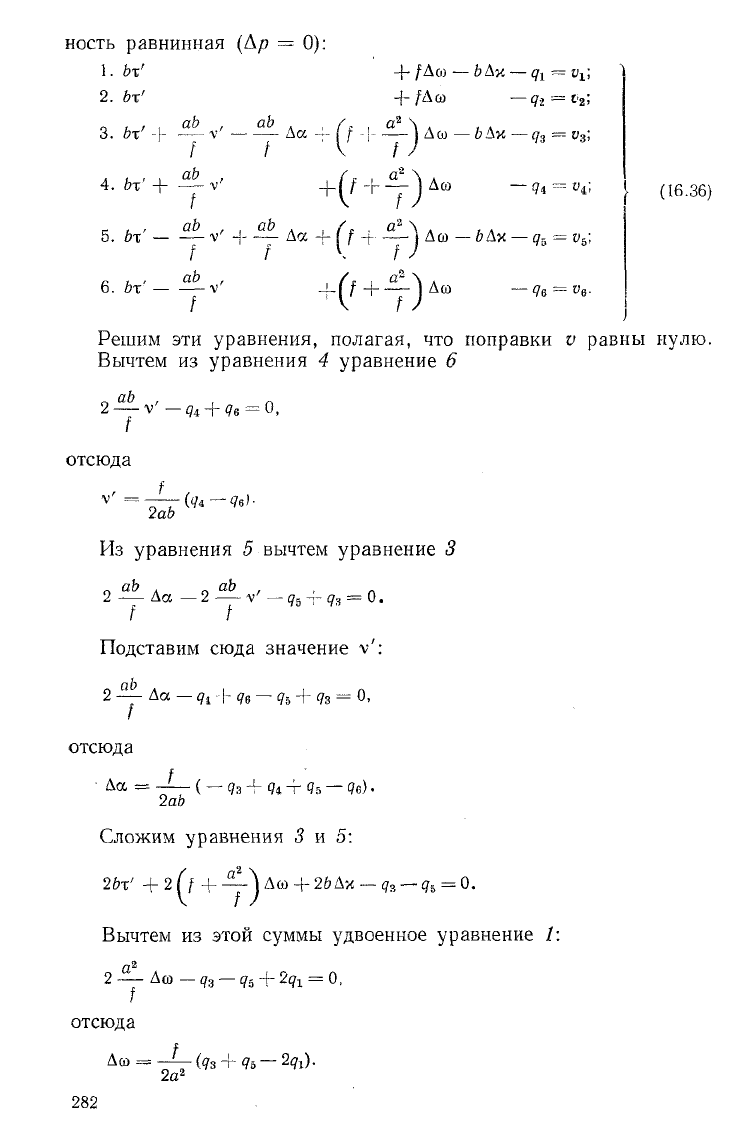
ность равнинная (Ар = 0):
1. Ьх'
2. Ъх'
о и Г
,
аЪ , аЬ
3. Ьх - V Да
—
/ /
а < .
,
а
Ь ,
4. Ьх + -у- V' _)_
_ , , аЪ , аЪ .
5. 6т V' -{ Да
+ / Д о
—
6 Дх
— <71
= 01;
си' аЬ ,
6. ОТ — V
/
е-'-т)
С
+
т)
('
+
т)
-('+т)
Дш
—
Ь Дх
— (7
3
= у
3
;
Дм
— <?
4
=
Дсо
—
6Дх
—
д
5
= у
6
;
Дсо
• =
Щ-
(16.36)
Решим эти уравнения, полагая, что поправки V равны нулю.
Вычтем из уравнения 4 уравнение 6
2
~
V' — 94
+
9б
= о,
отсюда
V =—— (<?4—<7б)-
2аЬ
Из уравнения 5 вычтем уравнение 3
2 Да-2-^-V'+ = 0.
Г /
Подставим сюда значение V':
2 Да
— <7
4
<7в — <7
5
+
<7з
= 0,
отсюда
' Да (
—
93-^94 4-95
—
9е).
2 аЬ
Сложим уравнения 3 и 5:
2&т' +
2
^ + -у^
Дсо
+ 26 Дх
— д
3
— <?
