Lee K.K. Lectures on Dynamical Systems, Structural Stability and Their Applications
Подождите немного. Документ загружается.

the
notion
of
closure
and
closed
sets,
like
those
of
neighborhoods
and
open
sets,
are
relative.
Up
to
now,
we
have
been
considering
the
topological
space,
its
subsets
and
their
properties.
In
the
following,
we
shall
briefly
discuss
the
relationships
between
spaces
and
the
topological
properties
of
spaces.
Let
X
and
Y
be
two
topological
spaces.
A
mapping
f
of
X
into
Y
is
a
rule
which
assigns
to
each
point
p E X a
well
defined
point
f(p)
in
Y.
The
mappping
f
is
continuous
at
p
if,
for
each
neighborhood
U
of
f(p)
in
Y,
there
is
a
neighborhood
V
of
p
in
X
such
that
f(V)
c u.
The
mapping
f
of
X
into
Y
is
continuous
if
it
is
continuous
at
all
points
of
X.
Let
X
and
Y
be
two
topological
spaces,
and
let
f:
X
~
Y
(not
necessarily
continuous),
and
let
X'
be
a
subspace
of
X.
Then
f
induces
a map
f'
of
X'
into
Y,
defined
by
setting
f'(p)=
f(p)
for
all
p
EX'.
f'
is
called
the
restriction
of
f
to
X'.
Note
that
f
and
f'
are
different
mappings,
because
if
only
f'
is
known, f
is
by
no
means
uniquely
determined.
For
example,
f:R
~
R
defined
by
f(x)=
x•
for
all
x E R,
and
X'=
[0,1]
and
f':X'
~
R
by
f'(x)=
x•
for
x E
[0,1].
Clearly
f'
is
a
restriction
off
to
x•.
Let
g:R
~
R
be
defined
by
setting
g(x)
0
for
x <
O,
g(x)
= x•
for
0 S x S
1,
and
g(x)
= 1
for
x >
1.
Clearly
f'
is
also
a
restriction
of
g
to
X'
•
Theorem
2.2.8
Let
X
and
Y
be
two
topological
spaces.
A
map
f:X
~
Y
is
continuous
iff
the
inverse
image
of
every
open
set
in
Y
is
open
in
X.
Note
that
the
inverse
image
is
not
in
general
a
mapping.
If
it
is
to
be
a
mapping,
f
must
be
one-to-one.
Furthermore,
f
is
onto.
But
in
topology,
special
interest
is
attached
to
those
mappings
which
are
not
only
one-to-one
and
onto,
but
also
have
the
property
that
both
the
mapping
and
its
inverse
are
continuous.
Let
X
and
Y
be
two
topological
spaces
and
let
f
be
a
one-to-
one
mapping
of
X
onto
Y.
Then
if
both
f
and
f-
1
are
34
continuous,
f
is
a
homeomorphism
of
X
onto
Y,
and
X
and
Y
are
homeomorphic
under
f.
Clearly,
if
f
is
a
homeomorphism
of
X
onto
Y,
then
f"
1
is
a
homeomorphism
of
Y
onto
X
since
if
g =
f-
1
,
then
g"
1
=
f.
From
Theorem
2.2.8
and
the
definition
just
given,
it
follows
that
a
homeomorphism
of
X
onto
Y
sets
up
a
one-to-one
correspondence
between
the
open
sets
of
X
and
those
of
Y.
The
idea
that
these
two
spaces
are
homeomorphic
to
each
other
under
f
means
that
not
only
that
the
points
are
in
one-to-one
correspondence,
but
also
the
neighborhoods
of
corresponding
points
are
very
similar
to
one
another.
These
are
properties
of
a
topological
space
X
which
depend
only
on
the
definition
of
X
as
a
topological
space
(i.e.,
depend
only
on
the
knowledge
of
which
sets
in
X
are
open),
but
depend
in
no
way
on
any
other
properties
the
elements
of
X may
have.
Such
a
property
is
characterized
by
the
following
definition:
A
property
of
a
topological
space
X
is
a
topological
property
of
X
if
it
also
belongs
to
every
topological
space
homeomorphic
to
x.
