Лазарев Ю.Ф. Mатематическое моделирование физических процессов и технических систем в MATLAB
Подождите немного. Документ загружается.


431
Урок 11. Моделирование машин и механизмов (библиотека
SimMechanics)
Общая характеристика библиотеки SimMechanics
Модель уравновешенного свободного гироскопа
Модель кривошипно-шатунного механизма
Модель движения маятника
432
Библиотека
SimMechanics
пакета
Simulink
содержит программные средства (в виде блоков) для моделиро-
вания механического движения механизмов и машин.
Как и в ранее рассмотренной библиотеке
SimPowerSystems
, идеология составления блок-схем в ней суще-
ственно отличается от идеологии функциональных блок-схем библиотеки
SIMULINK
, т. е. S-моделей. В блок-
схеме
SimMechanics
отдельные блоки фактически следует рассматривать как модели, имитирующие механи-
ческое движение одной части моделируемого механизма относительно другой его части. "Входы" и "выходы"
блока фактически таковыми не являются, а представляют собой имитацию "посадочного" места соответствую-
щей части механизма. Линии соединения "входов" и "выходов" блоков имитируют жесткие соединения одной
("выходной") части одного
механизма с "входной" частью другого механизма. Можно утверждать, что это со-
единение моделирует передачу силового воздействия между частями разных механизмов. Но, так как, в соот-
ветствии с третьим законом Ньютона, сила действия равна силе противодействия, такую передачу силы нельзя
рассматривать как однонаправленное воздействие. Поэтому в блок-схемах
SimMechanics
на линиях соедине-
ний механических блоков вы не встретите изображений стрелок, указывающих на направление воздействия. По
той же причине графические изображения "входов" и "выходов" механических блоков имеют вид не направ-
ленных стрелок, а квадратов с диагоналями.
Как и в блоках библиотеки
SimPowerSystems
, "входы" и "выходы" механических блоков нельзя рассматри-
вать как источники и приемники каких бы то ни было сигналов. К линиям их соединений нельзя подсоединить
обычные S-блоки, а потому нельзя и сформировать с помощью последних заданные воздействия или вывести
информацию о получаемых в результате движениях механизмов (например, в обзорные окна или
в систему
MatLab). Но, так как любое моделирование механизмов невозможно осуществить без задания нужных иссле-
дователю воздействий и без вывода результатов моделирования в среду MatLab, такая идеология построения
блок-схем механизмов требует включения в библиотеку блоков, осуществляющих прямую и обратную связь от
S-блоков к механическим блокам и обратно. Такие блоки по необходимости
должны иметь хотя бы один m-
вход и один механический "выход" (для "восприятия" заданного воздействия и перевода его в механическое),
либо механический "вход" и m-выход (для отображения результатов моделируемого механического движения в
виде информационного сигнала).
11.1. Общая характеристика библиотеки SimMechanics
Если с помощью контекстного меню открыть библиотеку
SimMechanics
из браузера
Simulink
, то на экране
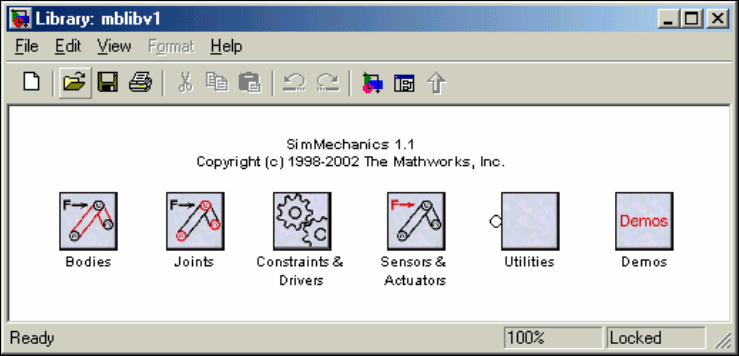
появится окно, показанное на рис. 1.