5
= 0.
Вычтем из этой суммы удвоенное уравнение /:
2 -у- Дш
—
д
3
<7з
+
2<7х
= 0,
отсюда
Дш =
282
2 а
2
(9з + 9о—291).
Найдем элемент Дсо еще раз. Сложив уравнения 4 и 5 и вычтя
из полученной суммы удвоенное уравнение 2, будем иметь
I
отсюда
Асо
=
Асо — <7
4
+
<7„
+
2<7
2
= 0,
л
2а
2
-<?*
—
2
<7а)-
Наконец, из уравнений 2 и 1 получим
х'
••
1
Дсо •
<72
Ь
Ди = (
(?2
_
?1
).
Ъ
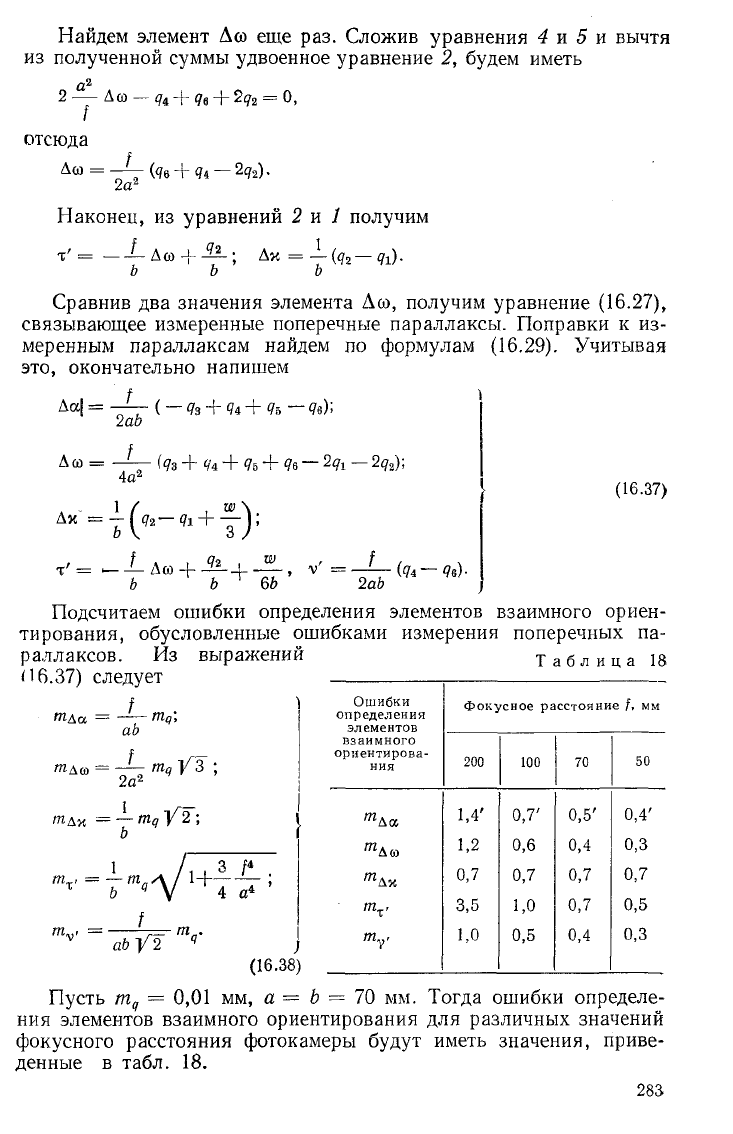
Сравнив два значения элемента Дсо, получим уравнение (16.27),
связывающее измеренные поперечные параллаксы. Поправки к из-
меренным параллаксам найдем по формулам (16.29). Учитывая
это, окончательно напишем
Да| =
1
Дсо =
2 аЬ
I
4 а
2
(
— <7з
+
<7«
+
<7о
- (<?з
+
</'4
+
<7б
+
<
Дх
т'= '—— Дсо
-<7е);
-2ц
х
-2ц
ъ
у,
/
2аЬ
(16.37)
Подсчитаем ошибки определения элементов взаимного ориен-
тирования, обусловленные ошибками измерения поперечных па-
раллаксов. Из
П6.37) следует
X
аЬ
2а
2
выражении
Таблица 18
тдсо
;
ГПд
/3
«Ди =
— я»?
