Лазарев Ю.Ф. Mатематическое моделирование физических процессов и технических систем в MATLAB
Подождите немного. Документ загружается.

441
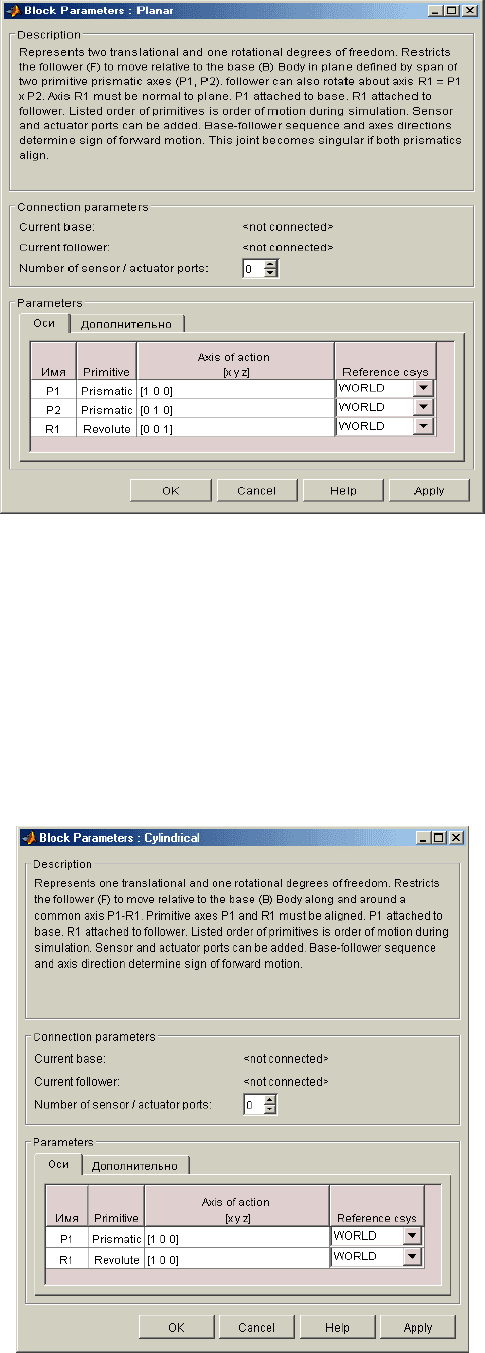
Рис. 11.15. Окно настраивания блока Planar
С помощью блока Planar (Плоское движение) можно обеспечить такое сочленение двух тел, когда одна из плос-
костей ведущего и ведомого тела сохраняется неизменной, а точки ведомого тела могут занимать любое поло-
жение в соответствующей плоскости ведущего тела. Блок представляет собой последовательное соединение
трех элементарных сочленений – двух призматических P1
и P2 и одного цилиндрического шарнира R1. Для
обеспечения плоского движения необходимо, чтобы три указанные в блоке настраивания (рис. 15) оси были
некомпланарными.
Блок Cylindrical (Цилиндрическое сочленение) представляет возможность имитировать такое соединение двух
тел, которое допускает одновременную свободу вращения вокруг указанной оси и поступательного перемеще-
ния вдоль этой же оси (рис. 16). Он представляет собой последовательное
соединение сочленения P1 типа Pris-
matic и сочленения R1 типа Revolute.