Рис. 11.1. Окно библиотеки SimMechanics
Как видим, библиотека содержит 6 разделов:
Bodies
(Тела) содержит блоки, моделирующие уравнения движения твердых тел
Joints
(Сочленения) включает блоки имитации механических сочленений, обеспечиваю-
щих требуемые степени свободы одной части механизма относительно другой
Constraints &
Drivers
(Связи) состоит из блоков имитации ограничений на степени свободы механической
системы
Sensors &
Actuators
(Датчики и приводы) содержит блоки, имитирующие измерители параметров меха-
нического движения и блоки задания движения частей механизма
Utilities
(Утилиты) включает вспомогательные блоки, полезные при создании модели меха-
низма
Demos
(Демонстрационные программы) позволяет вызвать на исполнение демонстрацион-
433
ные модели
Раздел
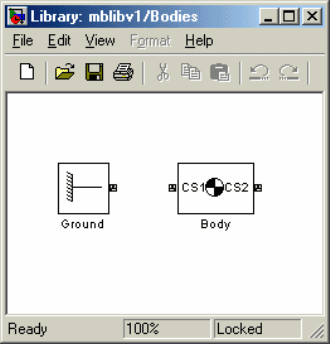
Bodies содержит (рис. 2) 2 блока: Ground и Body.
Блок Ground (Основание) является обязательным при построении модели любого механизма. Он представляет
неизменные точки основания (Земли), неподвижные в абсолютном (инерциальном) пространстве. Движение
отдельных частей механизма задаются или определяются по отношению к системе координат, воплощаемой
именно этим блоком.
Блок Body (Тело) представляет отдельную часть механизма, рассматриваемую как твердое тело,
движение ко-
торого моделируется. В нем задаются масса и матрица инерции этого твердого тела, его начальное положение и
ориентация (т. е. положение и ориентация систем координат CS, жестко связанных с ним). В число систем ко-
ординат, жестко связанных с телом, обязательно входит система CG (Center of Gravity), начало которой совме-
щено с центром тяжести тела. Именно
относительно осей этой системы координат задается матрица моментов
инерции тела.
Рис. 11.2. Содержимое раздела Bodies
Раздел Joints (Сочленения) содержит блоки, обеспечивающие возможность относительных движений между
телами, представленными отдельными блоками Body, т. е. обеспечение необходимых степеней свободы (DoFs).
Сюда входят блоки Prismatic, Revolute, Spherical, имитирующие простейшие призматические, шарнирные и
сферические сочленения, и блоки сложных готовых сочленений.
В разделе Constraints & Drivers (Связи и двигатели) собраны блоки, задающие предварительные ограничения на
относительные перемещения
между телами. Эти ограничения могут быть заданы как независимые от времени
связи (блоки Constraints) и как зависящие от времени движения по степеням свободы (блоки Drivers).
Раздел Sensors & Actuators (Датчики и приводы) включает блоки Sensors для измерения относительных движе-
ний тел и блоки Actuators для задания относительных движений. Именно эти блоки организуют связь между
механическими блоками библиотеки
SimMechanics
и обычными S- блоками, что позволяет, с одной стороны,
использовать возможности библиотеки
SIMULINK
для формирования заданных движений, а, с другой, - ис-
пользовать S-блоки для вывода результатов моделирования движения тел.
При составлении блок-схем механизмов следует принимать во внимание следующие обстоятельства.
1. Основу блок-схемы любого механизма составляет цепь типа
Ground – Joint – Body – Joint - … - Body
с открытой или закрытой топологией, где, по крайней мере, одно из тел представлено блоком Ground.
Блоки
Body могут иметь более двух соединенных с ним блоков Joint, фиксируя разветвления указанной последова-
тельности. Но каждое сочленение (блок Joint) должно быть подсоединено к двум и только двум телам.
2. Между блоками Body могут быть соединены и блоками Driver или Constraint, имитирующими связи.
