Лекции по гидрогазодинамике
Подождите немного. Документ загружается.

dx
∂ K
∂ t
= Q
k
+ ω
k
.
dV = S · dx
dK = dm · v = ρ · dV · v = ρ · v · S · dx.
∂ K
∂ t
=
∂
∂ t
(ρ · v · S) · dx.
Q
k
(x) = G · v
Q
k
(x + dx) = G(x + dx) · (v + dv)
G(x + dx) = G(x) + dG,
dG
dQ
k
= dG · v v
Q
k
(x + dx) − dQ
k
− Q
k
(x) = (G(x) + dG) · (v + dv) − dG · v −G · v =
= G · dv − dG · (v −v).
p(x) · S(x) (p + dp) · (S + dS)
σ · S
−dp
σ · S = dp · S.
dL
dL = dL + dψ.
G · dL = G · dL + G · dψ.
v
G dL = G · dF v; G · dψ = G dF v
dF , dF
dx
∂
∂ t
(ρ · v · S) · dx + G · dv − dG · (v − v) =
= −G · dF − G ·dF − dp · S − dp · S.
∂ K/∂ t = 0
v
d
v
2
2
+
dp
ρ
+ dL + dψ + dL +
dG
G
v (v − v ) = 0.
d G = 0
Z
V
ρ d V =
∂
∂ t
Z
V
ρ e dV +
I
S
e ρ (~v ~n) d S =
Z
V
ρ
~
F ~v d V +
I
S
σ ~n d S + Q.
e = u + v
2
/2
Q
V ∆ x
∂
∂ t
(ρ e S) +
∂
∂ x
"
ρ v S
e +
p
ρ
!#
= m
∗
e
∗
+
p
∗
ρ
∗
!
π D − ρ g v S
d y
d x
+
+π D q +
∂
∂ x
λ
∂ T
∂ x
S
!
.
q /
2
T
T
cp
α
q = α (T − T cp)
∂ ρ
∂ t
+
∂ (ρ v)
∂ x
=
4 m
∗
D
;
∂ (ρ v)
∂ t
+
∂
∂ x
p + ρ v
2
= −ρ
g y
0
+
λ v |v|
2 D
;
∂ (ρ e)
∂ t
+
∂
∂ x
ρ v
e +
p
ρ
!
=
4 q
D
− ρ v g y
0
+
+
4 m
∗
D
e +
p
ρ
!
.
v = 0
dp
ρ
+ dψ = 0.
Z
dp
ρ
+ ψ = const.
ρ = const,
Z
dp/ρ = p/ρ + const
p
ρ
+ ψ = const.
ψ = g z z
p = −ρ g z + const.
p = const
z
p|
z=0
= p
0
, const = p
0
,
p = p
0
− ρ g z.
h
z
h = −z
p = p
0
+ ρ g h.
p
0
p = ρ g h
ρ g
p
ρ g
+ z =
p
0
ρ g
+ z
0
= H = const.
p/(ρ g)+z = H
H H
m
m g = 1
h
p = p − p p
p
p = p − p = ρ g h.
h =
p − p
ρ g
.
~
F
p
= −
Z
(S)
p ~n dS,
~n
F
p
=
Z
(S)
p dS =
Z
(S)
(p
0
+ ρ g h) dS.
F
p
=
Z
(S)
(p
0
+ ρ g h) dS = (p
0
+ ρ g h ) S = p S.
h
~w m
~
F = −m ~w.
z ω = ,
ψ = −ω
2
r
2
/2 r
ψ = ψ + ψ = g z −
ω
2
r
2
2
.
p
ρ
+ g z −
ω
2
r
2
2
= const.
