Lalanne C. Mechanical Vibrations and Shocks: Mechanical Shock Volume II
Подождите немного. Документ загружается.


284
Mechanical
shock
shock
and
thus lead
to
better being able
to
take account
of the
couple shock
duration/amplitude.
4. To
specifically
exclude
certain methods
The
test
requester
can
give
an
opinion
on the way of
proceeding
so
that
the
test
is
correct. He/she
can
also exclude certain testing methods
a
priori when he/she knows
that
they cannot give good results. He/she
can
even remove
the
need
of
choice
to the
test laboratory
and
specify
the
method
to be
used,
as
well
as the
whole
of the
parameters that define
the
shock (for example,
for
components
of
damped sine type,
frequencies,
damping
factors
and
amplitudes,
etc.).
Only laboratories equipped
to
use
this method will
be
able
to
carry
out
this test, however [SMA
75]
[SMA 85].
9.11.2.
Specification
of
a
complementary
parameter
Several proposals have been made.
The
simplest suggests limiting arbitrarily
the
duration
of the
synthesized shock
to 20 ms
(with equal shock spectrum) [RUB 86].
Others introduce
an
additional parameter
to
better attempt
to
respect
the
amplitude
shock duration.
9.11.2.1.
Rms
duration
of
the
shock
Let
us set
x(t)
as a
shock
of
Fourier transform
of
X(Q)
. The rms
duration
is
defined
by
[SMA 75]:
E is
referred
as the
'energy
of
the
shock'.
It is
necessary that
E is
finite,
ie
that
l
x(t) approaches zero more quickly than
—,
when
t
tends
towards
- o or + o.
r
In
a
general way,
the rms
duration
of a
transient
is a
function
of the
origin
of
times
selected.
To
avoid this
difficulty,
one
chooses
the
origin
in
order
to
minimize
the rms
duration.
If
another origin
is
considered,
the rms
duration
can be
minimized
by
introducing
a
time-constant
T
(shift)
equal
to
[SMA 75]:
Control
of a
shaker
using
a
shock
response
spectrum
285
The rms
duration
is a
measure
of the
central tendency
of a
shock.
Let us
consider,
for
example
a
transient
of a
certain
finite
energy, composed
of all the
frequencies
equal
in
quantity.
An
impulse
(function
5)
represents
a
shock
of
this
type with
one
minimum duration.
A low
level random signal, long duration
represents
it
with
one
maximum duration.
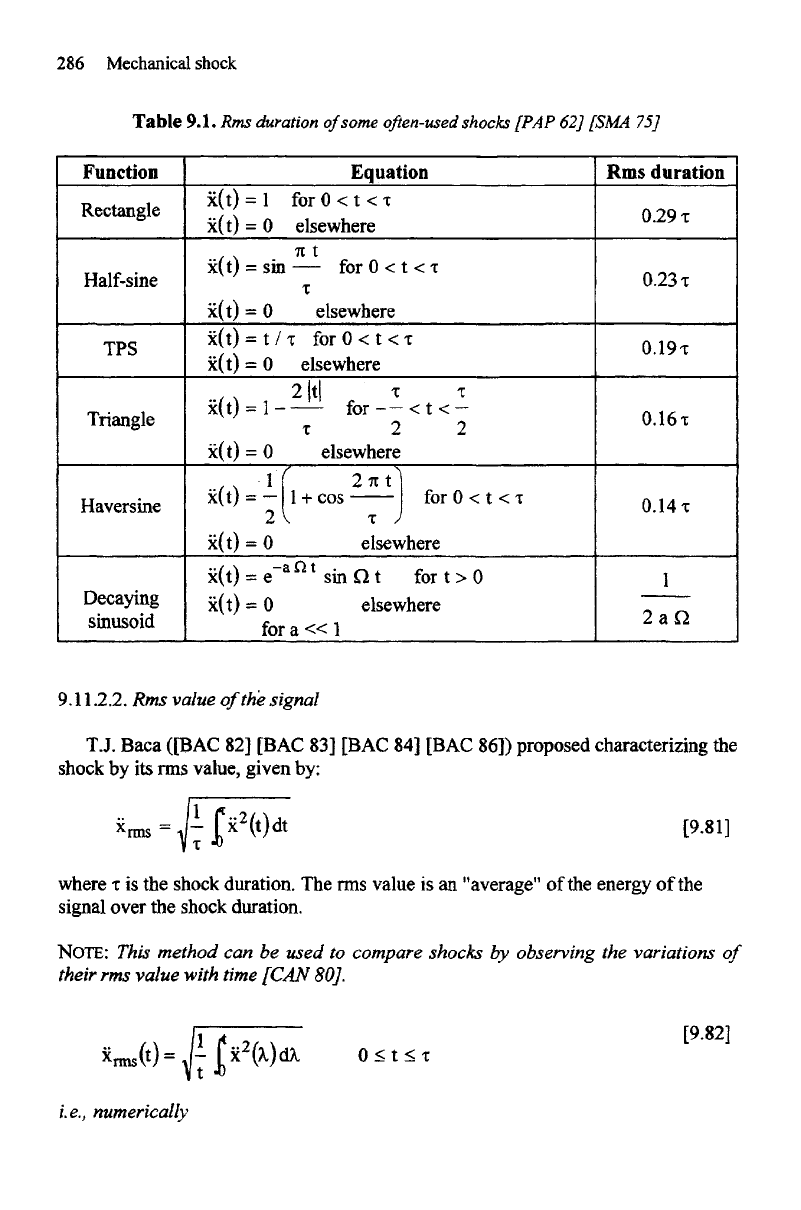
The rms
duration
of
most current transients
is
given
in
Table 9.1. This duration
can
also
be
calculated starting
from
[PAP 62]:
where
If
the
amplitude X
m
(Q)
of the
Fourier transform
of is
specified,
the rms
d<j>
duration
minimum
is
given
by — = 0,
i.e.