3. Блоки Actuator и Sensor могут быть подсоединены к любому из блоков Body, Joint или Driver, но только
через
дополнительные порты, устанавливаемых в окнах настраивания этих блоков.
4. Задание желаемого закона изменения во времени параметров движения возможно только с помощью блоков
Actuator, а вывод результатов в рабочее пространство MatLab – через блоки Sensor, которые связывают блоки
SimMechanics
со средой
Simulink
.
434
Раздел Bodies
На рис. 3 показано окно настраивания блока Ground.
Рис. 11.3. Окно настраивания блока Ground
В нем лишь один параметр настраивания – вектор смещения начала системы координат, связанной с неподвиж-
ной частью механизма относительно начала инерциальной системы координат.
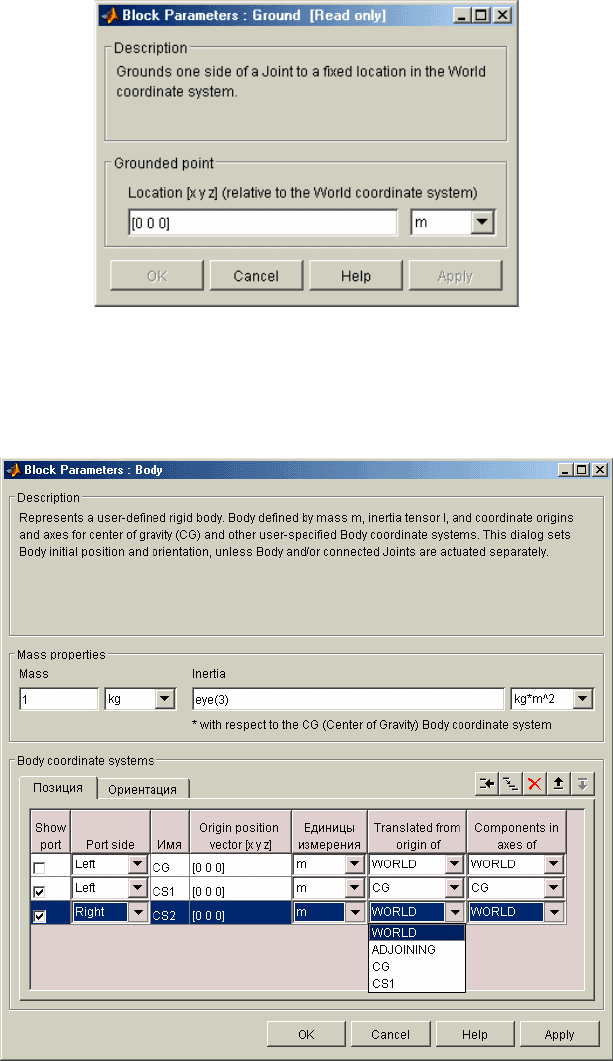
Окно настраивания блока Body представлено на рис. 4 и 5.
Рис. 11.4. Окно настраивания блока Body. Вкладка Позиция
Оно содержит такие параметры настраивания:
Mass
(Масса) здесь указывается величина массы той части механизма, которая представляется как
твердое тело
Inertia
(Моменты инерции) тут задается квадратная матрица (3×3) моментов инерции тела относи-
тельно ортогональных осей, жестко связанных с телом и проходящих через центр тяжести
тела
В поле Body coordinate systems (Системы координат, связанные с телом) расположены две вкладки: Позиция и
Ориентация.
Во вкладке Позиция (рис. 4) расположена таблица ввода координат начала систем координат, связанных с те-
лом. По умолчанию, эта таблица содержит три строки и позволяет задать три координатные системы, связан-
435
ные с телом:
- систему координат CG, начало которой совмещено с центром тяжести тела;
- систему координат CS1, "привязанной" к левому порту ("входу") блока Body;
- систему координат CS2, "привязанной" к правому порту ("выходу") блока Body.
