Lee K.K. Lectures on Dynamical Systems, Structural Stability and Their Applications
Подождите немного. Документ загружается.

In
the
short
exact
sequence
we
call
a
the
quotient
bundle
of
the
one-to-one
map (monomorphism)
f.
Then
every
monomorphism
has
a
quotient
bundle
and
quotient
bundle
is
unique
up
to
isomorphism.
If
a c p
is
a
subbundle,
then
the
fibers
of
the
quotient
bundle
are
taken
to
be
the
vector
spaces
Pplap
and
the
quotient
bundle
is
denoted
by
p;a.
The
short
exact
sequence
0
-+
a
1
-+
p a
-+
1J.
-+ 0
is
said
to
split
if
there
is
a monomorphism h :
1J.
-+ p
such
that
gh
id~.
Working
through
fibers,
this
is
equivalent
to
the
existence
of
an
onto
map
(epimorphism)
k:
p
-+
a
such
that
kf
=
ida.
Then
the
Whitney
sum
of
bundles
a,
1J.
over
M
can
be
defined
as
the
bundle
a $
1J.
whose
fiber
over
p E M
is
aP
$
/Jp•
If
~'
T
are
charts
for
a,
1J.
respectively
over
u, a
chart
8
for
a $
1J.
over
U
is
8P
=
~P
$ T P : ap $
/Jp
-+
Rm
$ R"
as
we
have
defined
before.
The
natural
exact
sequences
of
vector
spaces
0
-+
a
1
r
-+
a $
1J.
9
r
-+
1J.
-+
0
p p p p
can
fit
together
to
form
a
split
exact
sequence
0
-+
a
1
-+
a $
1J.
9
-+
1J.
-+
o.
Now
let
us
apply
this
short
exact
sequence
to
the
tangent
bundle
of
a
vector
bundle.
Let
a = (B,M,7r)
be
a
c••
1
vector
bundle,
then
each
fiber
aP
is
a
vector
space
with
origin
at
p.
Thus
we
can
identify
aP
with
the
tangent
space
of
aP,
i.e.,
(aP)P.
Hence
a
is
a
subbundle
of
TBIM,
the
tangent
bundle
of
the
bundle
space
B
restricted
to
M,
in
a
natural
way.
Take
note
that
TBIM
is
of
c•.
Since
M c B
is
a
submanifold,
TM
is
a
c•
subbundle
of
TBIM.
Thus
we
have
a
short
exact
sequence
0
-+
a
-+
TBIM
M
-+
TM
-+ 0
which
is
split
by
di:
TM
-+
TBIM.
Thus
we
have
the
following:
Theorem
2.
9.
1
Let
a = ( B,
M,
71")
be
a
cr+l
vector
bundle,
0 S r S
~
•
The
short
exact
sequence
of
c•
vector
bundles
0
-+
a
-+
TBIM
-+
TM
-+
0
is
naturally
split
by
di:TM
-+
TBIM.
Thus
there
is
a
natural
c•
isomorphism
n«
:
TBIM
~
a $
TM.
And
particularly,
a c
TBIM
is
a
natural
subbundle.
Here
we
provide
the
natural
split
of
vector
bundles.
Recall
the
construction
of
orthogonal
complements
104
and
the
normal
bundles,
one
can
see
that
it
is
easy
to
establish
the
existence
of
such
constructions.
In
fact,
we
have
the
following
useful
result
for
a
vector
bundle:
Theorem
2.9.2
Every
short
exact
sequence
of
cr
vector
bundle
splits,
for
0 S r S
~
,
provided
the
base
space
is
paracompact.
[Hirsch
1976].
Whitney
sums
and
restricting
a
bundle
to
a
subset
of
the
base
space
are
methods
to
construct
new
vector
bundles
out
of
old.
A
more
general
construction
is
the
induced
bundle
method.
Let
a
=(B,M,~)
be
a
vector
bundle.