by
<|)(Q)
=
constant.
The
constant
can be
dD
zero. Equation [9.79] implies that
the rms
duration
is
related
to the
smoothness
of
the
Fourier spectrum (amplitude
and
phase
at the
same time).
The
more
the
spectrum
is
smoothed,
the
shorter
the rms
duration.
286
Mechanical
shock
Table
9.1.
Rms
duration
of
some
often-used
shocks [PAP
62]
[SMA
75]
Function
Rectangle
Half-sine
TPS
Triangle
Haversine
Decaying
sinusoid
Equation
x(t)
= 1 for 0 < t < T
x(t)
= 0
elsewhere
7t
t
x(t)
= sin — for 0 < t < t
T
x(t)
= 0
elsewhere
x(t)
= t/T
forO<t<t
x(t)
= 0
elsewhere
2 |t| T T
x(t)
= l
for--<t<-
T
22
x(t)
= 0
elsewhere
..
if
2nt}
x(t)
= — 1 + cos for 0 < t < T
2V
T )
x(t)
= 0
elsewhere
x(t)
=
e~
aQt
sinQt
for t > 0
x(t)
= 0
elsewhere
for
a « 1
Rms
duration
0.29
T
0.23
T
0.19-c
0.16T
0.14
1
1
2aQ
9.11.2.2.
Rms
value
of
the
signal
T.J. Baca ([BAG
82]
[BAC
83]
[BAC
84]
[BAC 86])
proposed characterizing
the
shock
by its rms
value, given
by:
where
T is the
shock duration.
The rms
value
is an
"average"
of the
energy
of the
signal over
the
shock duration.
NOTE: This
method
can be
used
to
compare shocks
by
observing
the
variations
of
their
rms
value with time [CAN 80].
i.e.,
numerically
Control
of a
shaker using
a
shock
response
spectrum
287
where
N =
total number
of
points
defining
the
signal.
9.11.2.3.
Rms
value
in the
frequency domain
The
rms
value
is a
means
of
highlighting
the
contents
of the frequency of a
shock.
It can
also
be
calculated
in the
domain
of the frequencies
[BAC
82]
[BAC
83]
[BAC 84],
by
application
of
Parseval's
theorem:
where
the
Fourier transform X(f)
of
x(t)
is
such that:
and
where
F
c
is the
cut-off
frequency
which limits
the
useful
frequency
range,
taking into account
the
symmetry
of
|x(f
)| ,
yielding:
NOTE:
Also, according
to the frequency:
where
f is the
current
frequency at
which
the rms
value
is
calculated.
This
expression
thus makes
it
possible
to
highlight
the
contribution
of
all the frequencies
(lower
than
Fc) for a
shock
of
duration
T.
288
Mechanical shock
9.11.2.4. Histogram
of
the
peaks
of
the
signal
The
shock spectrum does
not
give
any
direct information concerning
the
number
of
peaks
of the
signal x(t).
The
histogram
of the
peaks
(a
peak being
the
maximum
or
minimum between
two
zero
passages)
could constitute
a
complementary data
(by
possibly standardizing
the
ordinate
of the
curve
by
division
by the
amplitude
of the
largest
peak).