Рис. 11.16. Окно настраивания блока Cylindrical
442
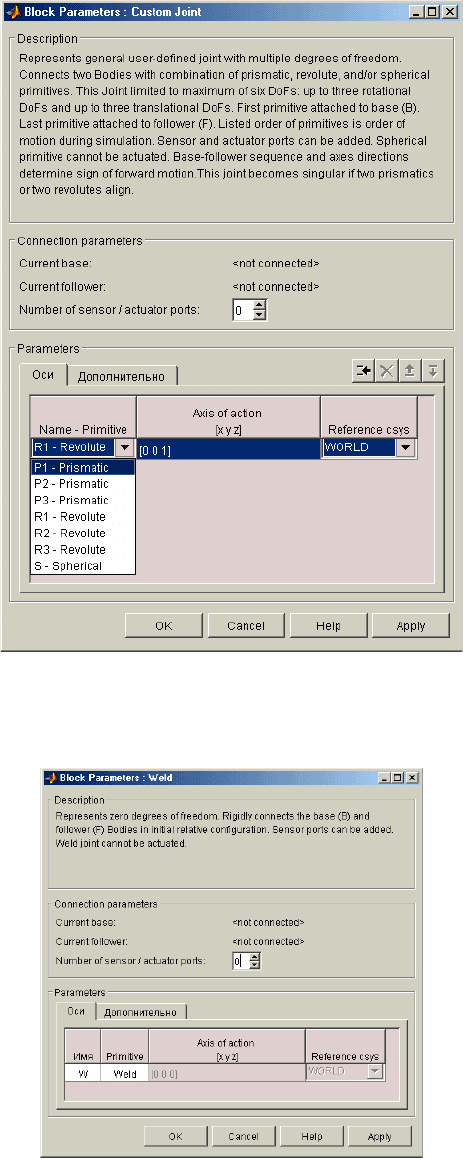
Особое место занимает блок Custom Joint (Наборное сочленение). Он предоставляет возможность пользователю
самому сконструировать произвольную последовательную цепь из элементарных сочленений. Для этого ему
предоставляется (в виде списка в первой колонке вкладки Оси, рис. 17) набор из трех примитивов P1, P2, P3
типа Prismatic, трех сочленений R1, R2, R3 типа Revolute и одного примитива S типа Spherical. Ограничения
состоят в следующем. Набор должен обеспечивать не
более 6 степеней свободы – три угловые и три поступа-
тельные. Никакие две оси примитивов Prismatic или две оси примитивов Revolute не должны быть параллель-
ными ( в этом случае сочленение вырождается).
Рис. 11.17. Окно настраивания блока Custom Joint
Блок Weld (Жесткое соединение) служит для имитации жесткого соединения двух тел (рис. 18). Удобен для
построения моделей поводковых механизмов.
Рис. 11.18. Окно настраивания блока Weld
443
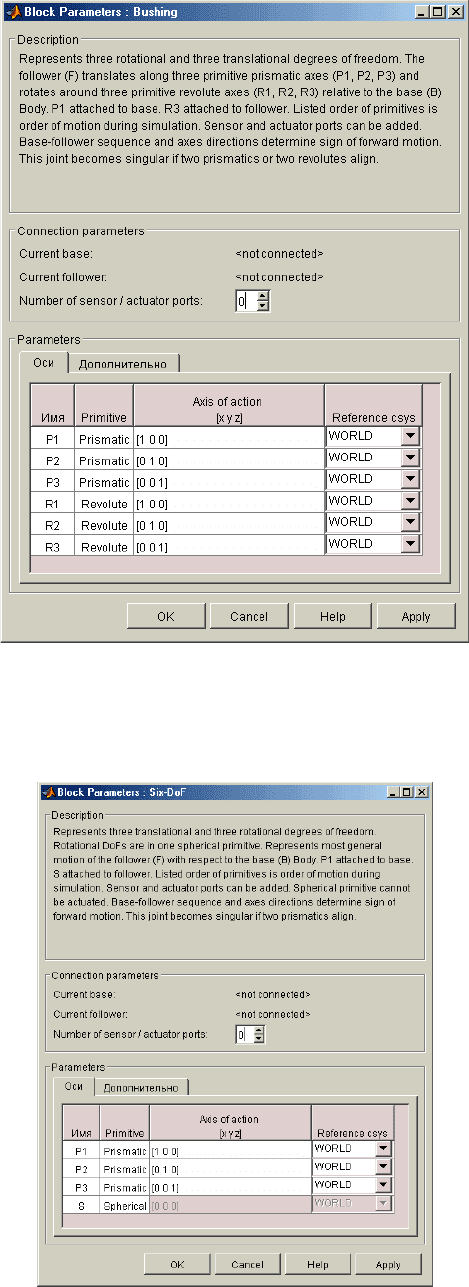
Блок Bushing (рис. 19) обеспечивает шесть степеней свободы (три поступательные и три угловые) и состоит из
последовательно соединенных трех примитивов P1, P2, P3 типа Prismatic, трех сочленений R1, R2, R3 типа
Revolute.