M
0
be
an
arbitrary
topological
space,
f:
M
0
~
M
be
any
map,
then
one
can
construct
the
induced
bundle
(or
pullback)
f*a
over
M
0
•
The
bundle
space
B
0
of
f* a
is
the
subset
B
0
c M
0
xB
consisting
of
all
pairs
(p,b)
with
f(p)
=~(b).
The
projection
map
~o:
B
0
~
M
0
is
defined
by
~
0
(p,b)
=
p.
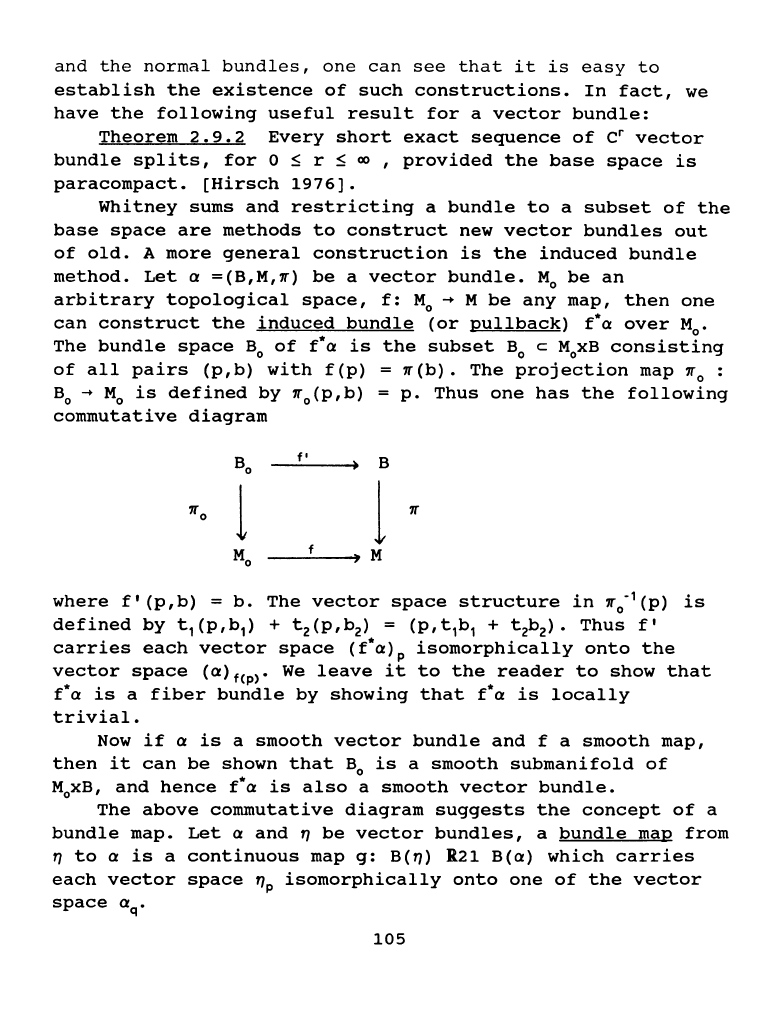
Thus
one
has
the
following
commutative
diagram
f'
B
---'---
M
where
f'
(p,b)
=
b.
The
vector
space
structure
in
~
0
-
1
(p)
is
defined
by
t
1
(p,b
1
)
+ t
2
(p,b
2
)
=
(p,t
1
b
1
+ t
2
b
2
).
Thus
f'
carries
each
vector
space
(f*a)P
isomorphically
onto
the
vector
space
(a)f<p>"
We
leave
it
to
the
reader
to
show
that
f*a
is
a
fiber
bundle
by
showing
that
f*a
is
locally
trivial.
Now
if
a
is
a
smooth
vector
bundle
and
f a
smooth
map,
then
it
can
be
shown
that
B
0
is
a
smooth
submanifold
of
M
0
xB,
and
hence
f*a
is
also
a
smooth
vector
bundle.
The
above
commutative
diagram
suggests
the
concept
of
a
bundle
map.