Since
two
homeomorphic
spaces
are
to
be
regarded
as
having
the
same
topological
structure,
homeomorphism
(of
spaces)
plays
the
part
in
topology
analogous
to
that
played
by
an
isomorphism
(of
groups)
in
algebra.
we
shall
discuss
some
elementary
topological
properties
which
are
of
considerable
importance
in
topology.
First,
we
would
like
to
generalize
the
notion
of
a
closed
bounded
set
in
a
Euclidean
space
to
other
topological
spaces.
An
important
property
of
Euclidean
spaces
(normally
mentioned
in
analysis)
is
given
by
the
Heine-Borel
theorem:
A
set
A
in
a
Euclidean
space
R"
is
closed
and
bounded
iff
whenever
A
is
contained
in
the
union
of
an
arbitrary
collection
of
open
sets
in
R",
then
it
is
also
contained
in
the
union
of
a
finite
number
of
open
sets
chosen
from
the
given
collection.
One
can
avoid
the
explicit
mentioning
of
the
open
sets
of
the
Euclidean
space
and
the
wording
of
the
theorem
can
also
be
tidied
up
with
the
following
definition.
(This
definition
35
is
not
just
for
tidying
up
the
theorem,
its
importance
will
be
manifested
later).
Let
X
be
any
topological
space,
and
let
F
be
a
family
of
sets
in
X
such
that
X
is
their
union.
Then
F
is
a
covering
of
X.
If
all
sets
in
F
are
open,
then
F
is
an
open
covering
of
X.
If
F
and
F'
are
two
coverings
of
X
such
that
every
set
belonging
to
F'
also
belongs
to
F,
then
F'
is
a
subcovering
of
X.
Then
the
Heine-
Borel
theorem
can
be
restated
as
follows:
A
set
A
in
a
Euclidean
space
is
closed
and
bounded
iff
every
open
covering
of
A
contains
a
finite
subcovering.
We
note
that
the
property
of
being
closed
and
bounded
in
a
Euclidean
space
is
equivalent
to
a
topological
property.
This
topological
property
can
be
formulated
for
any
topological
space.
A
topological
space
X
is
a
compact
space
if
it
is
a
Hausdorff
space,
and
if
every
open
covering
of
X
contains
a
finite
subcovering.
If
A
is
a
set
in
X,
then
A
is
a
compact
set
if
A,
as
a
subspace
of
X,
is
a
compact
space.
So
the
Heine-Borel
theorem
says
that
a
set
A
in
R"
is
compact
iff
it
is
closed
and
bounded.
We
have
just
said
that
because
compactness
(or
a
set
is
closed
and
bounded)
is
defined
entirely
in
terms
of
open
sets,
thus
we
refer
it
to
be
a
topological
property.
But
we
want
to
check
whether
if
a
space
is
homeomorphic
to
a
given
compact
space
is
also
compact.
Indeed,
we
have
the
following
stronger
theorem:
Theorem
2.2.9
Let
f
be
a
continuous
mapping
of
a
topological
space
X
onto
a
topological
space
Y.
Then
if
X
is
compact,
and
Y
is
Hausdorff,
Y
is
compact.
Proof:
Let
F
be
a
given
open
covering
of
Y.
Then
f"
1
of
each
setofF
is
open
in
X
(Theorem
2.2.8),
and
f"
1
(F)
form
a
covering
F'of
X.
F'
is
thus
an
open
covering
of
the
compact
space
X,
so
it
contains
a
finite
subcovering
of
X.
But
the
images
under
f
of
the
sets
in
this
subcovering
of
X
are
known
to
be
sets
of
the
covering
of
F
(from
the
definition
ofF')
and
form
a
covering
of
Y.
Thus
the
given
covering
of
Y
contains
a
finite
subcovering,
and
Y
is
Hausdorff,
so
Y
is
compact.
36
There
are
some
"trivial"
corollaries:
Corollarv
2.2.10
If
X
and
Y
are
homeomorphic
spaces
and
X
is
compact,
so
is
Y.
Corollary
2.2.11
If
f:
X~
Y
is
a
continuous
mapping
of
a
compact
X
into
a
Hausdorff
space
Y,
then
f(X)
is
a
compact
set.
One
of
the
most
important
properties
of
product
spaces
is
given
by
the
Tychonoff
Theorem:
The
product
of
compact
spaces
is
compact.