В каждой строке предусмотрено введение 7 характеристик соответствующей системы координат:
Show port
(Показать порт) установка (или сброс) флажка в этой колонке позволяет ввести (или
убрать) на изображении блока изображение порта, связанного с соответствующей сис-
темой координат тела
Port side
(Сторона порта) позволяет установить изображение порта слева или справа на изо-
бражении блока
Имя
здесь устанавливается идентификатор вводимой системы координат
Origin position
vector [x, y. z]
(Вектор положения начала) содержит вектор координат начала соответствующей сис-
темы координат
Единицы измерения
здесь устанавливается единицы измерения длины, в которых установлены координаты
начала
Translated from
origin of
(Отсчитывается от начала системы координат…) указывается имя (идентификатор)
системы координат, от начала которой отсчитываются координаты устанавливаемой
системы координат
Components in
axes of
(Компоненты в осях системы координат …) указывается имя (идентификатор) систе-
мы координат, в проекциях на оси которой установлены координаты начала устанав-
ливаемой системы координат
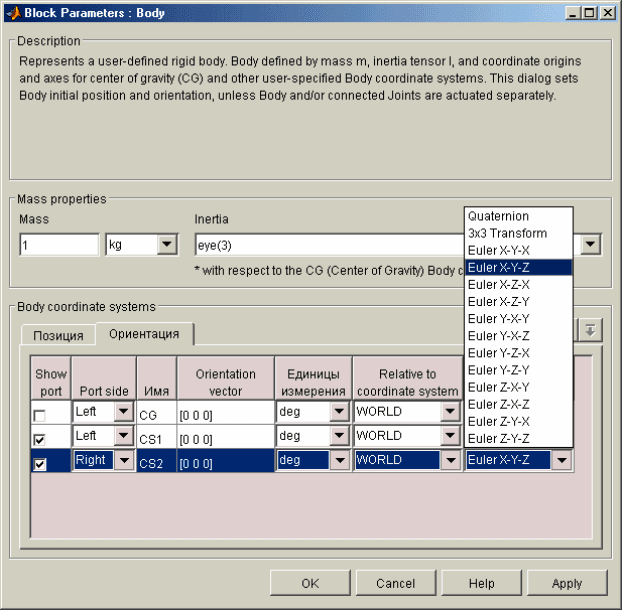
Вкладка Ориентация (рис. 5) устроена аналогичным образом и позволяет установить начальную угловую ори-
ентацию вводимой системы координат. Отличия заключаются в следующем. Вместо вектора координат начала
в четвертой колонке
вводится вектор углов поворота вводимой системы координат относительно исходной, имя
которой указывается в шестой колонке. При этом принимаемая последовательность поворотов вокруг коорди-
натных осей указывается в седьмой колонке.
Каждому месту соединения тела (блока Body) с другим телом (блоком Body) соответствует своя отдельная сис-
тема координат CS. Количество точек соединения тела с другими телами (а
, значит, и количество связанных с
телом систем координат) можно увеличить или уменьшить, пользуясь значками на панели инструментов, нахо-
дящейся в поле Body coordinate systems.
Рис. 11.5. Окно настраивания блока Body. Вкладка Ориентация
436
На рис. 5 показан список возможного выбора систем координат отсчета. В него входят инерциальная система
отсчета WORLD, все имеющиеся на вкладке системы координат, а также система ADJOINING, под которой
понимается система координат, связанная жестко с тем сочленением, которое подсоединено к телу.