Let
a
and
~
be
vector
bundles,
a
bundle
map
from
~
to
a
is
a
continuous
map
g:
B(~)
R21
B(a)
which
carries
each
vector
space
~P
isomorphically
onto
one
of
the
vector
space
aq.
105
Lemma
2.9.3
If
g:
B(~)
~
B(a)
is
a
bundle
map,
and
if
g':
M(~)
~
M(a)
is
the
cooresponding
map
of
base
spaces,
then
~
is
isomorphic
to
the
induced
bundle
g•*a.
Before
we
state
the
classifying
theorem
of
vector
bundles,
we
must
first
introduce
the
concept
of
the
universal
bundle
over
a
Grassmann
manifold.
Let
Gnk
be
the
set
of
k-dim
linear
subspaces
of
R"
(k-planes
thro~gh
the
origin).
Since
any
element
of
the
orthogonal
group
O(n)
carries
k-plane
into
a
k-plane,
and
in
fact,
O(n)
is
transitive
on
Gn
k.
If
Rk
is
a
fixed
k-plane
and
Rn-k
is
its
orthogonal
compiement,
then
the
subgroup
of
O(n)
mapping
Rk
onto
itself
splits
up
into
the
direct
product
of
O(k)xO(n-k)
of
two
orthogonal
subgroups
whereby
the
first
leaves
Rn-k
and
the
second
leaves
Rk
pointwise
fixed
respectively.
Thus
we
may
identify
Gn,k
=
O(n)/O(k)xO(n-k).
The
set
Gn,k
with
this
structure
as
an
analytic
manifold
is
called
the
Grassmann
manifold
of
k-planes
in
n-space.
Let
ank
be
a
vector
bundle
over
the
Grassmann
manifold
Gn,k'
and
the
fiber
of
an,k
over
the
k-plane
F c
R"
is
the
set
of
pairs
(F,p)
where
p e
F;
this
makes
sense
because
F
is
a
k-dim
subspace
of
R".
Furthermore,
F
is
trivially
a
subbundle
of
the
vector
bundle
(GnkxR",Gnk'~).
Thus
ank
can
be
made
into
an
analytic
k-dim
ve~tor
bundle
in
a
nat~ral
way.
We
call
ank
the
universal
bundle
over
G
k.
As
we
shall
see,
it
is
als~
called
the
classifying
bundl~
for
n-dim
vector
bundle.
The
following
two
theorems
will
help
us
in
understanding
the
construction
of
classifying
bundles
as
well
as
preparing
us
for
the
classification
theorem.
Theorem
2.9.4
Let
a
be
a
k-dim
cr
vector
bundle
over
a
manifold
M,
where
0 S r S m •
Let
U c M
be
a
neighborhood
of
a
closed
set
A c
M.
Assume
f:
alu
~
UxR"
to
be
a
one-to-one
cr
map
of
vector
bundles
over
idu·
If
n
~
k +
dim
M,
then
there
is
a
one-to-one
cr
map
(Cr
monomorphism) a
~
MxR"
over
i~
which
agrees
with
f
over
some
neighborhood
of
A
in
u.
Theorem
2.9.5
Let
a
be
a
cr
k-plane
bundle
over
a m-
manifold
M,
0 S r S
m.
