Lima J.J.Pedroso, de (ed.). Nuclear Medicine Physics
Подождите немного. Документ загружается.


358 Nuclear Medicine Physics
• x
1
density of substance in compartment 1.
• x
2
density of substance in compartment 2.
Applying the principle of mass conservation, we will have
1. For compartment 1, Equation 7.47:
dM
1
dt
=−K
12
M
1
+K
21
M
2
−K
10
M
1
+u
1
; (7.47)
2. For compartment 2, Equation 7.48:
dM
2
dt
=+K
12
M
1
−K
21
M
2
−K
20
M
2
+u
2
. (7.48)
These equations can be written with regard to the concentrations x
1
and x
2
.
Since x
1
= M
1
/V
1
and x
2
= M
2
/V
2
, we have Equations 7.49 and 7.50,
dx
1
dt
=−k
1
x
1
+k
21
x
2
+w
1
, (7.49)
dx
2
dt
=+k
12
x
1
−k
2
x
2
+w
2
, (7.50)
where k
1
= K
12
+K
10
, k
2
= K
21
+K
20
, k
21
= K
21
V
2
/V
1
, and k
12
= K
12
V
1
V
2
.
7.1.2.8 State, State Space, and State Equations
Some elementary attributes of a system are very important and of themselves
they provide a sufficiently precise image of the system behavior at a given
instant. The temperature in a greenhouse, the speed of a car, the population
of a species, the level of a reservoir, the concentration of a substance, etc., are
examples of this. These attributes are called state variables, and they synthe-
size the past history of the system. For the mathematical representation, we
define a vector x, called the state vector, whose n components x
i
, i = 1, ..., n,
are the state variables (Equation 7.51)
x =[
x
1
x
2
··· x
n
]
T
. (7.51)
As we will see, the state is a synthesis of the past history of the system: the
present state results from all its past evolution. In a dynamic system, the state
will change over time. If graphically represented, it traces a trajectory in the
n-dimensional space, called the state space. If we can rigorously foresee the
future behavior of the system when its exact initial state is known, we have a
deterministic system; otherwise, the system is nondeterministic, probabilistic,
or stochastic.

Systems in Nuclear Medicine 359
The representation in the state space is developed in the time domain. The
state equations are derived from the differential equations describing the sys-
tem; the state equations themselves are first-order differential equations. In
the pulmonary inhalation or exhalation model, where the state variable x
1
is the value of the volume V
L
, the system input u is P(t), and the system
output y (which we want to observe) is the pulmonary volume, we obtain
Equation 7.52,
˙
V
L
(t) +aV
L
(t) = bP(t)
x
1
Δ
= V
L
u
Δ
= P(t) y
Δ
= V
L
˙
x
1
=−ax
1
+bu
y = x
1
(7.52)
as the state equation, which is a first-order linear differential Equation with
constant coefficients (and so time invariant), complete because it has an exter-
nal input (also called exogenous input) u(t) and an algebraic equation as the
output equation. The state variable must express the memory of the system,
and it is generally associated with the quantity of mass or energy stored in the
system. In this example, this variable is the pulmonary volume (associated
with the amount of air).
Example 7.3 Glucose metabolism
Glucose metabolism in blood can be approximated by the simplified
Ackerman’s model described below [12]:
dg
dt
=−m
1
g −m
2
h +J(t)
dh
dt
=−m
3
h +m
4
g +K(t),
(7.53)
where g is the deviation of the glucose level from the recommended one, h is
the deviation of the insulin level from the recommended one, J represents the
experimental rate of glucose infusion, and K isthe experimental rate of insulin
infusion. The parameters are m
1
, m
2
, m
3
, and m
4
characteristic constants of
each individual.