;
Ь
4 а
4
аЬ У2
т„
(16.38)
Ошибки
определения
элементов
взаимного
ориентирова-
ния
Фокусное расстояние мм
Ошибки
определения
элементов
взаимного
ориентирова-
ния
200 100 70
50
т
Д<х
1,4'
0,7'
0,5'
0,4'
1,2
0,6 0,4
0,3
0,7
0,7 0,7
0,7
"V
3,5
1,0
0,7 0,5
т
у
1,0 0,5 0,4
0,3
Пусть т
д
= 0,01 мм, а = Ь = 70 мм. Тогда ошибки определе-
ния элементов взаимного ориентирования для различных значений
фокусного расстояния фотокамеры будут иметь значения, приве-
денные в табл. 18.
283
В закл!°
чение
найдем зависимость между двумя системами эле-
ментов взаимного ориентирования. Сопоставляя выражения (16.37)
и (16.30), получим
Да = а^—
а
р Дш = со
2
; Дх = х
2
—
Ир
т = —Хр V =
—
а
р
(16.39)
Первые три из
этих
формул — приближенные, так как они учиты-
вают только члены первого порядка малости, а остальные две —•
строгие.
§ 110. Не0
п
Р
е
Д
еленность
взаимного ориентирования *
Задача взаимного ориентирования снимков плоской местности
имеет всегД
3
однозначное решение. В горной местности может быть
случай, когда решение этой задачи становится неоднозначным. Эта
неоднозна^
ность
зависит от формы рельефа местности и заклю-
чается в том, что условие пересечения соответственных лучей пере-
стает быт1> достаточным для определения взаимного положения
снимков, сУЩ
ествовавшего в0
время съемки. В этом случае форма
геометриче
ск
°й модели местности искажается и результаты изме-
рения этой модели нельзя использовать для составления карты.
Форма местности, при которой возникает неоднозначность ре-
шения заД
ачи
взаимного ориентирования снимков, называется
опасным местом.
Рассмотрим опасное место, имеющее большое практическое
значение,--" цилиндр. Для этого воспользуемся уравнением взаим-
ного ориентирования (16.8).
ОпредеЛ
яя
элементы взаимного ориентирования, составляем
систему уравнений и решаем ее. Известно, что неопределенность
возникает, когда общий определитель, составленный из коэффи-
циентов пр
и
неизвестных, обращается в нуль. Это возможно, если
элементы двух строк (столбцов) равны или пропорциональны.
Пусть элементы третьего столбца общего определителя пропор-
циональны элементам пятого столбца
Перейдем от величин /, х, у, относящихся к снимку, к соответст
вующим величинам Н, X, V на местности
Пусть К21
=
^21,
а
точка 1 выбрана не так, что V^ = 0
(рис. 193). Тогда условие (16.40) примет вид
1-
(16.40)
(16.41)
* По результатам исследований А. С. Скиридова и С. Финстервальдера.