Then
there
is
a
cr
m-plane
bundle
~
106
over
M
such
that
a s
17
~r
MxR"
(n
> k +
m)
•
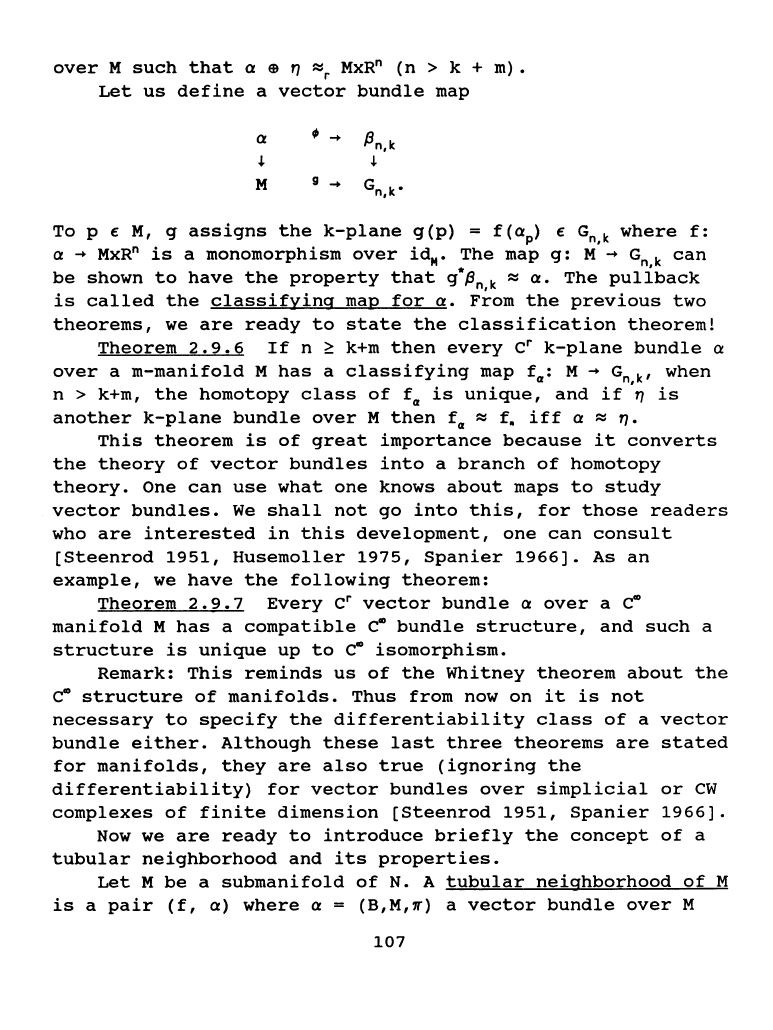
Let
us
define
a
vector
bundle
map
a
.j.
M
g
...
To p £
M,
g
assigns
the
k-plane
g(p)
=
f(aP)
£
Gn,k
where
f:
a
...
MxR"
is
a monomorphism
over
idM.
The
map
g:
M
...
Gnk
can
be
shown
to
have
the
property
that
g*pnk
~a.
The
puliback
is
called
the
classifying
map
for
a.
F~om
the
previous
two
theorems,
we
are
ready
to
state
the
classification
theorem!
Theorem
2.9.6
If
n
~
k+m
then
every
cr
k-plane
bundle
a
over
am-manifold
M
has
a
classifying
map
fa:
M
...
Gnk' when
n
> k+m,
the
homotopy
class
of
fa
is
unique,
and
if
'11
is
another
k-plane
bundle
over
M
then
fa
~
~
iff
a
~
11·
This
theorem
is
of
great
importance
because
it
converts
the
theory
of
vector
bundles
into
a
branch
of
homotopy
theory.
One
can
use
what
one
knows
about
maps
to
study
vector
bundles.
We
shall
not
go
into
this,
for
those
readers
who
are
interested
in
this
development,
one
can
consult
[Steenrod
1951,
Husemoller
1975,
Spanier
1966].
As
an
example,
we
have
the
following
theorem:
Theorem
2 •
9.
7
Every
cr
vector
bundle
a
over
a
c!"
manifold
M
has
a
compatible
c!"
bundle
structure,
and
such
a
structure
is
unique
up
to
c!"
isomorphism.
Remark:
This
reminds
us
of
the
Whitney
theorem
about
the
c!"
structure
of
manifolds.
Thus
from
now
on
it
is
not
necessary
to
specify
the
differentiability
class
of
a
vector
bundle
either.
Although
these
last
three
theorems
are
stated
for
manifolds,
they
are
also
true
(ignoring
the
differentiability)
for
vector
bundles
over
simplicial
or
CW
complexes
of
finite
dimension
[Steenrod
1951,
Spanier
1966].
Now
we
are
ready
to
introduce
briefly
the
concept
of
a
tubular
neighborhood
and
its
properties.