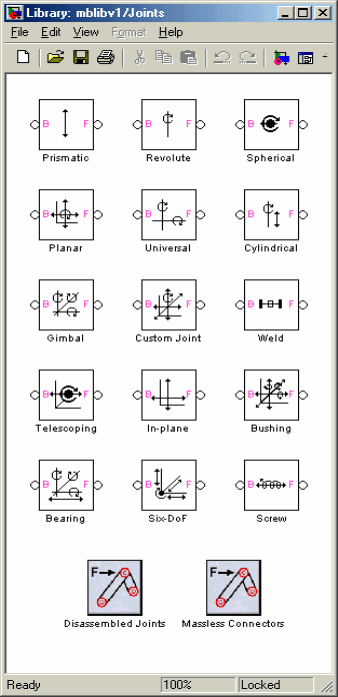
Раздел Joints
В разделе Joints находятся 15 блоков различных видов сочленений (рис. 6) и два подраздела Disassembled Joints
(Разобранные сочленения) и Massless Connectors (Безинерционные соединители).
Блоки этого подраздела имеют два обязательных порта, с помощью которых они подсоединяются к двум бло-
кам из раздела Bodies. Один из этих портов отмечен индексом B (Base – Основной), другой – индексом F (Fol-
lower - Следующий). Первый предназначен для соединения с блоком
Body, представляющим первое (основное)
тело, второй – для подсоединения к следующему телу в связанной цепи тел, составляющих механизм.
Рис. 11.6. Содержимое раздела Joints
Рассмотрим некоторые наиболее простые и важные блоки.
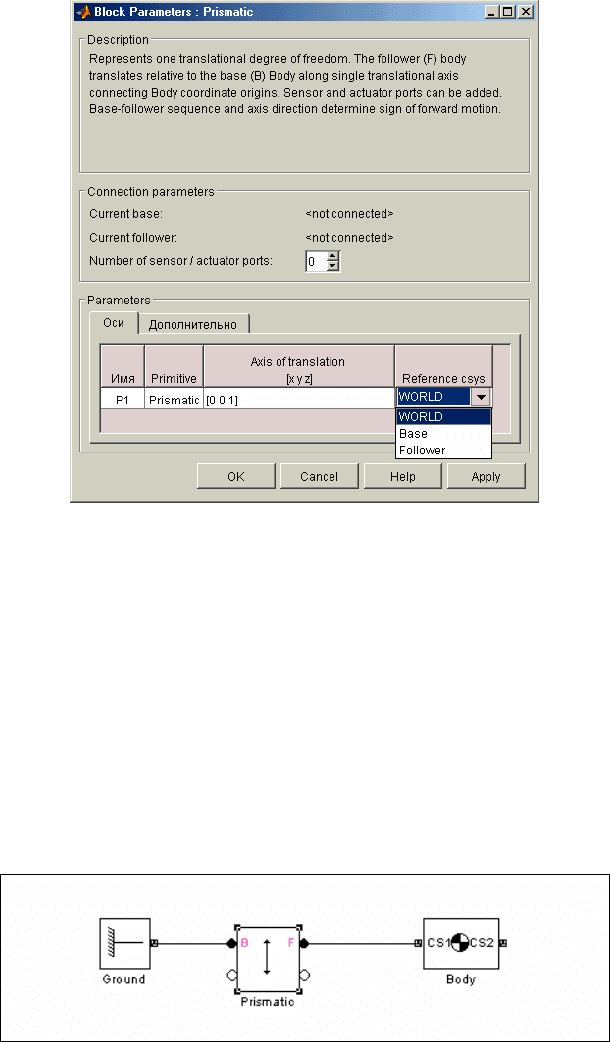
Начнем с блока Prismatic. Он обеспечивает одну поступательную степень свободы вдоль оси, указанной во
вкладке Оси окна его настраивания (рис. 7).
437
Рис. 11.7. Окно настраивания блока Prismatic
На рис. 7 такой осью свободного перемещения установлена третья ось (z) инерциальной системы координат.
Как видно из того же рисунка, имеется возможность связать ось относительного перемещения также с одной из
осей первого тела, с которым связан блок Prismatic (выбрав Base из предлагаемого списка), либо с одной из
осей системы координат,
связанной со вторым телом (выбрав Follower).