284
Это уравнение окружности. Координаты ее центра и радиус имеют
следующие значения:
Н =
—
0,5Я
Х
; К = 0; Д =
0,5Н
1%
(16.42)
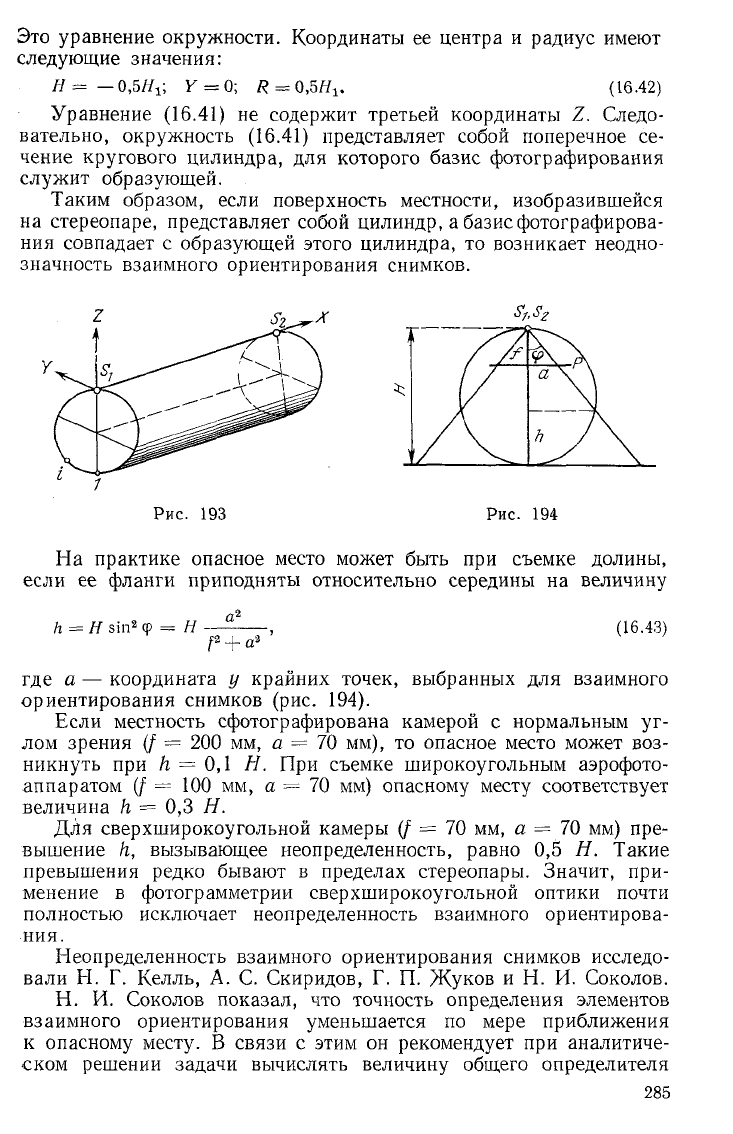
Уравнение (16.41) не содержит третьей координаты 1. Следо-
вательно, окружность (16.41) представляет собой поперечное се-
чение кругового цилиндра, для которого базис фотографирования
служит образующей.
Таким образом, если поверхность местности, изобразившейся
на стереопаре, представляет собой цилиндр, а базис фотографирова-
ния совпадает с образующей этого цилиндра, то возникает неодно-
значность взаимного ориентирования снимков.
На практике опасное место может быть при съемке долины,
если ее фланги приподняты относительно середины на величину
к = Н зт
2
ф = Я —— , (16.43)
+ а
3
где а — координата у крайних точек, выбранных для взаимного
ориентирования снимков (рис. 194).
Если местность сфотографирована камерой с нормальным уг-
лом зрения (/ = 200 мм, а = 70 мм), то опасное место может воз-
никнуть при к = 0,1 Я. При съемке широкоугольным аэрофото-
аппаратом (/ = 100 мм, а = 70 мм) опасному месту соответствует
величина к = 0,3 Я.
Для сверхширокоугольной камеры (/ = 70 мм, а = 70 мм) пре-
вышение к, вызывающее неопределенность, равно 0,5 Я. Такие
превышения редко бывают в пределах стереопары. Значит, при-
менение в фотограмметрии сверхширокоугольной оптики почти
полностью исключает неопределенность взаимного ориентирова-
ния.
Неопределенность взаимного ориентирования снимков исследо-
вали Н. Г. Келль, А. С. Скиридов, Г. П. Жуков и Н. И. Соколов.
Н. И. Соколов показал, что точность определения элементов
взаимного ориентирования уменьшается по мере приближения
к опасному месту. В связи с этим он рекомендует при аналитиче-
ском решении задачи вычислять величину общего определителя
285
системы уравнений взаимного ориентирования. Если эта величина
близка к единице, то результат решения уравнений вполне досто-
верный. Если же общий определитель меньше 0,2, то это означает,
что точки стереомодели, выбранные для взаимного ориентирования,
находятся на опасном месте или близко к нему.