Рис. 11.19. Окно настраивания блока Bushing
Похожую функцию выполняет блок Six-DoF (Шесть степеней свободы). Как видно из рисунка 20, единствен-
ным отличием от блока Bushing является то, что для обеспечения трех угловых степеней свободы используется
один примитив S типа Spherical вместо трех типа Revolute.
Рис. 11.20. Окно настраивания блока Six-DoF
444
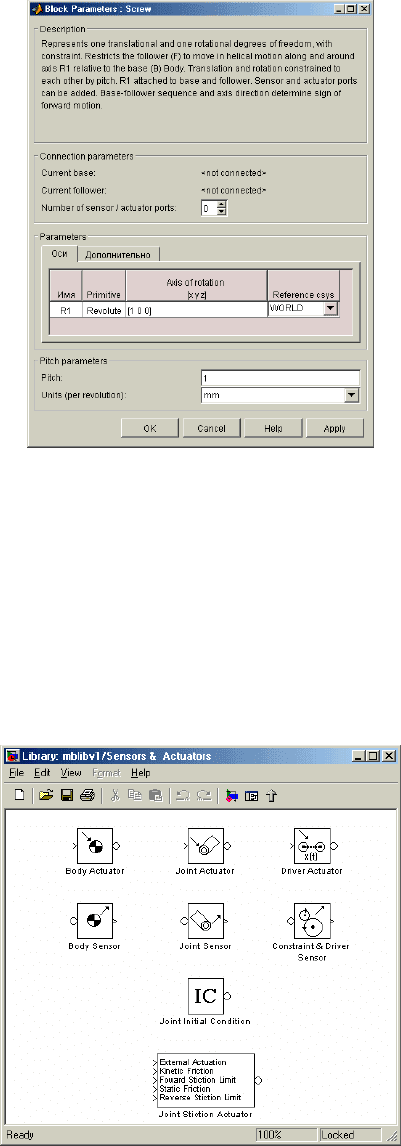
Рис. 11.21. Окно настраивания блока Screw
Особенностью блока Screw (Винт), обеспечивающего винтовую степень свободы относительного перемещения
двух тел, является (рис. 21) наличие дополнительного устанавливаемого параметра Pitch (Шаг винта).
Раздел Sensors&Actuators
В этом разделе размещены блоки, позволяющие задать относительные движения тел (блоки Actuator) или изме-
рить характеристики относительного их движения (блоки Sensor). Как ранее было отмечено, блоки типа Joint
(Сочленения) могут быть снабжены дополнительными портами для подсоединения к ним блоков Actuator и
Sensor. Аналогичная операция возможна и по отношению к блокам Body, Driver и Constraint. Содержимое раз-
дела показано
на рис. 22.
Рис. 11.22. Содержимое раздела Sensors & Actuators
Особенностью рассматриваемых блоков является то, что они являются связующими с обычными S- блоками
библиотеки
SIMULINK
, что позволяет использовать возможности этой библиотеки для формирования сигна-
лов, их преобразования и перевода получаемых результатов в рабочее пространство Simulink.
Как видно из рисунка 22, блоки возбудителей (Actuator) и измерителей (Sensor) относительного движения раз-
деляются на три группы:
Body Actuator и
Body Sensor
Возбудитель и измеритель движения тела. Предназначены для подсоединения к
блокам Body и задают или измеряют абсолютное движение той системы коорди-
нат, жестко связанной с телом, к которой они подсоединены
Joint Actuator и
Joint Sensor
Возбудитель и измеритель движения сочленения. Предназначены для подсоеди-
нения к блокам Joint и задают или измеряют относительное движение того при-
445
митива, который указан в окне настраивания
Driver Actuator и
Driver&Constraint
Sensor
Возбудитель двигателя и измеритель движения двигателя или связи. Предназна-
чены для подсоединения к блокам Driver или Constraint и задают или измеряют
относительное движение двигателя или связи, с которыми они соединены
Начнем с рассмотрения блоков второй группы. На рис. 23 и 24 приведены окна настраивания блоков Joint Ac-
tuator и Joint Sensor.