Choosing the state variables as x
1
= g, x
2
= h, which relate to the mass
storage in the system, and defining the system inputs as u
1
= J, u
2
= K,we
obtain Equations 7.54 and 7.55.
dx
1
dt
=−m
1
x
1
−m
2
x
2
+u
1
(t), (7.54)
dx
2
dt
=−m
3
x
1
+m
4
x
2
+u
2
(t). (7.55)

360 Nuclear Medicine Physics
Rewriting Equations 7.54 and 7.55 in matrix form, we have Equation 7.56.
˙
x
1
˙
x
2
=
−m
1
−m
2
−m
3
+m
4
x
1
x
2
+
10
01
u
1
u
2
. (7.56)
In the case of the two-compartmental models, we had obtained Equa-
tion 7.57.
dx
1
dt
=−k
1
x
1
+k
21
x
2
+w
1
dx
2
dt
=+k
12
x
1
−k
2
x
2
+w
2
.
(7.57)
In matrix form, we have Equation 7.58,
˙
x
1
˙
x
2
=
−k
1
k
21
+k
12
−k
2
x
1
x
2
+
10
01
u
1
u
2
, (7.58)
or, even more simply, Equation 7.59.
˙
x = Ax +B. (7.59)
Example 7.4 Predator–Prey Model
In the Lotka–Volterra model analyzed earlier, we have Equation 7.60,
dx(t)
dt
= ax(t) − bx(t)y(t)
dy(t)
dt
=−cy(t) +px(t)y(t).
(7.60)
Choosingx
1
andx
2
asthe state variables,the twopopulations (accumulation
of mass), and substituting and simplifying the notation, we obtain Equation
7.61,
x
1
Δ
= x (prey) x
2
Δ
= y (predators)
dx
1
(t)
dt
= ax
1
(t) −bx
1
(t)x
2
(t)
˙
x
1
= ax
1
−bx
1
x
2
dx
2
(t)
dt
=−cx
2
(t) +px
1
(t)x
2
(t)
˙
x
2
=−cx
1
+px
1
x
2
.
(7.61)

Systems in Nuclear Medicine 361
which are two state equations, time invariant (because their coefficients are
constant over time). In this case, there is no external input; and as a conse-
quence, the equations are homogeneous. They are also nonlinear, because
they have products of state variables on the right-hand side.
It is common practice to designate the two populations as the output of the
system, as that is what we want to observe. So we may have
output 1 : y
1
= x
1
output 2 : y
2
= x
2
.
(7.62)
A similar development can be made for all the systems described by dif-
ferential equations. If we have a differential equation of an order n greater
than one, we reduce it to a set of n first-order differential equations. Then
we can state that the generalized structure of a model for a continuous sys-
tem, regardless of its nature, is composed of a set of n first-order differential
equations, with m external inputs. Using a generic notation, we then have
Equation 7.63,
dx
i
dt
= f
i
(
x
1
(t), ..., x
n
(t), u
1
(t), ..., u
m
(t), t
)
with i = 1, ..., n, (7.63)
where the f
i
are continuous functions of their arguments. The initial con-
ditions needed to define the initial state of the system (its memory) are in
Equation 7.64.
x
i
(t
0
) = x
i0
, i = 1, ..., n. (7.64)
We will have also a set of r output equations r outputs (Equation 7.65)
y
i
(t) = g
i
(
x
1
(t), ..., x
n
(t), u
1
(t), ..., u
m
(t), t
)
with i = 1, ..., r. (7.65)
where the measured output variables are expressed as functions of the n state
variables and of the m input variables. There is no mandatory general relation
between the dimensions of the state, input, and output vectors; but in most
cases, n max(m, r).
If f
i
or g
i
explicitly depends on t, for some i, as in Equation 7.66
˙
x
1
=−2x
1
e
−t
+3u (7.66)
then the system is time varying. If this is not the case, then the system is time
invariant.
If there is no external input u(t), the functions f
i
have the single argument
x
i
, and the system is said to be autonomous [14] (depending only on itself).
In the functions g
i
, the input u(t) enters as an argument only exceptionally.
The input influences the output through the state variables and not directly.