Глава 17
ВНЕШНЕЕ ОРИЕНТИРОВАНИЕ МОДЕЛИ
§ 111. Элементы внешнего ориентирования модели
Модель, полученная в результате взаимного ориентирования
снимков, имеет произвольный масштаб и произвольно расположена
в пространстве. Дальнейшей задачей является внешнее ориентиро-
вание модели, которое состоит
в приведении ее к заданному
масштабу и в установке относи-
тельно геодезической системы
координат.
В данной главе рассмотрим
два способа внешнего ориенти-
рования модели: аналитический
и инструментальный на уни-
версальном стереоприборе.
При аналитическом решении
задачи сначала определяют эле-
менты внешнего ориентирования
модели, а затем от фотограммет-
рических координат точек моде-
ли переходят к геодезическим.
На приборе сначала тоже опре-
деляют элементы внешнего ориентирования модели, а по этим эле-
ментам устанавливают модель относительно планшета (см. § 132).
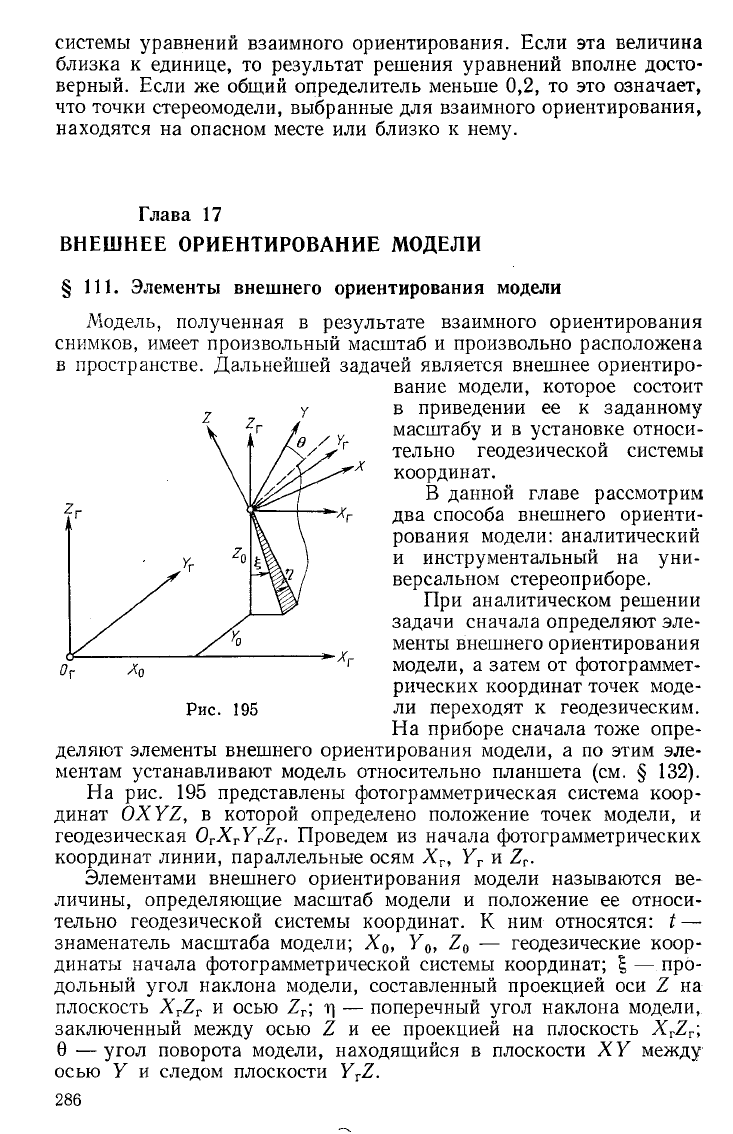
На рис. 195 представлены фотограмметрическая система коор-
динат 0ХУ2, в которой определено положение точек модели, и
геодезическая 0
Г
Х
Г
У
Г
2
Г
. Проведем из начала фотограмметрических
координат линии, параллельные осям Х
г
, У
г
и 2
Г
.