If
this technique
is
used,
it is
important
to
specify
the
type
of
filtering which
the
signal
underwent before establishment
of the
histogram,
the
comparison
of two
shocks making sense only
if
they were filtered under
the
same conditions (same
frequency
limits).
9.11.2.5.
Use
of
the
fatigue
damage spectrum
Being
given
a
shock
x(t),
the
fatigue damage spectrum D(f
0
) (cf. Volume
5) is
calculated starting
from the
response relative displacement z(t)
of a
linear one-
degree-of-freedom
mechanical system
of
natural
frequency f
0
and of
quality factor
Q:
The
number
N of
cycles
to the
rupture
is
extracted
from the
Basquin
law N a = C
(b and C are
constant
functions
of the
material constituting
the
part). This yields,
since
a = K z
The
damage
at frequency f
0
takes into account
the
number
of
peaks
ni of
amplitude
Zj
(histogram
of the
peaks
of the
response).
The
fatigue damage spectrum, which
includes
characteristics
of the
signal such
as the
duration
and the
histogram,
is
very
complementary
to the
response spectrum
and
could thus
be
specified jointly with
the
shock response spectrum
to
define
a
test.
9.11.3.
Remarks
on the
characteristics
of
response
spectrum
The
need
to
specify
a
complementary parameter
is
much related
to the
fact
that
the
specified spectrum
is
defined only
for one
limited
frequency
range. When
it is
Control
of a
shaker using
a
shock response spectrum
289
calculated
in a
sufficiently
large
frequency
interval,
the
response
spectrum makes
it
possible
to
read
of
very
useful
information, such
as:
- At low
frequencies,
the
velocity change
AV
associated
with
the
shock
(slope
of
the
spectrum
in the
origin).
This
is not
strictly exact
if the
damping
is
zero.
However,
for the
usual values
of £, the
approximation
is
sufficient
to
determine
if
the
shock
is
associated
with
a
velocity change
or
not.
- At
high
frequencies,
the
magnitude
of
the
signal varies with time.
Consideration
of
these parameters should make
it
possible
to
obtain
a
simulation
much
more correctly akin
to the
real
shock.
It is
thus desirable
to
specify
the
shocks
with
a
spectrum calculated
in a
sufficiently
broad
frequency
range
to
allow reading
of
these values
on the
curve.
A
signal which
has a SRS
very close
to the SRS
specified
across
all the frequency
band
has
necessarily
the
same amplitude
and the
same velocity change
as the
origin
of
shock.
9.12. Estimate
of the
feasibility
of a
shock specified
by its SRS
Several methods were proposed
to
evaluate
the
feasibility
of a
shock specified
using
a
shock response spectrum.
9.12.1. C.D. Robbins
and
E.P.
Vaughan's
method
The
shakers
are
limited with respect
to
force. Possible
rms
acceleration xrms
is a
function
of the