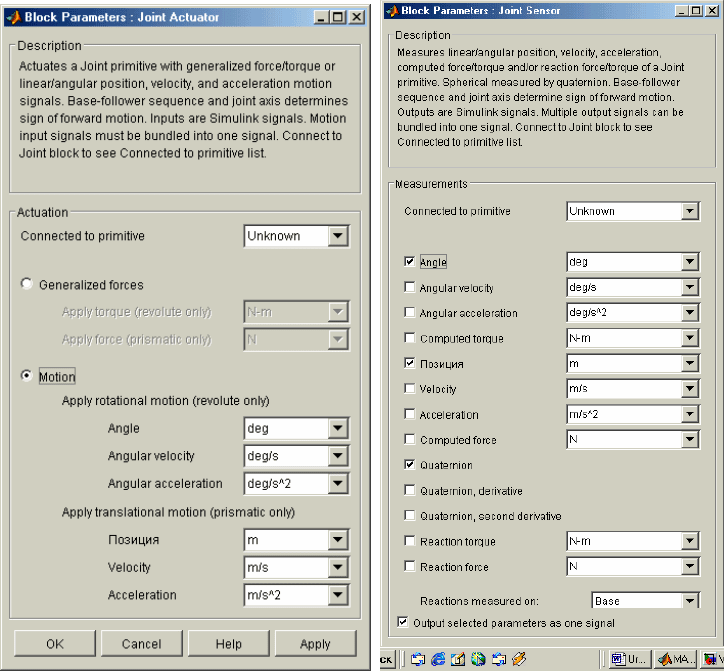
Рис. 11.23. Окно настраивания блока Joint Actuator
Рис. 11.24. Окно настраивания блока Joint Sensor
Из их рассмотрения явствует следующее.
1. С помощью блока Joint Actuator можно в общем случае задать как функцию времени либо силовое взаимо-
действие между элементами примитива, имя которого указывается в верхнем окошке ввода, либо относитель-
ное движение элементов этого примитива. Установление вида возбуждения осуществляется активизацией
соот-
ветствующего раздела Generalized Forces (Обобщенные силы) или Motion (Движение) в окне настраивания бло-
ка кнопкой слева от соответствующего названия раздела.
2. Задание относительного движения частей примитива осуществляется в виде задания векторного сигнала из
трех элементов – первый из них определяет относительное перемещение, второй – относительную скорость, а
третий – относительное ускорение частей указанного элементарного сочленения.
3.
Блок Joint Sensor позволяет в общем случае измерить следующие характеристики относительного движения
частей примитива, имя которого устанавливается в верхнем окошке ввода окна настраивания блока:
Angle
(Угол) угол поворота выходной части примитива (Follower) относительно его
части, соединенной с входом (Base)
Angular velocity
(Угловая скорость) – относительная угловая скорость
Angular acceleration
Computed torque
(Угловое ускорение) – относительное угловое ускорение
(Вычисленный момент) – полный момент сил, вызывающий угловое относи-
тельное ускоренное движение
Позиция
перемещение выходной части примитива (Follower) относительно его части,
соединенной с входом (Base)
Velocity
(Скорость) – относительная скорость
446
Acceleration
(Ускорение) – относительное ускорение
Computed force
(Вычисленная сила) - полная сила, вызывающая относительное ускоренное
движение
Quaternion
(Кватернион) – вектор из четырех элементов, характеризующий текущее от-
носительное угловое положение частей примитива
Quaternion, derivative
(Производная от кватерниона по времени) – вектор из четырех элементов,
являющихся производными по времени от соответствующих элементов ква-
терниона относительного поворота
Quaternion, second
derivative
(Вторая производная от кватерниона по времени) – вектор из четырех элемен-
тов, являющихся вторыми производными по времени от соответствующих
элементов кватерниона относительного поворота
Reaction torque
(Момент реакции) – момент реакции относительно оси примитива
Reaction force
(Сила реакции) - сила реакции по оси примитива
Примечания. 1. Выбор необходимых для измерения величин производится установлением флажка
рядом с названием соответствующей величины.
2. Выходом блока является вектор, элементами которого являются отмеченные ве-
личины в том порядке, как они указаны в списке в окне настраивания.
3. При подключении к конкретным элементарным сочленениям ряд
окон ввода в ок-
не настраивания становятся неактивными, поэтому выбор ограничивается оставши-
мися величинами.