Next
we
shall
dicuss
and
make
precise
the
idea
based
on
our
observation
that
certain
sets
of
points,
say
in
a
plane,
have
the
property
that
any
two
of
their
points
can
be
joined
by
a
curve
lying
entirely
in
the
set,
while
certain
other
sets
fail
to
do
so.
E.g.,
if
A
is
a
disk,
either
open
or
closed,
it
is
clear
that
every
pair
of
points
of
A
can
be
joined
by
a
curve
(in
fact,
by
a
line
segment)
lying
entirely
in
A.
But
if
A'
be
a
set
consisting
of
two
disjoint
circular
disks,
then
any
path
joining
a
point
of
one
of
these
disks
to
a
point
of
the
other
disk
must
cross
the
gap
between
the
disks,
thus
not
lying
entirely
in
A'.
First,
we
have
to
define
what
is
a
path
or
a
curve.
Let
X
be
a
given
topological
space,
and
I
be
the
unit
interval
0
~
t
~
1,
regarded
as
a
subspace
of
the
space
of
real
numbers
in
the
usual
topology.
Then
a
path
in
X
joining
two
points
p
and
g
of
X
is
defined
to
be
a
continuous
mapping
f
of
I
into
X
such
that
f(O)
= p
and
f(1)
=
q.
The
path
is
said
to
lie
in
a
subset
A
of
X
if
f(I)
c
A.
It
is
important
to
note
that
the
path
is
the
mapping.
A
topological
space
X
is
arcwise
connected
if,
for
every
pair
of
points
p,
q e X
there
is
a
path
in
X
joining
p
and
q.
If
A
is
a
set
in
X,
then
A
is
arcwise
connected
if
every
pair
of
points
of
A
can
be
joined
by
a
path
in
A.
Now
we
shall
show
that
arcwise
connectedness
is
a
topological
property.
Theorem
2.2.12
Let
X
and
Y
be
two
spaces
and
f
is
a
continuous
mapping
of
X
onto
Y.
Then
if
X
is
arcwise
connected,
so
is
Y.
37
To
give
the
proof
is
as
easy
as
giving
an
example,
so
we
opt
for
the
proof.
Let
p
and
q
be
points
in
Y.
Since
f
is
onto,
there
are
points
p
1
and
q•
in
X
such
that
f(p')=
p
and
f(q
1
)=
q.
Since
X
is
arcwise
connected,
there
is
a
path
g
(a
continuous
map)
in
X
joining
p
1
and
q•.
Then
the
composite
map
f·g
is
a
continuous
map
of
I
into
Y
such
that
(f·g)
(0)=
p
and
(f·g)(1)=
q.
[As
an
exercise,
one
can
prove
that
if
X,
Y,
z
are
three
spaces
and
f:X
~
Y,
g:Y
~
Z
are
two
continuous
maps,
then
the
composite
map
g·f
is
a
continuous
map
of
X
into
Z.]
That
is,
f·g
is
a
path
in
Y
joining
p
and
q.
Since
p
and
q
are
arbitrary
points
of
Y,
the
theorem
is
proved.
Corollarv
2.2.13
If
X
and
Y
are
homeomorphic
spaces,
then
X
is
arcwise
connected
iff
Y
is.
That
is,
arcwise
connectedness
is
a
topological
property.
As
we
shall
discuss
shortly,
arcwise
connectedness
is
a
useful
condition
for
a
physical
space.
But
it
is
too
restrictive
for
an
abstract
space.
A much
weaker
and
simpler
condition
in
terms
of
open
sets
is
about
to
be
discussed.
A
topological
space
X
is
connected
if
it
cannot
be
expressed
as
the
union
of
two
disjoint
non-empty
open
sets.
A
set
A
in
X
is
connected
if,
when
regarded
as
a
subspace
of
X
in
the
induced
topology,
A
is
a
connected
space.
Example:
Let
A
consist
of
two
circular
disks
in
the
plane
such
that
the
distance
between
their
centers
is
strictly
greater
than
the
sum
of
their
radii.
Then
A
is
not
a
connected
set.
Theorem
2.2.14
Let
X
andY
be
two
topological
spaces
and
f
is
a
continuous
map
of
X
onto
Y.