total mass
M of the
test package including
the
mounting
fixture
and
attachments:
where Frms
=
maximum
rms
random force realizable
on the
shaker.
The
shaker
can
accept peak values equal
to
three times
the rms
force:
Each point
of the SRS is
simulated
by an
oscillatory signal having
the frequency
of
the SRS at
this point (Figure
9.35).
290
Mechanical shock
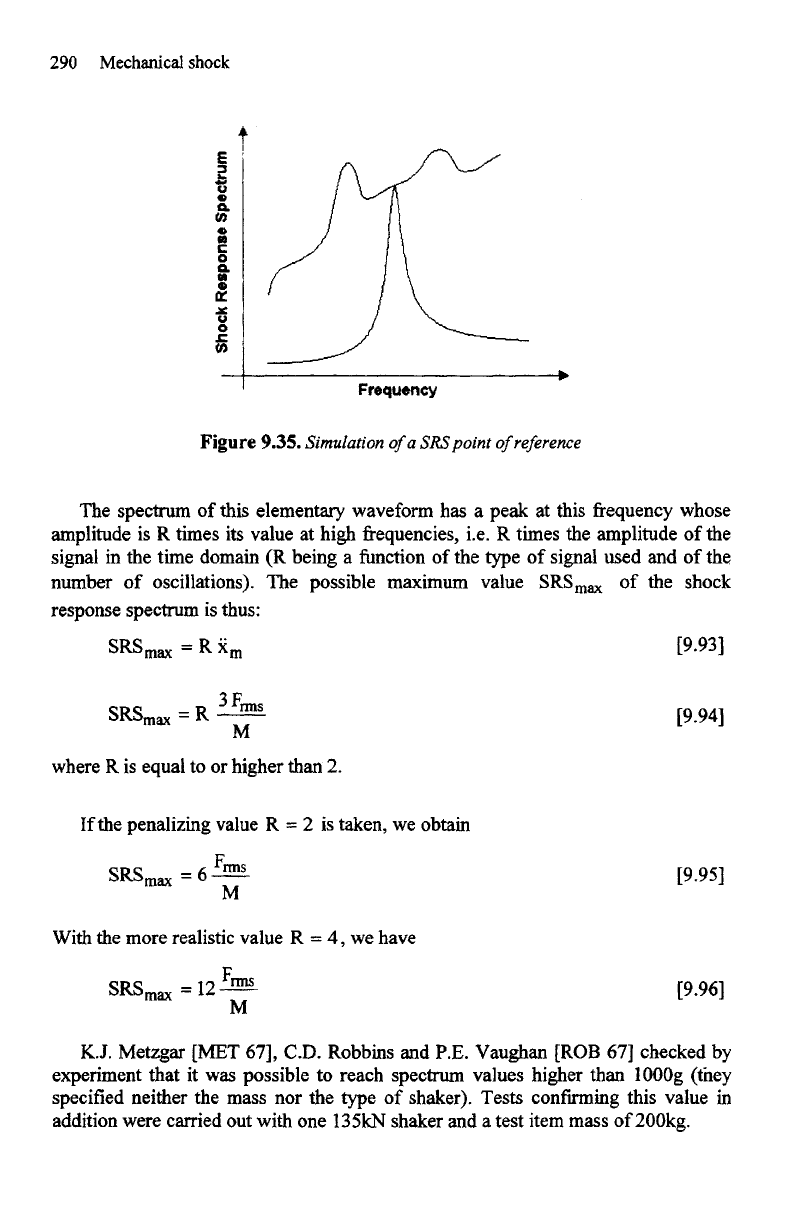
Figure
9.35. Simulation
of
a SRS
point
of
reference
The
spectrum
of
this elementary
waveform
has a
peak
at
this
frequency
whose
amplitude
is R
times
its
value
at
high
frequencies,
i.e.
R
tunes
the
amplitude
of the
signal
in the
time domain
(R
being
a
function
of the
type
of
signal used
and of the
number
of
oscillations).
The
possible
maximum value
SRS
max
of the
shock
response spectrum
is
thus:
where
R is
equal
to or
higher than
2.
If
the
penalizing
value
R = 2 is
taken,
we
obtain
With
the
more realistic value
R = 4, we
have
K.J.
Metzgar [MET 67], C.D. Robbins
and
P.E. Vaughan [ROB
67]
checked
by
experiment that
it was
possible
to
reach spectrum values higher than
l000g
(they
specified
neither
the
mass
nor the
type
of
shaker).
Tests
confirming
this value
in
addition
were carried
out
with
one
135kN shaker
and a
test
item mass
of
200kg.
Control
of a
shaker using
a
shock
response
spectrum
291
Problems
of
non-linearity
After
input
of the
specified
spectrum
on the
control system,
the
calculation
of the
drive signal
is
normally carried
out at low
amplitude,
for
example
10% of the
specification,
to
avoid damaging
the
test item while making
it
undergo
all the
shocks
necessary
to the
development procedure. Once
the
spectrum obtained
is
considered
to be
satisfactory,
one
applies
the
shock
to the
test
item.
For
small test items
or
larger test items
of
dead mass type,
it can be
agreed that
the
passage
from
level 1/10th
to
level
1 is
effected
linearly except
for
10%.
For
heavier test resonant items,
it is
preferable
if
possible,
to use a
dummy item
which
is
representative
for the
development
of the
test
in
order
to
guard against
possible significant non-linearity,
and to
carry
out
intermediate level shocks.
9.12.2. Evaluation
of
the
necessary
force, power
and
stroke
The
dynamic
force
necessary
to
carry
out a
shock
is
related
to
acceleration
on the
table
by the
relation [DES 83]:
where
-
F(Q)
and
X(Q)
are the
Fourier transforms
of
the
force F(t)
and
acceleration
x(t) respectively;
- m is the
total mass
of
the
test package (armature, table, fixture
and
test
item);
-
H(O)
is the
transfer function
of
the
test
item.
It
is
necessary
to
take account
of the
weight
of the
moving unit
if the
shaker,
for
a
vertical configuration, supports this load directly.