Элементами внешнего ориентирования модели называются ве-
личины, определяющие масштаб модели и положение ее относи-
тельно геодезической системы координат. К ним относятся: I—•
знаменатель масштаба модели; Х
0
, У
0
, 2
0
— геодезические коор-
динаты начала фотограмметрической системы координат; | — про-
дольный угол наклона модели, составленный проекцией оси 2 на
плоскость Х
Т
2
Г
и осью 2
Г
; т| — поперечный угол наклона модели,
заключенный между осью 1 и ее проекцией на плоскость Х
Г
2
Г
;
0 — угол поворота модели, находящийся в плоскости ХУ между
осью У и следом плоскости У
т
2.
Рис. 195
286
Итак, внешнее ориентирование модели определяется семью
элементами. Чтобы найти эти элементы, нужно иметь не менее трех
опорных точек.
§ 112. Аналитический способ внешнего ориентирования
модели
Если известны элементы внешнего ориентирования модели, то
геодезические координаты какой-либо точки местности, изобразив-
шейся на этой модели, можно найти по формулам
Х
г
= Х
0
+ &Х
Т
= Х
0
+ (а
г
Х + а
2
У + а
3
2) I; 4
К
г
= К
0
+ДК
г
= К
0
+(й
1
Х + й
г
К + ад^ (17.1)
2
г
= 2„ + Д2
Г
= 2
0
+ (с,Х + с
2
У + с
3
2) ]
где Х
0
, У о, — геодезические координаты начала О системы фо-
тограмметрических координат (см. рис. 195); ДХ
Г
, АУ
г
, А2
Г
—
приращения геодезических координат определяемой точки относи-
тельно точки О; X, У, 7, — фотограмметрические координаты точки
модели, I — знаменатель масштаба модели; щ, Ь
{
, а — направ-
ляющие косинусы.
Направляющие косинусы зависят от угловых элементов внеш-
него ориентирования модели I, т] и 0. Так как эти углы аналогичны
элементам внешнего ориентирования снимка а, со и к, то согласно
формулам (9.8) напишем
а
х
= соз | соз 6 — зт | зШ
11
зт 0;
а
2
= — соз | зт 6 — зт зт
г)
соз 0;
а
3
= — зт | соз г);
Ь
х
= соз
т]
зт 0; 6
2
= соз
11
соз 6;
, . I (17.2)
0
3
= — зт г);
= зт | соз 0 + соз \ зт
1)
зт 0;
С
2
=
— 31П ^ 3111 0
+
СОЗ
|
31П 1) СОЗ
0;
С
3
=
СОЗ
|
СОЗ У].
Теперь допустим, что известны приближенные значения элемен-
тов внешнего ориентирования модели. Обозначим их так: Х'
0
, У6,
2'о, I',
V, 0', Г.
Найдем поправки к этим величинам: 8Х
0
, 8У
0
, 62
0
, 6Н, б)],
60, 6*.
В этом случае вместо (17.1) можно написать
, дХ
?
„V , дХ
г
<,<.
, дХ
г
с . дХ
г
с
а
. дХ
г
<,,
Х
г
= Х
п
А~ &Х
Г
6Х„
Н
о| 01] - 60
Ч
Ы;
0 г
дХ
0
д1 дц дВ
(17.3)
287
где ДХг, АУг и А2р — приращения геодезических координат, вы-
численные по приближенным значениям элементов внешнего ори-
ентирования модели.
Найдем частные производные. Согласно (17.1) и (17.2)
д2
г
_ д.
д2
0
а
х
•
дХ
г
. . дУ
т
_
•
= 1, Ьу = —— = 1,
ах-
дХ
0
дХ
т
дУ
п
с 2
••
• ( — 31П
|
СОЗ 6 — СОЗ
|
ЗШ Т] 31П
0) Х( +
+
(31П
|
51П
0 —
СОЗ
|
31П Т] СОЗ
0) У1 + (
— СОЗ
|
СОЗ Г))
И
••
Аналогично вычислим остальные частные производные. В ре-
зультате получим
ьу; „ _ дг
т
_
д2
0
а
х
=
а
х
=
ёу =
дХ
0
дХ
т
д1
дХ
Г
<36
дУ
т
дЪ
дУ
т
= 1; Ь
у
=
= - А 21;
дУ,
= 1; с
2
1
ал'г
дт)
= — ДУ.зш^;
:
(а
2
Х — а
х
У) и е
х
=
дУ
дХ
г
= 0; е
у
=
•
дг)
[
У
= 21*. = (Ь
2
Х-Ь
1
У)Ь 8У
ы
= -ДК^ВТ!-
дУ
г
= Л*
г
;
1
а
г
=
к
дО
д.2
дЪ
дг,
СОЗ Т|
- д У!