4. Примитив типа Spherical позволяет измерить только кватернион поворота и его
производные.
Перейдем к рассмотрению блоков возбуждения и измерителей для тел. Их окна настраивания приведены на
рис. 25 и 26.
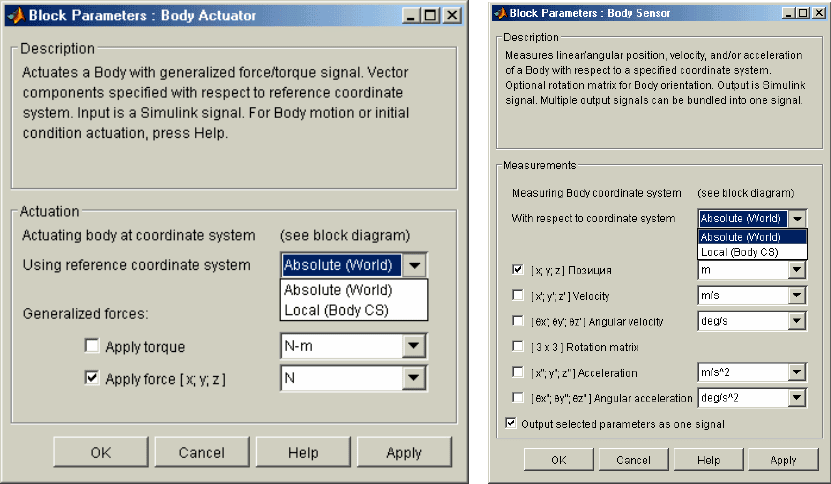
Рис. 11.25. Окно настраивания блока Body Actuator
Рис. 11.26. Окно настраивания блока Body Sensor
Как видим, параметры возбуждения могут быть определены как в абсолютной (инерциальной), так и по отно-
шению к системе координат, связанной с телом в той точке, куда подсоединен блок. При этом возбуждаться
могут только силы и моменты, приложенные к точке подсоединения. Измерены же
могут быть такие величины:
[x,y,z] Позиция
Вектор абсолютного перемещения соответствующей точки тела
[x',y',z'] Velocity
(Скорость) – вектор проекций абсолютной скорости соответствующей точки
тела
[θx',θy',θz'] Angular
velocity
(Угловая скорость) – вектор проекций абсолютной угловой скорости тела
[3×3] Rotation matrix
Матрица направляющих косинусов углового положения тела
[x",y",z"]
Acceleration
(Ускорение) – вектор проекций абсолютного ускорения соответствующей
точки тела
[θx",θy",θz"] Angular
(Угловое ускорение) – вектор проекций абсолютного углового ускорения тела
447
acceleration
Как и ранее, величины, которые необходимо измерить, должны быть отмечены флажками слева, а выходом
блока является вектор всех отмеченных измеряемых величин в порядке, указанном в окне настраивания.
На рисунках 27 и 28 показаны окна настраивания блоков возбуждения и измерения связей.
