Лекции по гидрогазодинамике
Подождите немного. Документ загружается.

dx
v
x
=
dy
v
y
=
dz
v
z
.
~v = ~v(~r, t)
t
~v 6= 0
~v = 0
S
~v dS
~n
~v
dS ~v
dS h
~v ~n dQ = h dS
h h = ~v ~n
dQ = (~v ~n) dS
S
Q =
Z
(S)
~v ~n dS =
Z
(S)
v
n
dS.
S
Q =
I
(S)
~v ~n dS =
I
(S)
v
n
dS.
V
V
(~v · ~n) > 0
(~v · ~n) < 0
G, /c S
G =
Z
(S)
ρ (~v ~n) dS =
Z
(S)
ρ v
n
dS,
V
G =
I
(S)
ρ (~v ~n) dS.
S V
V
Q
V
=
1
V
I
(S)
~v ~n dS.
V
M
S V
M ~v
M div ~v
(div ~v)
M
= lim
(
V →0
V →M
)
1
V
I
(S)
~v ·~n dS.
S
div ~v
div ~v =
∂v
x
∂x
+
∂v
y
∂y
+
∂v
z
∂z
.
∇ div ~v
div ~v = ∇~v.
~v ~v
rot ~v
rot ~v M
~n
~v
(rot ~v)
M
= lim
(
V →0
V →M
)
1
V
I
(S)
[~n ×~v ] dS.
∇
rot ~v
rot ~v = [∇ ×~v ] .
−
−
V
rot ~v
~ω
~v = [~ω ×~r ] .
~v
rot ~v = [∇ ×~v ] = [∇ × [~ω ×~r ]] = 2 ~ω,
rot ~v
rot ~v =
~
i
~
j
~
k
∂/∂x ∂/∂y ∂/∂z
v
x
v
y
v
z
rot ~v =
∂v
z
∂y
−
∂v
y
∂z
!
~
i +
∂v
x
∂z
−
∂v
z
∂x
!
~
j +
∂v
y
∂x
−
∂v
x
∂y
!
~
k.

Z
(V )
div ~v dV =
I
(S)
~v ~n dS.
∇
∇(....) = lim
(
V →0
V →M
)
1
V
I
S
~n (....) dS.
Z
(V )
grad p dV =
I
(S)
~n p dS.
grad U
(grad U)
M
= lim
(
V →0
V →M
)
1
V
I
(S)
~n U dS.
rot ~v
I
(S)
[~n ×~v ] dS =
Z
V
rot ~v dV.
T p
ρ ~v
x, y, z t
T = T (x, y, z, t); ρ = ρ(x, y, z, t);
p = p(x, y, z, t); ~v = ~v(x, y, z, t).
T, ρ, p ~v
ξ
1
, ξ
2
, ξ
3
x = x(ξ
1
, ξ
2
, ξ
3
, t); y = y(ξ
1
, ξ
2
, ξ
3
, t); z = z(ξ
1
, ξ
2
, ξ
3
, t),
T = T (ξ
1
, ξ
2
, ξ
3
, t); p = p(ξ
1
, ξ
2
, ξ
3
, t); ρ = ρ(ξ
1
, ξ
2
, ξ
3
, t).
x, y, z t ξ
1
, ξ
2
, ξ
3
t
x
i
t
∂~v(x
k
, t)/∂t
t
x
k
t + ∆t x
k
∆t t x
k
x
k
+ ∆x
k
i
W
i
= lim
∆t→0
v
i
(x
k
+ ∆x
k
, t + ∆t) − v
i
(x
k
, t)
∆t
=
= lim
∆t→0
"
v
i
(x
k
, t) +
∂v
i
∂x
k
∆x
k
+
∂v
i
∂t
∆t − v
i
(x
k
, t)
#
∆t
lim
∆t→0
∆x
k
∆t
!
= v
k
,
W
i
=
∂v
i
∂t
+ v
k
∂v
i
∂x
k
=
∂
∂t
+ v
k
∂
∂x
k
!
v
i
,
~
W =
∂~v
∂t
+ (~v ∇)~v.
f
df/dt
Df/Dt ∂f/∂t
d
dt
=
∂
∂t
+ (~v ∇).