В поле Connection parameters (Параметры соединения) указаны три параметра – Current base (Текущая база),
Current follower (Текущее ведомое тело) и Number of sensor/actuator ports (Число портов для измерителей и воз-
будителей движения). Первые два параметра не устанавливаются пользователем и указывают название блока
тела, к которому подсоединен соответствующий порт блока Joint. Если блок Joint не подсоединен к телам, то,
как видно из рис 7 напротив этих параметров появляется запись <not connected> (не соединен).
Образуем простейшую цепь из трех блоков Ground, Prismatic и Body (рис. 8), одновременно установив в блоке
Prismatic два дополнительных порта для подсоединения блоков Actuator и Sensor. Теперь окно настаивания
блока Prismatic будет выглядеть так, как показано на рис. 9.
Рис. 11.8. Простейшая механическая цепь
438
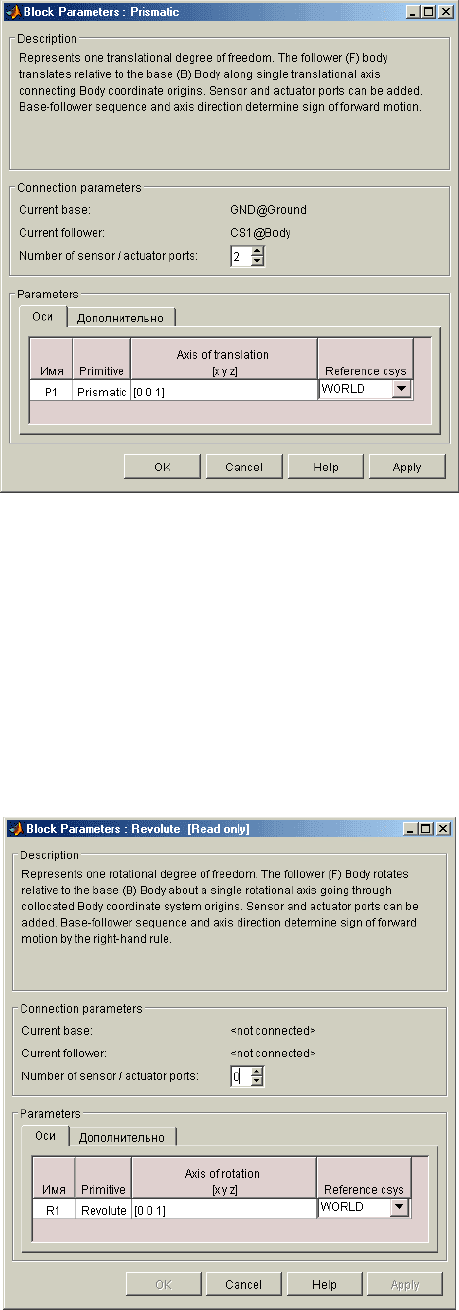
Рис. 11.9. Окно настраивания подсоединенного блока Prismatic
Как видим, теперь текущая база автоматически установлена GND@Ground, что означает, что база отождествле-
на с системой координат GND блока Ground, а ведомое тело Follower (CS1@Body) связано с системой коорди-
нат CS1 блока Body.
При этом на изображении блока Prismatic появились изображения двух дополнительных портов. С ними теперь
можно соединить блоки измерителей (Sensor) и (или)
возбудителей (Actuator) движения.
Окно настраивания (рис. 10) следующего блока - Revolute (цилиндрический шарнир) – практически не отлича-
ется от предыдущего. Отличие лишь в том, что в нем устанавливается направление оси вращения тела Follower
относительно тела Base.
Следует заметить, что элементарное сочленение типа Prismatic имеет внутреннее обозначение P, а сочленение
типа цилиндрического шарнира – обозначение R.