Let
M
be
a
submanifold
of
N. A
tubular
neighborhood
of
M
is
a
pair
(f,
a)
where
a =
(B,M,~)
a
vector
bundle
over
M
107
and
f:
B
~
N
is
an
imbedding
such
that
:
(i)
fiM
=
idM
where
M
is
identified
with
the
zero
section
of
B;
(ii)
f(B)
is
an
open
neighborhood
of
M
in
N.
Loosely
speaking,
we
can
refer
the
open
set
V =
f(B)
as
a
tubular
neighborhood
of
M.
It
is
understood
that
associated
to
V
is
a
particular
retraction
g:
V
~
M
making
(V,M,g)
a
vector
bundle
whose
zero
section
is
the
inclusion
M
~
V.
A
slightly
more
general
concept
is
the
partial
tubular
neighborhood
of
M.
This
is
a
triple
(f,
a,
U)
where
a =
(B,M,~)
is
a
vector
bundle
over
M,
U c B
is
a
neighborhood
of
the
zero
section
and
f:
U
~
N
is
an
imbedding
such
that
tiM=
i~
and
f(U)
is
open
in
N. A
partial
tubular
neighborhood
(f,
a,
U)
contains
a
tubular
neighborhood
in
the
sense
that
there
is
a
tubular
neighborhood
(h,
a)
of
M
in
N
such
that
h = f
in
a
neighborhood
of
M.
Theorem
2.9.8
Let
M c
R"
be
a
submanifold
without
boundary.
Then
M
has
a
tubular
neighborhood
in
R"
[Hirsch
1976,
Golubitsky
&
Guillemin
1973].
Theorem
2.9.9
Let
M c N
be
a
submanifold,
and
aM
=
aN
o.
Then
M
has
a
tubular
neighborhood
inN
[Hirsch
1976].
It
is
useful
to
be
able
to
slide
one
tubular
neighborhood
of
a
manifold
onto
another
one,
and
to
map
fibers
linearly
onto
fibers.
such
sliding
is
a
special
case
of
the
concept
of
isotopy.
Here
we
give
a
more
restrictive
version
of
isotopy.
If
M,
N
are
manifolds,
an
isotopy
of
M
in
N
is
a
homotopy
f:
M x I
~
N
by
f(p,
t)
=
ft(P)
such
that
the
related
map
f'
: M
xI~
N
xI,
where
(p,
t)
R
(ft(p),
t)
is
an
imbedding.
It
is
clear
that
"f
is
isotopic
to
g"
is
transitive.
Theorem
2.9.10
Let
M c N
be
a
submanifold,
and
aM
aN
= o.
Then
any
two
tubular
neighborhoods
of
M
in
N
are
isotopic
[Hirsch
1976].
It
is
clear
that
the
boundary
of
a
manifold
cannot
have
a
tubular
neighborhood,
nonetheless,
it
has
a
kind
of
"half-
tubular"
neighborhood
called
a
collar.
A
collar
on
M
is
an
imbedding
f:
aM
X
[0,~)
~
M
such
that
f(p,O)
=
p.
108
Theorem
2.9.11
aM
has
a
collar.
(Note,
M
can
be
a
c•
manifold)
[Brown
1962,
Hirsch
1976].
When
a
submanifold
M c N
whose
boundary
is
nicely
placed,
N
is
called
a
neat
submanifold.
More
precisely,
we
call
M a
neat
submanifold
of
N
if
aM
= M n
aN
and
M
is
covered
by
charts
(</li'Ui)
of
N
such
that
M n
Ui
=
<Pi_,
(Rm)
where
m =
dim
M.
A
neat
imbedding
is
the
one
whose
image
is
a
neat
submanifold.