362 Nuclear Medicine Physics
The outputs are, therefore, usually functions only of the state. The outputs
are those system variables that we want to observe or compute.
In matrix notation, we can write Equation 7.67.
x =[x
1
, ..., x
n
]
T
(
state vector
)
y =[y
1
, ..., y
n
]
T
(output vector)
u =[u
1
, ..., u
m
]
T
(input vector)
x =[x
10
, ..., x
n0
]
T
(initial state vector),
(7.67)
and the vector of functions in Equation 7.68.
f (x, u) =
⎡
⎢
⎢
⎢
⎢
⎣
f
1
.
.
.
f
n
⎤
⎥
⎥
⎥
⎥
⎦
g(x, u) =
⎡
⎢
⎢
⎢
⎢
⎣
g
1
.
.
.
g
r
⎤
⎥
⎥
⎥
⎥
⎦
. (7.68)
The model in the state space is then defined by a state equation with initial
conditions and an output Equation 7.69.
˙
x = f (x, u), x(t
0
) = x
0
y = g(x, u).
(7.69)
If the functions f
i
and g
i
are linear and invariant, we have Equation 7.70,
f
i
(x, u) = a
i1
x
1
+a
i2
x
2
+···+a
in
x
n
+b
i1
u
1
+···+b
im
u
m
, i = 1, ..., n
g
i
(x, u) = c
i1
x
1
+c
i2
x
2
+···+c
in
x
n
+d
i1
u
1
+···+d
im
u
m
, i = 1, ..., r,
(7.70)
where a
ij
, b
ij
, c
ij
, and d
ij
are constant coefficients.
The state equation takes the matrix form Equation 7.71,
˙
x = Ax +Bu x(t
0
) = x
0
y = Cx +Du,
(7.71)
which can be represented by the block diagram of Figure 7.11.
The matrixes in Equation 7.71 are
• A = n ×n state matrix;
•
B = n ×m input matrix, or command matrix, or control matrix;
• C = r ×n output matrix or observation matrix;
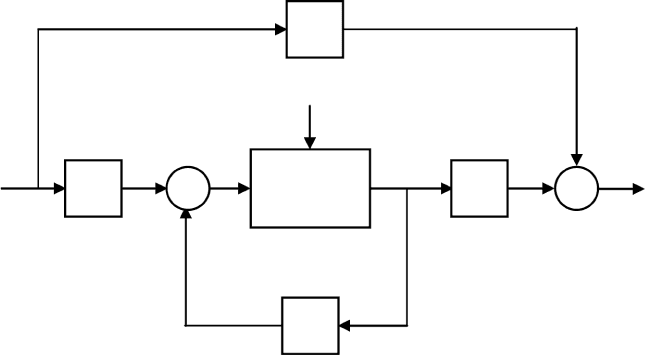
Systems in Nuclear Medicine 363
D
Initial
conditions
(memory)
Integrator
+
+
+
u
B
.
x
y
x
A
C
FIGURE 7.11
Block diagram of the state space representation. D is usually null.
•
D = r × m feed forward matrix;
• u = input vector, or command vector, or control vector, dimension
m; and
• y = output vector, dimension r.
In the SISO (Single Input Single Output) case, B is a column vector b, and
C is a row vector c
T
; and Equation 7.71 becomes Equation 7.72.
˙
x = Ax +bu x(t
0
) = x
0
y = c
T
x +du,
(7.72)
However, Equation 7.71 can also be used for the SISO case.
If the matrixes A, B, C,orD contain elements that vary over time, the system
is time varying (some coefficients a
ij
, b
ij
, c
ij
,ord
ij
vary over time); and we can
then write A(t), B(t), C(t), and e D(t), where t is an explicit argument.
The matrix D expresses the instantaneous influence of the input in the
outputs, before the influence of the state is noticed. That is why D is called
feed forward matrix: its influence bypasses the differential systems and goes
directly to the output. In normal physical systems, containing some source
of inertia, this instantaneous influence does not exist, and D is null. Think
about a car, for instance: changing the position of the accelerator (the input
signal) does not cause an instant change in speed; the reaction time is always
nonnull, unless the power of the engine is infinite ...There is no feed forward
action when there is some inertia.