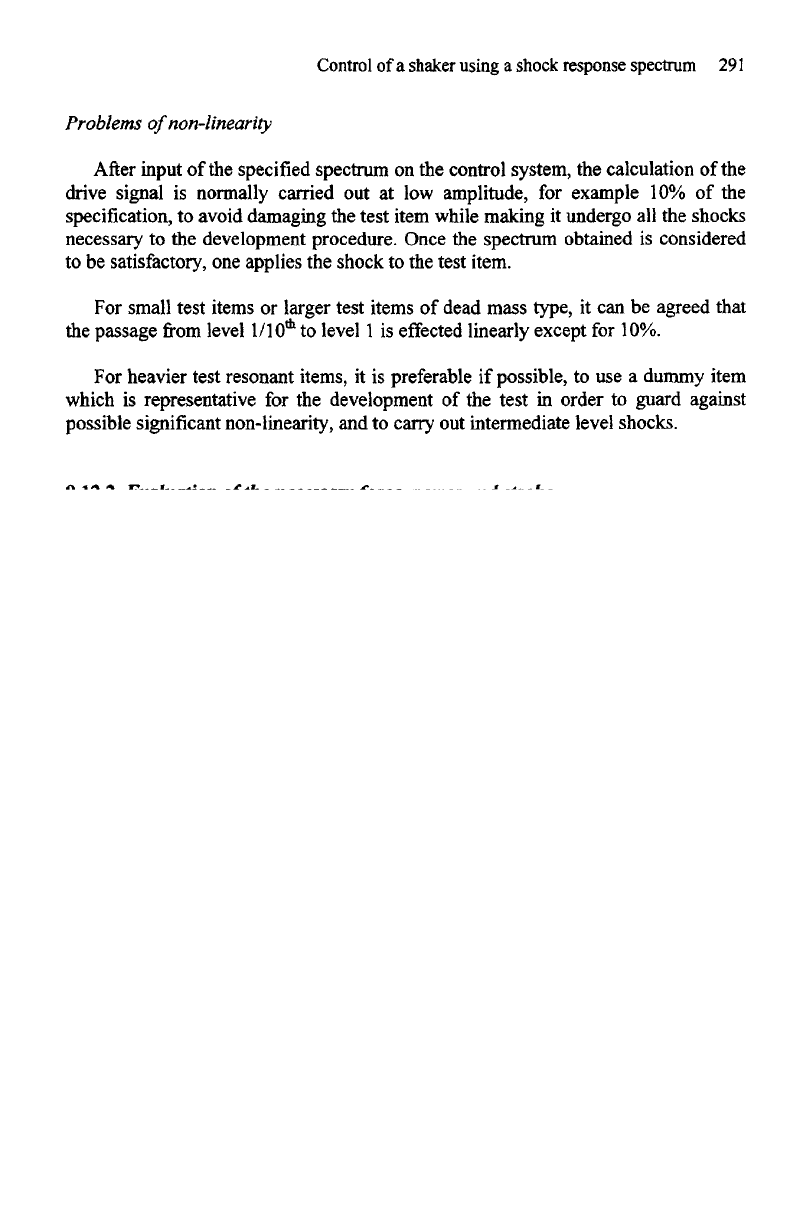
In
most practical cases,
the
test item
can be
represented, approximately,
by an
only
one-degree-of-freedom system,
of
natural
frequency o
sp
and
damping factor
£
sp
; this transfer
function
is
then written:
where
292
Mechanical shock
Figure 9.36.
One-degree-of-freedom
model
of
an
equipment tested
on a
shaker
Let
us set
SRS(f)
as the SRS
specified calculated
for a
damping equal
to £. By
definition,
each point
of
this spectrum gives
the
largest response
of a
linear one-
degree-of-freedom
transfer
function
system:
For the
usual values
of
damping factor
£, we
have,
at the
resonance
(f =
f
0
),
H(f)«
.
Knowing
in
addition that
the
response
of a
mechanical system
is
2i$
related
to the
excitation
by the
relation R(f)
=
H(f) X(f),
the
maximum
of the
response being
the
point
of the
SRS,
it
comes,
by
noting a(Q)
a
function
whose
module
is the SRS (
SRS(ft)
=
|o(Q)|):
yielding
The
necessary maximum force
is
obtained
in a
conservative
way for the
maximum
value
of
SRS.
Control
of a
shaker using
a
shock response spectrum
293
Let us set
V(Q)
as the
Fourier spectrum
of the
velocity
of the
table during
the
shock movement.
The
power necessary
is
given
by the
real part
of F
V(Q):
p
= m[F
V(Q)]
Knowing
that X(Q)
=
iQV(Q),
the
necessary maximum power
is
estimated
conservatively
from
[9.97]
and
[9.99]
by
Taking into account
[9.99],
the
Fourier
transform
of the
displacement during
the
shock
can be
written:
Conservatively,
Yielding