Then
if
X
is
connected
so
is
Y.
Corollary
2.2.15
If
X
and
Y
are
homeomorphic,
then
X
is
connected
iff
Y
is.
Thus,
connectedness
is
also
a
topological
property.
As
we
have
pointed
out
earlier,
connectedness
is
weaker
than
arcwise
connectedness,
and
it
is
intuitively
easy
to
realize
the
following
theorem.
Theorem
2.2.16
An
arcwise
connected
space
is
connected.
38
Note
that
the
converse
is
not
true.
For
example:
Let
A
be
the
set
in
the
(x,y)-plane
such
that
y =
sin(1/X)
for
o
~
x
~
1
along
with
the
line
segment
(O,y)
for
-1
~
y
~
1.
Clearly
A
is
connected,
nonetheless
A
is
not
arcwise
connected.
This
is
because
for
any
map f
of
the
interval
o
~
t
~
1
into
A
such
that
f(O)
is
a
point
of
A
with
x + o
and
f(1)
is
a
point
with
x = 0
is
necessarily
discontinuous
at
t
=
1.
But
arcwise
connectedness
requires
the
mapping
f
to
be
continuous
for
0
~
t
~
1.
A
simpler
example
is
the
following:
A=
{(x,y)
I
(O,y):
-1
~
y
~
1;
(x,O):
0
~
x
~
1}.
We
have
introduced
some
basic
concepts
in
point
set
(or
general)
topology.
Before
we
go
on
introducing
some
basic
notions
of
differential
geometry,
let
us
reflect
on
those
concepts
we
have
just
discussed
and
try
to
relate
them
to
the
world
models
(be
they
physical,
biological,
or
social)
we
want
to
construct
and
understand.
As
we
have
discussed
in
the
introduction,
any
world
model
must
be
a
topological
space.
Before
put
more
structure
on
it,
intuition
as
well
as
some
reality
dictates
the
elimination
of
a
few
classes
of
spaces.
(1)
One
would
not
wish
to
construct
a
world
model
based
on
a
non-
Hausdorff
space.
This
is
because
non-Hausdorff
space
will
not
allow
us
to
describe
"distinct
events",
which
are
of
fundamental
importance
in
physical
sciences.
Nor
will
non-T
2
spaces
allow
any
statistical
inference
because
there
is
no
distinct
sampling,
(let
alone
discrete
or
continuous
sampling
spaces),
nor
can
one
construct
such
concepts
as
distribution.
So
the
Hausdorff
property
of
the
space
is
equally
important
for
biological
and
social
sciences.
(2)
Nor
can
one
build
a
model
of
nature
based
on
a
non-connected
space.
This
is
because
no
"communication"
(or
influence)
can
be
carried
out
between
separated
components
or
distinct
events.
It
is
clear
that
such
a
model
is
unacceptable.
As
we
go
along,
we
shall
discuss
a
few
more
restrictions
as
to
the
acceptable
spaces
upon
which
world
models
can
be
39
built.
Next,
we
shall
introduce
some
basic
concepts
in
albegraic
topology
and
familiarize
ourselves
with
some
of
the
terminology
and
fundamental
results.
2.3
Algebraic
topology
Roughly
speaking,
algebraic
topology
is
a
branch
of
mathematics
which
deals
with
some
"equivalence"
in
algebraic
fashion.
A
typical
process
in
algebraic
topology
is
to
associate
certain
groups
with
a
given
space.
It
studies
homotopy, homology,
cohomology,
exact
sequences,
spectral
sequences,
excision,
obstruction,
characteristic
classses,
duality
etc.
It
has
a
close
relationship
with
differential
topology,
which
differs
from
differential
geometry
by
studying
the
differentiable
structure
of
the
space,
instead
of
being
particularly
interested
in
the
geometric
construct
of
the
space.
In
the
following
pages
we
shall
briefly
describe
some
of
the
concepts
in
algebraic
topology
and
useful
results
for
future
use.
2.3.1.
Homology
theory
If
a
simple
closed
curve,
such
as
an
ellipse
or
a
polygon,
is
drawn
on
the
plane,
then
it
has
an
"inside"
and
"outside".