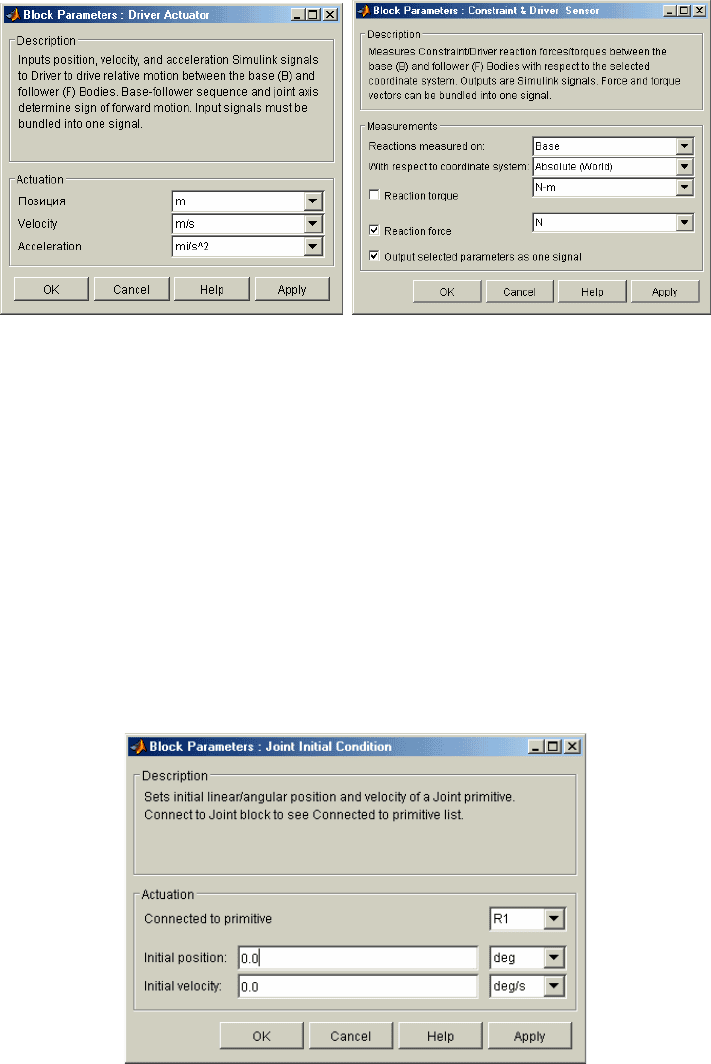
Рис. 11.27. Окно настраивания блока Driver Actuator
Рис. 11.28. Окно настраивания блока Constraint & Driver Sensor
Из них следует:
1) возбуждаться могут только блоки нестационарных связей (Driver), а измерители (Sensor) могут быть подсое-
динены к любым блокам связей;
2) величины, которые задаются как возбуждение, представляют собой векторы из трех элементов (перемеще-
ние, скорость и ускорение); при этом перемещения могут быть линейными (
как показано на рис. 27) или угло-
выми (если имитируется нестационарная связь по углу);
3) измерители (Sensor) могут измерять только силу и момент силы реакции в связи.
Помимо указанных блоков в раздел входят два особых блока. Один из них – блок Joint Initial Condition (На-
чальные Условия сочленения) - позволяет задать начальное относительное положение и начальную относи-
тельную
скорость (рис. 29) двух частей того элементарного сочленения (Revolute или Prismatic), к которому он
подсоединен.
Рис. 11.29. Окно настраивания блока Joint Initial Condition
Следующий блок - Joint Stiction Actuator (Имитатор "захвата" сочленения) – позволяет моделировать силы и
моменты сил вязкого и сухого трения в оси элементарного сочленения, включая явление "жесткого" сцепления
его частей силами сухого трения. Окно настраивания этого блока приведено на рис. 30.
448
Рис. 11.30. Окно настраивания блока Joint Stiction Actuator
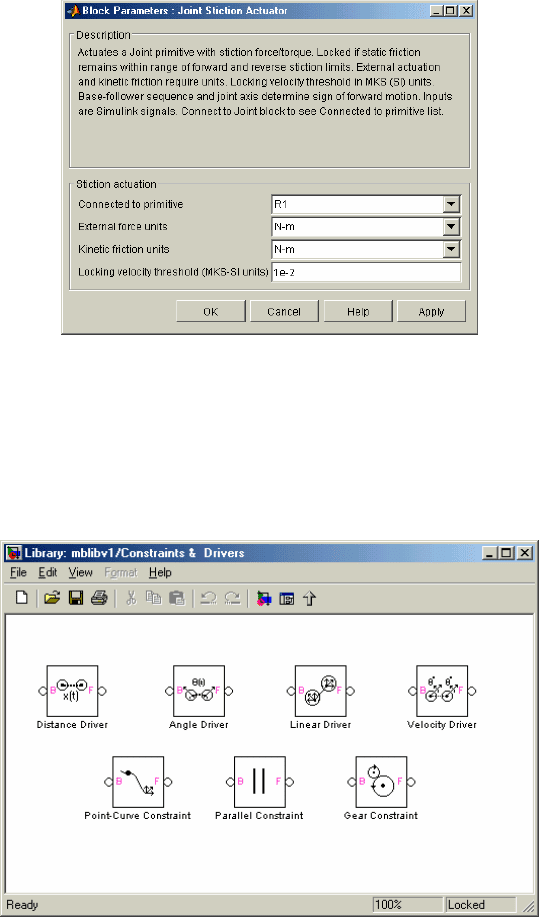
Раздел Constraints & Drivers
Этот раздел содержит блоки, имитирующие наложенные между телами связи – стационарные (блоки Constraint)
или нестационарные (блоки Driver). Содержимое раздела приведено на рис. 29.