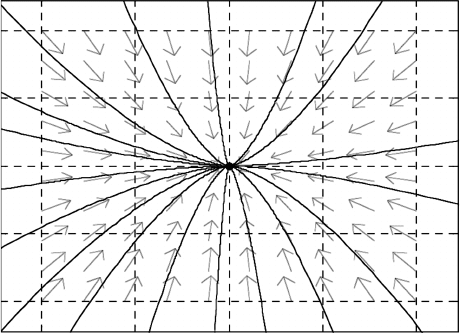
364 Nuclear Medicine Physics
x´ = –2x + uu = 0
y´ = –2y + u
1
0.5
–0.5
–1
–1 –0.5 0
x
y
0.5 1
0
FIGURE 7.12
Stable sink (eigenvalues: −2; −3).
The state space is the real space X
n
with dimension n, a subspace of R
n
. The
state is a point in this space, and its coordinates are the state variables values.
When the state moves in the state space, it describes a trajectory, which
is the state trajectory. Some authors call the bi-dimensional state space phase
space and the trajectory in the phase space phase trajectory (we will come back
to this later in this chapter).
The state equation is a set of first-order differential equations, where n is
the number of state variables (the number of attributes needed to describe
the memory of the system).
7.1.2.9 How to Choose the State Variables
The first step in the application of this theory to a concrete system is to choose
the state variables. It should be stressed that there is neither a general rule nor
a single way to do it. In practice, there are often several possible choices. When
the state variables represent measured observable attributes, they are called
physical variables. The choice of physical variables is generally based, as in
previous examples, on the attributes of the elements storing energy or mass
that synthesize the history of the system. In fact, since all physical phenomena
are transformations of mass or energy, the present state of mass and energy
stores in a given process is the result of everything that has happened to the
system since its creation.
Systems in Nuclear Medicine 365
7.1.2.10 Solution of the Linear State Equation in the Time Domain
7.1.2.10.1 Solution of the Homogeneous State Equation
Consider the state equation of a linear invariant system Equation 7.73,
˙
x = Ax +Bu. (7.73)
The homogeneous equation is obtained by making u = 0, resulting in an
unforced (autonomous) system Equation 7.74.
˙
x(t) = Ax(t) (7.74)
Integrating both sides of the equation, we get Equation 7.75
x(t) =
t
0
Ax(t)dt +x
0
. (7.75)
However, the integral in Equation 7.75 is recurrent in x(t), and we can write
Equation 7.76:
x(t) =
t
0
Ax(t)dt +x
0
=
t
0
A
⎛
⎝
t
0
Ax(t)dt +x
0
⎞
⎠
dt +x
0
=
t
0
A
⎛
⎝
t
0
A
⎛
⎝
t
0
Ax(t)dt +x
0
⎞
⎠
dt +x
0
⎞
⎠
dt +x
0
=···
= x
0
+
t
0
Ax
0
dt +
t
0
t
0
AAx
0
dt+
t
0
t
0
t
0
AAAx
0
dt +···
= x
0
+Ax
0
t
0
dt +A
2
x
0
t
0
t
0
dt+A
3
x
0
t
0
t
0
t
0
dt +···
= x
0
+Ax
0
t +A
2
x
0
t
2
2!
+A
3
x
0
t
3
3!
+···+A
k
x
0
t
k
k!
+···
=
1 +At +A
2
t
2
2!
+A
3
t
3
3!
+···+A
k
t
k
k!
+···
x
0
.
(7.76)
Comparing Equations 7.76 and 7.77
e
at
= 1 +
at
1!
+
(at)
2
2!
+···+
(at)
k
k!