That
is
to
say
the
closed
curve
forms
the
common
boundary
of
these
two
portions
of
the
plane.
Similarly,
if
a
closed
curve
is
drawn
on
the
surface
of
a
sphere,
the
curve
is
the
boundary
of
two
portions
of
that
surface.
In
contrast
to
this
situation,
by
drawing
the
closed
curve
a
on
the
surface
torus,
a
does
not
necessarily
divide
the
surface
into
two
portions,
or
a
is
not
the
boundary
of
any
portion
of
the
surface
of
the
torus.
The
possibility
of
drawing
a
closed
curve
on
a
surface
or
the
maximum
number
of
closed
curves
along
which
the
surface
may
be
cut
without
dividing
the
surface
into
disjoint
portions
is
clearly
a
topological
property.
A
1-chain
may
be
a
line
segment,
a
curve,
or
a
closed
40
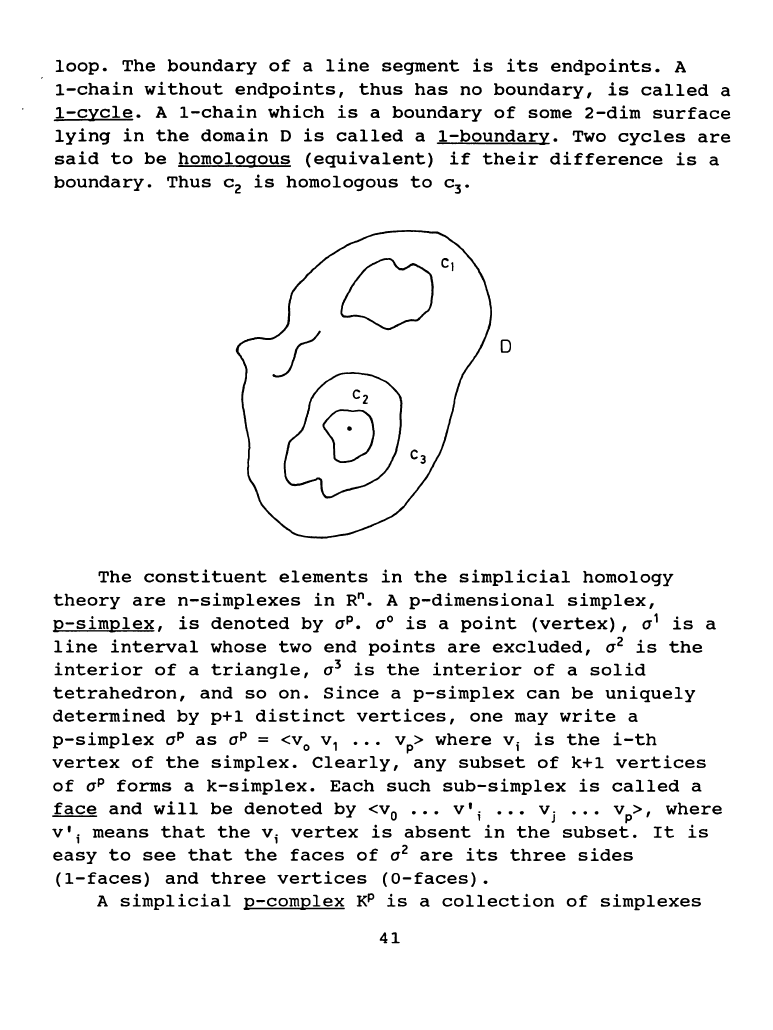
loop.
The
boundary
of
a
line
segment
is
its
endpoints.
A
1-chain
without
endpoints,
thus
has
no
boundary,
is
called
a
1-cycle.
A
1-chain
which
is
a
boundary
of
some
2-dim
surface
lying
in
the
domain
D
is
called
a
1-boundary.
Two
cycles
are
said
to
be
homologous
(equivalent)
if
their
difference
is
a
boundary.
Thus
c
2
is
homologous
to
c
3
•
D
The
constituent
elements
in
the
simplicial
homology
theory
are
n-simplexes
in
R". A
p-dimensional
simplex,
p-simplex,
is
denoted
by
aP.
a
0
is
a
point
(vertex),
a
1
is
a
line
interval
whose
two
end
points
are
excluded,
a
2
is
the
interior
of
a
triangle,
a
3
is
the
interior
of
a
solid
tetrahedron,
and
so
on.