Рис. 11.31. Содержимое раздела Constraints & Drivers
Дадим краткую характеристику блоков.
Distance Driver
Задает нестационарную связь между подсоединенными к блоку телами в виде зависи-
мости от времени расстояния между началами систем координат, связанными с этим
телами
Angle Driver
Задает нестационарную связь между подсоединенными к блоку телами в виде зависи-
мости от времени угла между указанными двумя осями систем координат, связанными
с этим телами
Linear Driver
Задает нестационарную связь между подсоединенными к блоку телами в виде зависи-
мости от времени проекции расстояния между началами систем координат, связанны-
ми с этим телами, на указанную ось инерциальной системы отсчета
Velocity Driver
Задает нестационарную связь между подсоединенными к блоку телами в виде зависи-
мости от времени линейной комбинации проекций векторов линейных и угловых ско-
ростей систем координат, связанными с этим телами, на указанные оси
Point Curve
Constraint
Задает стационарную связь между подсоединенными к блоку телами в виде заданных
своими координатами в системе координат, связанной с ведомым (Follower) телом,
точек кривой расстояния начала системы координат, связанной с ведущим (Body) те-
лом; кривая определяется сплайновой интерполяцией указанных точек
Parallel
Constraint
Задает стационарную такую связь между подсоединенными к блоку телами, что ука-
занная ось системы координат, связанной с ведущим телом, остается во все время дви-
жения параллельной одноименной оси системы координат, связанной с ведомым телом
449
Gear Constraint
Задает стационарную связь между подсоединенными к блоку телами как зубчатую
передачу с задаваемыми радиусами делительных окружностей
Примечания. 1. Задание временной зависимости нестационарной связи в блоке Driver осуществля-
ется через подсоединение к последнему блока Driver Actuator.
2. Если к блоку Driver не подсоединен блок Driver Actuator, он реализуют соответст-
вующую стационарную связь. Например, Distance Driver реализует движение начала
координат тела Follower по
сфере с центром в начале координат тела Body. При этом
радиус сферы определяется заданным начальным положением этих систем коорди-
нат.
Раздел Utilities
Содержимое раздела показано на рис. 32.
Рис. 11.32. Содержимое раздела Utilities
Блок Connection Port (Соединительный порт) играет в модели SimMechanics ту же роль, какую играют блоки In
и Out в обычной S-модели. Благодаря ему, в модели SimMechanics можно создавать подсистемы, формируя
входы и выходы этими блоками. Окно настраивания приведено на рис. 33. Параметр настраивания один – место
расположение внешнего изображения порта справа или слева на изображении
подсистемы.
Рис. 11.33. Окно настраивания блока Connection Port
При использовании блоков Joint Sensor для измерения угла относительного поворота следует иметь в виду, что
измеритель угла выдает сигнал, пропорциональный измеряемому углу только в диапазоне
радиан. При
превышении этого диапазона выдаваемое значение угла претерпевает разрыв, равный
радиан. Чтобы полу-
чить реальное значение угла поворота в этом случае следует использовать блок Continuous Angle. При этом в
число измеряемых блоком Joint Sensor величин, помимо угла, следует включить и скорость изменения этого
угла и подать соответствующий сигнал на вход Rate. Тогда на выходе блока получится непрерывный сигнал
угла. Параметрами настраивания блока Continuous Angle (рис. 34) являются единицы
измерения угла и угловой
скорости.
π
±
π
2
450
Рис. 11.34. Окно настраивания блока Continuous Angle
11.2. Модель уравновешенного свободного гироскопа
Рассмотрим процесс построения S-модели с помощью библиотеки
SimMechanics
на простейших примерах.