Рис. 11.10. Окно настраивания блока Revolute

439
Рис. 11.11. Окно настраивания блока In-plane
Блок In-plane обеспечивает свободу относительного поступательного движения двух тел в плоскости осей, на-
правления которых установлено в окне настраивания (рис. 11). Нетрудно убедиться, что он представляет собой
последовательное соединение двух элементарных сочленений P1 и P2 типа Prismatic. Первое из них (P1) обес-
печивает свободу перемещения второго (P2) вдоль оси, направление которой указывается в
первой строке
вкладки Оси окна настраивания. Во второй строке той же вкладки устанавливается направление второй оси
свободного перемещения.
Блок Universal обеспечивает свободу углового перемещения тела Follower относительно тела Base относитель-
но двух осей, задаваемых в окне его настраивания (рис. 12). Он представляет собой последовательное соедине-
ние двух элементарных сочленений R1 и R2 типа Revolute.
Рис. 11.12. Окно настраивания блока Universal
440
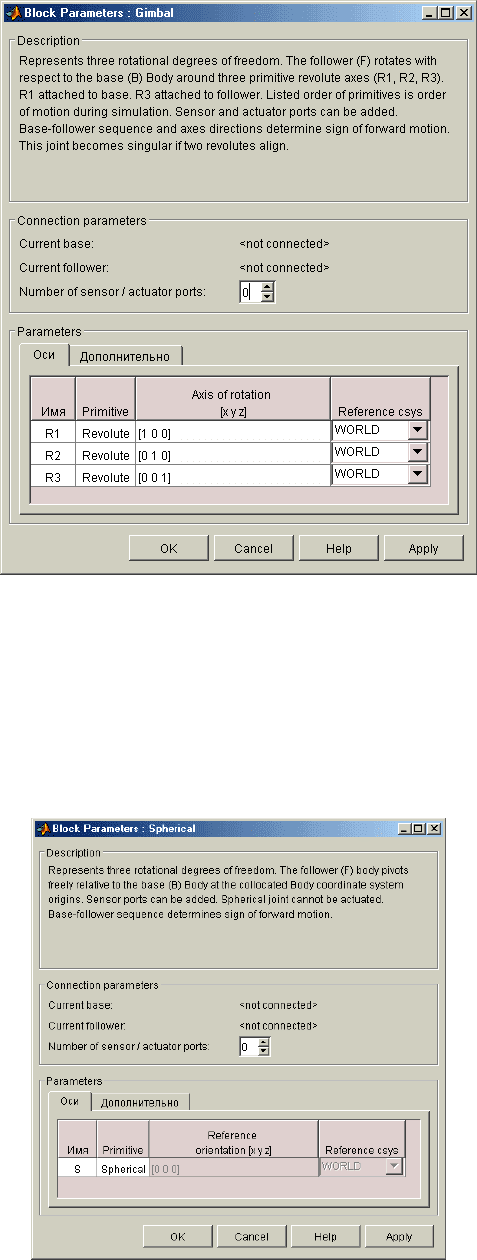
Следующий блок Gimbal (карданов подвес) представляет собой последовательное соединение трех элементар-
ных сочленений R1, R2 и R3 типа Revolute и обеспечивает свободу углового перемещения одного тела относи-
тельно другого вокруг трех, в общем случае некомпланарных осей, указанных в окне настраивания (рис. 13).
Рис. 11.13. Окно настраивания блока Gimbal
Блок Spherical (Сферический шарнир), как и предыдущий блок, обеспечивает три угловые степени свободы от-
носительного перемещения двух тел. Отличия заключаются в следующем. Во-первых, в блоке Spherical нет
явно выраженных осей вращения, и поэтому они не устанавливаются в его окне настраивания. Во вторых,
вследствие этой особенности, к блоку Spherical
не может быть подсоединен блок возбуждения движения (Ac-
tuator), а параметры относительных поворотов тел не могут быть представлены в углах поворотов, а лишь в ви-
де вектора составляющих кватерниона поворота второго тела (Follower) относительно первого (Base).
Рис. 11.14. Окно настраивания блока Spherical