+···. (7.77)

366 Nuclear Medicine Physics
we can write Equation 7.78:
x(t) = e
At
x(t), (7.78)
and, due to that, e
At
is called the matrix exponential.
Note that the exponential of the matrix A is not made up of the exponentials
of the elements of A.
The matrix exponential is called the state transition matrix, Φ(t), and we
can write Equation 7.79.
x(t) = Φ(t)x(0). (7.79)
Knowing the initial condition, to compute the state in any future instant, it is
sufficient to multiply the initial state by the state transition matrix. This gives
it its name.
How can we compute e
At
?
Computationally, we can calculate term by term, as in Equation 7.80,
e
At
= I + At +A
2
t
2
2!
+A
3
t
3
3!
+···+A
k
t
k
k!
+···, (7.80)
until the value of the next one is practically null.
However, it would be more useful to look for another solution that is eas-
ier to compute; and that would give us, moreover, some explicit indications
about the properties of the system.
This solution exists and is based on the eigenstructure of the state matrix:
• The eigenvalues;
• The left eigenvectors; and
•
The right eigenvectors.
Let us consider again the homogeneous equation 7.81
˙
x(t) = Ax(t). (7.81)
One possible solution for this system is where
˙
x and x have the same direc-
tion in state space, differing only in their amplitudes by a proportionality
factor. The solution will be of the form (Equation 7.82),
˙
x = λx. (7.82)
Substituting Equation 7.82 into Equation 7.81 leads to Equation 7.83.
λx = Ax ⇔[λI −A]x = 0. (7.83)
Systems in Nuclear Medicine 367
If some value x = 0 satisfies this equation, it is a nontrivial solution, and we
will necessarily have Equation 7.84.
Q(λ) = det[λI −A]=0 ⇔
|
λI − A
|
= 0. (7.84)
If A has order n, Q(λ) is the characteristic polynomial of A, and the result-
ing polynomial equation is the characteristic equation of A, with the form
(Equation 7.85).
Q(λ) = λ
n
+a
n−1
λ
n−1
+···+a
1
λ +a
0
= 0 (7.85)
The roots of the characteristic equation are the eigenvalues of the matrix
A. A root can be simple or repeated with a multiplicity p. A root can be real
or complex. If roots are complex, they must appear in conjugate pairs, as the
coefficients of the characteristic equation are real numbers.
When the roots are distinct, the polynomial Q(λ) can be written as
Equation 7.86.
Q(λ) = (λ − λ
1
)(λ −λ
2
) ···(λ −λ
n
) (7.86)
The product of the eigenvalues of the matrix A is equal to its determinant.
Their sum equals the trace of the matrix (sum of the elements of the principal
diagonal).
The nonnull vectors x that verify Equation 7.87
Ax = λx, (7.87)
are the right eigenvectors of A.
For each distinct eigenvalue there is a corresponding eigenvector, and the
n distinct eigenvectors are linearly independent. If there is an eigenvalue of
multiplicity p, the number of associated eigenvectors may vary from 1 to p,
depending on the properties of the matrix.
Note that if x is an eigenvector, λx, for any λ ∈ IR, is too. It can be proved
by the definition.
The left (or reciprocal) eigenvectors of the matrix A are the vectors w
i
,
(associated with the eigenvalues λ
i
, i = 1, ..., n) verifying the Equation 7.88
w
T
i
A = λ
i
w
T
i
ou w
T
i
[λ
i
I − A]=0. (7.88)
If w
i
is an eigenvector, so is μw
i
, for any μ ∈ R.
It can be proved that the solution of the homogeneous state equation using
the eigenstructure is given by Equation 7.89, if all the eigenvalues are simple
and distinct.
x(t) =
⎡
⎣
n
j=1
e
λ
j
t
.v
j
w
T
j
⎤
⎦
x(0) = e
λ
1
t
v
1
w
T
1
x(0) + e
λ
c
t
v
2
w
T
2
x(0) +···
+e
λ
n
t
v
n
w
T
n
x(0). (7.89)