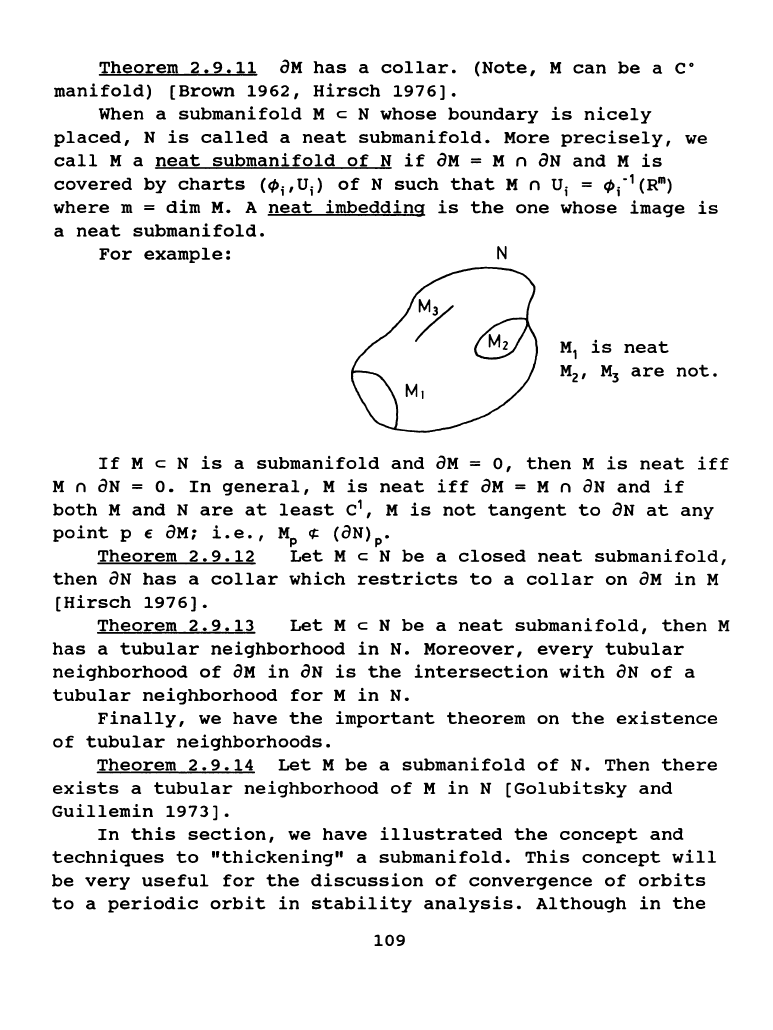
For
example:
N
M
1
is
neat
M
2
,
M
3
are
not.
If
M c N
is
a
submanifold
and
aM
= o,
then
M
is
neat
iff
M n
aN
=
0.
In
general,
M
is
neat
iff
aM
= M n
aN
and
if
both
M
and
N
are
at
least
c
1
,
M
is
not
tangent
to
aN
at
any
point
p E aM;
i.e.
I
Mp
ft.
(aN)p•
Theorem
2.9.12
Let
M c N
be
a
closed
neat
submanifold,
then
aN
has
a
collar
which
restricts
to
a
collar
on
aM
in
M
[Hirsch
1976].
Theorem
2.9.13
Let
M c N
be
a
neat
submanifold,
then
M
has
a
tubular
neighborhood
in
N.
Moreover,
every
tubular
neighborhood
of
aM
in
aN
is
the
intersection
with
aN
of
a
tubular
neighborhood
for
M
in
N.
Finally,
we
have
the
important
theorem
on
the
existence
of
tubular
neighborhoods.
Theorem
2.9.14
Let
M
be
a
submanifold
of
N.
Then
there
exists
a
tubular
neighborhood
of
M
in
N
[Golubitsky
and
Guillemin
1973]
.
In
this
section,
we
have
illustrated
the
concept
and
techniques
to
"thickening"
a
submanifold.
This
concept
will
be
very
useful
for
the
discussion
of
convergence
of
orbits
to
a
periodic
orbit
in
stability
analysis.
Although
in
the
109
discussion
we
may
not
explicitly
invoke
the
notion
of
tubular
neighborhoods,
nonetheless,
the
reader
can
feel
such
"construction".