Since
a
p-simplex
can
be
uniquely
determined
by
p+1
distinct
vertices,
one
may
write
a
p-simplex
aP
asaP=
<v
0
v
1
•••
vP>
where
V;
is
the
i-th
vertex
of
the
simplex.
Clearly,
any
subset
of
k+l
vertices
of
aP
forms
a
k-simplex.
Each
such
sub-simplex
is
called
a
face
and
will
be
denoted
by
<v
0
•••
v';
.••
vi
.•.
vP>,
where
v';
means
that
the
V;
vertex
is
absent
in
the
subset.
It
is
easy
to
see
that
the
faces
of
a
2
are
its
three
sides
(1-faces)
and
three
vertices
(0-faces).
A
simplicial
p-complex
KP
is
a
collection
of
simplexes
41
{a
0
i,
a
1
J,
a
2
k,
•••
,
aP
11
}
satisfying
the
following
conditions:
(a)
The
simplexes
of
KP
are
disjoint
and
no
two
have
all
the
same
vertices.
(b)
If
a
simplex
is
in
KP,
all
its
faces
are
also
in
KP.
From
this
definition,
it
is
clear
that
a
simplex
cannot
cross
or
end
in
the
interior
of
another
simplex.
A
chain
cP
on
complex
K
is
a
finite
collection
of
p-simplexes
aiP
written
as
a
formal
sum
with
constant
coefficients
gi:
cp=
:E
giaiP.
The
collection
of
all
p-chains
cP
on
K
forms
an
Abelian
group
denoted
by
CP(K).
Assume a
boundary
is
properly
defined,
(this
involves
the
incidence
number,
we
shall
omit
here,
see
Wallace[l957]),
a
p-
chain
is
a
cycle
zp
if
ozp =
0.
A
p-chain
is
a
boundary
bp
if
there
exists
a
(p+l)-chain
c~
1
such
that
ac~,
= bp.
Tbeorem
2.3.1:
o(ocp)
= 0
for
all
p.
The
collection
of
all
p-cycles
zP
on
K
forms
a
group
ZP(K)
c
CP(K).
The
collection
of
all
p-boundaries
bP
on
K
forms
the
group
BP(K).
Since
oo
=
O,
clearly
BP
c
ZP
A
p-dim.
homology
group
HP(K)
of
a
complex
K
is
defined
to
be
the
factor
group
HP(K)= ZP(K)/Bp(K).
Thus
each
element
of
HP(K)
is
an
equivalence
class
of
p-cycles;
two
cycles
are
said
to
be
homologous
if
they
differ
by
a
boundary.
The
general
form
of
HP(K)
is
Z •
•••
• Z •
GyP·
The
number
of
generators
of
HP(K)
is
called
the
p-th
Betti
number
= Pp·
GrP
is
the
torsion
subgroup
of
HP(K)
-
an
Abelian
group
with
only
finite
elements.
2.3.2.
Homotopy:
What
topological
property
of
a
space
can
be
used
to
distinguish
between,
say
a
closed
disc
and
an
annulus
(a
disc
with
a
hole
in
it)?
The
natural
answer
to
this
question
is
by
considering
the
possibility
of
shrinking
closed
loops
drawn
on
the
two
spaces
to
a
point.
(For
an
arcwise
connected
space,
it
is
independent
of
the
base
point.
We
shall
come
to
this
point
later.)