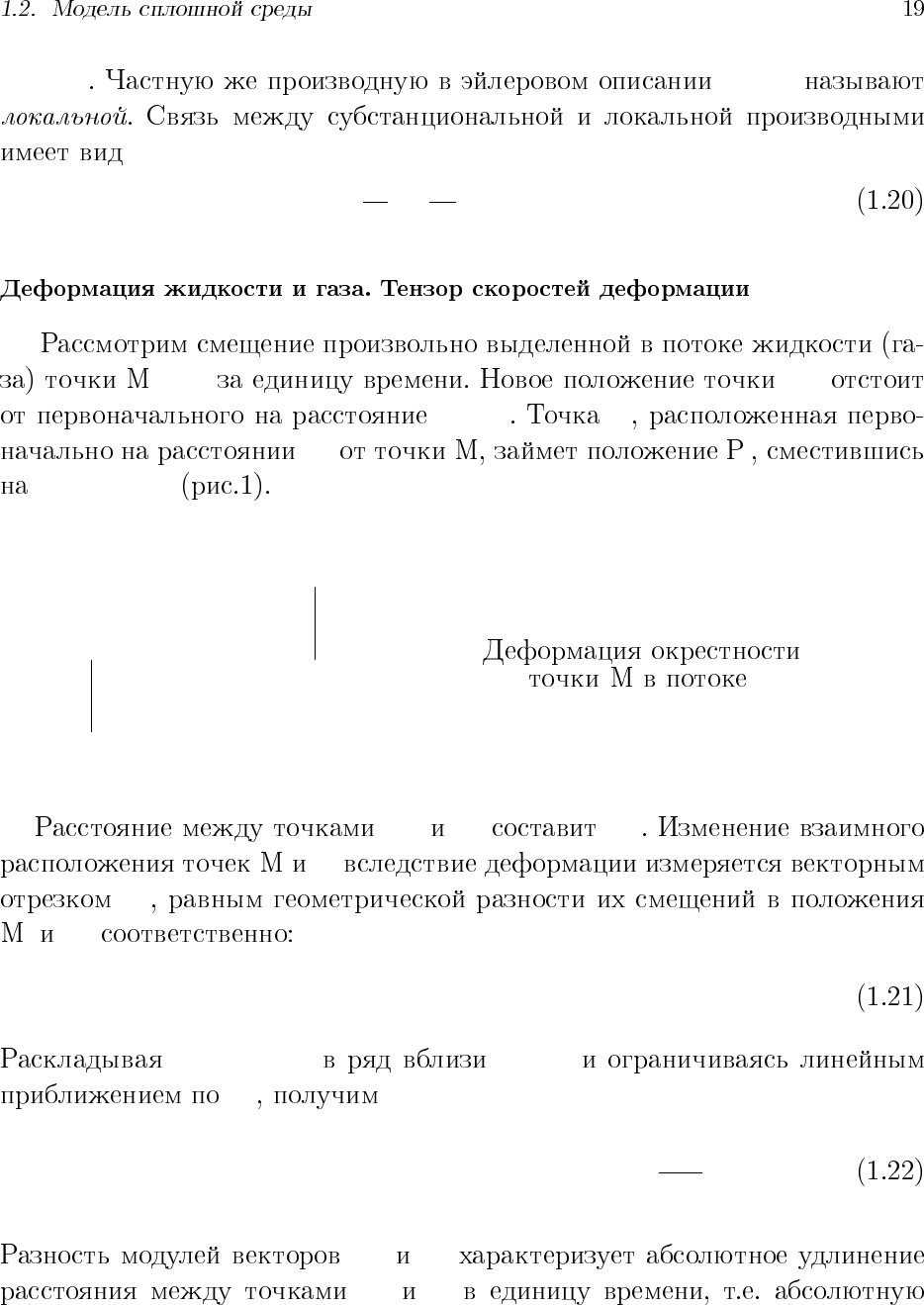
(~r, t) M
0
~v(~r, t) P
d~r
0
~v(~r + d~r, t)
1
M
d~r
~v(r, t)
~v(~r + d~r, t)
M
0
*
P
P
0
d
~
r
0
6
6
d~v
1
M
0
P
0
d
~
r
0
P
d~v
0
P
0
d~v = ~v(~r + d~r, t) −~v(~r, t) = d
~
r
0
− d~r.
~v(~r + d~r, t) ~v(~r, t)
d~r
~v(~r + d~r, t) = ~v(~r, t) + (d~r ∇)~v = ~v(~r, t) +
3
X
k=1
∂~v
∂x
k
dx
k
.
d
~
r
0
d~r
M P
∆L
L
=
|d
~
r
0
| − |d~r |
|d~r |
.
d~r d
~
r
0
~e
~
e
0
|d
~
r
0
| =
~
e
0
·d
~
r
0
|d~r | = ~e·d~r
∆L
L
=
~
e
0
d
~
r
0
−~e d~r
|d~r |
.
d
~
r
0
d~r
~
e
0
≈ ~e
d
~
r
0
= d~r + (d~r ∇)~v
∆L
L
=
~e (d
~
r
0
− d~r)
|d~r |
= ~e(~e ∇)~v.
x, y, z ~e =
~
i,
~
j,
~
k
∆L
L
!
x
=
∂v
x
∂x
,
∆L
L
!
y
=
∂v
y
∂y
,
∆L
L
!
z
=
∂v
z
∂z
.
d~r
1
d~r
2
A A
0
d~r
1
0
d~r
2
0
A
A
0
6
d~r
2
d~r
1
-
:
1
d~r
2
0
d~r
1
0