The
simplest
situation
is
discussing
the
Poincare
return
map.
The
mapping
cylinder
is
the
tubular
neighborhood.
So
far
in
this
chapter,
we
have
discussed
finite
dimensional
manifolds
and
their
topological
and
geometric
properties.
In
the
next
chapter,
we
shall
give
some
brief
discussions
of
infinite
dimensional
manifolds
and
global
analysis
which
will
be
useful
for
our
subsequent
discussions
of
dynamical
systems
and
structural
stabilities.
110
Chapter
3
Introduction
to
Global
Analysis
and
Infinite
Dimensional
Manifolds
3.1
What
is
global
analysis?
First
recall
that
linear
analysis
is
the
study
of
topological
vector
spaces,
such
as
real,
complex
or
vector
valued
functions
on
R"
or
on
some
domain
in
R",
and
linear
maps
usually
are
differential
(or
integra-differential)
operators.
This
may
be
viewed
as
"local"
linear
analysis.
To
generalize
to
"global"
linear
analysis,
an
arbitrary
differentiable
manifold
M
replaces
the
domain
in
R",
and
topological
vector
spaces
of
cross-sections
of
differentiable
vector
bundles
over
M
are
considered.
Again,
the
linear
maps
are
defined
by
linear
differential
or
integra-
differential
operators.
Roughly
speaking,
the
questions
here
are
relating
analytic
invariants
of
the
operators
with
topological
invariants
of
M
and
the
given
vector
bundles,
and
it
is
the
proper
setting,
for
example,
for
Hodge's
theory
of
harmonic
forms,
the
Atiyah-Singer
index
theorem,
and
the
Atiyah-Bott
fixed
point
formula.
What
about
"global
non-linear
analysis"?
Instead
of
differentiable
vector
bundles
over
a
differentiable
manifold
M,
we
consider
more
general
differentiable
fiber
bundles
over
M;
instead
of
topological
vector
spaces
of
sections
of
the
vector
bundle,
we
consider
differentiable
manifolds
of
sections
of
the
general
fiber
bundle,
and
we
take
non-linear
differential
operators
which
define
differential
maps
between
such
manifolds
of
sections.
This
seems
to
be
the
proper
arena
for
a
variety
of
subjects,
such
as
the
theory
of
non-linear
differential
operators
and
the
calculus
of
variations
(in
particular,
Morse
theory
and
Lucternik-Schnirelman
theory),
and
the
general
transversality
theorem,
just
to
name
a
few.
For
an
earlier
review,
see
[Eells
1966;
Kahn
1980;
Palais
1968;
Berger
1977].
The
underlying
technique
which
runs
through
all
the
111
nonlinear
analyses
is
the
idea
of
"linearization",
i.e.,
approximating
a
nonlinear
map
"locally"
by
a
linear
map.
Usually
the
sets
where
the
map
is
defined
and
into
which
it
maps
have
natural
infinite
dimensional
manifold
structures,
and
the
map
is
differentiable
with
respect
to
such
manifold
structures.
Moreover,
the
linearization
of
the
maps
near
a
given
point
is
just
its
differential
at
that
point.
Thus
abstract
nonlinear
analysis
turns
out
to
be
the
study
of
infinite
dimensional
manifolds
and
differentiable
maps
on
them.
An
analogous
situation
in
differential
geometry
is
that
for
a
given
differentail
manifold,
an
open
chart
can
be
found
such
that
in
a
neighborhood
of
a
point,
all
the
local
properties
of
the
manifold
can
be
represented
in
a
Cartesian
coordinate
system.
For
arbitrarily
small
neighborhoods,
the
manifold
can
be
considered
"Euclidean".
Everything
is
"trivialized",
which
corresponds
to
"linearalization".
Yet
the
different
pieces
at
different
points
have
different
geometrical
and
local
properties.
The
means
to
piece
together
is
through
the
overlapping
region
U«nup.
Here,
the
two
pieces
have
to
agree
on
all
the
local
properties
in
the
overlapping
region.