z
p|
(
r=0,
z=z
0
)
= p
0
,
const = p
0
/ρ +g z
0
p = p
0
− ρ g (z − z
0
) +
ρ ω
2
r
2
2
,
p|
S
= p
0
z − z
0
=
ω
2
r
2
2 g
,
m ~g m ω
2
~r
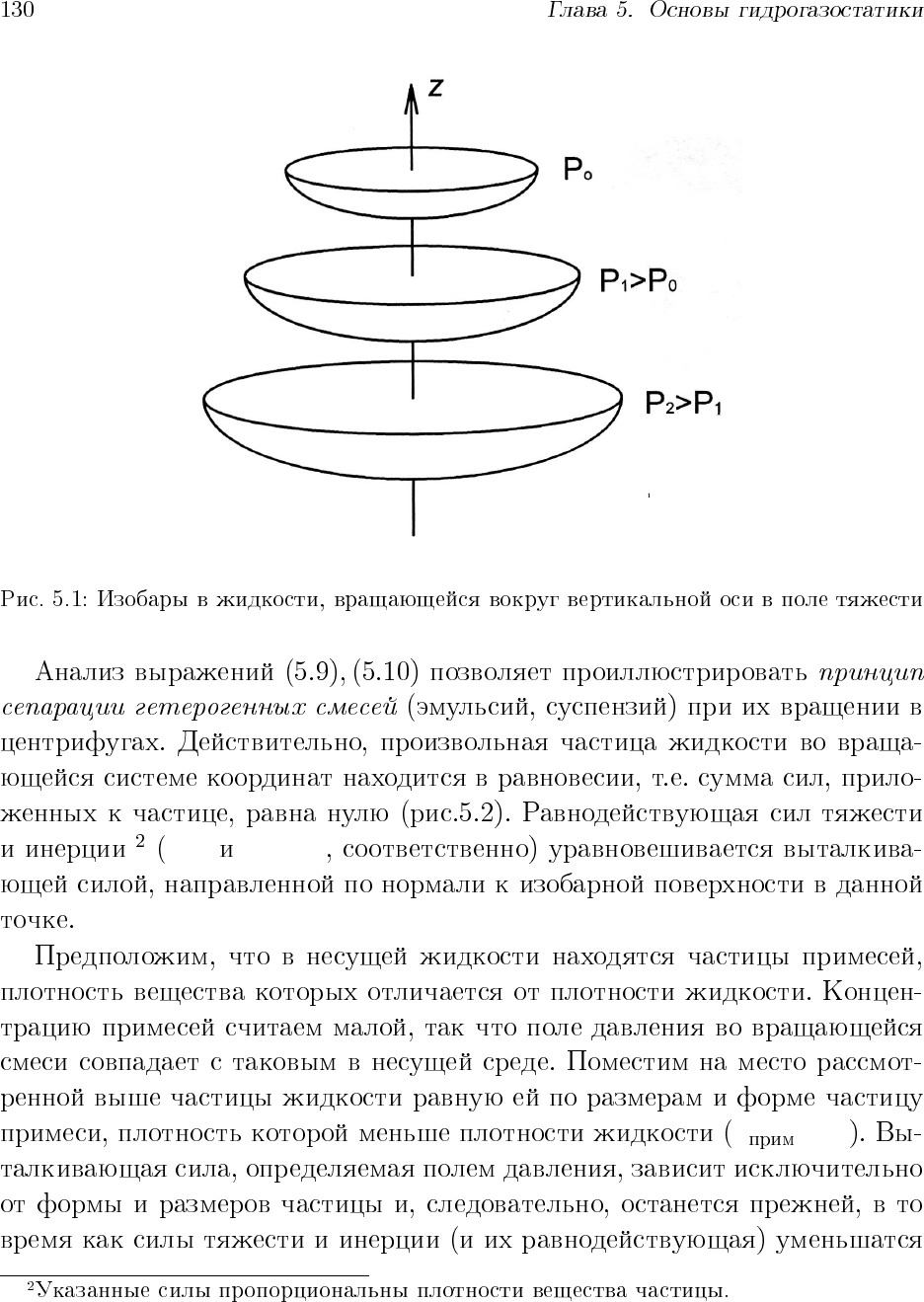
ρ < ρ