Начнем с модели уравновешенного гироскопа. Под уравновешенным гироскопом понимают устройство, со-
стоящее из одного твердого тела, центр тяжести которого неподвижен в инерциальном пространстве, а само
тело может произвольно поворачиваться в пространстве относительно этой неподвижной его точки (точки под-
веса), при этом телу сообщено быстрое вращение вокруг одной
из осей, жестко связанных с телом (оси собст-
венного вращения гироскопа).
Обеспечить три угловые степени свободы телу можно с помощью двух видов сочленений, предусмотренных
библиотекой
SimMechanics
(раздел Joints), – Spherical (Сферический шарнир) и Gimbal (карданов подвес).
Удобнее использовать блок Gimbal. Этот вид сочленения представляет собой соединение трех элементарных
сочленений вида Revolute (Цилиндрический шарнир), каждый из которых обеспечивает вращение вокруг одной
из трех взаимно-перпендикулярных осей.
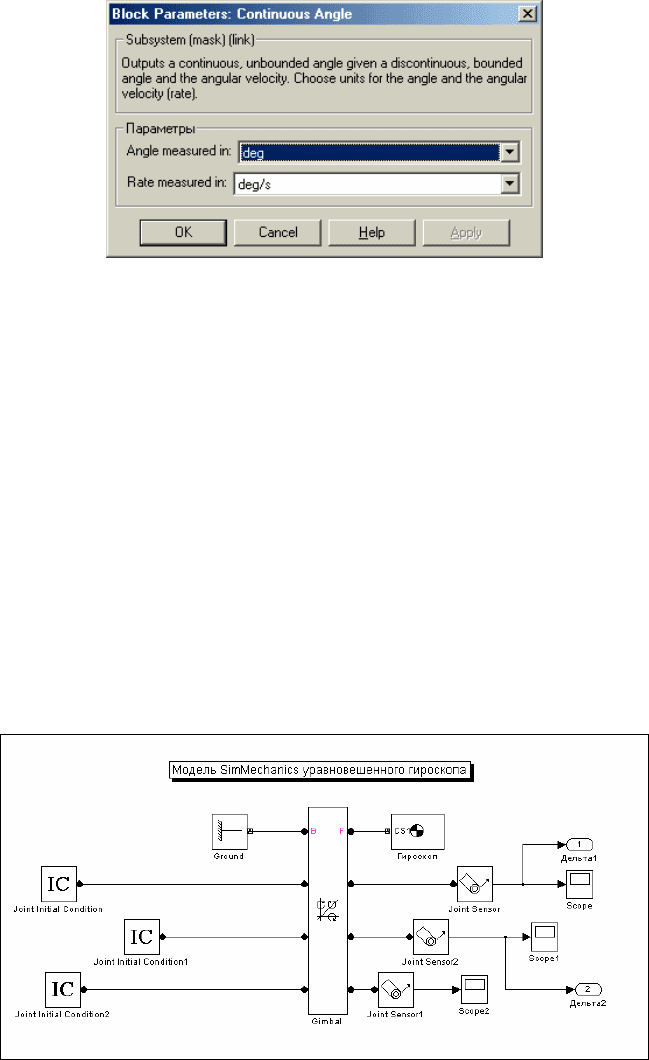
Модель такого гироскопа представлена на рис. 35.
Рис. 11.35. Модель SimMechanics уравновешенного гироскопа
Она состоит из блока Ground инерциальной системы отсчета, блока Gimbal обеспечения трехстепенного подве-
са гироскопа, блока Гироскоп (типа Body), трех блоков Joint Initial Condition (IC), каждый из которых устанав-
ливает начальные условия для одного из примитивов R1, R2 и R3 типа Revolute, составляющих подвес Gimbal,
и трех измерителей Joint Sensor, каждый из которых подсоединен к одному из указанных примитивов и
измеря-
ет угол его относительного поворота.
Для связи с рабочим пространством предусмотрены выходные порты Дельта1 и Дельта2, на которые поступают
сигналы, пропорциональные текущим значениям углов поворота гироскопа вокруг осей
и соответствен-
но.
Z X
Обозначим:
m
масса гироскопа
J
матрица моментов инерции гироскопа
OM
собственная угловая скорость гироскопа (вокруг оси )
Y
omx, omz
начальные угловые скорости гироскопа вокруг осей и соот-
X Z