This
reminds
us
that
in
calculus,
the
definition
of
continuity
of
a
function
at
a
point
is
that,
not
only
limits
on
either
side
of
the
point
exist,
but
they
have
to
agree.
The
matching
of
the
overlapping
region
over
the
entire
manifold
is
the
spirit
of
"linearization"
without
distroying
the
properties
(or
more
plainly,
losing
some
information)
of
the
manifold.
3.2
Jet
bundles
In
the
following,
we
shall
define
jet
bundles
and
display
their
utility.
But
before
we
start
the
proper
mathematical
definition,
it
is
helpful
to
remind
ourselves
an
analogy
in
calculus.
If
f(x)
and
g(x)
are
ca
and
analytic,
one
can
easily
show
that
f(x)
=
g(x)
up
to
k-th
order
iff
the
Taylor
series
of
f
and
g
are
identical
up
to
112
the
k-th
order
at
every
point
of
x.
The
slightly
more
generalized
case
is
the
power
series
of
a
complex
variable.
Indeed,
one
could
generalize
to
a
function
of
multivariables.
In
the
following,
we
go
one
step
further,
we
generalize
the
idea
of
Taylor
series
to
the
setting
of
maps
over
manifolds.
Let
M
and
N
be
CG
manifolds,
and
let
f,g
: M
~
N
be
CG
maps,
f
is
said
to
agree
with
g
up
to
order
k
at
p e M
if
there
are
coordinate
charts
at
p e M
and
f(p)
=
g(p)
e N
such
that
they
have
the
same
Taylor
expansion
up
to
and
including
order
k.
One
can
convince
oneself
that
the
agreement
of
f
and
g
up
to
order
k
(denoted
by
f -
g)
is
coordinate
independent.
In
fact,
-k
is
an
equivalence
relation,
and
the
equivalence
class
of
maps
which
agree
with
f
to
order
k
at
p
is
called
the
k-jet
of
f
at
p
and
denoted
by
ipkf.
Let
X
8
be
local
coordinates
around
p e M
and
yP.
be
local
coordinates
around
f(p)
e
N,
then
jpkf
is
specified
by
X
8
,
yP.
= fiL(p),
Y/
=
aafiL(p),
YP.ab
= aabfiL(p)' · ·
·,
YP.a,
...
a-=
aa,
...
a
fP.(p),
where
fiL(p)
is
the
coordinate
presentation
off,
and
k
aa,
•.•
, aa,
...
a.
denote
partial
derivatives
aa =
a;axa,
•••
, aa a =
ak;ax
81
•••
axa•
,
I'"
II
and
Latin
indices
a,b,
.••
a
1
,
••
,ak
range
from
1
to
dim
M
and
Greek
indices~.
a,
.•.
range
from
1,
••
,dim
N.
conversely,
any
collection
of
numbers
X
8
,
yP.,
Y/,
••
, yll
8 8
,
where
X
8
and
•.•.
ll
yll
are
the
corresponding
coordinate
charts
and
yP.ab'
..
yP.
are
symmetric
in
their
lower
indices,
determining
a
unlq~~~
equivalence
class.
Putting
this
formally,
one
has
the
following:
Let
M
and
N
be
smooth
manifolds,
p e
M.
Suppose
f,g:
M
~
N
are
smooth
maps
with
f(p)
=
g(p)
=
q.
(i)
f
has
first
order
contact
(i.e.,
agrees
to
first
order)
with
gat
p
if
(df)P
=
(dg)P
as
mapping
of
MP
~
Nq.
(ii)
By
induction,
f
has
k-th
(k
is
a
positive
integer)
order
contact
with
g
at
p
if
(df):TM
~TN
has
(k-1)-th
order
contact
with
(dg)
at
every
point
in
MP.
This
is
written
as
f
-k
g
at
p.
(iii)
Let
Jk(M,N)p,q
denote
the
set
of
equivalence
classes
under
"-k
at
p"
of
mappings
f:
M
~
N
where
f(p)
=
q.
(iv)
Let
Jk(M,N),
113