•АХ
Г
;
дг
т
дт]
д1
—
ДУ' соз |;
дв
(17.4)
Теперь напишем уравнения поправок
ах&Х о + а
х
&1 + е
х
8ц + /х80 + ВхЫ +
1
х =
Ь
у
8У
0
+ а
у
6Ъ + еубт) + /
у
б0 + ёу81 + 1у = V
У
•,
с/б2
0
+ а
2
61 + е
2
8г) + /
2
б0 + +1
г
=
Уг>
где
(17.5)
ДХ
У
0
+ДУ
Г
-У
Г
;
1
г ~
2
о
_
Д2
Г
-2
Г
.
(17.6)
Одна опорная точка позволяет составить три уравнения (17.5)
с семью неизвестными. Следовательно, для внешнего ориентирова-
ния модели необходимо иметь не менее трех опорных точек. Две из
них должны быть определены в плане и по высоте, а для третьей
достаточно найти только высоту. Тогда по формулам (17.5) можно
составить семь уравнений, в результате решения которых найдем
неизвестные.
288
Пусть число точек больше необходимого. Тогда уравнений
(17.5) будет больше числа неизвестных. В этом случае задачу можно
решить по способу наименьших квадратов с оценкой точности оп-
ределения неизвестных.
Составим уравнения (17.5) для каждой опорной точки. Для
этого по приближенным значениям угловых элементов внешнего
ориентирования модели г| и 0 (начальное приближение) вычис-
лим направляющие косинусы, применив формулы (17.2). Затем
в соответствии с (17.1) получим приращения геодезических коор-
динат ДХг, ДУг и Д2г для опорных точек и найдем коэффициенты
по формулам (17.4), а также свободные члены (17.6). Наконец, на-
пишем уравнения поправок (17.5).
Уравнения решим путем последовательных приближений под
условием [рю
2
] — тшп. От уравнений поправок перейдем к нор-
мальным уравнениям, после решения которых получим поправки
к начальному приближению неизвестных. Введя эти поправки, най-
дем первое приближение неизвестных. Используя это приближение,
вновь вычислим направляющие косинусы, приращения геодезиче-
ских координат, коэффициенты и свободные члены, составим урав-
нения поправок и нормальные уравнения и т. д. до тех пор, пока
поправками к неизвестным можно будет пренебречь.
После определения элементов внешнего ориентирования модели
перейдем по формулам (17.1) от фотограмметрических координат
точек модели к геодезическим координатам соответствующих то-
чек местности.
Если положение опорных точек определено в системе координат
Гаусса, то в полученные выше формулы вместо Х
т
и У
г
подставляются
У
Р
и Х
т
соответственно. Такая замена необходима потому, что фо-
тограмметрическая система координат правая, а система координат
Гаусса левая.
Изложенный выше способ можно применять при любых значе-
ниях элементов внешнего ориентирования модели.
Рассмотрим частный случай, когда элементы I, т] и 0 малы, а I
близко к единице. В этом случае за начальное приближение можно
принять: | = Т1= 0 = 0, I = 1. Тогда согласно (17.2) направляю-
щие косинусы а
г
= Ь
2
= с
3
— 1, а остальные равны нулю. Учиты-
вая это, подсчитаем по формулам (17.4) и (17.6) значения коэффи-
циентов и свободных членов, а затем составим уравнения поправок
6Х
0
-2\ - + ХЫ + 1
Х
=
6 У
0
— 2ц + Х9 + УЫ + 1у = Vу^,
(17.7)
где
(17.8)
Ю Зак. 1505 289