42
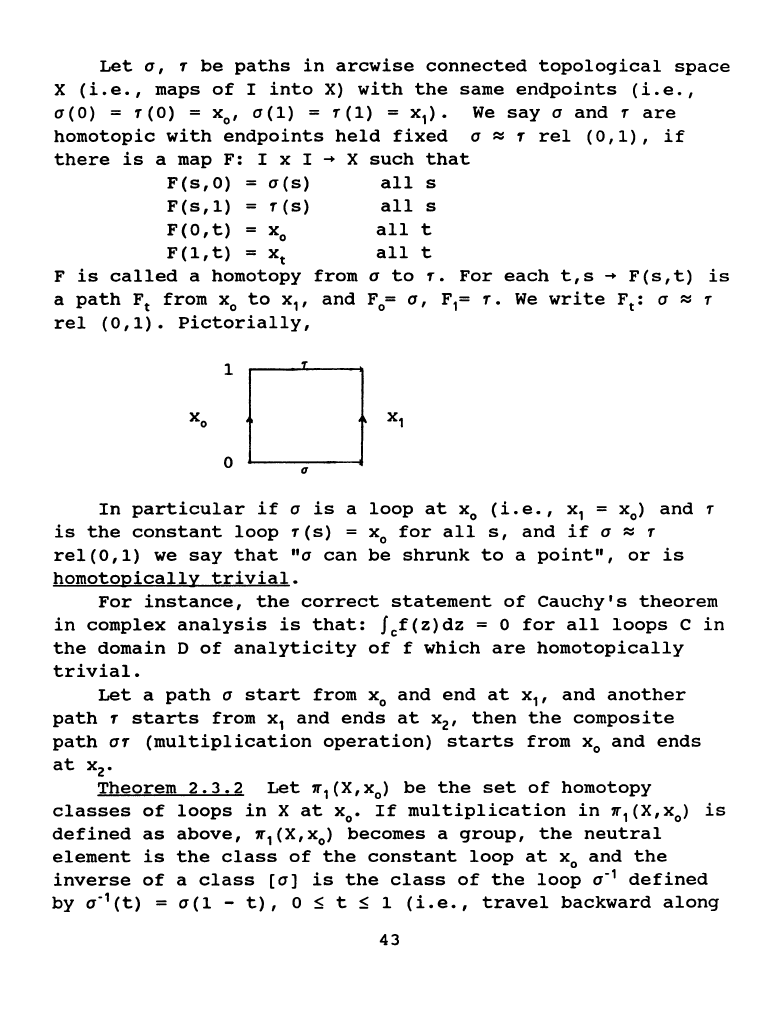
Let
a,
1
be
paths
in
arcwise
connected
topological
space
X
(i.e.,
maps
of
I
into
X)
with
the
same
endpoints
(i.e.,
a(O)
=
1(0)
= x
0
,
a(1)
=
1(1)
= x
1
).
We
say
a
and
1
are
homotopic
with
endpoints
held
fixed
a~
1
rel
(0,1),
if
there
is
a
map
F:
I x I
~
X
such
that
F(s,O)
a(s)
all
s
F(s,1)
1(s)
all
s
F(O,t)
x
0
all
t
F(1,t)
xt
all
t
F
is
called
a
homotopy
from
a
to
1.
For
each
t,s
~
F(s,t)
is
a
path
Ft
from
X
0
to
x
1
,
and
F
0
=
a,
F
1
=
1.
We
write
Ft:
a
~
1
rel
(0,1).
Pictorially,
In
particular
if
a
is
a
loop
at
X
0
(i.e.,
x
1
= X
0
)
and
1
is
the
constant
loop
1(s)
X
0
for
all
s,
and
if
a
~
1
rel(0,1)
we
say
that
"a
can
be
shrunk
to
a
point",
or
is
homotopically
trivial.
For
instance,
the
correct
statement
of
Cauchy's
theorem
in
complex
analysis
is
that:
fcf(z)dz
= 0
for
all
loops
C
in
the
domain
D
of
analyticity
of
f
which
are
homotopically
trivial.
Let
a
path
a
start
from
X
0
and
end
at
x
1
,
and
another
path
1
starts
from
x
1
and
ends
at
x
2
,
then
the
composite
path
a1
(multiplication
operation)
starts
from
X
0
and
ends
at
x
2
•
Theorem
2.3.2
Let
~
1
(X,x
0
)
be
the
set
of
homotopy
classes
of
loops
in
X
at
x
0
•
If
multiplication
in
~
1
(X,x
0
)
is
defined
as
above,
~
1
(X,x
0
)
becomes
a
group,
the
neutral
element
is
the
class
of
the
constant
loop
at
x
0
and
the
inverse
of
a
class
[a]
is
the
class
of
the
loop
a"
1
defined
by
a"
1
(t)
=
a(1-
t),
0 S t S 1
(i.e.,
travel
backward
along
43